1. Introduction
The quickly growing and evolving Internet of Things (IoT) market is having a very positive impact on everyday life experience. The IoT can be applied in many scenarios, such as smart homes, healthcare, agriculture and manufacturing automation, infrastructure monitoring, etc. However, the tremendous numbers of devices involved in the Internet of Things bring new challenges to wireless networking. In such scenarios, high numbers of stations increase the contention for the channel and, consequently, frame losses, delays and power consumption.
Wi-Fi HaLow [
1], an extension of Wi-Fi technology to the IoT, proposes several mechanisms to reduce power consumption, such as the Target Wake Time (TWT) and Restricted Access Window (RAW) mechanisms. With TWT, stations switch between doze and awake states according to a predefined schedule and spend energy on the radio channel transmission to listen only during the awake state [
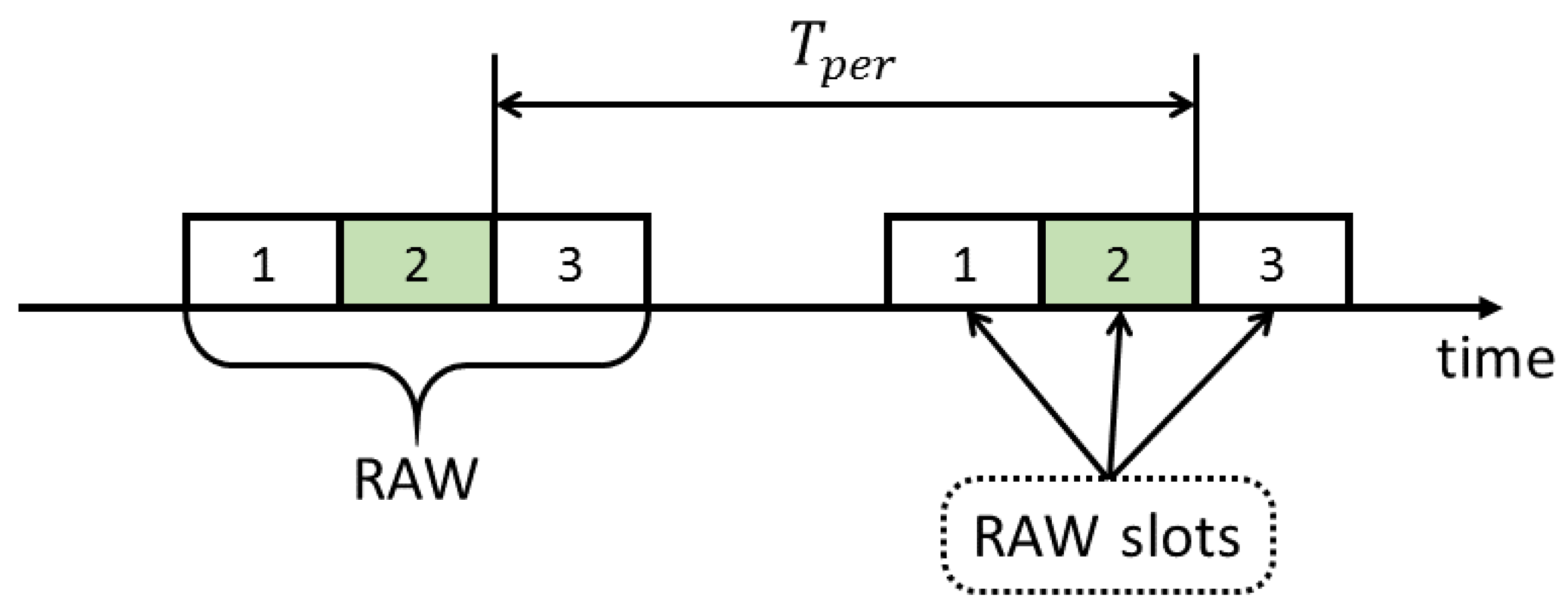
2]. With the RAW mechanism, an access point defines time intervals called Restricted Access Windows (RAWs), during which only a predefined group of stations can transmit data, while others are forbidden to access the channel. The RAW is further divided into one or several RAW slots; in each RAW slot, only a subset of the original group is allowed to access the channel. If stations do not need to transmit data outside their RAW slots, an access point or the stations may schedule TWT awake states according to RAW slot timings to allow stations to save energy by sleeping outside of the allocated RAW slot. Moreover, the RAW mechanism reduces the contention for the channel by (i) limiting the number of stations simultaneously accessing the channel and (ii) spreading their transmission attempts over time. By reducing the contention for the channel, the RAW mechanism essentially decreases the number of retransmissions and consequently the power consumption [
3].
