
Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics



Abstract
1. Introduction
2. Materials and Methods
2.1. Preprocessing
2.1.1. Data Structure
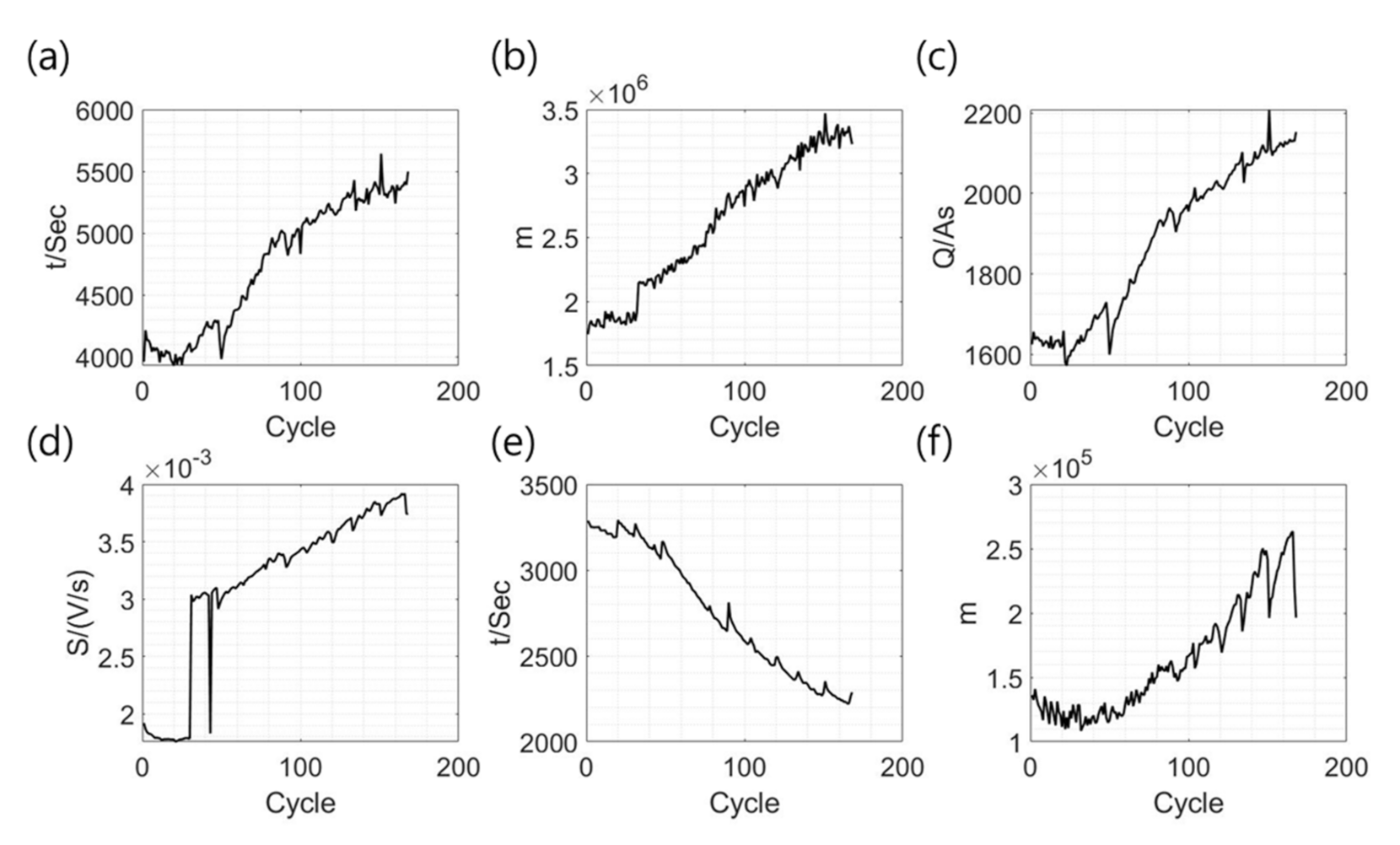
2.1.2. Feature Extraction
2.2. Proposed DNNs for Capacity Fade and RUL Prediction
2.3. Data-Based PF for Comparison
3. Results
3.1. Feature Extraction for Capacity Fade and RUL Prediction
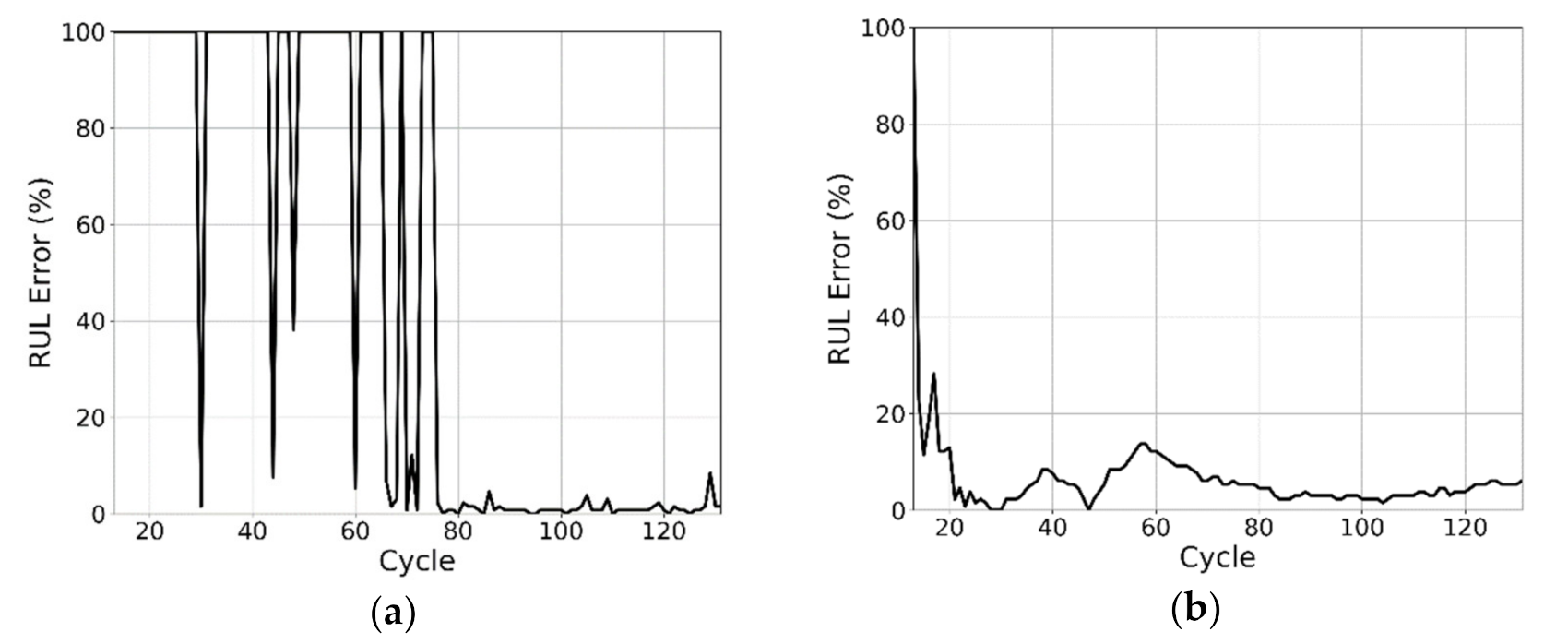
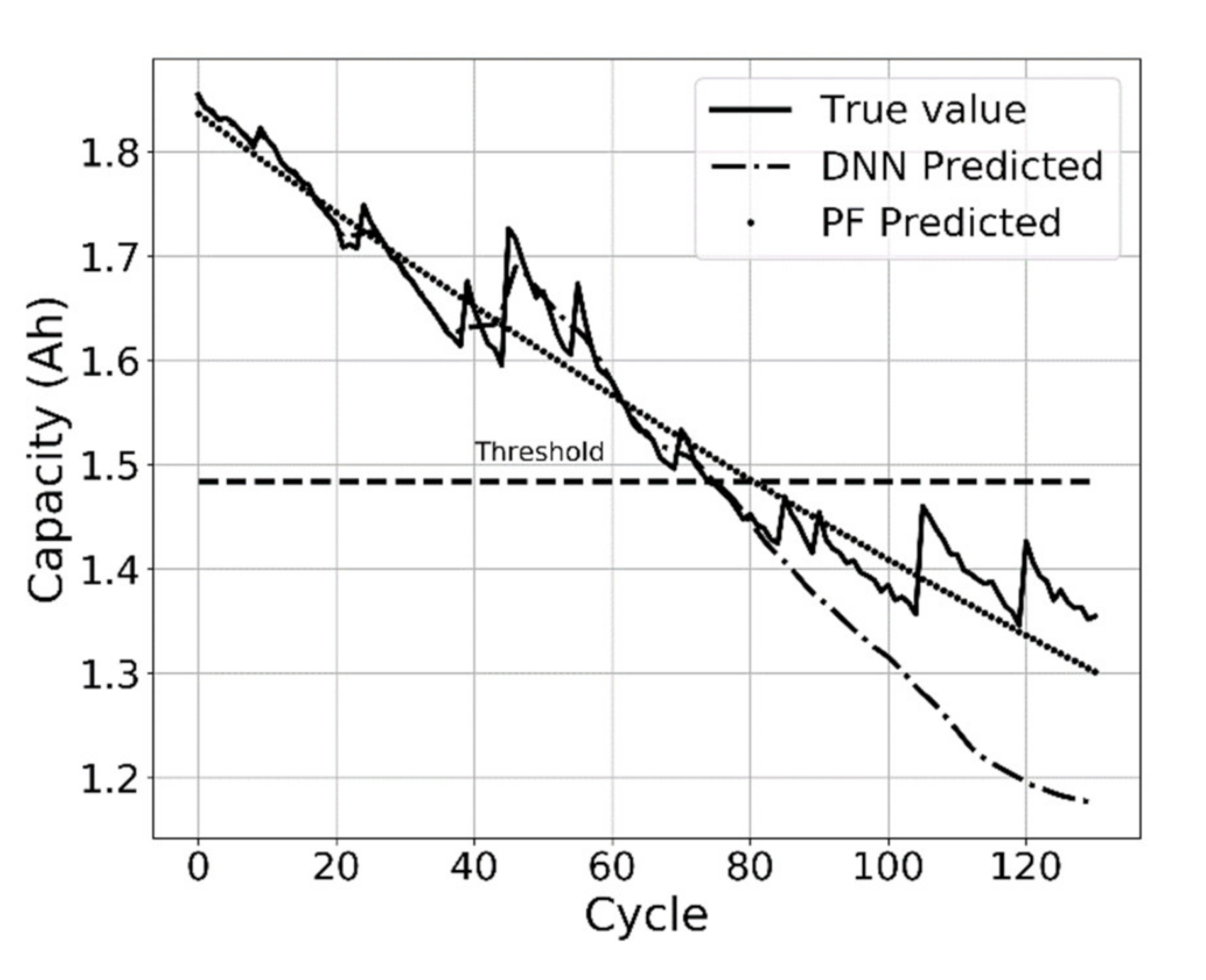
3.2. Prediction of Capacity Fade and RUL Using DNNs
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Doridant, A.; Abouda, K.; Givelin, P.; Thibaud, B. Battery Management System Demonstrator Board design using EMC System simulation. In Proceedings of the 2019 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Barcelona, Spain, 2–6 September 2019; pp. 427–432. [Google Scholar]
- Aiello, O.; Crovetti, P.S.; Fiori, F. Susceptibility to EMI of a Battery Management System IC for electric vehicles. In Proceedings of the 2015 IEEE International Symposium on Electromagnetic Compatibility (EMC), Dresden, Germany, 16–22 August 2015; pp. 749–754. [Google Scholar]
- Zhang, D.; Cadet, C.; Yousfi-Steiner, N.; Druart, F.; Bérenguer, C. PHM-oriented degradation indicators for batteries and fuel cells. Fuel Cells 2017, 2, 268–276. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Kailong, L.; Kang, L.; Qiao, P.; Cheng, Z. A brief review on key technologies in the battery management system of electric vehicles. Front. Mech. Eng. 2019, 14, 47–64. [Google Scholar]
