
Double-Threshold Segmentation of Panicle and Clustering Adaptive Density Estimation for Mature Rice Plants Based on 3D Point Cloud



Abstract
1. Introduction
2. Materials and Methods
2.1. LiDAR Measurement System and Point-Cloud-Data Acquisition
2.1.1. LiDAR Measurement System
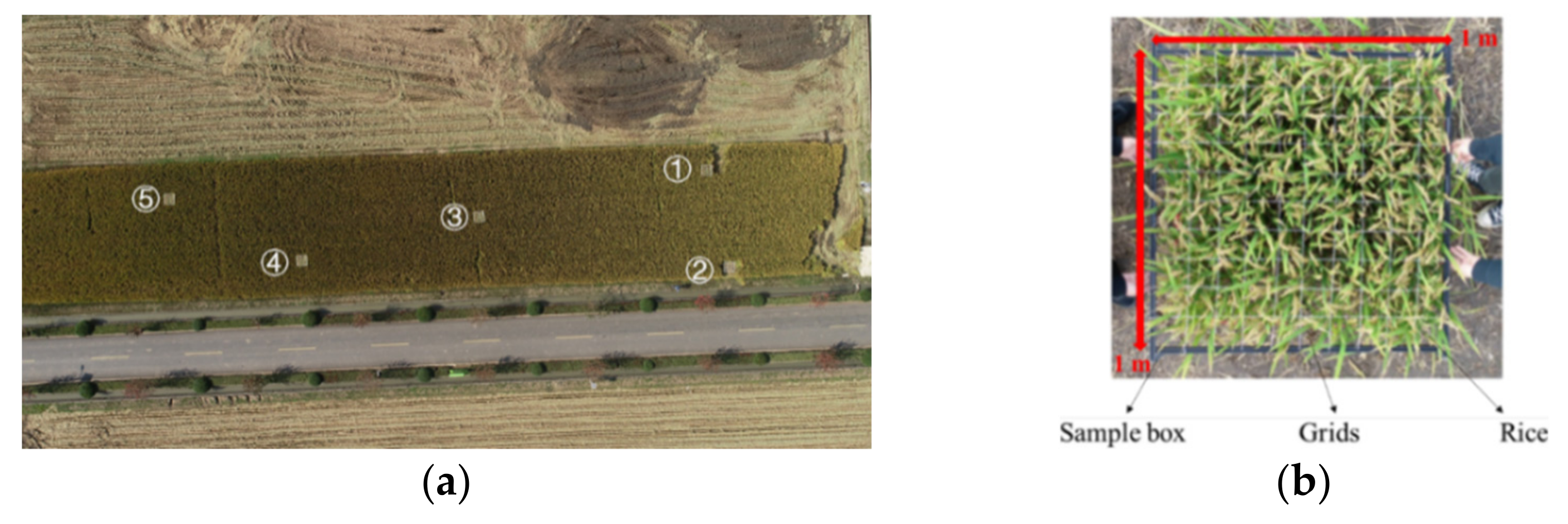
2.1.2. Point-Cloud-Data Acquisition
2.2. Segmentation of Clumping Mature Rice Panicle with Double-Threshold
2.2.1. Noise Reduction
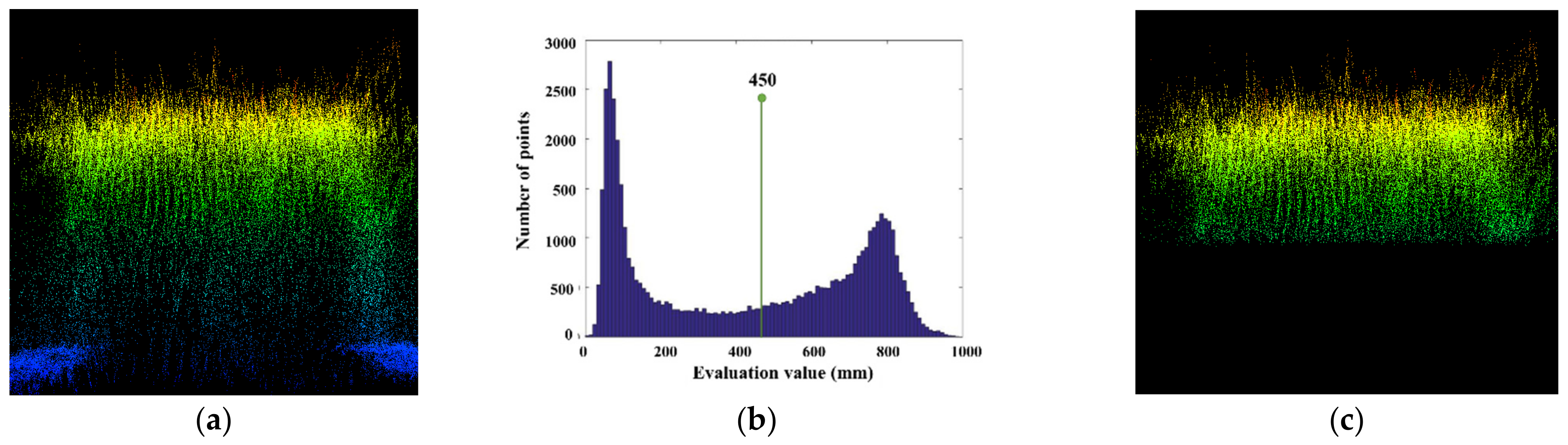
2.2.2. Segmentation for Point-Cloud Data of Panicle
2.3. Clustering Adaptive-Parameter Adjustment and Rice-Density Estimation
2.3.1. Rice-Density Estimation: Supervoxel Clustering Method
2.3.2. Rice-Density Estimation: Mean-Shift Clustering Method
3. Results and Discussion
3.1. Adaptive-Parameter Adjustment Model
3.2. Noise Reduction and Double-Threshold Segmentation
3.3. Rice-Density Estimation
4. Conclusions
- (1)
