
A Bayesian Optimization Approach for Multi-Function Estimation for Environmental Monitoring Using an Autonomous Surface Vehicle: Ypacarai Lake Case Study

 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
- A generalized multi-parameter measuring system for environmental monitoring based on Bayesian optimization with acquisition function fusions.
- An experimental study of data sampling distance between measurements using kernel hyper-parameters information.
- A validation and comparison with other approaches in a real-case scenario such as the monitoring of Ypacarai Lake in Paraguay.
2. Related Works
2.1. Environmental Monitoring with Autonomous Vehicles
2.2. Multi-Objective Optimization
3. Statement of the Problem
3.1. Objective Functions
3.2. Assumptions
- Environment: The environment consists of a defined region modelled as a matrix . The matrix corresponds to the square grid representation of real-life locations (latitude, longitude). Therefore, the real environment is discrete, meaning that an ASV can be located in a position related to an element of the map. Every element is a square of side d, and this can be navigable or occupied by an impassable object (such as terrain or obstacles). The full set of navigable elements or squares corresponds to :If element is navigable, it is considered a part of the water body and has measurable properties (set ). Therefore, all navigable locations in the set are available for reading, meaning that there exists a water quality map for each studied water quality parameter. The water quality values of each map on location are considered time invariant, i.e., they remain constant through the simulations. All maps of water quality parameters follow the main characteristic of the central distribution theorem, implying that the expected mean is zero and the standard deviation is one. However, the values are not necessarily normally distributed around the center of the Lake. Another important assumption implies that the behaviors of water quality parameters are smooth and continuous, mainly due to fluid dynamics and surface wave propagation properties [5]. Figure 2 shows an example of Ypacarai Lake modelled as matrix , as determined with a procedure found in [22]. This model gives the characteristic of being non-convex; i.e., not all segments made with two different locations and can be divided into segments that contain only elements of .
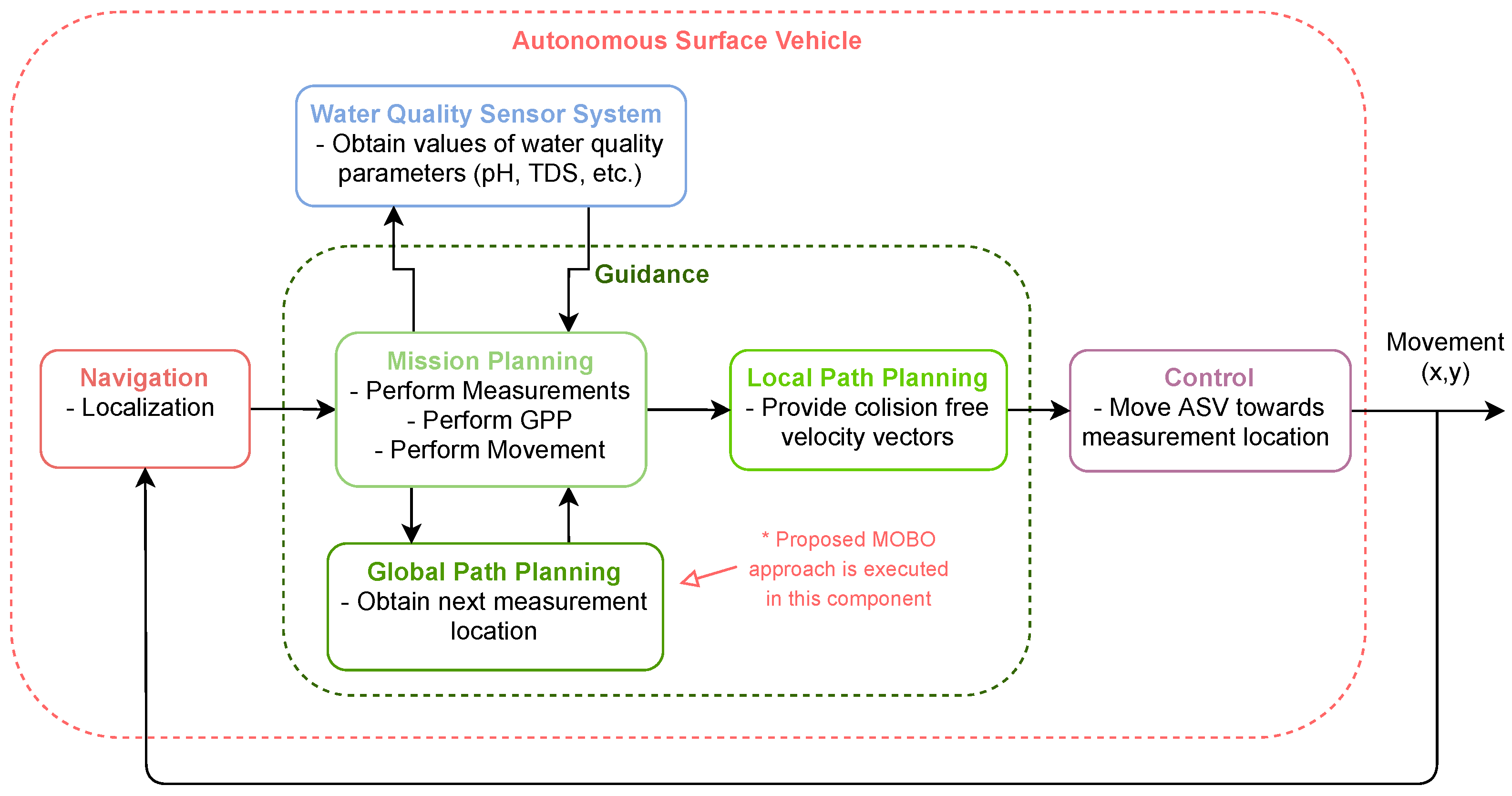
