
Distributed Economic Control for AC/DC Hybrid Microgrid


Abstract
:1. Introduction
- Based on the distributed control theory of discrete consistency, the communication between distributed generators is realized, and the overall connection model is established.
- To achieve the optimal power allocation of distributed generation in subnet, an improved droop control approach based on an optimal power reference iterative algorithm is provided.
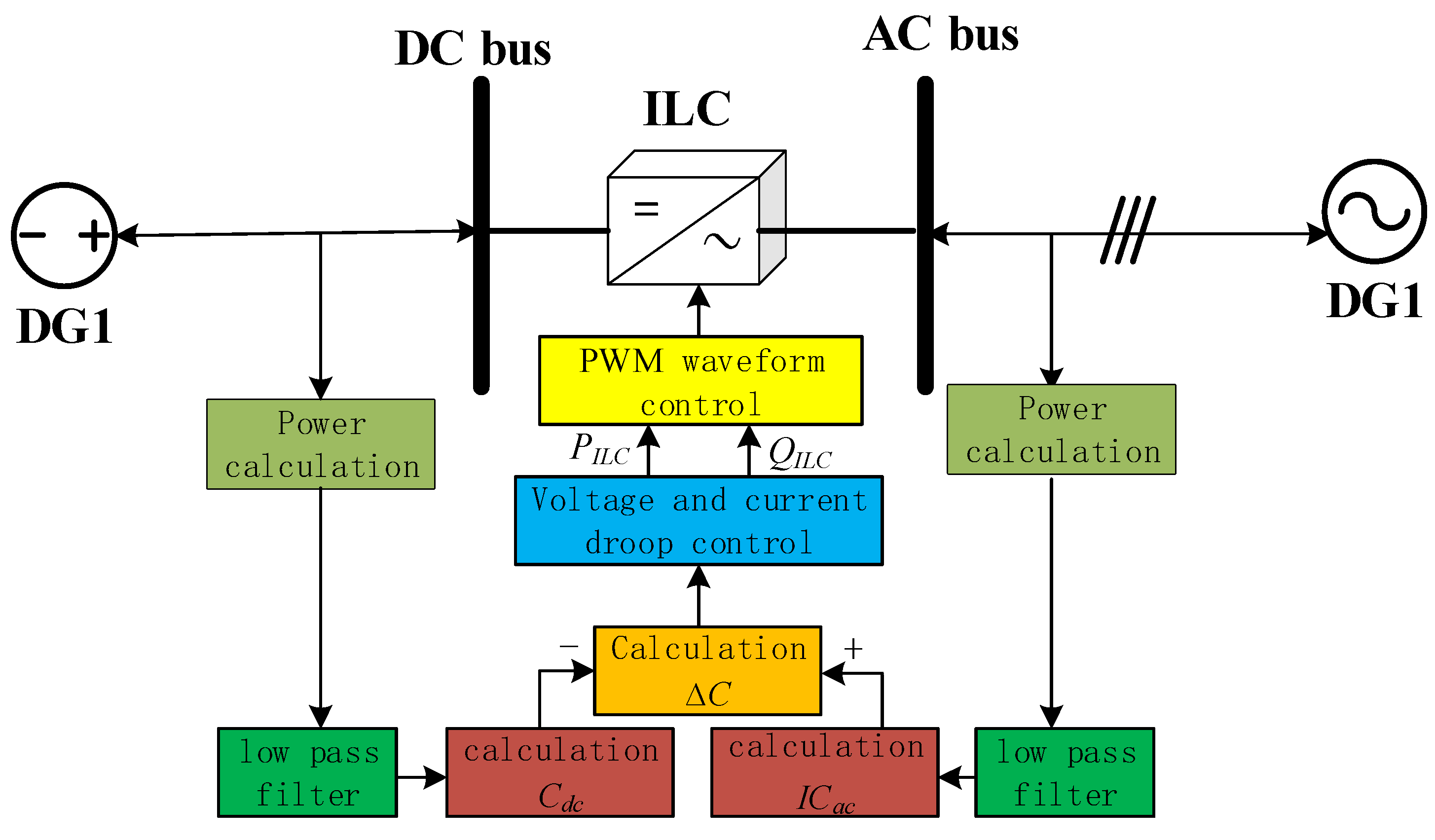
- An enhanced cost micro increment droop control approach based on the interconnection converter is presented to realize the economic operation between subnetworks.