- The 3D cloud point data of the rice in the field were obtained by the established LiDAR measurement system, of which the noise points far away from the target body were effectively reduced through SOR algorithm. The accurate segmentation of mature rice panicle was realized according to the elevation and reflection intensity value of the point-cloud data based on Otsu. This method could be valuable for technical reference of the similar crops segmentation, such as wheat and millet.
- (2)
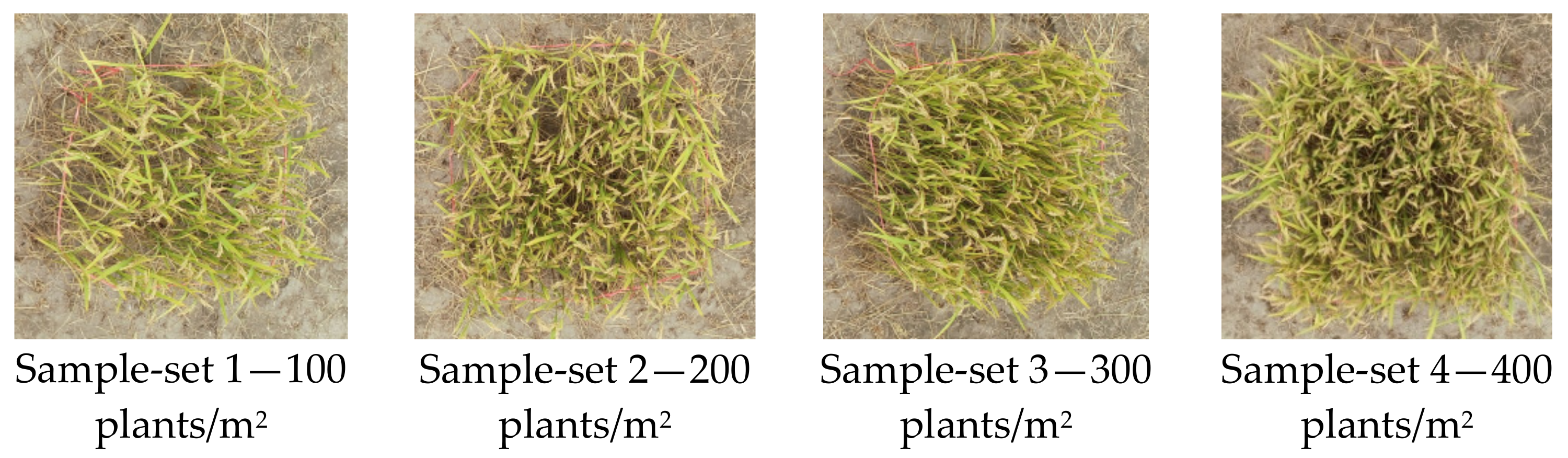
- In order to better investigate the influence between the seed-point distance and the kernel bandwidth with regard to the number of points in the total panicle point cloud, respectively, when using supervoxel clustering and mean-shift clustering, the rice samples with different densities were set manually as a standard experiment group. The models were then obtained, which could be beneficial for adaptively adjusting parameters when estimating crop density.