- Navigation, Guidance, and Control (NGC) System: The ASV has subsystems that are designed for specific purposes of navigation, guidance, and control. Figure 3 depicts the general system design. The ASV contains the NGC system so that it can autonomously position, decide missions, and move for accomplishing the objective. The navigation subsystem is in charge of locating the vehicle; however, the positioning system is not perfect and can provide the position of the ASV within a circle of radius r. This positioning error leads to guidance inaccuracies. The guidance subsystem is in charge of planning paths. Once a goal is defined using a global path planner (GPP) component, which implements the MEBO approach, this subsystem defines a collision-free path from the current position of the ASV to the goal location. If no obstacles are in the segment, a direct route is planned; otherwise, the guidance system plans a path using RRT*, as it can provide quick, good paths as shown in [23]. Finally, the control subsystem is in charge of reaching the calculated goal, but as the navigation subsystem has an error of , the measurement position may be shifted by . This error also accounts for water and air currents, stopping mechanisms, etc.
- Water Quality Sensor System: The vehicle is supposedly equipped with n water quality sensors named . It can be observed in Figure 3 that the ASV communicates the water quality sensor system to the mission planning component through the guidance system. The guidance system commands the performing of measurements, and the sensor system provides the values of water quality parameters. These sensors can measure different variables simultaneously, but the ASV needs to stop to take measurements. This constraint prevents continuous monitoring; i.e., the vehicle cannot be constantly obtaining new information. As shown in Equation (4), the sensors do not perform perfect measurements; therefore, noise is present in every read. For real purposes, the values returned by the sensors are not normally distributed (, ); therefore, additional data pre-processing is needed to ensure that the values that are fed to the MEBO system will have the mentioned characteristics. Preprocessing data is a common procedure in machine learning, and it is used in this work to facilitate the fitting of Gaussian process models with means of zero.
- ASV constraints: The ASV has a smaller size than the size d of a square of matrix so that a movement in every direction is always possible. For performance evaluation purposes, the battery autonomy is taken into account. In order to include battery usage, one approach is to consider its level as a function constraint, but since the battery level is independent of the position p of the vehicle (i.e., the input in the proposed MEBO approach), this constraint cannot be approximated to a function of . Therefore, methods to include the battery level directly in the BO method as a constraint, such as the work in [17], cannot be used. Consequently, in this work, as in a related work [5], we consider that missions finalize whenever the ASV travels a total distance of 15,000 m, which corresponds to approximately h of usage.