- Sisodia, A.; Monteiro, J. Lithium-ion battery management system: A lifecycle evaluation model for the use in the development of electric vehicles. Int. Conf. Res. Mech. Eng. Sci. 2018, 144, 4020. [Google Scholar] [CrossRef]
- Vichare, N.; Pecht, M. Prognostics and health management of electronics. IEEE Trans. Compon. Packag. Technol. 2006, 29, 222–229. [Google Scholar] [CrossRef]
- Liu, Z.; Jia, Z.; Vong, C.-M.; Han, J.; Yan, C.; Pecht, M. A Patent Analysis of Prognostics and Health Management (PHM) Innovations for Electrical Systems. IEEE Access 2018, 6, 18088–18107. [Google Scholar] [CrossRef]
- Xia, T.; Dong, Y.; Xiao, L.; Du, S.; Pan, P.; Xi, L. Recent advances in prognostics and health man-agement for advanced manufacturing paradigms. Reliab. Eng. Syst. Saf. 2018, 178, 255–268. [Google Scholar] [CrossRef]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef]
- Yoon, C.-O.; Moon, E.-A.; Jonghoon, K.; Kim, K.-H. Lifetime Prediction and Internal Parameter Analysis of Lithium-Ion Cell for Spacecraft Application. J. Adv. Eng. Technol. 2017, 10, 17–22. [Google Scholar] [CrossRef]
- Vasebi, A.; Bathaee, S.; Partovibakhsh, M. Predicting state of charge of lead-acid batteries for hybrid electric vehicles by extended Kalman filter. Energy Convers. Manag. 2008, 49, 75–82. [Google Scholar] [CrossRef]
- Sim, S.H.; Gang, J.H.; An, D.; Kim, S.I.; Kim, J.Y.; Choi, J.H. Remaining Useful Life Prediction of Li-Ion Battery Based on Charge Voltage Characteristics. Trans. Korean Soc. Mech. Eng. B 2013, 37, 313–322. [Google Scholar] [CrossRef]