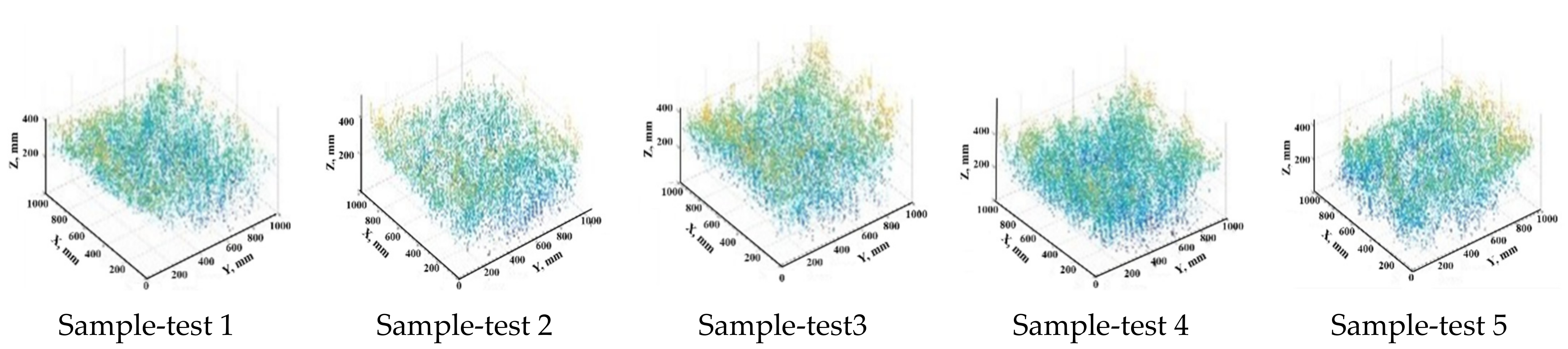
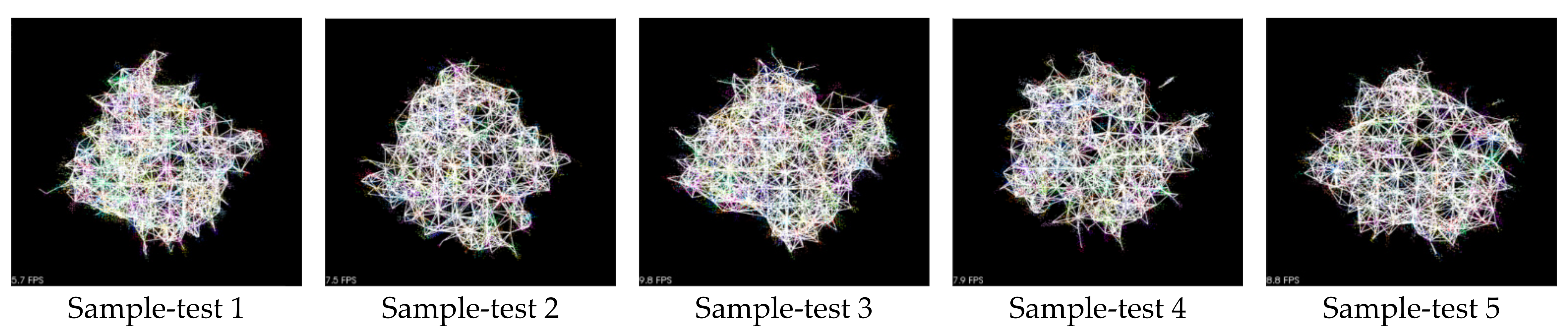
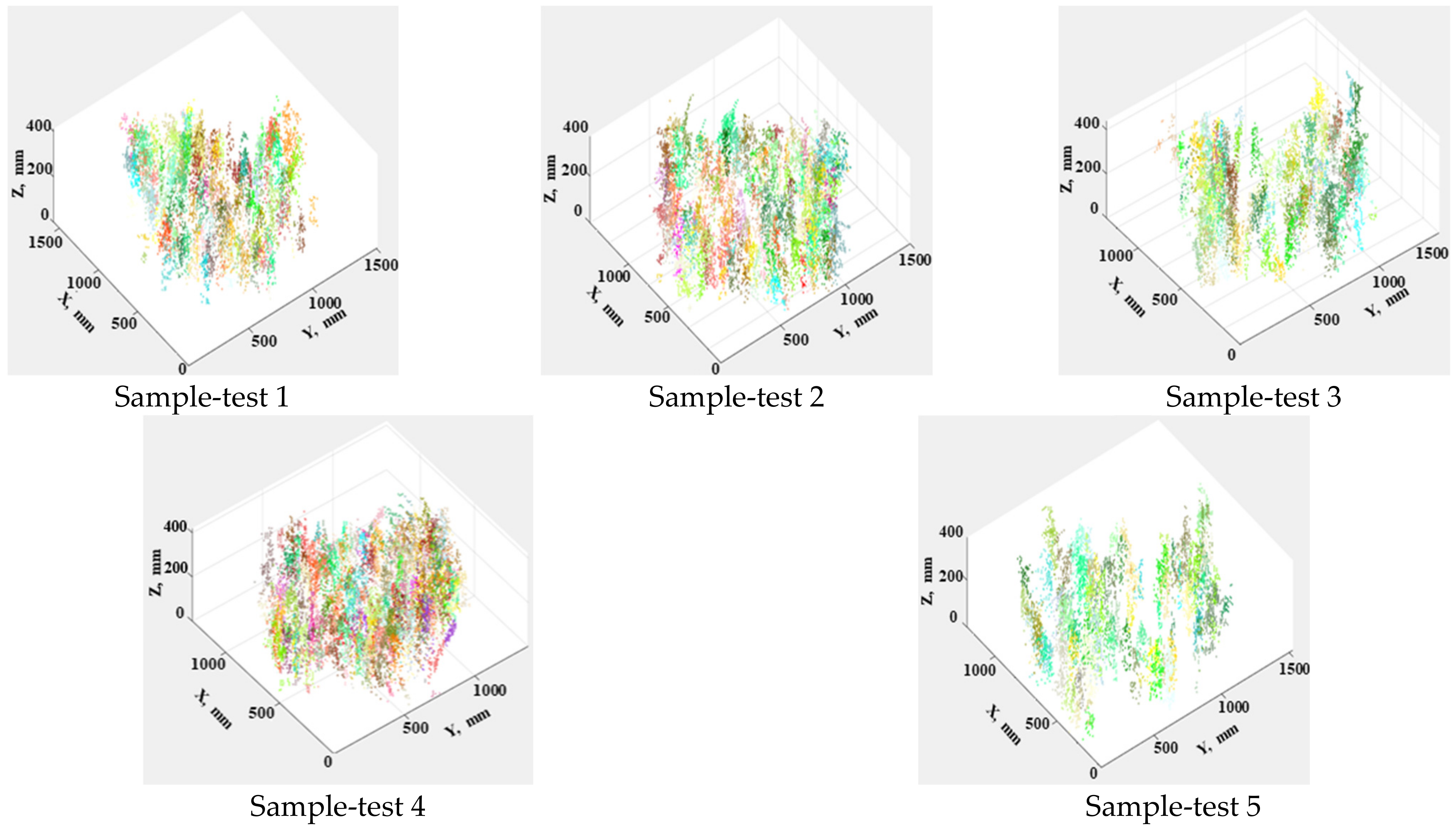
- (3)
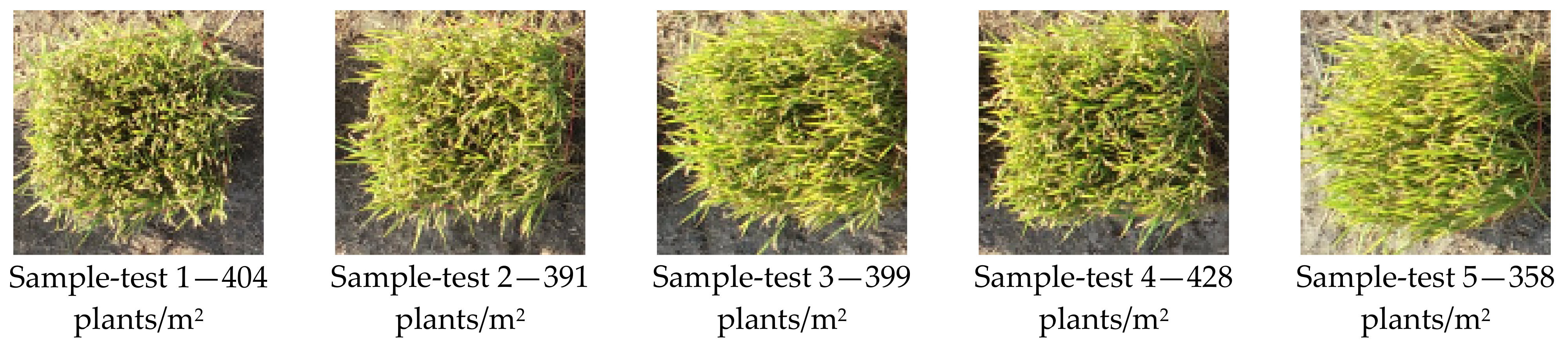
- The random experiment group with random density samples was established, and the measurement tests proved the proposed methods for crop-density estimation feasible based on the double-threshold segmentation method. The best results were obtained with the mean-shift clustering, resulting in an RMSE of 9.968 and a MAPE of 3.37%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bietresato, M.; Carabin, G.; Vidoni, R.; Gasparetto, A.; Mazzetto, F. Evaluation of a LiDAR-based 3D-stereoscopic vision system for crop-monitoring applications. Comput. Electron. Agri. 2016, 124, 1–13. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R. High throughput determination of plant height, ground cover, and above-ground biomass in wheat with LiDAR. Front. Plant Sci. 2018, 2018, 9. [Google Scholar] [CrossRef]
- Chai, X.Y.; Xu, L.Z.; Li, Y.; Qiu, J.; Li, Y.M.; Lv, L.Y.; Zhu, Y.H. Development and experimental analysis of a fuzzy grey control system on rapeseed cleaning loss. Electronics 2000, 9, 1764. [Google Scholar] [CrossRef]
- Chai, X.Y.; Zhou, Y.; Xu, L.; Li, Y.; Li, Y.M.; Lv, L.Y. Effect of guide strips on the distribution of threshed outputs and cleaning losses for a tangential-longitudinal flow rice combine harvester. Biosyst. Eng. 2000, 198, 223–234. [Google Scholar] [CrossRef]
- Taylor, R.K.; Hobby, H.M.; Schrock, M.D. Evaluation of an Automatic Feedrate Control System for a Grain Combine. In 2005 ASAE Annual Meeting; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2005; pp. 17–20. [Google Scholar]
- Long, D.S.; McCallum, J.D. On-combine, multi-sensor data collection for post-harvest assessment of environmental stress in wheat. Precis. Agric. 2015, 16, 492–504. [Google Scholar] [CrossRef]