4. Proposed Approach
4.1. Bayesian Optimization
4.2. Gaussian Processes
4.3. Acquisition Function
4.4. Multi-Function Estimation Generalization
4.4.1. AF Fusion
- Decoupled Evaluation: This is designed to optimize one single GP at a time, so that different objectives are optimized in different steps. The expression responds to select the next measurement position as the argument of the maximum of the different AFs (Equation (15)). For example, if all the AFs weight the different locations of set according to the uncertainty , the measurement location will correspond to the position where one of the AFs has the highest value of uncertainty. The decoupled method expression is shown below:
- Coupled Evaluation: This is a fusion that acknowledges the importance values of all the AFs. Therefore, the AFs contribute equally to a general or grand AF. It consists of adding all the AFs. Thus, the next measurement location is calculated as the argument of the maximum of the sum of the AFs, as shown in Equation (16). This location will be selected as the location where the different AFs will have their values maximized as a combined set.
4.4.2. Multi-Function Truncated Adaptation
5. Performance Evaluation
5.1. Performance Metrics
5.2. Simulation Setup
5.2.1. Ground Truth and Water Quality Parameters
5.2.2. Simulation Parameters
5.3. Results for AFF and Length Ratio of Truncated Adaptation Selection
5.3.1. Acquisition Functions Fusion Evaluation
5.3.2. Ratio of Length Scale for Truncated-AF
5.4. Comparison with Other Methods
- PESMOC for Environmental Monitoring:In this work, we use the method proposed in [17] but with some modifications in order to ensure monitoring. This consists of obtaining the difference between the logarithm of the uncertainty of a predictive distribution (PD) and the average of logarithms of uncertainties of conditioned PD (conditioned to ). is one of the m different locations of a supposed Pareto Set. For the full explanation of the PESMOC, please refer to [17]. The PES expression is directly taken from the work, and it has the form of:As shown in the expression above, the coupled evaluation sums up the differences for each AF. The decoupled version considers one difference at a time. Next, we define the parameters that were changed in order to fit the purpose of exploration:
- Pareto Set : Since the objective of this work can be thought of as minimizing uncertainty, the Pareto Set is taken as the positions where the sum of the predicted standard deviations reaches their maximum values.
- Conditioning : The conditioning is made through a cloned GP model in order to include a supposed evaluation according to the items of the Pareto Set.
- Monte Carlo Sampling M: For efficient evaluations, only one point of the Pareto Set is used. Therefore, the number of Monte Carlo samples is reduced to one. Indeed, this sacrifices accuracy but definitely improves computational efficiency, which has been observed as being less efficient than our method due to the fact that it needs to calculate the GP regression twice for each water quality parameter or objective.
With , as foretold, we proceed to test the method using the same GP model and the same simulation sensors as the proposed method evaluation, but with the best parameters, and coupled AFF. - TSP-Based Environmental Monitoring:In [16], a set of 60 waypoints were defined in the shore of Ypacarai Lake. Afterwards, the best TSP solution (waypoint visiting order) was found by a GA evolved to optimize exploration of the Ypacarai Lake. Due to the fact that the GA can be trapped in local minimum [28], we randomize the starting waypoint so that the ASV does not start always on the same initial position. Contrary to the continuous measuring approach stated by the mentioned work [16], for comparison, the monitoring system is modified so that the vehicle can perform measurements only while the ASV is not moving. For this method, the proposed system in Figure 3 is the same, with the difference of the global path Planning component.The distance between measurements locations is the same as the one proposed in this work, length scale-based. Therefore, the ASV travels from waypoint to waypoint performing measurements every meters. Whenever the total distance traveled reaches 15,000 m, the ASV stops and performs a last measurement, and the mission ends.