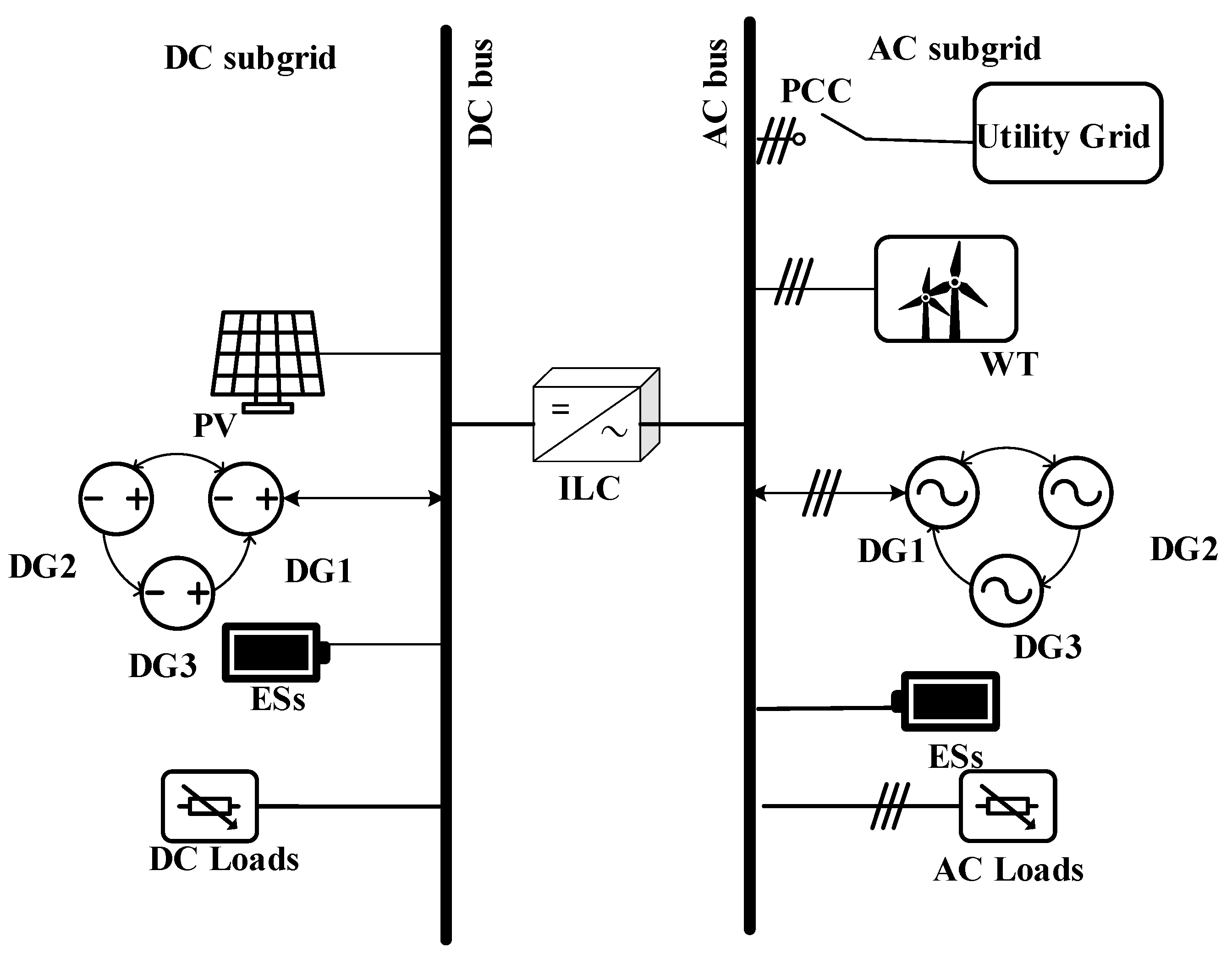
2. Distributed Control Principle of Hybrid Microgrid System Structure
2.1. Hybrid Microgrid System Structure
2.2. Graph Theory
2.3. Discrete Consistency Principle
2.4. Optimal Power Reference Iterative Algorithm
3. Hybrid AC/DC Microgrid Control Strategy
3.1. AC Subnet Control Target
3.2. DC Subnet Control Target
3.3. Microgrid Inter Group Control Targets
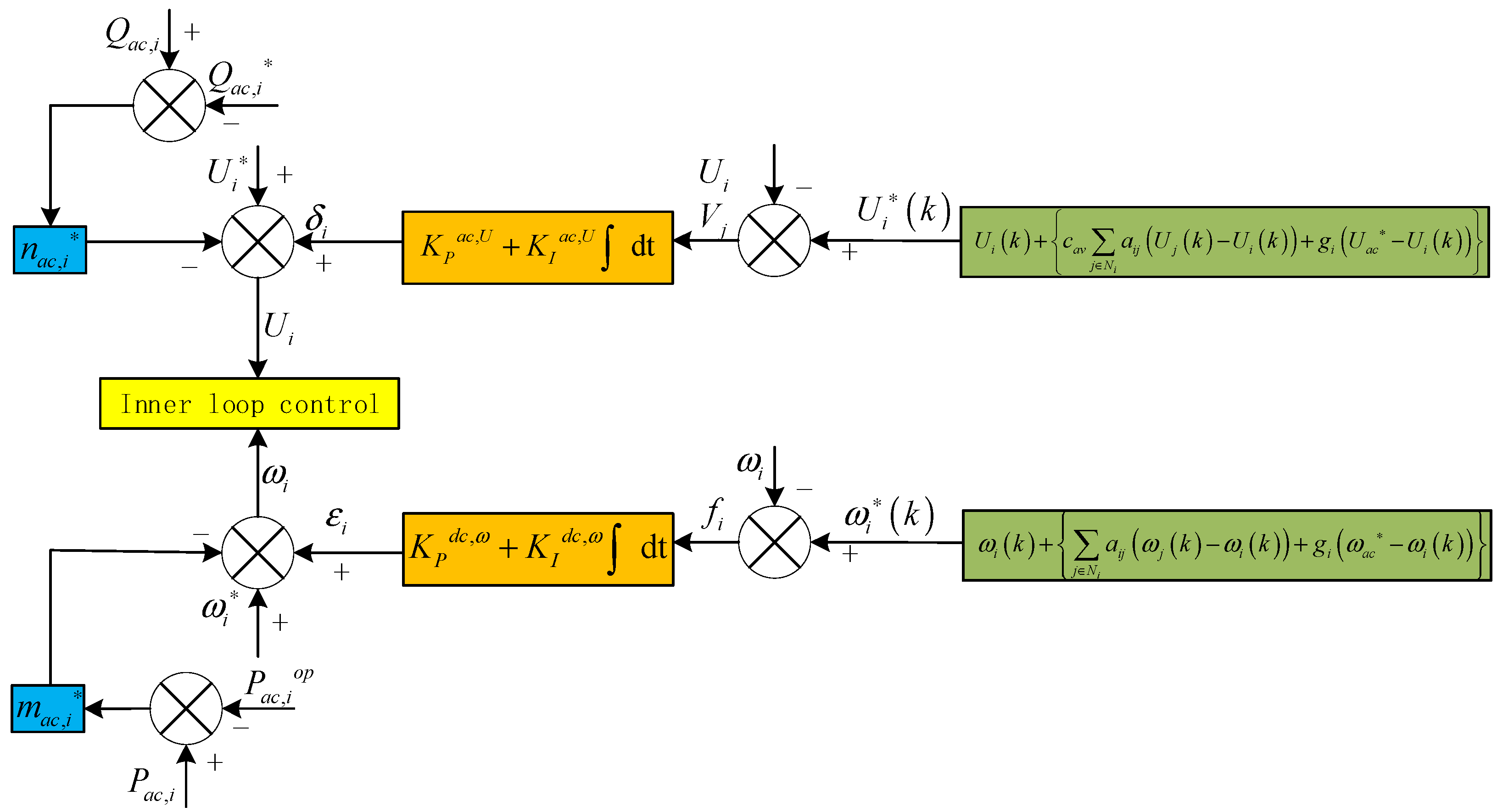
3.4. AC Subnet Control Strategy
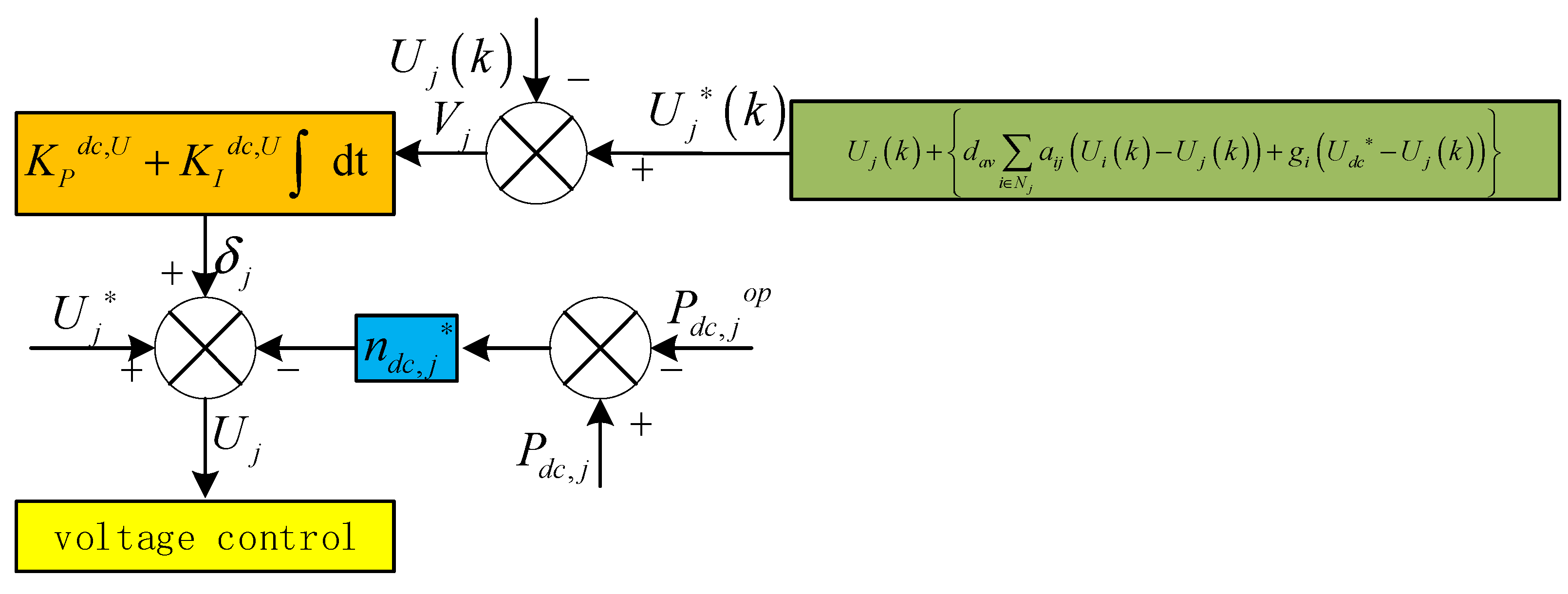
3.5. DC Subnet Control Strategy
3.6. Microgrid Groups Control Strategy
4. Case Analysis
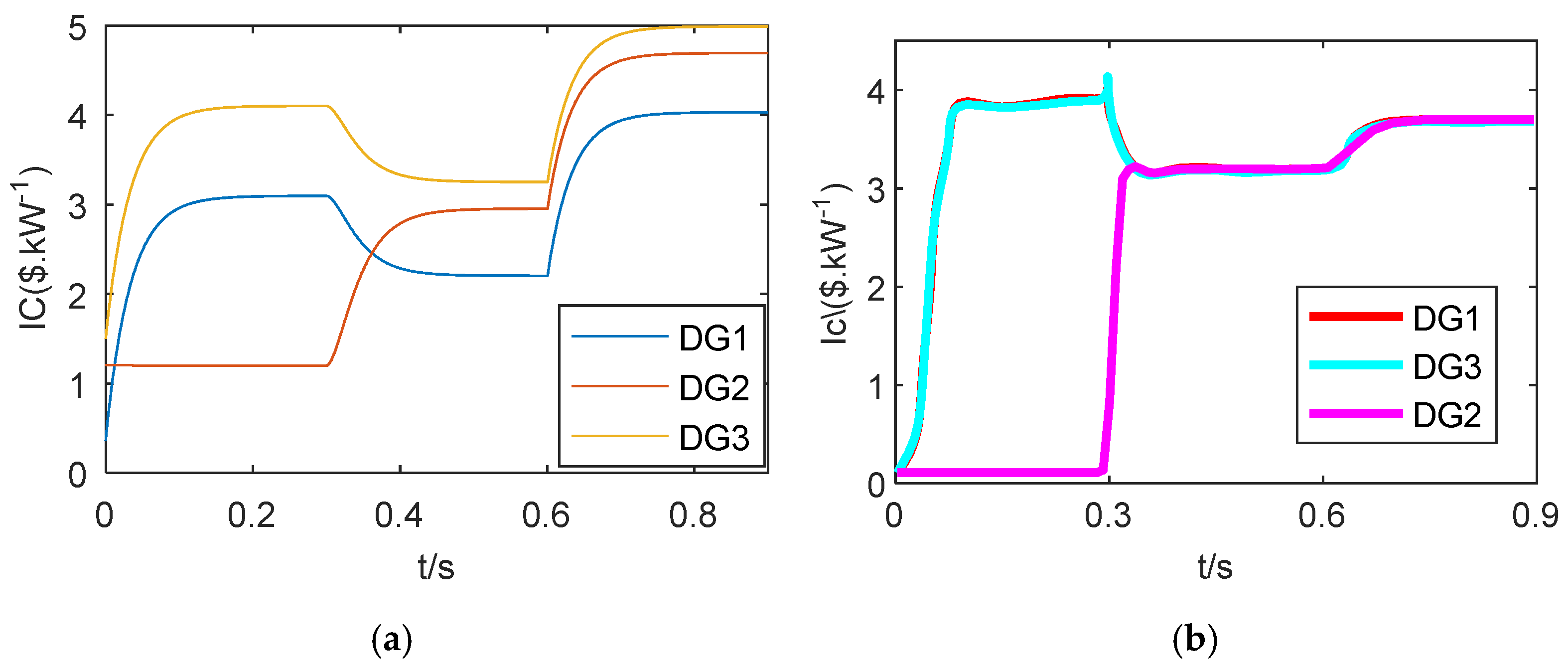
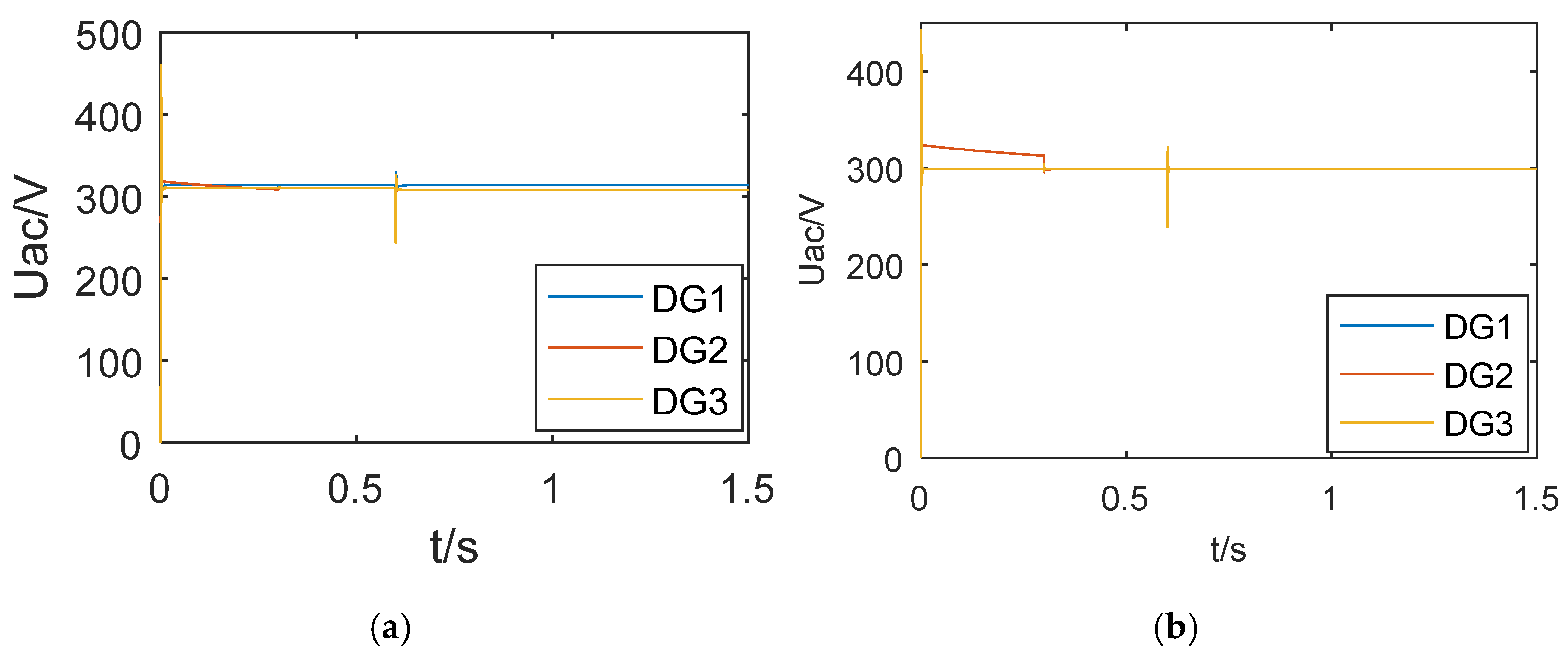
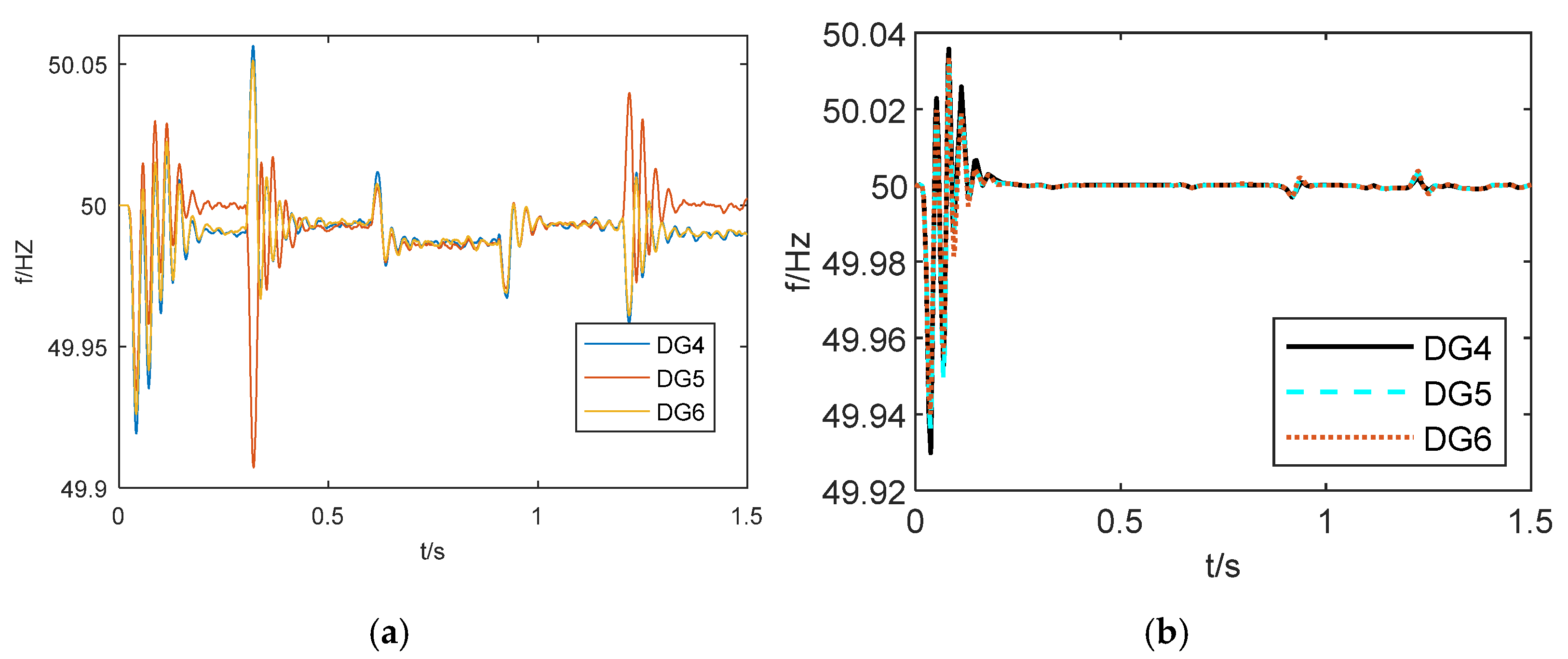
4.1. AC Subnet Simulation Test
4.2. DC Subnet Simulation Test
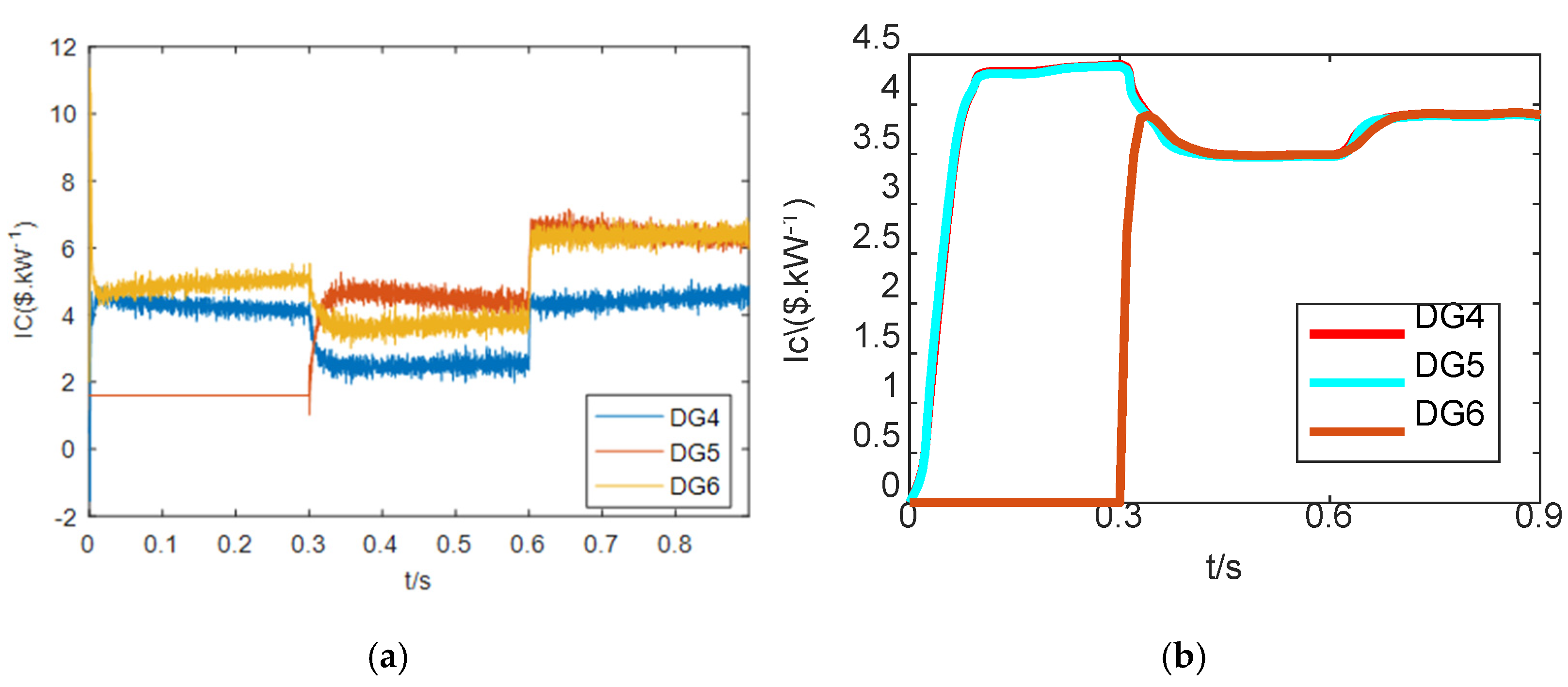
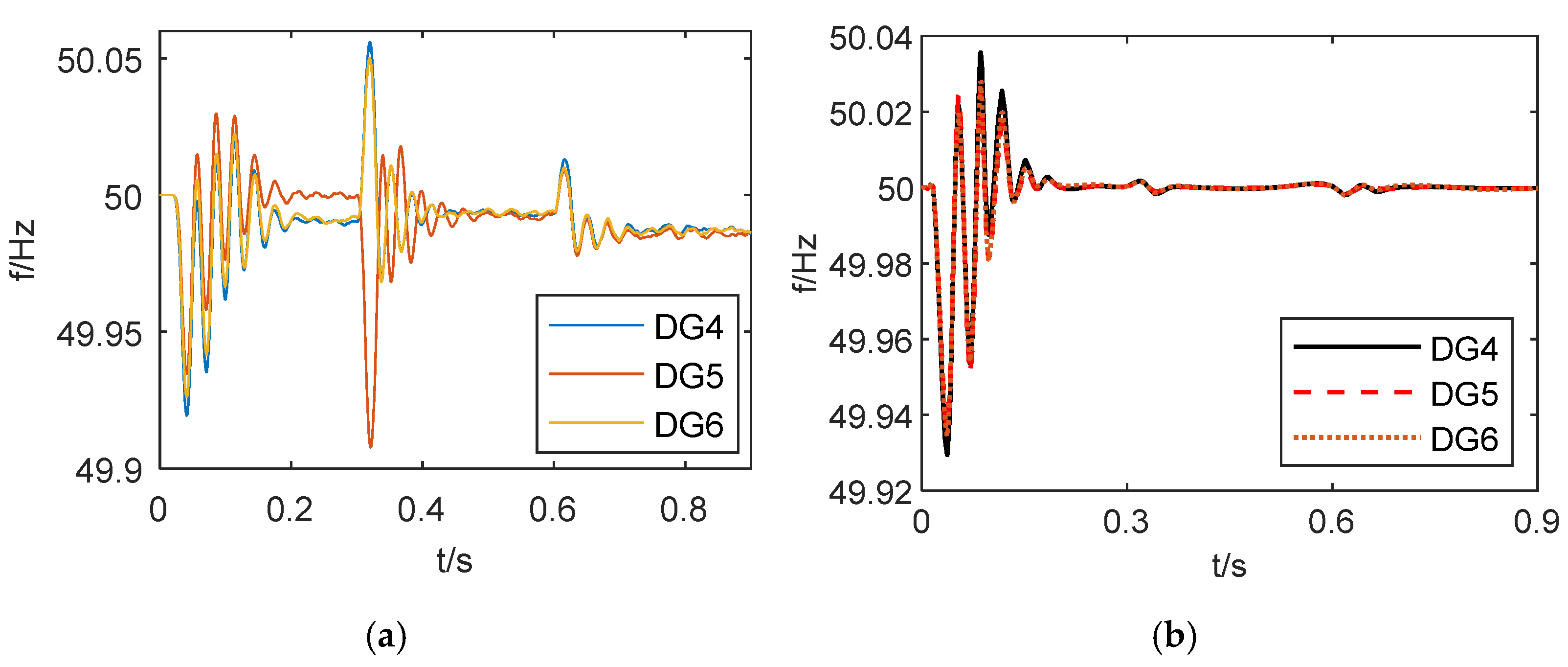
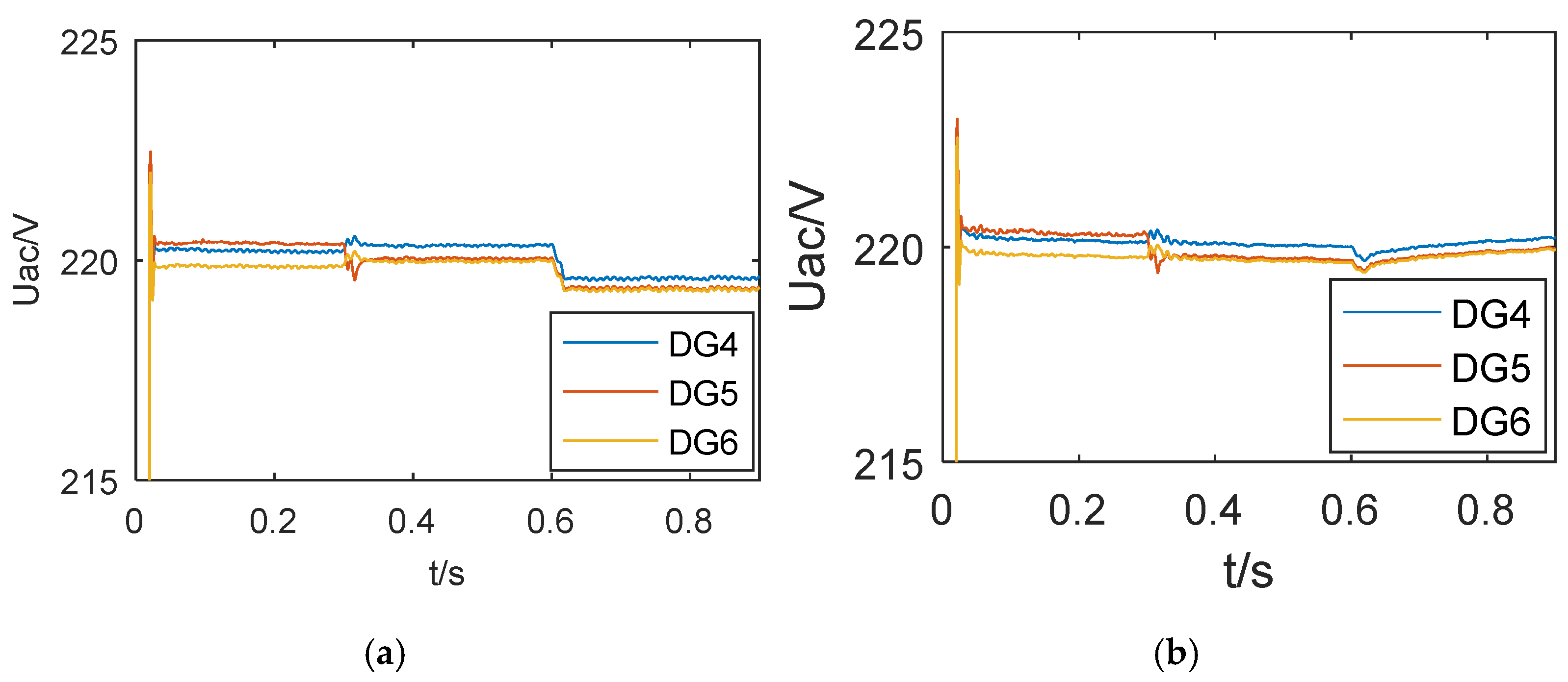
4.3. Microgrid Inter Group Control Test