- Pan, J.; Shao, L.; Wang, K. Detection method on feed density for rice combine. TCSAE 2010, 26, 113–116. [Google Scholar]
- Homburg, H. Method and Apparatus for the Measurement of Plant Density for the Control of Harvest Machines. U.S. Patent No. 4228636, 22 April 1980. [Google Scholar]
- Ehlert, D.; Hammen, V.; Adamek, R. On-line Sensor Pendulum-Meter for determination of Plant Mass. Precis. Agric. 2003, 4, 1573–1618. [Google Scholar] [CrossRef]
- Sudduth, K.A.; Birrell, S.J.; Krumpelman, M.J. Field evaluation of a corn population sensor. In Proceedings of the 5th International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000. [Google Scholar]
- Maertens, K.; Reyns, P.; De Clippel, J.; De Baerdemaeker, J. First experiments on ultrasonic crop density measurement. J. Sound Vib. 2003, 266, 655–665. [Google Scholar] [CrossRef]
- Maldaner, L.F.; Corrêdo, L.D.P.; Canata, T.F.; Molin, J.P. Predicting the sugarcane yield in real-time by harvester engine parameters and machine learning approaches. Comput. Electron. Agric. 2021, 181, 105945. [Google Scholar] [CrossRef]
- Destain, M.; Vrindts, E.; Reyniers, M.; Darius, P.; Baerdemaeker, J.; Gilot, M.; Sadaoui, Y.; Frankinet, M.; Hanquet, B. Analysis of soil and crop properties for precision agriculture for winter wheat. Biosyst. Eng. 2003, 85, 141–152. [Google Scholar]
- Behnke, W.; Baumgarten, J. Method and Apparatus for Ascertaining the Quantity of a Crop Harvested in a Combine. U.S. Patent No. 7362233, 22 April 2008. [Google Scholar]
- Yang, Y.; Udupa, J.K.; Lin, Y.; Sang, N.; Nyul, L.G.; Tong, H. Crop detection and density estimation combing LiDAR points cloud with remote sensing image. In Proceedings of the MIPPR 2009: Multispectral Image Acquisition and Processing, Yichang, China, 30 October–1 November 2009. [Google Scholar]
