
Integrated Communication and Control Design for Fuel-Efficient Vehicle Platooning



Abstract
:1. Introduction
- 1.
- To smoothly respond to traffic perturbations and explicitly handle the vehicle state and control constraints, we propose a modified DMPC method. Through joint optimization of local vehicle fuel economy and velocity error characteristics between local vehicle and multiple preceding vehicles, adaptive driving/braking torque is obtained to smoothly respond to traffic perturbations while improving fuel efficiency. In addition, a safety mechanism is designed to maintain a safe distance gap with the preceding vehicle.
- 2.
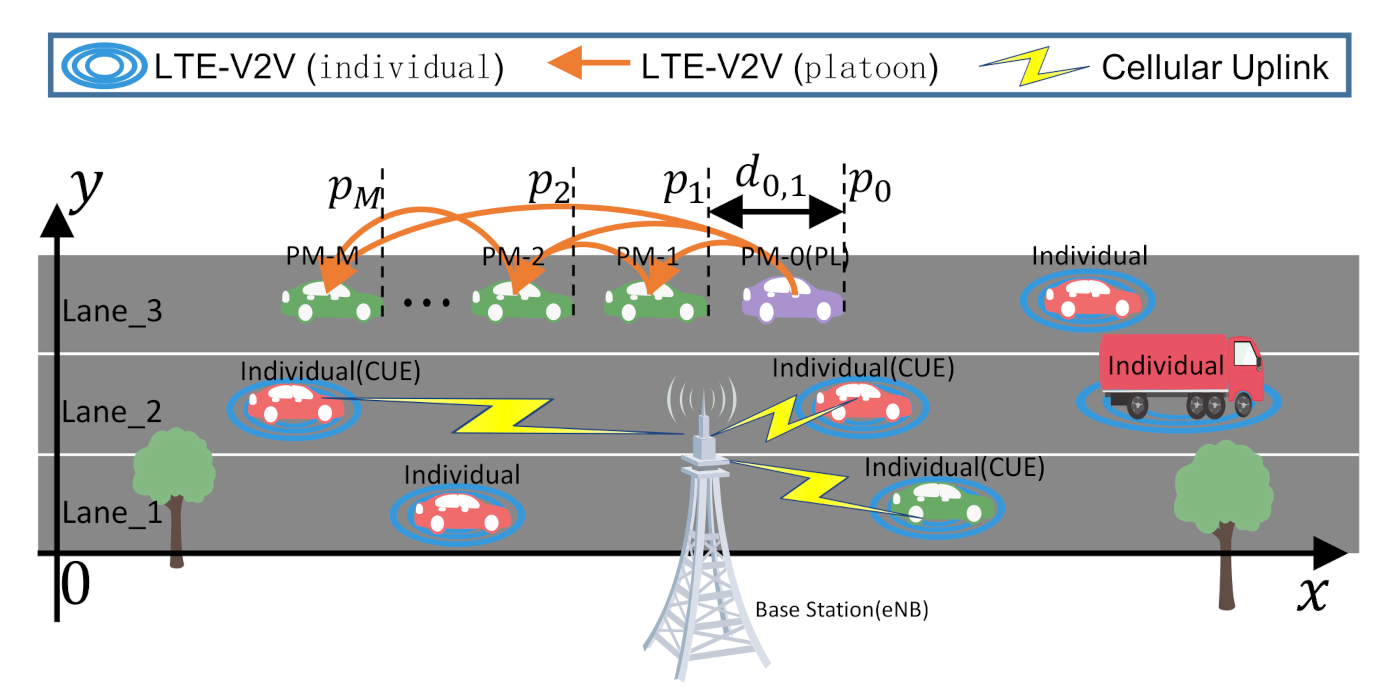
- In the LTE-V network, LTE-V mode 3 is assumed, and the underlay mode of V2V communication is adopted. Since the velocities of multiple vehicles could help the vehicle to respond to traffic perturbations smoothly and improve fuel efficiency, we model a radio resource allocation optimization problem to improve CAMs dissemination. Further, this problem is solved in two steps, including maximum V2V broadcast distance and minimum weight matching. The resource allocation scheme increases the platoon-based V2V broadcast distance while ensuring the ergodic capacity (the long-term average capacity of a time-varying channel) requirement of the cellular user (CUE) uplink communication and the reliability of platoon-based V2V communication. In the case of a limited number of uplink channels that can be reused in the platoon, this solution still maintains the state convergence and fuel efficiency of the platoon.
- 3.