5.5. Discussion
- The proposed MEBO system can efficiently select measurement locations online (i.e., with streaming data) so that multiple surrogate models can be obtained simultaneously. It is notable how the system provides efficient sequential measuring locations taking into account the available information.
- We evaluated two different fusion methods of AF, namely, the decoupled evaluation and the coupled evaluation. The latter proved to be better whenever the number of measurements were sufficient for good R2S values.
- Through simulations, empirical foundations of optimal measurement performing for efficient exploring were laid out. We propose that exploration of unknown functions take into account the underlying hyper-parameters of GPs, such as the length scale. The simulations showed that, similar to the Nyquist–Shannon sampling theorem, the distance between measurement locations for surrogate model acquisition needd to be shorter than half of a supposed frequency of similarity between different locations (namely, length scale ℓ).
- With an appropriate value of , comparisons with other methods were carried out. Our proposed MEBO approach outperforms the other approaches in terms of R2S obtained versus distance and number of measurements, being better than the PESMOC implementation and better than the GA method. The MEBO approach is also more robust than the other methods and provides better variance of R2S values. Moreover, the proposed system also outperforms the others whenever the data is noisy, obtaining a improvement versus PESMOC and a versus GA.
- Computational efficiency comparisons also showed that the proposed method is better than other BO approaches and similar to adapted water quality environmental approaches.
6. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- González, E.J.; Roldán, G. Eutrophication and phytoplankton: Some generalities from lakes and reservoirs of the Americas. In Microalgae—From Physiology to Application; IntechOpen: Rijeka, Croatia, 2019. [Google Scholar]
- Henao, E.; Cantera, J.R.; Rzymski, P. Conserving the Amazon River Basin: The case study of the Yahuarcaca Lakes System in Colombia. Sci. Total Environ. 2020, 724, 138186. [Google Scholar] [CrossRef] [PubMed]
- Arzamendia, M.; Gregor, D.; Reina, D.G.; Toral, S.L. An evolutionary approach to constrained path planning of an autonomous surface vehicle for maximizing the covered area of Ypacarai Lake. Soft Comput. 2019, 23, 1723–1734. [Google Scholar] [CrossRef]
- Luis, S.Y.; Reina, D.G.; Marín, S.L.T. A deep reinforcement learning approach for the patrolling problem of water resources through autonomous surface vehicles: The ypacarai lake case. IEEE Access 2020, 8, 204076–204093. [Google Scholar] [CrossRef]
- Peralta, F.; Reina, D.G.; Marín, S.L.T.; Arzamendia, M.; Gregor, D.O. A bayesian optimization approach for water resources monitoring through an autonomous surface vehicle: The ypacarai lake case study. IEEE Access 2021, 9, 9163–9179. [Google Scholar] [CrossRef]
- Sánchez-García, J.; García-Campos, J.; Arzamendia, M.; Reina, D.G.; Toral, S.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Jorge, V.A.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.; Dos Santos, D.H.; Gonçalves, L.M.; Amory, A.M. A survey on unmanned surface vehicles for disaster robotics: Main challenges and directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [PubMed]
- Yang, Q.; Jang, S.J.; Yoo, S.J. Q-learning-based fuzzy logic for multi-objective routing algorithm in flying ad hoc networks. Wirel. Pers. Commun. 2020, 113, 115–138. [Google Scholar] [CrossRef]
