
Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network


Abstract
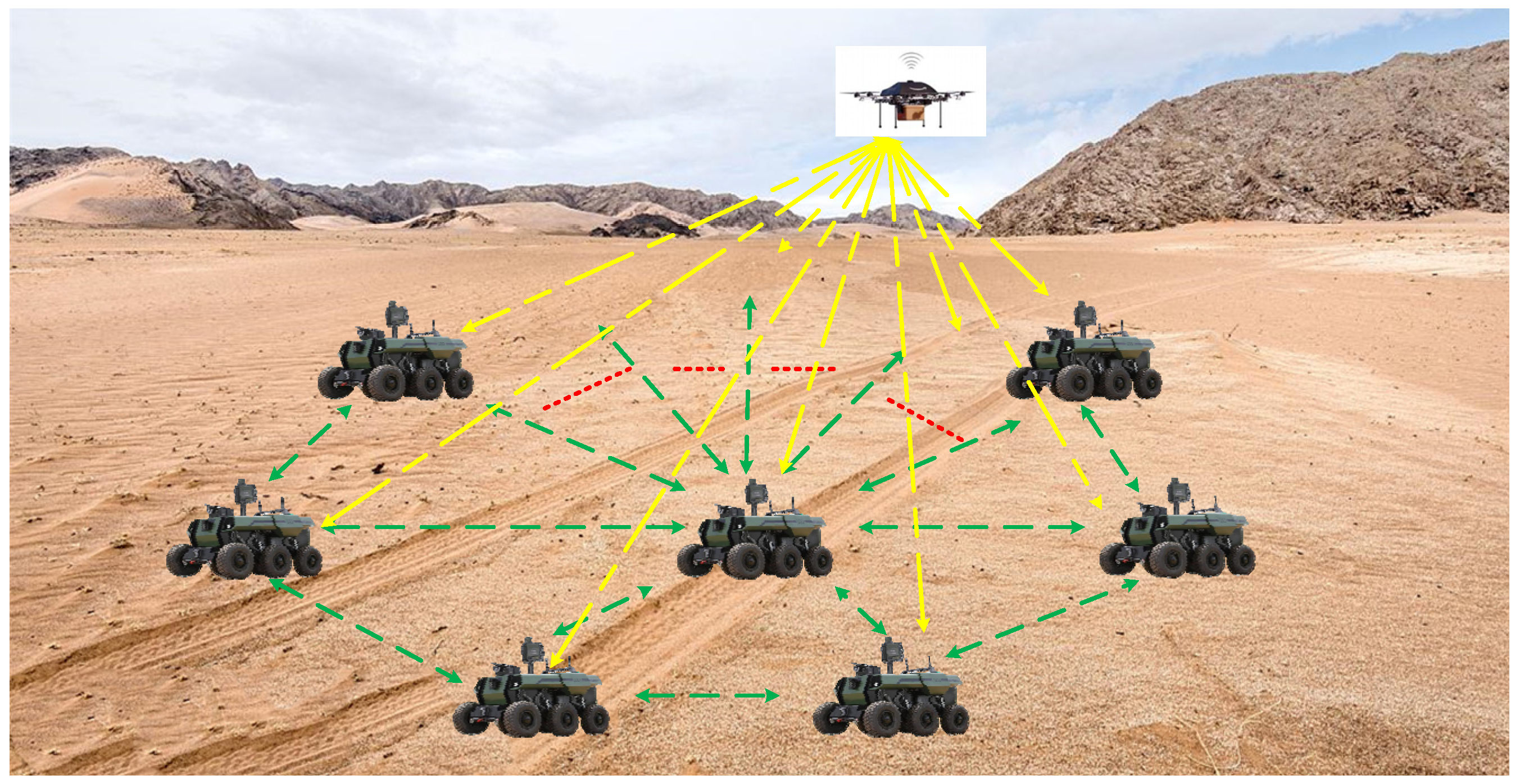
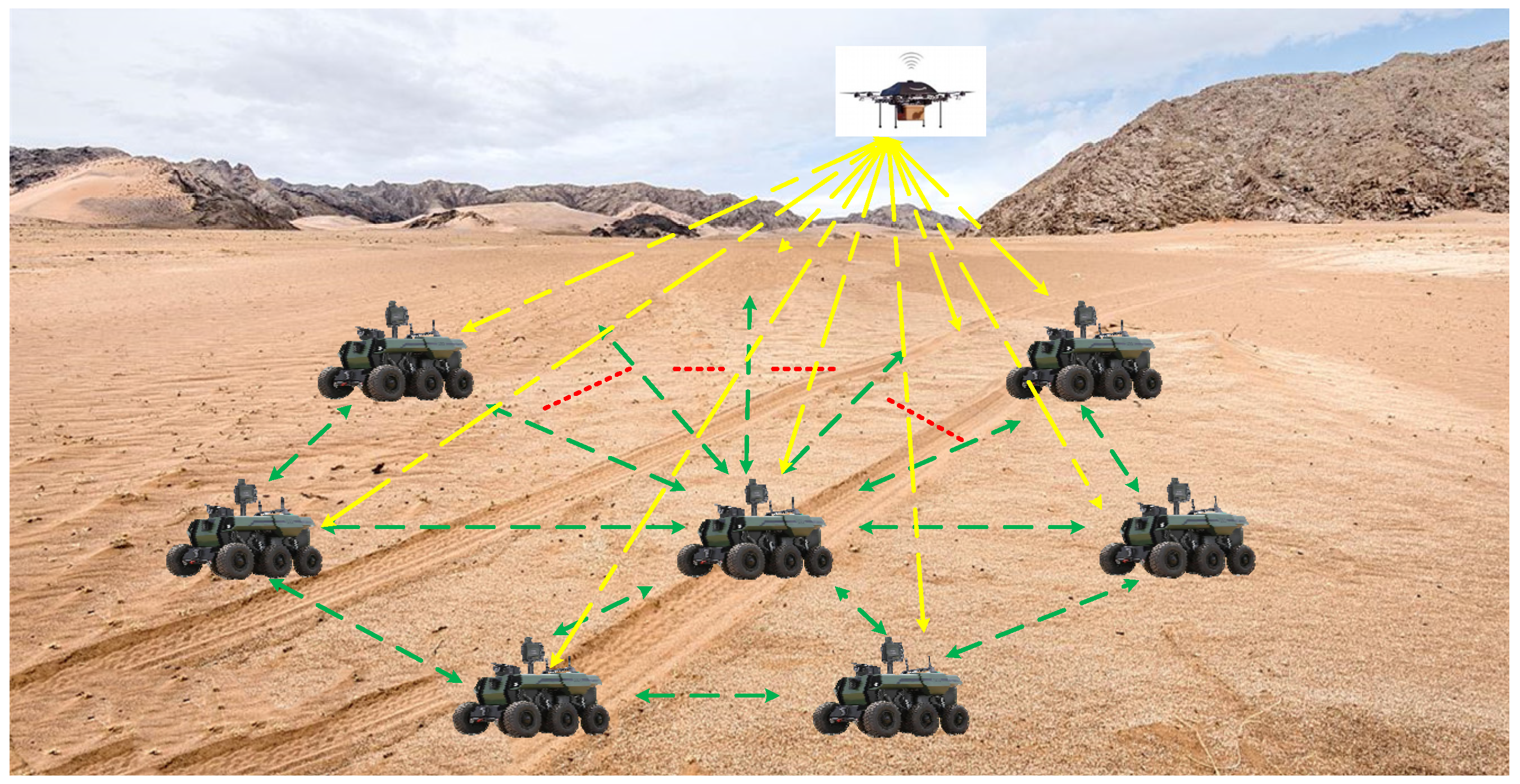
:1. Introduction
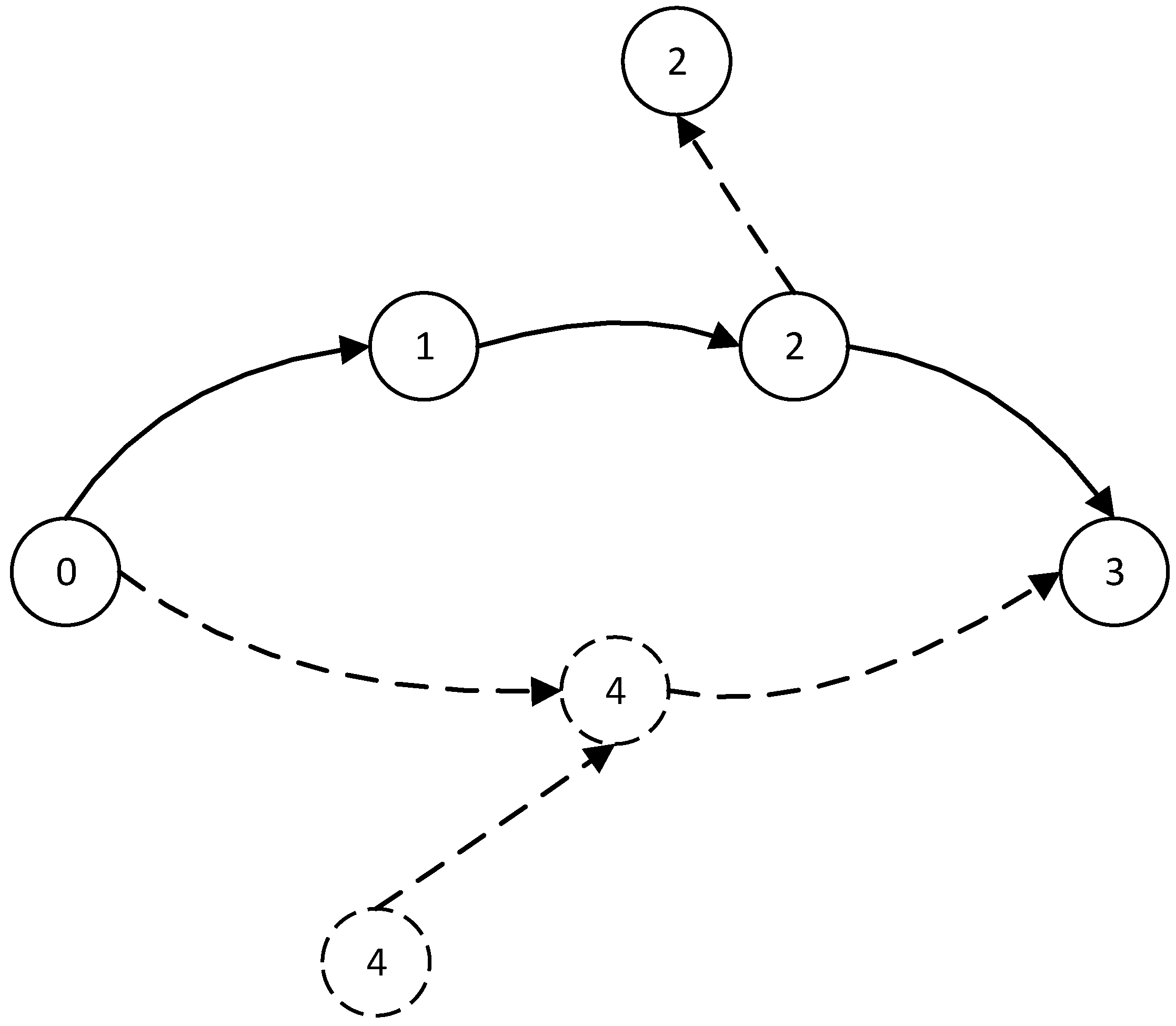
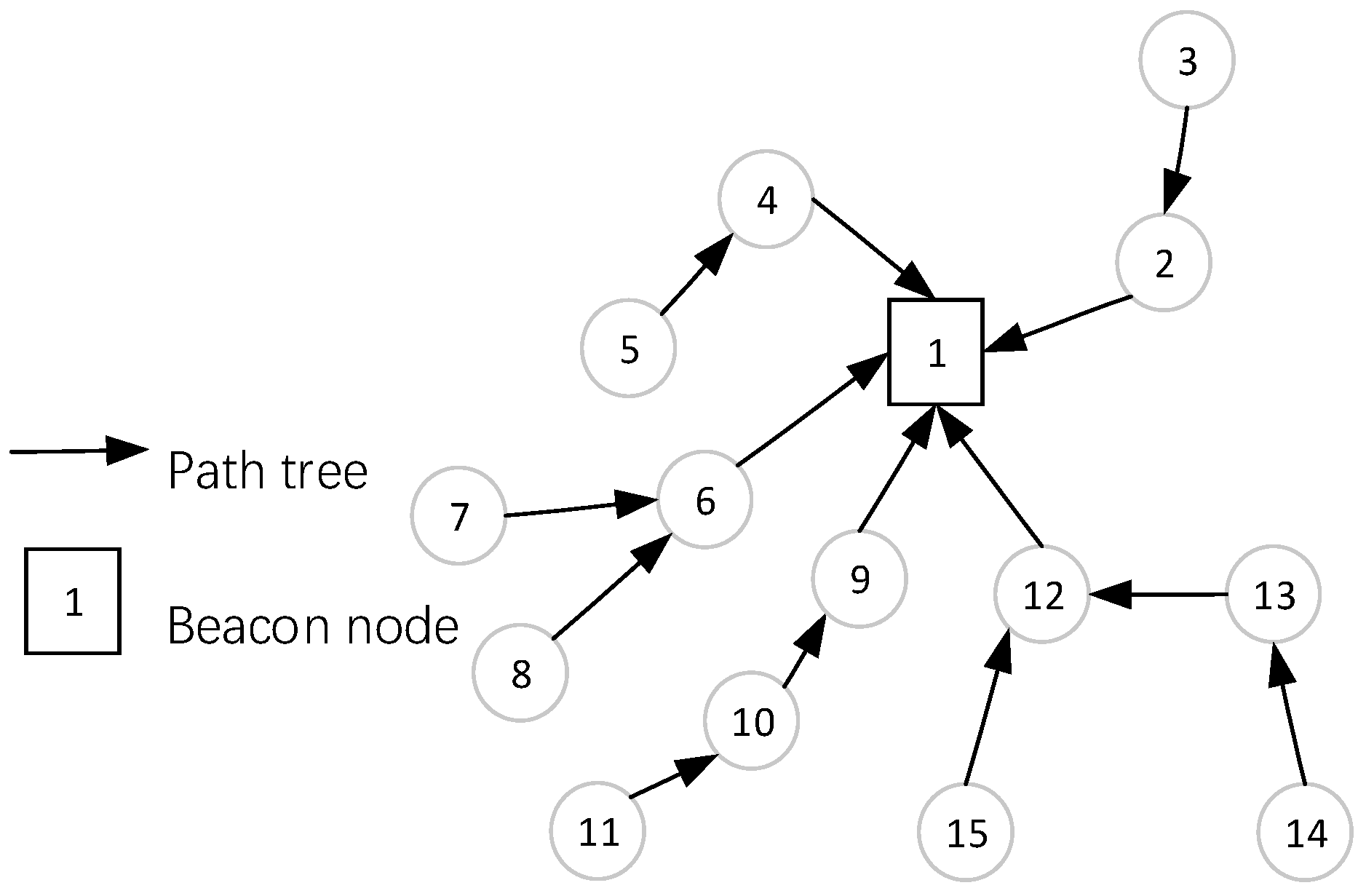
- In this protocol, a periodic beacon pulse was used to actively discover and maintain the path tree of the node, and the path was built from the source node to the destination on demand, which reduced the cost of routing protocols.
- Active paths were maintained under the guidance of periodic beacon pulses, so as to improve the stability and reliability of routing network paths.