- Jin, S.; Su, Y.J.; Gao, S.; Wu, F.F.; Ma, Q.; Xu, K.X.; Hu, T.; Liu, J.; Pang, S.; Guan, H.; et al. Separating the structural components of maize for field phenotyping using terrestrial LiDAR data and deep convolutional neural networks. IEEE Trans. Geosci. Remote 2019, 58, 2644–2658. [Google Scholar] [CrossRef]
- Saeys, W.; Lenaerts, B.; Craessaerts, G.; De Baerdemaeker, J. Estimation of the crop density of small grains using LiDAR sensors. Biosyst. Eng. 2009, 102, 22–30. [Google Scholar] [CrossRef]
- Phan, A.T.T.; Takahashi, K.; Rikimaru, A.; Higuchi, Y. Method for estimating rice plant height without ground surface detection using laser scanner measurement. J. Appl. Remote Sens. 2016, 10, 046018. [Google Scholar] [CrossRef]
- Christiansen, M.P.; Laursen, M.S.; Jørgensen, R.N.; Skovsen, S.; Gislum, R. Ground vehicle mapping of fields using LiDAR to enable prediction of crop biomass. arXiv 2018, arXiv:1805.01426. [Google Scholar]
- Hosoi, F.; Omasa, K. Estimation of vertical plant area density profiles in a rice canopy at different growth stages by high-resolution portable scanning lidar with a lightweight mirror. ISPRS J. Photogramm. 2012, 74, 11–19. [Google Scholar] [CrossRef]
- Velumani, K.; Elberink, S.O.; Yang, M.Y.; Baret, F. Wheat ear detection in plots by segmenting mobile laser dacnner data. In Proceedings of the ISPRS Geospatial Week, Wuhan, China, 18–22 September 2017. [Google Scholar]
- Zhang, L.; Grift, T.E. A LiDAR-based crop height measurement system for miscanthus giganteus. Comput. Electron. Agri. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Dhami, H.; Yu, K.; Xu, T.; Zhu, Q.; Dhakal, K.; Friel, J.; Li, S.; Tokekar, P. Crop height and plot estimation from unmanned aerial vehicles using 3D LiDAR. arXiv 2019, arXiv:1910.14031. [Google Scholar]