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Karim, M.A.; Currie, J.; Lie, T.-T. A machine learning based optimized energy dispatching scheme for restoring a hybrid microgrid. Electr. Power Syst. Res. 2018, 155, 206–215. [Google Scholar] [CrossRef] [Green Version]
- Silva, D.P.E.; Félix Salles, J.L.; Fardin, J.F.; Pereira, M.M. Management of an island and grid-connected microgrid using hybrid economic model predictive control with weather data. Appl. Energy 2020, 278, 115581. [Google Scholar] [CrossRef]
- Li, X.; Dong, C.; Jiang, W.; Wu, X. Distributed control strategy for global economic operation and bus restorations in a hybrid AC/DC microgrid with interconnected subgrids. Int. J. Electr. Power Energy Syst. 2021, 131, 107032. [Google Scholar] [CrossRef]
- Battistelli, C.; Agalgaonkar, Y.P.; Pal, B.C. Probabilistic Dispatch of Remote Hybrid Microgrids Including Battery Storage and Load Management. IEEE Trans. Smart Grid 2017, 8, 1305–1317. [Google Scholar] [CrossRef]
- Mahmoodi, M.; Shamsi, P.; Fahimi, B. Economic Dispatch of a Hybrid Microgrid with Distributed Energy Storage. IEEE Trans. Smart Grid 2015, 6, 2607–2614. [Google Scholar] [CrossRef]