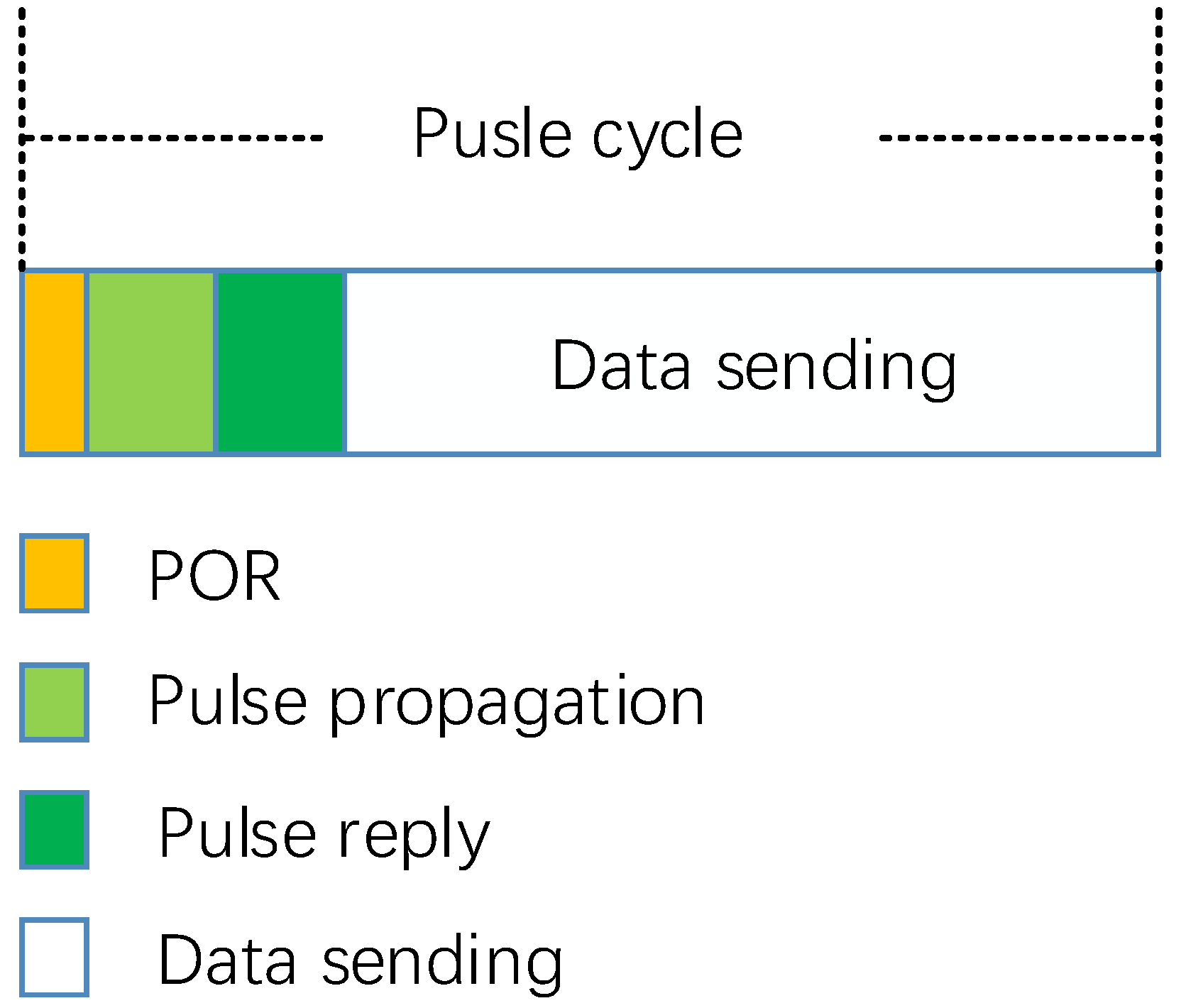
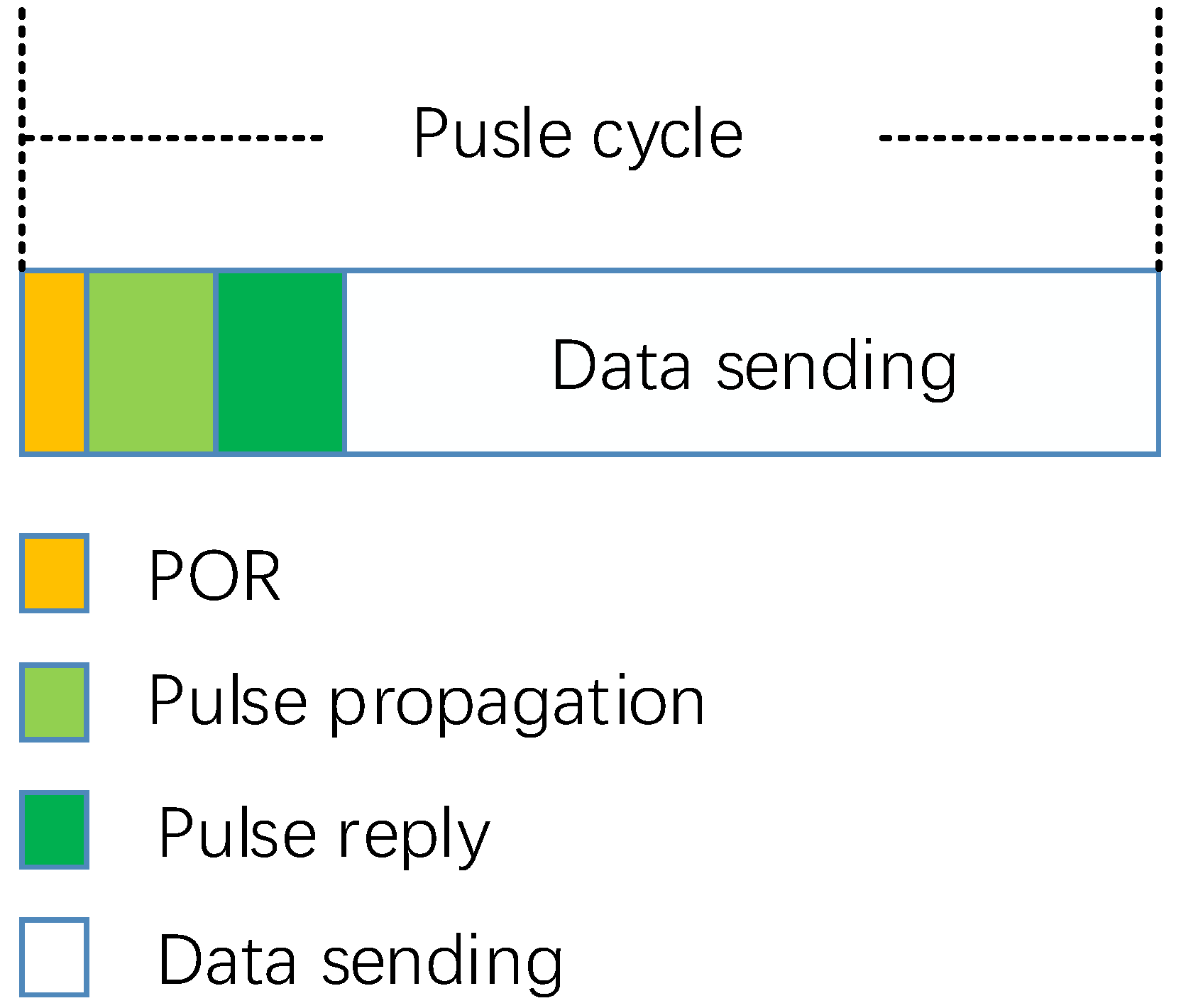
- In the beacon-based hybrid routing protocol for LUVAN, a pulse cycle was the basic unit. A pulse cycle was divided into four phases, each of which was executed in a fixed time and the cost controlled by the routing protocol was only related to the time allocated in the first three phases.
- In Section 1, the implementation method of beacon-based hybrid routing protocol is introduced.
- In Section 2, the effectiveness of beacon-based hybrid routing protocol is analyzed.
- In Section 3, an NS3 network simulation platform is used to compare and analyze the performance of beacon-based hybrid routing protocol, DSDV protocol and AODV protocol.
- Finally, the conclusion of this paper is in Section 4.