Within a RAW slot, data frames are transmitted using the Enhanced Distributed Channel Access (EDCA) mechanism, which is based on the Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) method. One of the peculiarities of the RAW mechanism is that stations reset the backoff state machine at the beginning of the RAW slot. In particular, the contention window is reset to the minimal size
. When a station has a data frame for uplink transmission in a RAW slot, the station generates an initial value for the backoff counter as a random integer number that is uniformly distributed in the interval
. The station listens for the channel and decrements the backoff counter every time when the channel is idle for the interval
. If the channel is busy, the station waits until other stations finish their transmission attempts and also decreases the backoff counter. Once the backoff counter reaches zero, the station makes a transmission attempt. If the transmission fails, the station doubles the contention window size and makes a retry after another backoff delay. The frame is dropped after
failed transmission attempts. Note that the standard distinguishes (i) a queue retry counter that is a part of the backoff function and affects the contention window size and (ii) a frame retry counter that is assigned to each frame and triggers a frame drop once it reaches the retry limit [
4]. Unlike the contention window and queue retry counter, the frame retry counter is not reset at the beginning of the RAW slot and, if the station does not transmit outside the RAW, the frame retry counter saves its state between consecutive allocated RAW slots. The data frame transmission might be preceded by a Request-to-Send/Clear-to-Send (RTS/CTS) handshake to set up the transmission opportunity and avoid possible collisions of long data frames. However, as we consider short data frames, we do not consider the RTS/CTS mechanism. The IEEE 802.11ah standard also allows the access point to enable or disable crossing the RAW slot boundary [
5]. We consider the default setting with the ability to cross slot boundaries disabled; i.e., the station cannot start the data frame transmission in the RAW slot if this transmission ends after the end of the allocated RAW slot.
The IEEE 802.11ah standard does not describe how to choose the parameters of RAW, and it is a difficult problem to choose these parameters according to specific needs. The RAW mechanism has already been widely investigated, for example, in [
6,
7,
8,
9,
10,
11,
12,
13,
14], but the majority of the related analytical studies either do not pay attention to the peculiarities of the RAW mechanism or have high computational complexity. In this paper, we study the usage of periodic RAW mechanisms for short RAW slots. The periodicity of the RAW allows information about the parameters of the RAW mechanism to be sent only at the RAW establishment time, which relieves the channel from resending additional information in beacons. Short RAW slots are quasi-optimal for unsaturated traffic, as we have proven in [
3], and lead to a low-complexity analytical model as shown in [
15]. However, unlike [
15], in this paper, we take into account the delivery of all data frames, not only the first event of the delivery. More precisely, the contribution of our paper is twofold:
We develop a simple analytical model of the periodic RAW in the scenario with unsaturated uplink traffic, short RAW slots, and the requirement to deliver frames from every station promptly and with low power consumption. The model is validated with a simulation.
We apply the developed analytical model for the minimization of the consumed channel timeshare under restrictions to the average delay and power consumption.
The rest of the paper is organized as follows. Firstly, in
Section 2, we review previous analytical works about the RAW mechanism. In
Section 3, we provide a detailed description of the scenario under consideration. Furthermore, in
Section 4 and
Section 5, we develop the analytical model of the periodic RAW with short slots, validate the model and apply it to optimize RAW parameters. Finally, in
Section 6, we present our conclusions.
2. Related Works
The RAW mechanism has attracted significant attention from the research community since the appearance of a draft of the IEEE 802.11ah standard. Early works on the analytical study of the RAW mechanism [
6,
7,
11] typically modeled the RAW mechanism using an extension of the Bianchi model [
16] with an incorporated finite length of the RAW slot. However, in these papers, the authors researched the Group-Synchronized Distributed Coordination Function (GS-DCF) mechanism, where the backoff state is saved between consequent RAWs, which is not the case in the final version of the IEEE 802.11ah standard.
To model the RAW mechanism more accurately, one needs to consider both the finite length of the RAW slot and the backoff function state reset at the beginning of the RAW slot. One of the approaches to take into account these peculiarities is to investigate transient processes in discrete-time Markov chains [
3,
17,
18]. However, this approach has an overly high computational complexity. Another approach is to extend the Markov chain used in the Bianchi model with additional states that allow attention to be paid to these peculiarities [
12]. However, the authors of [
12] assumed that the collision probability is the same for all data frame retransmission attempts, which affects the model accuracy because the contention changes significantly during the RAW slot.