- Angley, D.; Ristic, B.; Moran, W.; Himed, B. Search for targets in a risky environment using multi-objective optimisation. IET Radar Sonar Navig. 2018, 13, 123–127. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P.; Nutanong, S. Multi-Objective Optimization for Drone Delivery. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Kilic, K.I.; Gemikonakli, O.; Mostarda, L. Multi-objective Priority Based Heuristic Optimization for Region Coverage with UAVs. In International Conference on Advanced Information Networking and Applications; Springer: Berlin, Germany, 2020; pp. 768–779. [Google Scholar]
- Gosiewski, Z.; Kwaśniewski, K. Time Minimization of Rescue Action Realized by an Autonomous Vehicle. Electronics 2020, 9, 2099. [Google Scholar] [CrossRef]
- Ju, C.; Son, H.I. Multiple UAV systems for agricultural applications: Control, implementation, and evaluation. Electronics 2018, 7, 162. [Google Scholar] [CrossRef]
- Luis, S.Y.; Reina, D.G.; Marín, S.L.T. A Multiagent Deep Reinforcement Learning Approach for Path Planning in Autonomous Surface Vehicles: The YpacaraC-Lake Patrolling Case. IEEE Access 2021, 9, 17084–17099. [Google Scholar] [CrossRef]
- Arzamendia, M.; Espartza, I.; Reina, D.G.; Toral, S.; Gregor, D. Comparison of eulerian and hamiltonian circuits for evolutionary-based path planning of an autonomous surface vehicle for monitoring ypacarai lake. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 1495–1507. [Google Scholar] [CrossRef]
- Arzamendia, M.; Gutierrez, D.; Toral, S.; Gregor, D.; Asimakopoulou, E.; Bessis, N. Intelligent online learning strategy for an autonomous surface vehicle in lake environments using evolutionary computation. IEEE Intell. Transp. Syst. Mag. 2019, 11, 110–125. [Google Scholar] [CrossRef]
- Garrido-Merchán, E.C.; Hernández-Lobato, D. Predictive entropy search for multi-objective bayesian optimization with constraints. Neurocomputing 2019, 361, 50–68. [Google Scholar] [CrossRef]
- Torun, H.M.; Swaminathan, M.; Davis, A.K.; Bellaredj, M.L.F. A global Bayesian optimization algorithm and its application to integrated system design. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2018, 26, 792–802. [Google Scholar] [CrossRef]
- Gao, J.; Zeng, L.; Cao, C.; Ye, W.; Zhang, X. Multi-objective optimization for sensor placement against suddenly released contaminant in air duct system. In Building Simulation; Springer: Berlin, Germany, 2018; Volume 11, pp. 139–153. [Google Scholar]
- Pourshahabi, S.; Nikoo, M.R.; Raei, E.; Adamowski, J.F. An entropy-based approach to fuzzy multi-objective optimization of reservoir water quality monitoring networks considering uncertainties. Water Resour. Manag. 2018, 32, 4425–4443. [Google Scholar] [CrossRef]
- Reina, D.; Tawfik, H.; Toral, S. Multi-subpopulation evolutionary algorithms for coverage deployment of UAV-networks. Ad Hoc Netw. 2018, 68, 16–32. [Google Scholar] [CrossRef]
- Peralta, F.; Arzamendia, M.; Gregor, D.; Cikel, K.; Santacruz, M.; Reina, D.G.; Toral, S. Development of a simulator for the study of path planning of an autonomous surface vehicle in lake environments. In Proceedings of the 2019 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Valparaiso, Chile, 13–27 November 2019; pp. 1–6. [Google Scholar]
- Peralta, F.; Arzamendia, M.; Gregor, D.; Reina, D.G.; Toral, S. A comparison of local path planning techniques of autonomous surface vehicles for monitoring applications: The ypacarai lake case-study. Sensors 2020, 20, 1488. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, C.E. Gaussian processes in machine learning. In Summer School on Machine Learning; Springer: Berlin, Germany, 2003; pp. 63–71. [Google Scholar]
- Archetti, F.; Candelieri, A. Bayesian Optimization and Data Science; Springer: Berlin, Germany, 2019. [Google Scholar]