- Dimitrievski, M.; Veelaert, P.; Philips, W. Semantically aware multilateral filter for depth upsampling in automotive LiDAR point clouds. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Wei, H.; He, L.; Jie, L. Data processing of airborne Lidar point cloud based on the edge detection filtering algorithm. For. Eng. 2013, 29, 17–20. [Google Scholar] [CrossRef]
- Gang, C. Digital terrain model extraction from airborne LiDAR data in complex mining area. In Proceedings of the 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010. [Google Scholar]
- Qin, J.X. Improved algorithm of building point cloud segmentation based on Otsu. Geospat. Inform. 2014, 12, 110–113. [Google Scholar] [CrossRef]
- Ban, Z.; Chen, Z.; Liu, J. Supervoxel Segmentation with Voxel-Related Gaussian Mixture Model. Sensors 2018, 18, 128. [Google Scholar]
- Reza, M.N.; Na, I.S.; Sun, W.B.; Kyeong-Hwan, L. Rice yield estimation based on K-means clustering with graph-cut segmentation using low-altitude UAV images. Biosyst. Eng. 2018, 177, 109–121. [Google Scholar] [CrossRef]
- Han-Ya, I.; Ishii, K.; Noguchi, N. Rice yields and rrotein content estimation by low-altitude remote sensing using spectroradiometer. IFAC Proc. Vol. 2011, 44, 1796–1801. [Google Scholar] [CrossRef]
- Li, M.; Bi, X.; Wang, L. A method of two-stage clustering learning based on improved DBSCAN and density peak algorithm. Comput. Commun. 2021, 167, 75–84. [Google Scholar] [CrossRef]
- Melzer, T. Non-parametric segmentation of ALS point clouds using mean shift. J. Appl. Geod. 2007, 1, 159–170. [Google Scholar] [CrossRef]
- Blanquart, J.E.; Sirignano, E.; Lenaerts, B.; Saeys, W. Online crop height and density estimation in grain fields using LiDAR. Biosyst. Eng. 2020, 198, 1–14. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Target | Parameter | Performance Target | Parameter |