2. Beacon-Based Multi-Agent Network Hybrid Routing Algorithm
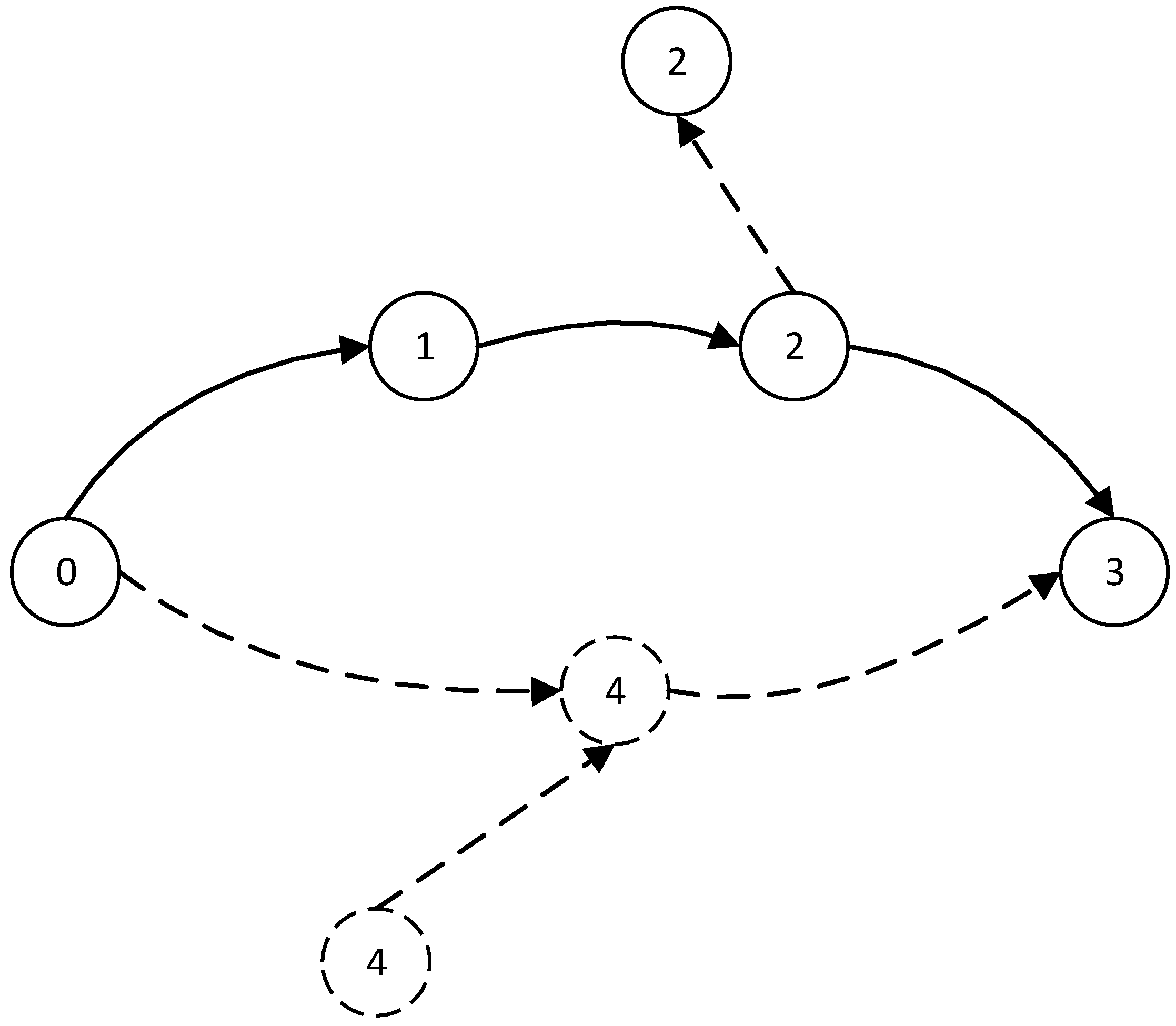
2.1. Pulse Message
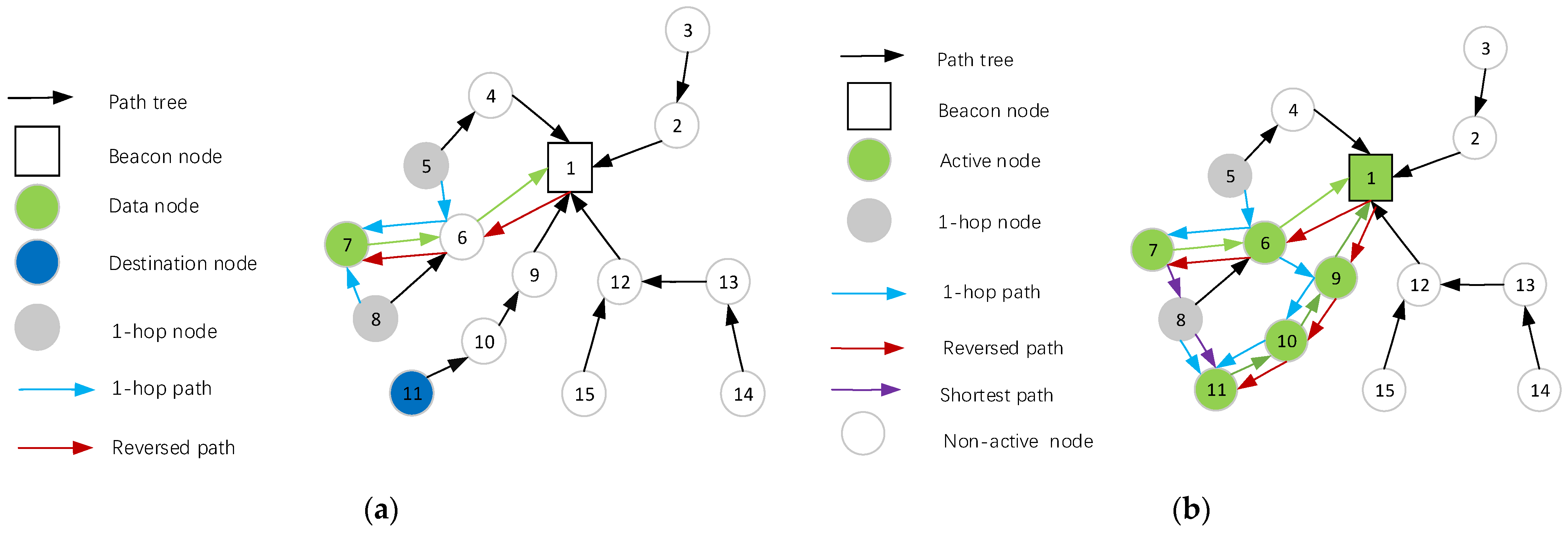
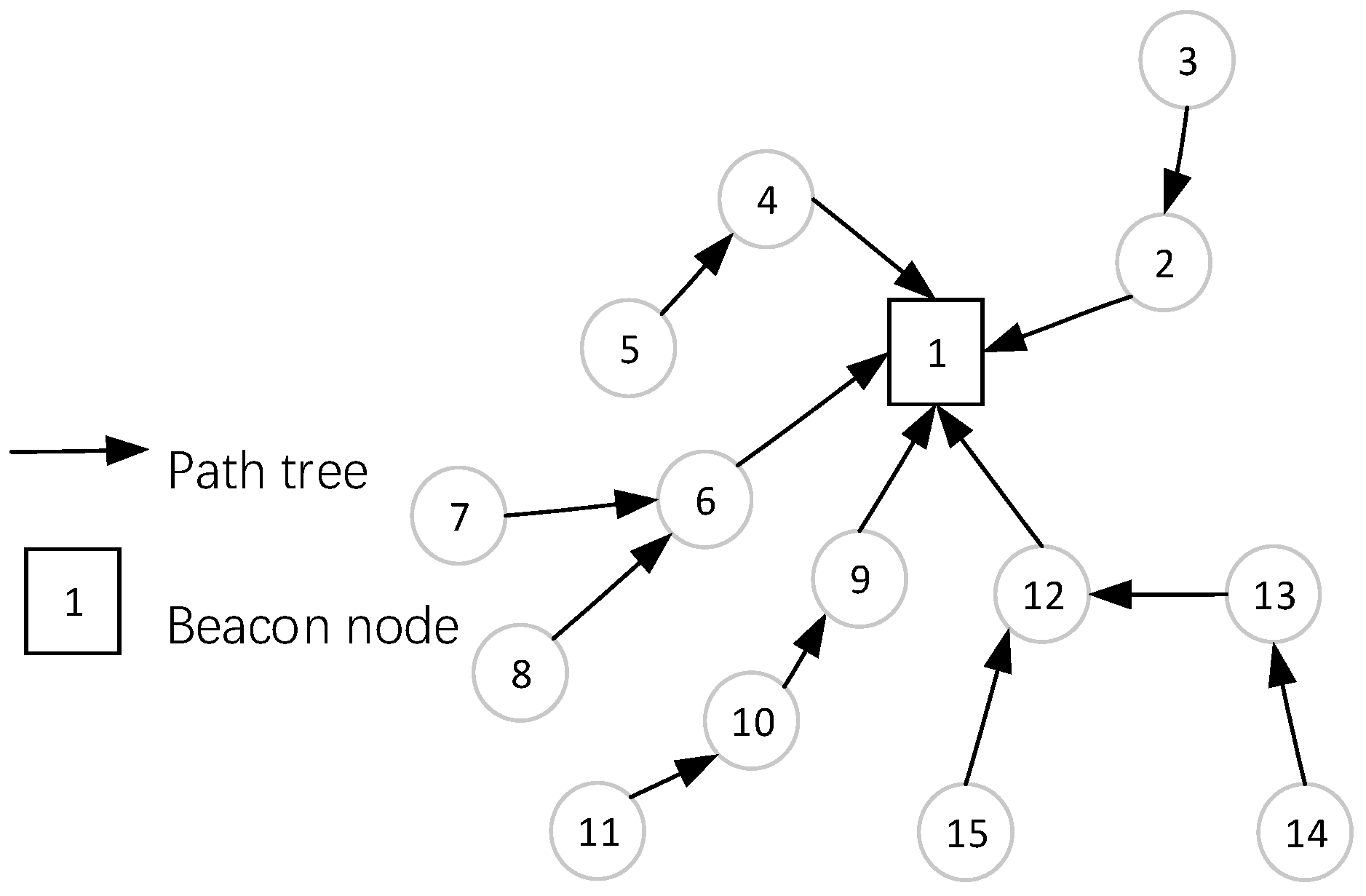
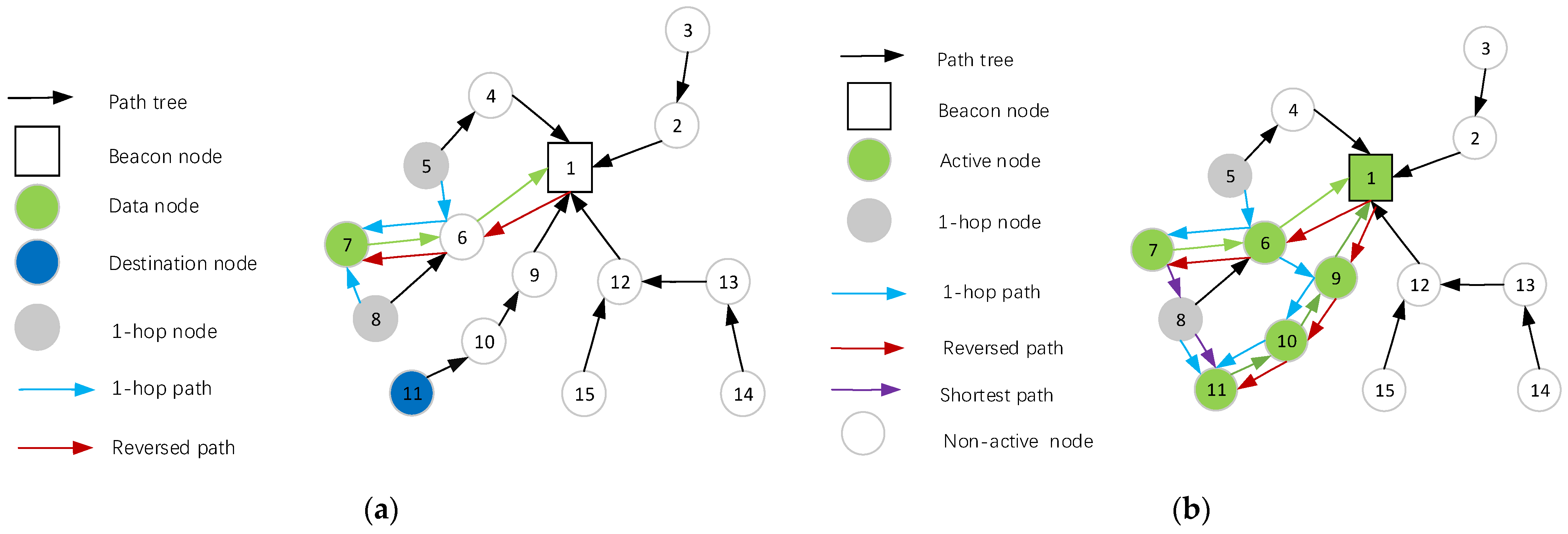
2.2. Path Discovery and Maintenance
2.2.1. Path Discovery
| Algorithm 1. Source node path request process. | |
| 1 | Tp: Pulse Propagation time |
| 2 | Tr:Pluse Reply time |
| 3 | Td:Data Sending time |
| 4 | If T > Tp and T < Tr |
| 5 | Source node send a pulse reply message along the OPT. |
| 6 | OPT node unicast reply message. |
| 7 | Elif T > Tr and T < Td |
| 8 | Source node send data along the path tree. |
| 9 | Else |
| 10 | Wait until the time reaches Tr. |
| 11 | End if |
| Algorithm 2. Beacon node path request process. | |
| 1 | Pt: Path information table |
| 2 | Pd: Path to the destination address |
| 3 | Tp: Pulse Propagation time |
| 4 | Becaon node received the pulse reply message: |
| 5 | If Pd is in Pt: |
| 6 | Becaon node created a reverse path to the source node. |
| 7 | Else: |
| 8 | Becaon node created a reverse path to the source node. |
| 9 | If T < Tp: |