To reduce the computational complexity and build a simple yet accurate model, in the paper, we focus on short RAW slots instead of the general case. A short RAW slot is a RAW slot with a length that is enough for at most one transmission attempt. It has already been shown that short RAW slots are quasi-optimal for unsaturated traffic [
3] and allow the building of low-complexity analytical models [
15]. In [
15], we used a short RAW slot-based approach to target the shortest delay for the first data frame out of all delivered frames; i.e., only the first data frame delivery was important in the context of [
15]. In this paper, we extend the approach in [
15] to build an analytical model that targets the average delay of all data frames; i.e., the delivery of all data frames is important in our paper.
3. Scenario
We consider a set of
N sensors that measure the environmental parameters and report them to the access point. All sensors are in the transmission range of the other sensors. For each sensor, the measurement events are modeled as a Poisson flow with intensity
. Since sensors are typically cheap and simple, we consider that their buffers store only one data frame that corresponds to the last measurement. If the sensor does not manage to deliver the measurement before a new one appears, it simply replaces the out-of-date measurement data with the recent update. All data frames are of the same size and transmitted at the same rate. To protect sensors from contention for the channel with other stations and reduce the energy consumption of the sensors, an access point is set up with a periodic RAW with
M RAW slots, assigning each RAW slot to a subset of sensors and scheduling TWT awake intervals according to the allocated RAW slots (see
Figure 1). We consider short RAW slots within the periodic RAW, i.e., RAW slots with a length that is enough for at most one transmission attempt. Inside the RAW slot, sensors use the EDCA mechanism to access the channel. When the RAW slot ends, sensors switch to the doze state.
We define the delivery delay as the time from the moment when the sensor queue becomes non-empty due to being filled with measurement data until the delivery of the measurement data to the access point. We also define the channel resource consumption as the proportion of channel time occupied by a periodic RAW. To use the RAW mechanism efficiently—i.e., to transmit data frames with minimal delay and energy consumption and not spend too much channel time—we need to properly choose parameters such as the RAW period , the length of the RAW slot , the number M of RAW slots within a RAW and the initial size of the contention window . In the paper, we develop an analytical model that allows the values of these channel access method parameters that minimize the channel time consumption for a given number of sensors and traffic intensity to be found, satisfying the restrictions on the average delivery delay and power consumption.
4. Analytical Model
To solve the problem stated above, we develop an analytical model of data transmission inside the periodic RAW. In the model, adopting an approach from [
16], we consider the time intervals between consecutive changes of stations’ backoff counters, which were called “virtual slots” in [
19]. A successful virtual slot is a virtual slot in which only one transmission attempt occurs. As we do not consider channel noise, this attempt is always successful. A collision virtual slot is a virtual slot containing more than one transmission attempt made by different stations. An empty virtual slot does not contain any transmission attempts. The lengths of successful, collision and empty virtual slots are
respectively. We assume that the RTS/CTS collision avoidance mechanism is not used; i.e.,
.
We consider the RAW of length , which consists of M RAW slots, each of length . The channel time consumption of the periodic RAW is . We denote the number of stations allocated to the mth RAW slot as ; obviously, . Since stations generate packets independently of each other and stations transmit independently in different RAW slots, we can consider each RAW slot separately. Thus, we first build a model for a single RAW slot and then expand it to consider the full RAW.