|---|---|---|---|
| Number of laser lines | 16 | Horizontal angle resolution/° | 0.1–0.4 |
| Range/mm | <100 | Frequency/Hz | 5–20 |
| Accuracy/cm | ±3 | Working voltage/V | 9–32 |
| Vertical angle resolution/° | 2 | Weight/g | 830 |
| Horizontal measurement angle range/° | 360 | Dimensions/mm | 103×72 |
| Wavelength/nm | 903 | Power/W | 8 |
| Laser beam size/mm | 9.5 × 12.7 | Divergence angle/mrad | 3.0 |
| Performance Target | Parameter |
|---|---|
| Output frequency of IMU/Hz | 200 |
| Output frequency of GNSS/Hz | 20 |
| Course accuracy/ | 0.05 |
| Elevation angle and roll accuracy/° | 0.015 |
| Input voltage/V | 10–30 |
| Number | Mark | Voxel Size (mm) | Seed-Point Spacing (mm) | Number of Point Clouds in Point Cloud | Actual Results, Plants/m2 | Clustering Results, Plants/m2 |
|---|---|---|---|---|---|---|
| Sample-set 1 | a | 20 | 200 | 11,310 | 100 | 105 |
| b | 20 | 190 | 12,780 | 97 | ||
| c | 20 | 210 | 12,309 | 108 | ||
| Sample-set 2 | a | 20 | 160 | 15,451 | 200 | 207 |
| b | 20 | 160 | 17,460 | 205 | ||
| c | 20 | 170 | 16,997 | 194 | ||
| Sample-set 3 | a | 20 | 140 | 18,633 | 300 | 311 |
| b | 20 | 130 | 21,055 | 323 | ||
| c | 20 | 140 | 21,152 | 307 | ||
| Sample-set 4 | a | 20 | 120 | 26,780 | 400 | 381 |
| b | 20 | 110 | 30,261 | 396 | ||
| c | 20 | 110 | 30,138 | 405 |
| Number | Mark | Kernel Bandwidth (mm) | Number of Points Clouds in Point Cloud | Actual Results, Plant/m2 | Clustering Result, Plants/m2 |
|---|---|---|---|---|---|
| Sample-set 1 | a | 45 | 11,310 | 100 | 96 |
| b | 44 | 12,780 | 104 | ||
| c | 45 | 12,309 | 98 | ||
| Sample-set 2 | a | 38 | 15,451 | 200 | 193 |
| b | 38 | 17,460 | 191 | ||
| c | 40 | 16,997 | 189 | ||
| Sample-set 3 | a | 33 | 18,633 | 300 | 287 |
| b | 33 | 21,055 | 292 | ||
| c | 32 | 21,152 | 310 | ||