- Choi, Y.; Kim, H. Prognostics and Health Management for Battery Remaining Useful Life Prediction Based on Electrochemistry Model: A Tutorial. J. Korean Inst. Commun. Inf. Sci. 2017, 42, 939–949. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Battery Data Set, NASA Ames Prognostics Data Repository; NASA Ames: Moffett Field, CA, USA, 2007. Available online: http://ti.arc.nasa.gov/project/prognostic-datarepository (accessed on 15 March 2019).
- Xia, T.; Song, Y.; Zheng, Y.; Pan, E.; Xi, L. An ensemble framework based on convolutional bi-directional LSTM with multiple time windows for remaining useful life estimation. Comput. Ind. 2020, 115, 103182. [Google Scholar] [CrossRef]
- Aiello, O. Electromagnetic Susceptibility of Battery Management Systems’ ICs for Electric Vehicles: Experimental Study. Electron. 2020, 9, 510. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Lim, S.W.; Jeong, U.H.; Lim, H.W. Study on failure prediction method of BLDC motor driver. J. Adv. Eng. Technol. 2016, 9, 105–109. [Google Scholar]
- Meng, H.; Li, Y.-F. A review on prognostics and health management (PHM) methods of lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 116, 109405. [Google Scholar] [CrossRef]
- Bian, X.; Wei, Z.; He, J.; Yan, F.; Liu, L. A Novel Model-based Voltage Construction Method for Robust State-of-health Estimation of Lithium-ion Batteries. IEEE Trans. Ind. Electron. 2020, 1. [Google Scholar] [CrossRef]
- He, J.; Wei, Z.; Bian, X.; Yan, F. State-of-Health Estimation of Lithium-Ion Batteries Using Incremental Capacity Analysis Based on Voltage–Capacity Model. IEEE Trans. Transp. Electrif. 2020, 6, 417–426. [Google Scholar] [CrossRef]