4.1. Single RAW Slot
We consider the transmission process within a single RAW slot
m with
allocated stations. We consider short RAW slots that can contain at most one transmission attempt; i.e., at most one successful or collision virtual slot. Defining
K as the maximal number of empty virtual slots that precede a transmission in the RAW slot, we can parameterize the RAW slot duration
as
We define
n as the number of active stations, i.e., stations with a non-empty queue. As previously mentioned, a station with a non-empty queue generates an initial value for the backoff counter as a random integer that is uniformly distributed within the interval
, counts down the backoff counter, and transmits once the backoff counter reaches zero. This means that
n active stations have in total
cases corresponding to different sets of backoff counter values. We also define
as the number of empty virtual slots in the RAW slot before a collision or successful transmission in the
st virtual slot. The probability of a successful transmission within the RAW slot is
where
n is the number of ways to choose a transmitting station in the
st virtual slot and
is the number of cases for backoff counter values of all other stations. Similarly, the collision probability can be found to be
The probability that there is no attempt to transmit in the RAW slot and thus that the RAW slot is empty can be found to be
The next step is to consider the transmission process in the
mth RAW slots of consecutive RAWs. We assume that if a frame arrives within the RAW slot, its transmission may start only in the next RAW slot. Aside from this, we neglect the probability that some station has a successful frame transmission and that a subsequent frame arrives in the same RAW slot because RAW slots are short. The probability of a frame arriving to the empty queue during a RAW period is
. We assume that the frame is removed from the queue only after a successful transmission; i.e., the retry limit
is infinite. This assumption allows us to model the transmission process using a discrete-time Markov chain
where
t is the number of passed RAW periods and the chain state is observed at the end of the RAW slot. During the RAW period, the number
n of active stations may decrease by one, stay the same or increase up to
. The number of active stations decreases by one only if the RAW slot is successful and there is no additional frame arrival during the RAW period. In all other cases, the number of active stations only increases or stays the same. Thus, we can determine the probability
of transitioning from
i active stations to
j stations:
The stationary distribution
x can be obtained, where
is the probability to observe
n active stations at the end of the RAW slot. This distribution can be found using the balance equations and the probability normalization condition:
We define the network throughput as the number of successfully transmitted frames in a time unit. In the analytical model, we do not take into account frame drops due to the finite retry limit; i.e., the average number
of frames successfully transmitted during the RAW slot equals the average number of frames that arrive in empty queues during the RAW period. As the average number of such frames is
in the state
n, we can determine
to be
Then, the network throughput in a RAW slot
m can be found as
On average, each station transmits
frames each RAW period. Since the frame arrival is a Poisson process with intensity
, the average time between time moments when the station delivers a frame and generates new one is
. Then, the average frame transmission delay can be found to be
To obtain the energy consumption, we calculate the average energy consumption of
n active stations during the RAW slot. Denoting
i as the number of stations transmitting in the RAW slot, we get
where
is the amount of energy consumed by the transmitting station during the virtual slot,
is the amount of energy consumed by a station that is listening for an empty virtual slot, and
is the amount of energy consumed by a station that listens for a busy virtual slot.
To find the power consumed during RAW slots, we need to know the distribution of the number of active stations at the beginning of the RAW slot. We consider the matrix
A whose elements
are the probabilities that there are
j active stations at the beginning of the RAW slot
m in the current RAW if there were
i active stations at the end of the RAW slot
m in the previous RAW. The elements of the matrix
A can be found to be
Then, the average energy consumption by all stations allocated to the RAW slot
m can be found to be
and the average power consumption by one of the stations allocated to the
mth RAW slot is
4.2. Several RAW Slots
We can now expand the model for all M RAW slots of the same duration that constitute the periodic RAW. We consider the default quasi-uniform division of N stations into groups: the number of stations allocated to different RAW slots are either equal or differ by no more than 1. The RAW slots are independent of each other since the processes of frame arrival to different stations are independent as well. Using the results derived in the previous subsection, we can find the throughput, the average delay and the power consumption.
The RAW throughput can be calculated as
The average power consumption by one station in the network can be found to be
The average delay can be calculated as
5. Numerical Results and Discussion
We validate the developed analytical model with a light-weight event-based simulation, inspired by the NS-3, and use the analytical model for the optimization of the channel time consumption given the restrictions on the average delay and power consumption. Following [
3], we use the parameters listed in
Table 1. Please note that, unlike the analytical model, we do not use the assumption of an infinite retry limit in the simulation: the frame is dropped after
failed transmission attempts. The average time required to simulate
RAW periods on a single core of a non-over-clocked Intel i3-2120 processor with a
GHz frequency is less than 30 s.
First of all,
Figure 2 and
Figure 3 show the validation results for a fixed channel time consumption
. As we can see, the developed analytical model is precise for a small
. When
increases, stations start dropping frames because of the finite retry limit (see
Figure 4), which reduces the accuracy of our analytical model, which does not take the finite retry limit into account.
Figure 2 and
Figure 3 also show that, for different values of
, we have to choose different parameters of the channel access method. Thus, according to
Figure 2, for a small
and
, the option with
provides the minimal average delay and power consumption because the average number of active stations is small and
guarantees one transmission attempt in a RAW slot. However, when
increases, we have more active stations, higher contention for the channel, and, thus, a larger collision probability. In that case, choosing a smaller
K while keeping the channel time consumption fixed reduces
, the number of active stations at the beginning of each RAW slot decreases and the contention for the channel also decreases, leading to a reduction in the average delay and power consumption.