| 10 | Becaon node send a pulse message with the destination address. |
| 11 | |
| 12 | Else: |
| 13 | Wait until next pulse cycle. |
| 14 | End if |
| 15 | End if |
2.2.2. Optimal Path Creation
2.3. Beacon-Based Hybrid Routing Protocol
3. Results
3.1. Simulation Environment
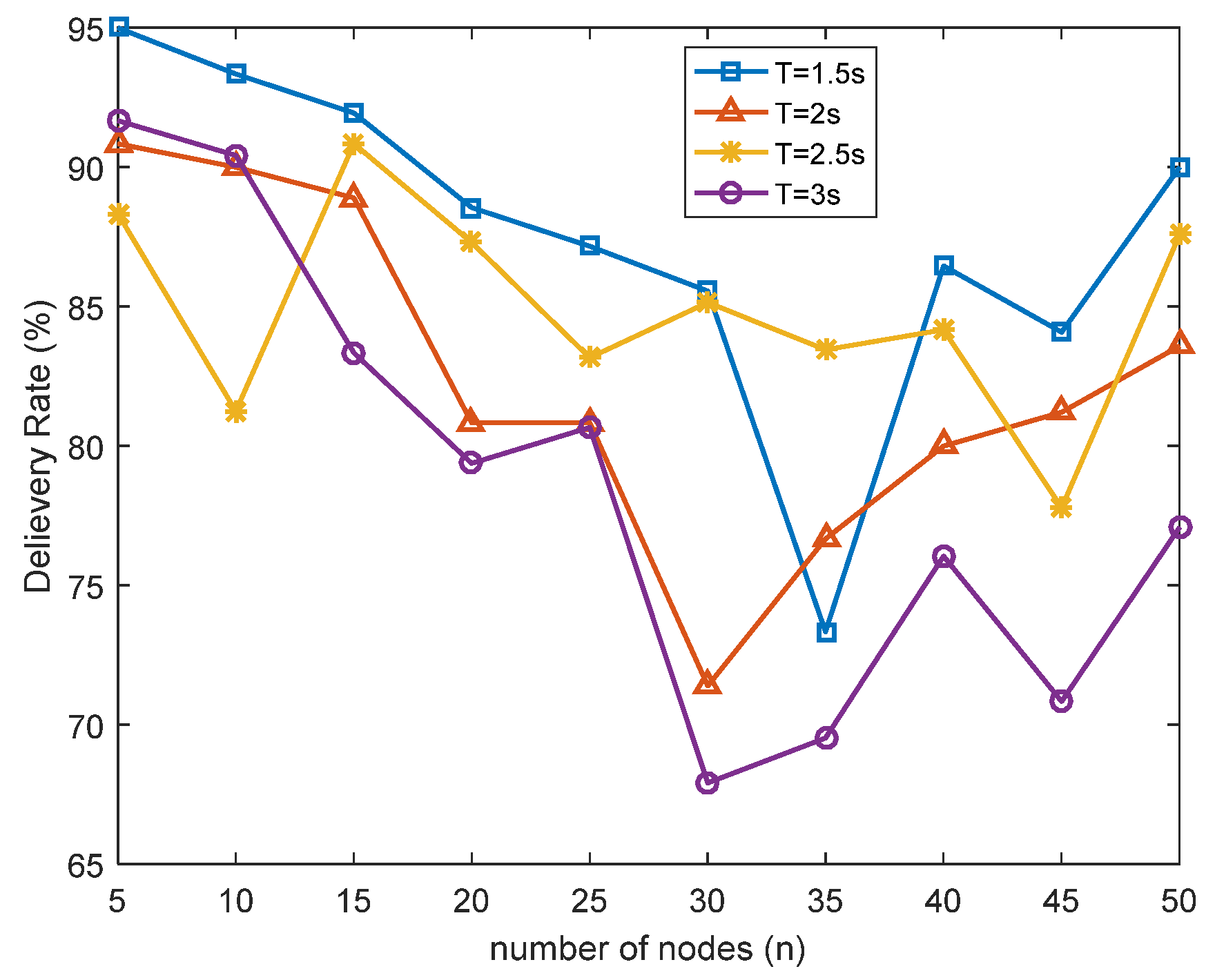
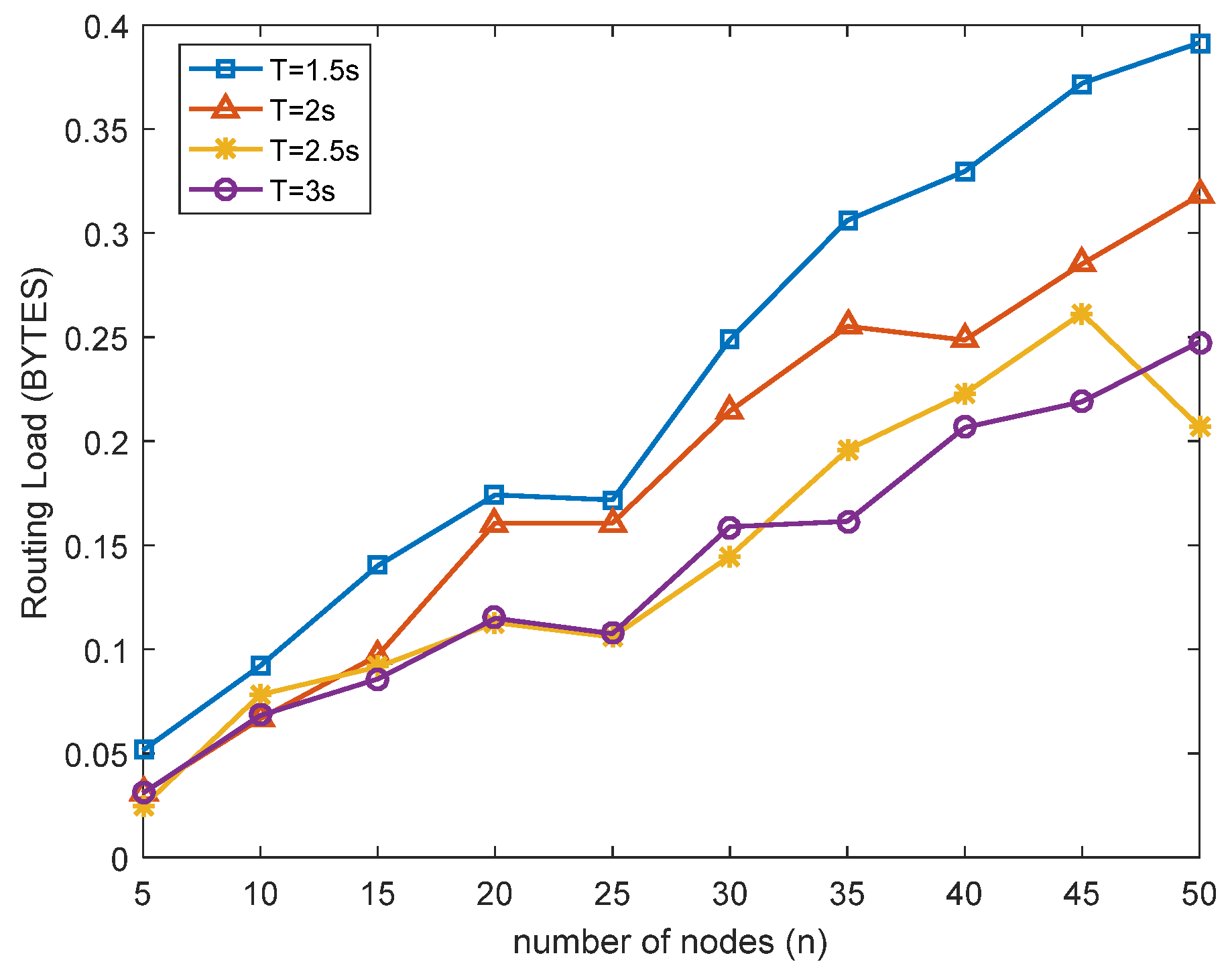
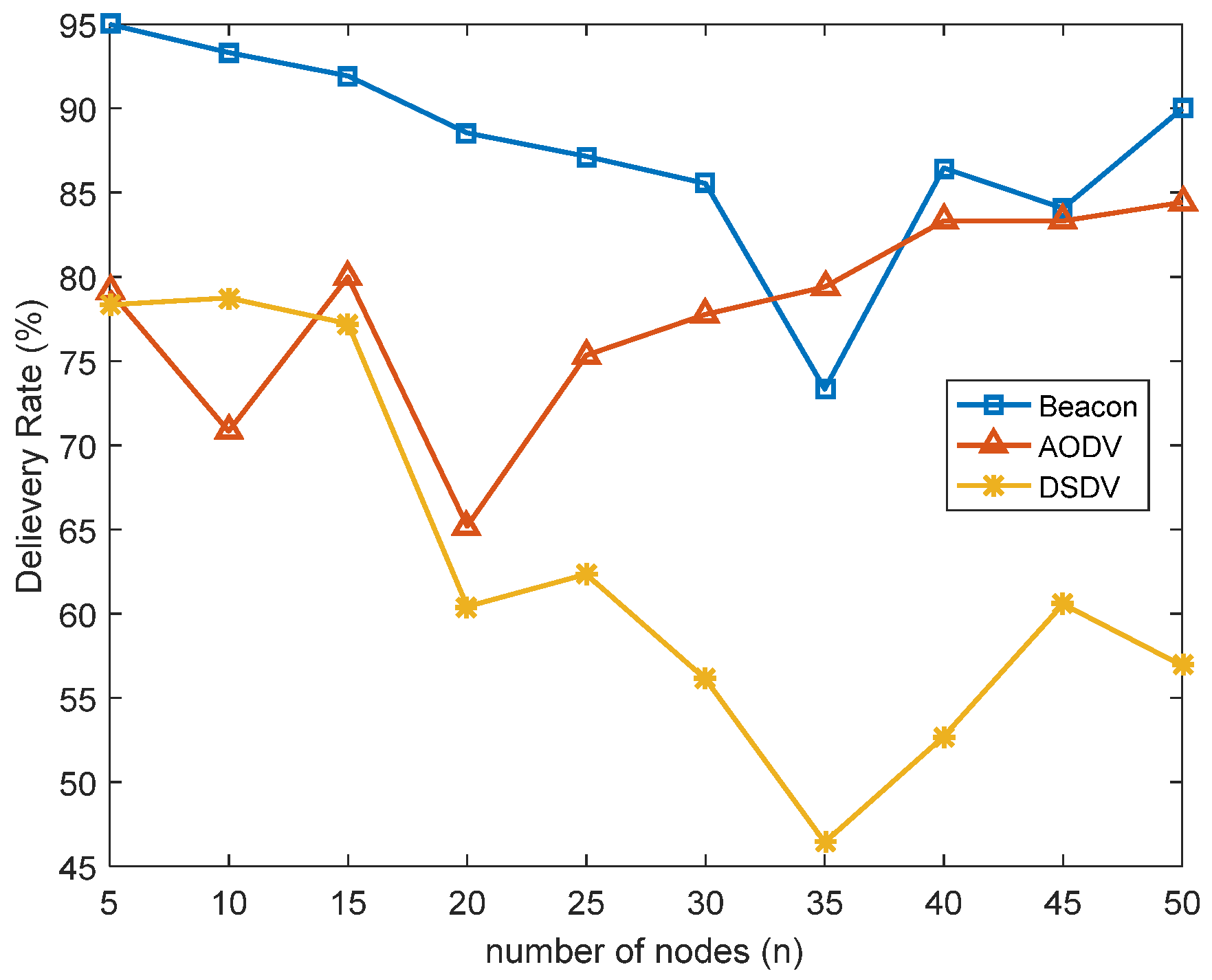
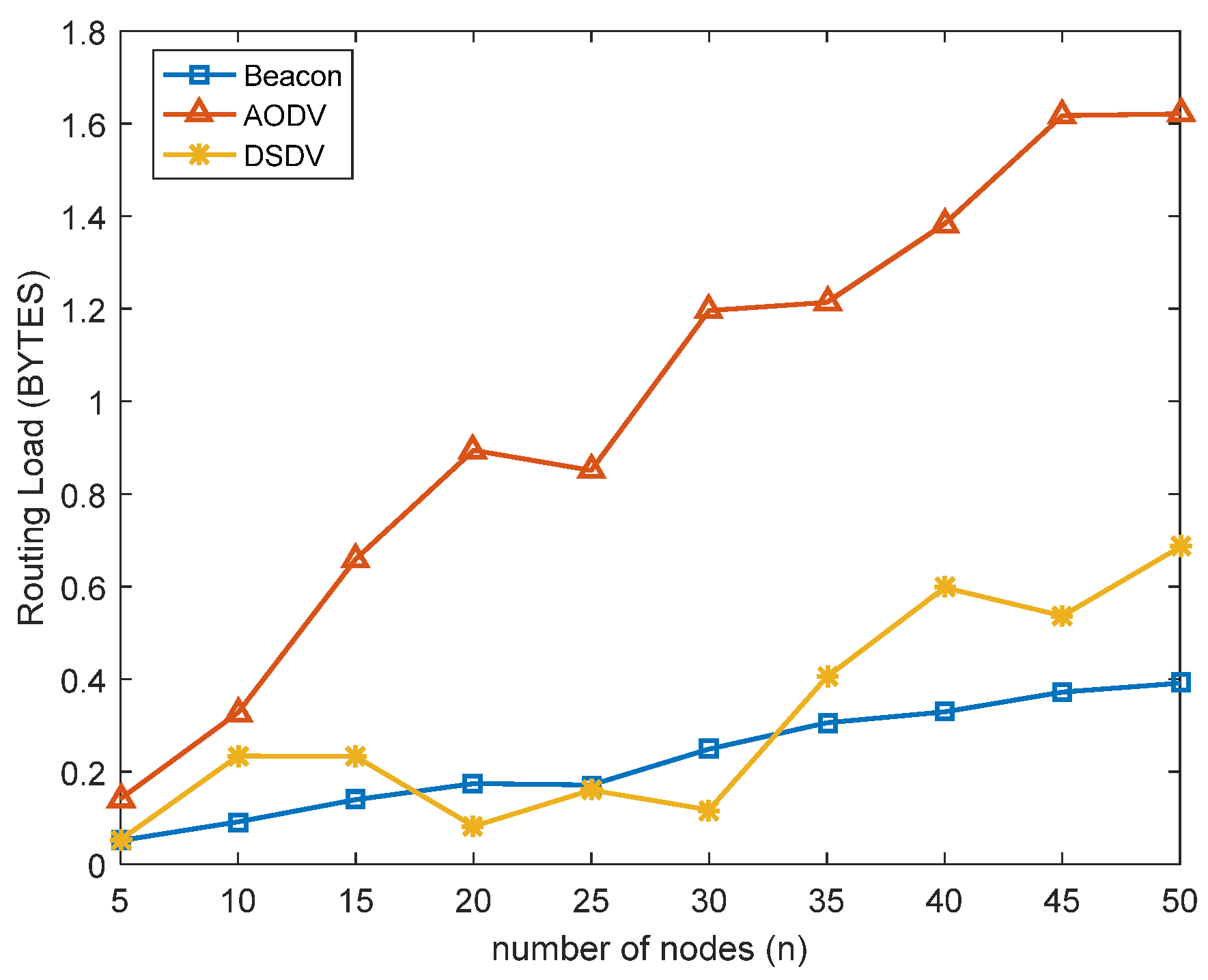
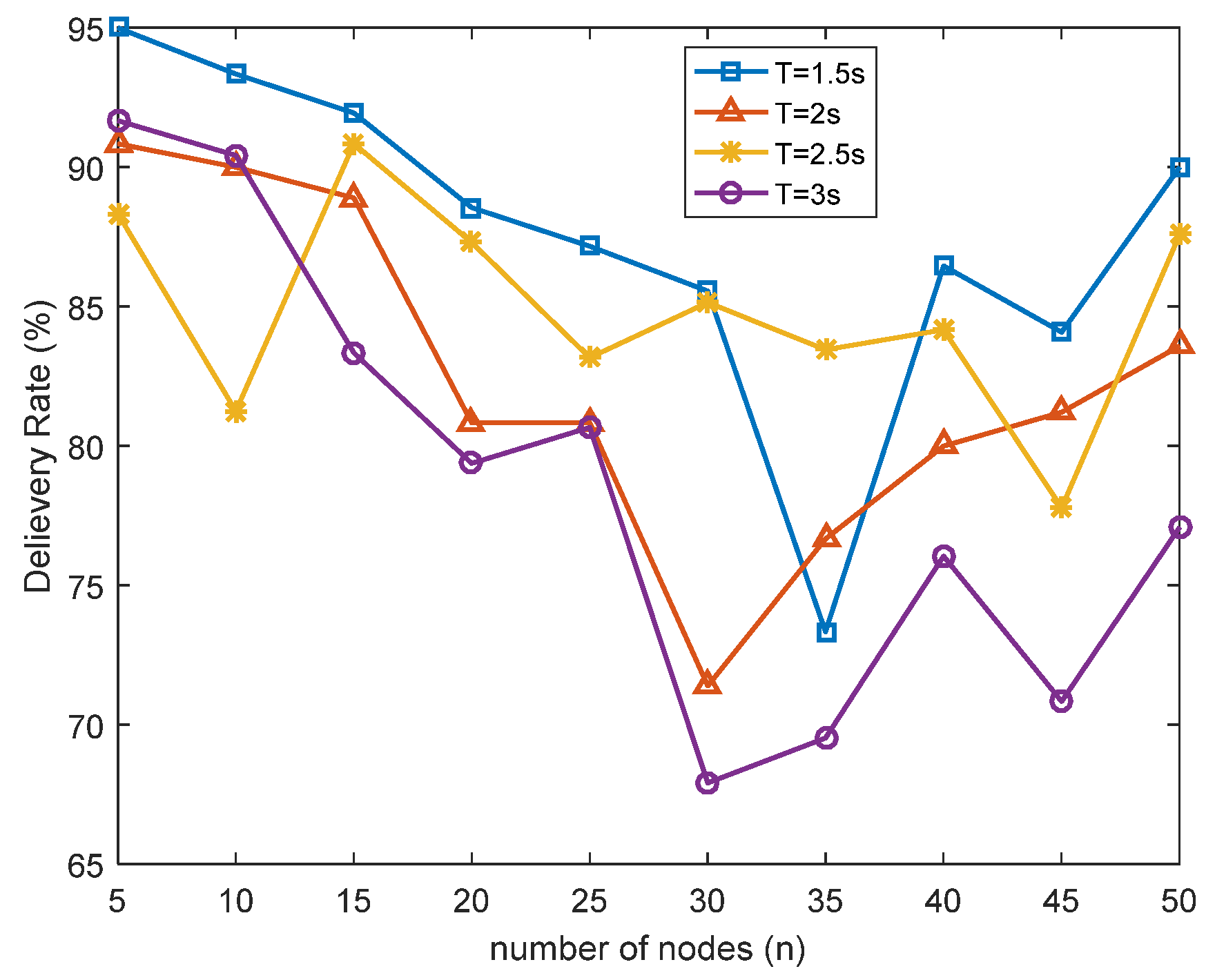
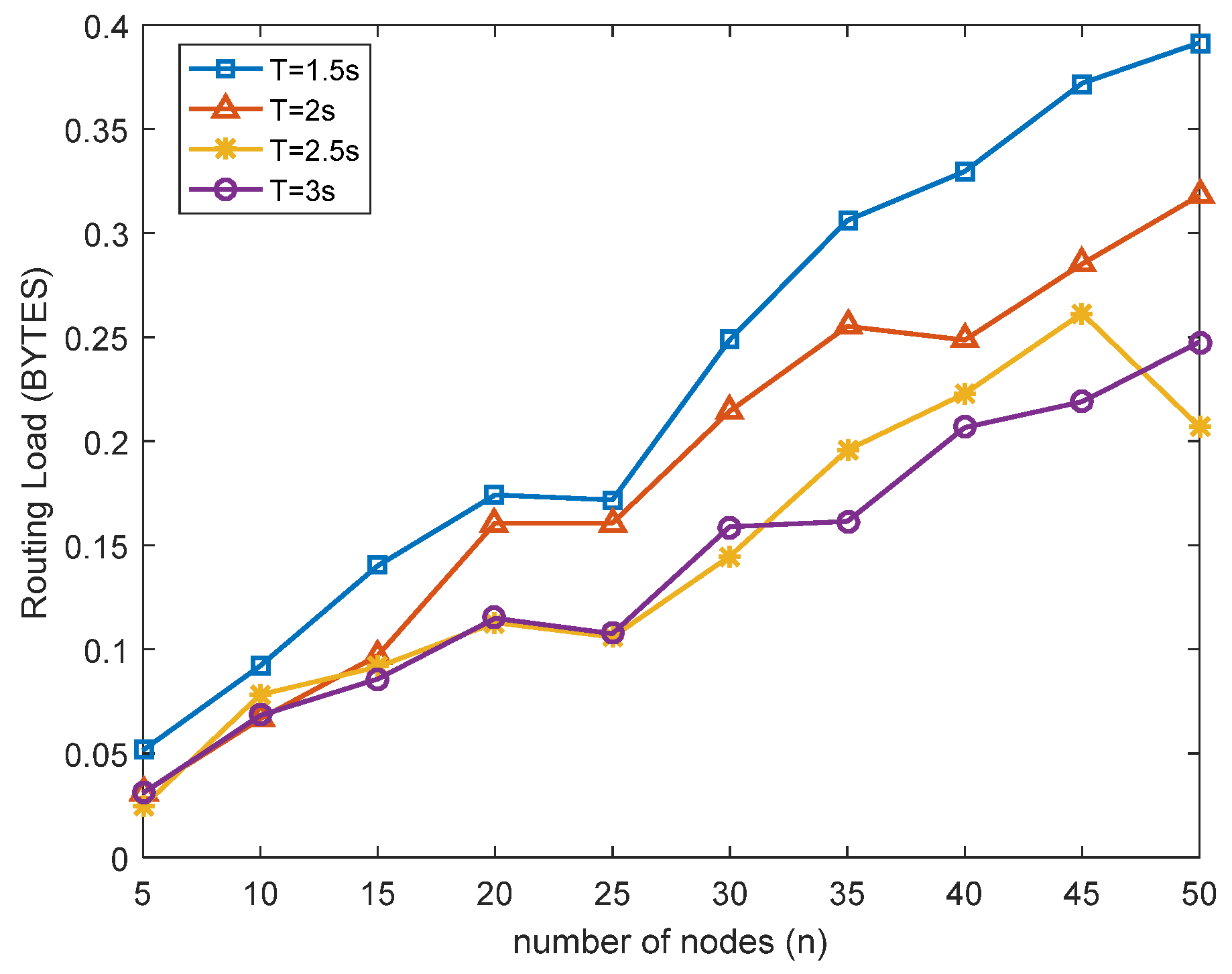
3.2. Results and Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.; PLoSila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Adiguzel, F.; Mumcu, T.V. Robust discrete-time nonlinear attitude stabilization of a quadrotor UAV subject to time-varying disturbances. Elektron. Elektrotechnika 2021, 27, 4–12. [Google Scholar]
- Ulku, E.; Dogan, B.; Demir, O.; Bekmezci, I. Sharing location information in multi-UAV systems by common channel multi-token circulation method in FANETs. Elektron. Elektrotechnika 2019, 25, 66–71. [Google Scholar] [CrossRef] [Green Version]