- Qiu, H.; Gu, W.; You, F. Bilayer Distributed Optimization for Robust Microgrid Dispatch with Coupled Individual-Collective Profits. IEEE Trans. Sustain. Energy 2021, 12, 1525–1538. [Google Scholar] [CrossRef]
- Sadighmanesh, A.; Sabahi, M.; Zavvari, M. Probabilistic dispatch in hybrid-microgrid system with considering energy arbitrage. J. Renew. Sustain. Energy 2019, 11, 25904. [Google Scholar] [CrossRef]
- Shi, R.; Li, S.; Sun, C.; Lee, K.Y. Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles. Energies 2018, 11, 2050. [Google Scholar] [CrossRef] [Green Version]
- Surender Reddy, S.; Park, J.Y.; Jung, C.M. Optimal operation of microgrid using hybrid differential evolution and harmony search algorithm. Front. Energy 2016, 10, 355–362. [Google Scholar] [CrossRef]
- Ramya, K.T.Y. Discretionary controller for hybrid energy storage system based on orderly control considering commercial value in decentralised microgrid operation. COMPEL—Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 1969–1980. [Google Scholar]
- Wang, T.; He, X.; Deng, T. Neural networks for power management optimal strategy in hybrid microgrid. Neural Comput. Appl. 2017, 31, 2635–2647. [Google Scholar] [CrossRef]
- Wu, H.; Zhuang, H.; Zhang, W.; Ding, M. Optimal allocation of microgrid considering economic dispatch based on hybrid weighted bilevel planning method and algorithm improvement. Int. J. Electr. Power Energy Syst. 2016, 75, 28–37. [Google Scholar] [CrossRef]
- Jiang, K.; Wu, F.; Zong, X.; Shi, L.; Lin, K. Distributed Dynamic Economic Dispatch of an Isolated AC/DC Hybrid Microgrid Based on a Finite-Step Consensus Algorithm. Energies 2019, 12, 4637. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Yue, D.; Dou, C.; Zhang, H. Multiagent System-Based Integrated Design of Security Control and Economic Dispatch for Interconnected Microgrid Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2101–2112. [Google Scholar] [CrossRef]