| Sample-set 4 | A | 30 | 26,780 | 400 | 392 |
| B | 30 | 30,261 | 412 | ||
| C | 29 | 30,138 | 415 |
| Number | Mark | Actual Result, Plants/m2 | Supervoxel Clustering Result, Plants/m2 | Mean-Shift Clustering Result, Plants/m2 |
|---|---|---|---|---|
| Sample-test 1 | a | 404 | 437 | 406 |
| b | 421 | 409 | ||
| c | 410 | 401 | ||
| Sample-test 2 | a | 393 | 393 | 396 |
| b | 399 | 402 | ||
| c | 403 | 403 | ||
| Sample-test 3 | a | 365 | 345 | 387 |
| b | 367 | 382 | ||
| c | 372 | 408 | ||
| Sample-test 4 | a | 402 | 402 | 410 |
| b | 405 | 415 | ||
| c | 439 | 412 | ||
| Sample-test 5 | a | 333 | 333 | 332 |
| b | 331 | 328 | ||
| c | 327 | 341 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Luo, Y.; Chai, X.; Zhang, P.; Zhang, Q.; Xu, L.; Wei, L. Double-Threshold Segmentation of Panicle and Clustering Adaptive Density Estimation for Mature Rice Plants Based on 3D Point Cloud. Electronics 2021, 10, 872. https://doi.org/10.3390/electronics10070872
Sun Y, Luo Y, Chai X, Zhang P, Zhang Q, Xu L, Wei L. Double-Threshold Segmentation of Panicle and Clustering Adaptive Density Estimation for Mature Rice Plants Based on 3D Point Cloud. Electronics. 2021; 10(7):872. https://doi.org/10.3390/electronics10070872
Chicago/Turabian StyleSun, Yixin, Yusen Luo, Xiaoyu Chai, Pengpeng Zhang, Qian Zhang, Lizhang Xu, and Lele Wei. 2021. "Double-Threshold Segmentation of Panicle and Clustering Adaptive Density Estimation for Mature Rice Plants Based on 3D Point Cloud" Electronics 10, no. 7: 872. https://doi.org/10.3390/electronics10070872
APA StyleSun, Y., Luo, Y., Chai, X., Zhang, P., Zhang, Q., Xu, L., & Wei, L. (2021). Double-Threshold Segmentation of Panicle and Clustering Adaptive Density Estimation for Mature Rice Plants Based on 3D Point Cloud. Electronics, 10(7), 872. https://doi.org/10.3390/electronics10070872