- Morere, P.; Marchant, R.; Ramos, F. Sequential Bayesian optimization as a POMDP for environment monitoring with UAVs. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6381–6388. [Google Scholar]
- Oliveira, R.; Ott, L.; Guizilini, V.; Ramos, F. Bayesian optimisation for safe navigation under localisation uncertainty. In Robotics Research; Springer: Berlin, Germany, 2020; pp. 489–504. [Google Scholar]
- Wei, Z.; Li, X.; Xu, L.; Cheng, Y. Comparative study of computational intelligence approaches for NOx reduction of coal-fired boiler. Energy 2013, 55, 683–692. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Specific Objective | Is MO? | Main Algorithm | Vehicle | Year |
|---|---|---|---|---|---|
| [9] | Search for targets in risky environments | Yes | Pareto-front point selection | Aerial | 2018 |
| [13] | Agricultural field coverage | No | Distributed swarm control | Aerial | 2018 |
| [10] | Package delivery pptimization | Yes | -constraint method | Aerial | 2019 |
| [3] | Pure exploration | No | TSP and genetic algorithm | ASV | 2019 |
| [16] | Exploration and intensification | No | Hamiltonian and Eulerian circuits | ASV | 2019 |
| [8] | Routing algorithms for Comms. | Yes | Q-learning fuzzy logic | Aerial | 2020 |
| [12] | Time-efficient path planning | No | Genetic algorithm | - | 2020 |
| [4] | Monitoring through patrolling | No | Double deep Q-learning | ASV | 2020 |
| [11] | Wireless network coverage | Yes | Simulated annealing | Aerial | 2020 |
| [5] | Monitoring and model obtaining | No | Bayesian optimization | ASV | 2021 |
| [14] | Multi-agent monitoring | No | Double deep Q-learning | ASV | 2021 |
| Sim. ID | Sensors Involved |
|---|---|
| 1 | () |
| 2 | () |
| 3 | () |
| 4 | () |
| 5 | () |
| 6 | () |
| 7 | () |
| 8 | () |
| Gaussian Processes | Acq. Functions | Adaptation | AFF |
|---|---|---|---|
| RBF () | EI () | tr- () | coupled or decoupled |
| Average R2S | Quantity of Meas. | Average Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.5 | 0.375 | 0.25 | 0.5 | 0.375 | 0.25 | 0.5 | 0.375 | 0.25 | |
| 0.301 | 0.355 | 0.409 | 7 | 9 | 12 | 1.021 | 1.131 | 1.435 | |
| 10,000 | 0.542 | 0.589 | 0.614 | 12 | 15 | 21 | 1.443 | 1.811 | 2.746 |
| 15,000 | 0.693 | 0.734 | 0.754 | 17 | 22 | 32 | 2.063 | 2.799 | 4.736 |
| Parameter | Value |
|---|---|
| Gaussian Processes | RBF () |
| Acq. Functions | EI () |
| Adaptation | tr- () |
| AFF | coupled |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peralta, F.; Reina, D.G.; Toral, S.; Arzamendia, M.; Gregor, D. A Bayesian Optimization Approach for Multi-Function Estimation for Environmental Monitoring Using an Autonomous Surface Vehicle: Ypacarai Lake Case Study. Electronics 2021, 10, 963. https://doi.org/10.3390/electronics10080963
Peralta F, Reina DG, Toral S, Arzamendia M, Gregor D. A Bayesian Optimization Approach for Multi-Function Estimation for Environmental Monitoring Using an Autonomous Surface Vehicle: Ypacarai Lake Case Study. Electronics. 2021; 10(8):963. https://doi.org/10.3390/electronics10080963
Chicago/Turabian StylePeralta, Federico, Daniel Gutierrez Reina, Sergio Toral, Mario Arzamendia, and Derlis Gregor. 2021. "A Bayesian Optimization Approach for Multi-Function Estimation for Environmental Monitoring Using an Autonomous Surface Vehicle: Ypacarai Lake Case Study" Electronics 10, no. 8: 963. https://doi.org/10.3390/electronics10080963
APA StylePeralta, F., Reina, D. G., Toral, S., Arzamendia, M., & Gregor, D. (2021). A Bayesian Optimization Approach for Multi-Function Estimation for Environmental Monitoring Using an Autonomous Surface Vehicle: Ypacarai Lake Case Study. Electronics, 10(8), 963. https://doi.org/10.3390/electronics10080963