- Jin, X.; Mu, Y.; Jia, H.; Wu, J.; Jiang, T.; Yu, X. Dynamic economic dispatch of a hybrid energy microgrid considering building based virtual energy storage system. Appl. Energy 2017, 194, 386–398. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; Li, Z.; Xu, X. Two-Layer Control Scheme for Maintaining the Frequency and the Optimal Economic Operation of Hybrid AC/DC Microgrids. IEEE Trans. Power Syst. 2019, 34, 64–75. [Google Scholar] [CrossRef]
- Clarke, W.C.; Brear, M.J.; Manzie, C. Control of an isolated microgrid using hierarchical economic model predictive control. Appl. Energy 2020, 280, 115960. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, Z.; Liu, Y.; Wang, H.; Tai, N.; Jiang, X. Optimal Control of Microgrid Operation Based on Fuzzy Sliding Mode Droop Control. Energies 2019, 12, 3600. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wang, X.; Wang, S. Research on Frequency Control of Islanded Microgrid with Multiple Distributed Power Sources. Processes 2020, 8, 193. [Google Scholar] [CrossRef] [Green Version]
- Zheng, S.; Liao, K.; Yang, J.; He, Z.; Sun, X. A novel bilayer coordinated control scheme for global autonomous economic operation of islanded hybrid AC/DC microgrids. IET Renew. Power Deneration 2021, 15, 2726–2739. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; Li, Z.; Che, L.; Alabdulwahab, A.; Abusorrah, A. Compartmentalization Strategy for the Optimal Economic Operation of a Hybrid AC/DC Microgrid. IEEE Trans. Power Syst. 2020, 35, 1294–1304. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subnet | DG i | |||
|---|---|---|---|---|
| AC Subnet | DG1 | 4.60 × 10−2 | 1.20 × 10−2 | 0.25 |
| DG2 | 4.20 × 10−2 | 0.6.0 × 10−2 | 0.27 | |
| DG3 | 3.60 × 10−2 | 3.80 × 10−2 | 0.32 | |
| DC Subnet | DG1 | 5.60 × 10−2 | 5.60 × 10−2 | 0.21 |
| DG2 | 4.80 × 10−2 | 4.50 × 10−2 | 0.36 | |
| DG3 | 3.20 × 10−2 | 4.80 × 10−2 | 0.20 |
| Subnet | Parameter | Symbols | Values |
|---|---|---|---|
| AC Subnet | Rated power | 50 HZ | |
| Line impedance | 0.5 Ω, 1.5 mH | ||
| AC DG capacity | 15 KW | ||
| AC load | 80 + j20 (kVA) | ||