- Ramanathan, R.; Redi, J. A brief overview of ad hoc networks: Challenges and directions. IEEE Commun. Mag. 2002, 40, 20–22. [Google Scholar] [CrossRef]
- Basci, A.; Can, K.; Orman, K.; Derdiyok, A. Trajectory tracking control of a four rotor unmanned aerial vehicle based on continuous sliding mode controller. Elektron. Elektrotechnika 2017, 23, 12–19. [Google Scholar] [CrossRef]
- Zafar, S.; Tariq, H.; Manzoor, K. Throughput and delay analysis of AODV, DSDV and DSR routing protocols in mobile ad hoc networks. Int. J. Comput. Netw. Appl. 2016, 3, 1–7. [Google Scholar]
- Shafiq, M.; Ashraf, H.; Ullah, A.; Masud, M.; Azeem, M.; Jhanjhi, N.; Humayun, M. Robust cluster-based routing protocol for IoT-assisted smart devices in WSN. Comput. Mater. Contin. 2021, 67, 3505–3521. [Google Scholar] [CrossRef]
- Godfrey, D.; Kim, B.; Miao, H.; Shah, B.; Hayat, B.; Khan, I.; Kim, K. Q-learning based routing protocol for congestion avoidance. Comput. Mater. Contin. 2021, 68, 3671. [Google Scholar] [CrossRef]