A similar effect can be observed in
Figure 3. In the case of a low
, the number of active stations is small, and we need the smallest
possible to reduce the probability of an empty RAW slot. However, when
increases, we have to pay more attention to collisions in RAW slots and reduce the probability of collision by increasing
.
We now present the developed analytical model for the minimization of the channel time consumption given the restrictions on the average power consumption
and the average frame delivery delay
. We consider a fixed
and
M and solve the following optimization problem:
While solving the optimization problem, we use the binary search for and the exhaustive search for and K because they are discrete variables. Since is the maximal number of virtual slots within the RAW slot, we do not consider , as in that case empty virtual slots are wasted at the end of the RAW slot. If , then a station may draw a high enough initial value for the backoff counter to have no opportunity to transmit in the current RAW slot. While this situation is undesirable in the case of a small number of active stations, it might help to reduce the contention for the channel and thus the channel time consumption when the number of active stations is high. The contention window size regulates only the probability that an active station makes a channel access attempt; however, the maximal number of empty virtual slots K affects both the probability of a channel access attempt and the channel time consumption . If the number of active stations is relatively high, it might be more optimal to reduce the contention for the channel by setting a high , but at the same time to keep a low K with frequent RAWs. Since this is difficult to decide a priori, we consider when solving the optimization problem.
Figure 5 shows the results of the channel time consumption minimization done separately by the analytical model and with the simulation. The optimal solutions
obtained with the analytical model and with the simulation might be different because the retry limit is finite in the simulation and infinite in the analytical model. Note that, in all the considered scenarios, in the selected optimal configuration, the percentage of delivery failures caused by the retry limit excess is below 0.3%; i.e., the network is not overloaded, which confirms that the assumption does not affect the results significantly. We also find that the optimal channel time consumption found by the analytical model is close to that obtained with the simulation.
We also investigate whether the optimal solution given by the analytical model satisfies the restrictions on the average delay and the power consumption according to the simulation. The restriction on power consumption is always satisfied. The average difference between the simulation’s power consumption and the restriction is ≈−0.8 mW. The average difference between the simulation’s average delay and the restriction is ≈−0.01 s, while the maximal difference is ≈0.001 s; i.e., there are some cases in which the optimal solution obtained via the analytical model does not satisfy the restriction on the average delay, but the discrepancy is very small compared with the restriction of 0.1 s.
The higher the value of
, the higher the fraction of the channel time required to successfully deliver frames while satisfying the restrictions on the average power consumption and average delay. However, the higher the value of
, the higher the throughput, because sensors generate and transmit frames more intensively. As we can see from
Figure 5a, for a small
, uniting all sensors into a single group is more efficient because it allows a lower channel time consumption to be achieved. For a large
, the situation is opposite. We see a tradeoff between the delivery delay and power consumption (see
Figure 6).
On the one hand, in the case of a small
,
Figure 6 shows that the power consumption is small and does not affect the optimization process; i.e., the minimal achievable channel time consumption is defined by the restriction on the average delay. Furthermore, a small
shows that the number of active sensors is small, and so the probability of successful transmission in a RAW slot is high. In that case, the growth of the number of groups increases the channel time consumption if we keep the RAW period fixed and may even lead to the waste of an allocated channel time: the number of sensors within one group decreases when we increase the number of groups, and the probability of an empty RAW slot also increases. Increasing the RAW period would reduce the channel time consumption, but it would also lead to less frequent RAWs and higher delivery delays. Since the restriction on the average delay defines the feasibility of the solution in the case of a small
, we cannot increase the RAW period enough to achieve the same channel time consumption as in the case of a smaller number of groups.
On the other hand, in the case of a high
,
Figure 6 shows that the power consumption is close to the restriction; i.e., the restriction which defines the minimal achievable channel time consumption is exactly the restriction on the power consumption. A high
leads to high power consumption because the number of active sensors is large no matter how large the RAW period is, and sensors are forced to contend for the channel access and make retransmissions after frame collisions. The division of sensors into several groups allows the number of sensors simultaneously contending for the channel to be reduced, thus reducing the contention and the power consumption. That is the reason why, in the case of a large
, several RAW slots are more efficient than one frequent RAW slot, and we need to change the number of groups for a large
.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}