| DC Subnet | Rated voltage | 220 V | |
| Line impedance | 1 Ω | ||
| DC DG capacity | 15 KW | ||
| DC load | 100 (kVA) |
| Parameter | Values |
|---|---|
| 0.01/0.001 | |
| 0.2 | |
| 0.5/2.0 | |
| 0.1/2.0 | |
| 0.01 | |
| 1/10 | |
| 0.005/0.2 | |
| 0.001/0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Li, W.; Yue, Y.; Zhao, H. Distributed Economic Control for AC/DC Hybrid Microgrid. Electronics 2022, 11, 13. https://doi.org/10.3390/electronics11010013
Wang H, Li W, Yue Y, Zhao H. Distributed Economic Control for AC/DC Hybrid Microgrid. Electronics. 2022; 11(1):13. https://doi.org/10.3390/electronics11010013
Chicago/Turabian StyleWang, Hongjun, Wanfeng Li, Youjun Yue, and Hui Zhao. 2022. "Distributed Economic Control for AC/DC Hybrid Microgrid" Electronics 11, no. 1: 13. https://doi.org/10.3390/electronics11010013
APA StyleWang, H., Li, W., Yue, Y., & Zhao, H. (2022). Distributed Economic Control for AC/DC Hybrid Microgrid. Electronics, 11(1), 13. https://doi.org/10.3390/electronics11010013