- Mansour-Saatloo, A.; Moradzadeh, A.; Mohammadi-Ivatloo, B.; Ahmadian, A.; Elkamel, A. Machine Learning Based PEVs Load Extraction and Analysis. Electron. 2020, 9, 1150. [Google Scholar] [CrossRef]
- Zhang, L.; Lin, J.; Liu, B.; Zhang, Z.; Yan, X.; Wei, M. A Review on Deep Learning Applications in Prognostics and Health Management. Ieee Access 2019, 7, 162415–162438. [Google Scholar] [CrossRef]
- Lu, C.; Tao, L.; Fan, H. Li-ion battery capacity estimation: A geometrical approach. J. Power Sources 2014, 261, 141–147. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster–Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Walker, E.; Rayman, S.; White, R.E. Comparison of a particle filter and other state estimation methods for prognostics of lith-ium-ion batteries. J. Power Sources 2015, 287, 1–12. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Feature | Process |
|---|---|---|
| 1 | Length of constant voltage section | Charge |
| 2 | Area under constant voltage section | Charge |
| 3 | Maximum radius of curvature in constant voltage section | Charge |
| 4 | Maximum slope of initial voltage curve | Discharge |
| 5 | Length of voltage range above 3 V | Discharge |
| 6 | Maximum radius of curvature in voltage curve | Discharge |
| 7 | Discharging time | |
| 8 | Charging time | |
| 9 | Test temperature | |
| 10 | Discharging voltage | |
| 11 | Discharging current |
| Root Mean-Squared Error of Capacity Predictions | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Battery Excluded from Training | Training Error (×10−5) | TestError (×10−2) | B0005 (×10−5) | B0006 (×10−4) | B0007 (×10−5) | B0018 (×10−5) | B0029 (×10−4) | B0030 (×10−4) | B0031 (×10−4) | B0032 (×10−4) |