- Del-Valle-Soto, C.; Mex-Perera, C.; Aldaya, I.; Lezama, F.; Nolazco-Flores, J.; Monroy, R. New detection paradigms to improve wireless sensor network performance under jamming attacks. Sensors 2019, 19, 2489. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharma, A.; Dongsoo, S. Energy efficient multipath ant colony based routing algorithm for mobile ad hoc networks. Ad Hoc Netw. 2021, 113, 102396. [Google Scholar] [CrossRef]
- Ahamed, A.; Vakilzadian, H. Impact of direction parameter in performance of modified AODV in VANET, J.J. Sens. Actuator Netw. 2020, 9, 40. [Google Scholar] [CrossRef]
- Kumar, P.; Verma, S. Implementation of modified OLSR protocol in AANETs for UDP and TCP environment. J. King Saud Univ. -Comput. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Wahid, I.; Ullah, F.; Ahmad, M.; Khan, A.; Uddin, M.; Alharbi, A.; Alosaimi, W. Quality of service aware cluster routing in vehicular Ad Hoc Networks. Comput. Mater. Contin. 2021, 67, 3949–3965. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of nodes | 50 |
| Bandwidths (Mbps) | 5 |
| Cover range (m2) | 1000 × 1000 |
| Data package (Byte) | 512 |
| Active link data | 5, 10, 15, 20, 25, 30, 35, 40, 45, 50 |
| Communication speed rate/Kbps | 10 |
| Simulation time (s) | 180 |
| communication start time/s | 80 |
| Link active time (s) | 10 |
| Node velocity (m·s−1) | 5 |
| Pulse cycle (s) | 1.5 |
| Parameter | Value |
|---|---|
| Pulse cycle/sec | 1.5 |
| POR/msec | 10 |
| Pulse Propagation/msec | 70 |
| Pulse Reply/msec | 70 |
| Data Sending/sec | 1.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, W.; Li, G.; Ma, Y.; Wang, R.; Li, Y.; Li, Z. Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network. Electronics 2021, 10, 3129. https://doi.org/10.3390/electronics10243129
Mu W, Li G, Ma Y, Wang R, Li Y, Li Z. Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network. Electronics. 2021; 10(24):3129. https://doi.org/10.3390/electronics10243129
Chicago/Turabian StyleMu, Weiwei, Guang Li, Yulin Ma, Rendong Wang, Yanbo Li, and Zhixiong Li. 2021. "Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network" Electronics 10, no. 24: 3129. https://doi.org/10.3390/electronics10243129
APA StyleMu, W., Li, G., Ma, Y., Wang, R., Li, Y., & Li, Z. (2021). Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network. Electronics, 10(24), 3129. https://doi.org/10.3390/electronics10243129