| B0005 | 5.97 | 0.344 | 369 | 3.10 | 6.54 | 2.07 | 2.45 | 1.13 | 0.813 | 2.29 |
| B0006 | 3.32 | 0.258 | 4.78 | 28.8 | 4.59 | 3.67 | 5.97 | 3.15 | 1.51 | 4.00 |
| B0007 | 2.76 | 5.09 | 19.1 | 8.30 | 5380 | 13.4 | 6.11 | 2.91 | 2.12 | 5.97 |
| B0018 | 9.02 | 0.0107 | 5.90 | 2.44 | 5.82 | 10.9 | 3.10 | 2.10 | 1.21 | 3.90 |
| B0029 | 2.78 | 1.69 | 1.69 | 2.01 | 4.50 | 6.96 | 144 | 1.63 | 1.62 | 1.57 |
| B0030 | 3.56 | 0.054 | 16.0 | 2.48 | 1.39 | 3.52 | 1.71 | 4.95 | 1.70 | 1.85 |
| B0031 | 3.99 | 21.1 | 2.59 | 1.03 | 6.38 | 2.62 | 3.17 | 2.47 | 2050 | 3.52 |
| B0032 | 5.20 | 22.9 | 16.4 | 5.04 | 9.25 | 8.83 | 8.74 | 6.14 | 2.58 | 2240 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-J.; Kim, B.-K.; Kwon, M.-K.; Nam, K.; Kang, S.-W. Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics. Electronics 2021, 10, 846. https://doi.org/10.3390/electronics10070846
Lee C-J, Kim B-K, Kwon M-K, Nam K, Kang S-W. Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics. Electronics. 2021; 10(7):846. https://doi.org/10.3390/electronics10070846
Chicago/Turabian StyleLee, Chul-Jun, Bo-Kyong Kim, Mi-Kyeong Kwon, Kanghyun Nam, and Seok-Won Kang. 2021. "Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics" Electronics 10, no. 7: 846. https://doi.org/10.3390/electronics10070846
APA StyleLee, C.-J., Kim, B.-K., Kwon, M.-K., Nam, K., & Kang, S.-W. (2021). Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics. Electronics, 10(7), 846. https://doi.org/10.3390/electronics10070846