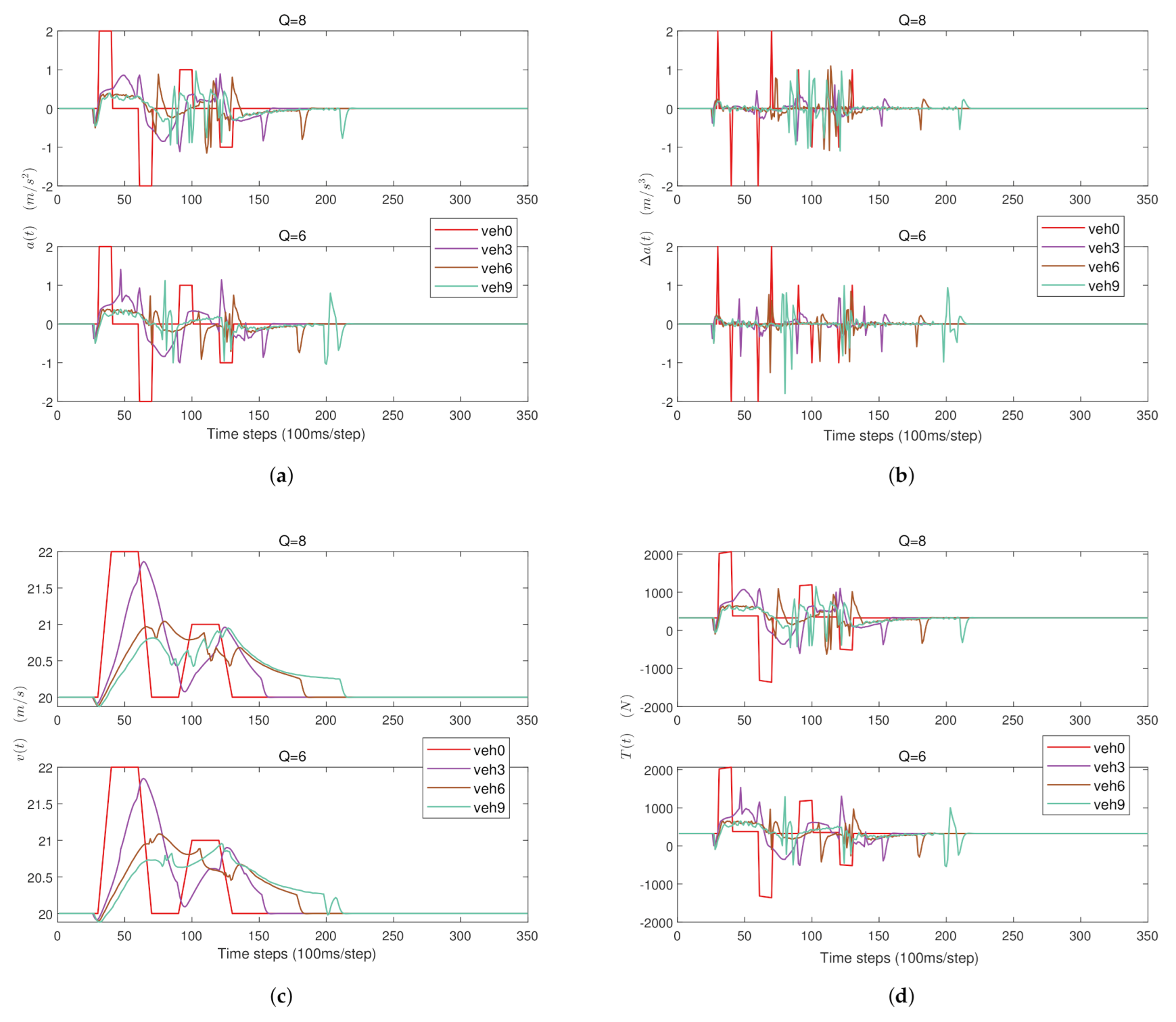
- We investigate the platoon performance of the proposed modified DMPC method in different numbers of reusable uplink channels. Simulation results show that the platoon can maintain state convergence while ensuring the ergodic capacity requirement of CUE uplink communication. Furthermore, in comparison with other DMPC platoon control technologies, our proposed design has better fuel efficiency.
2. System Model
2.1. Vehicle Dynamics
2.2. Platoon Control
2.3. Fuel Consumption Model
2.4. Platoon-Based V2V Communication
3. DMPC-Based Platoon Control
3.1. Objective Function
3.2. Constraints
3.3. DMPC Design
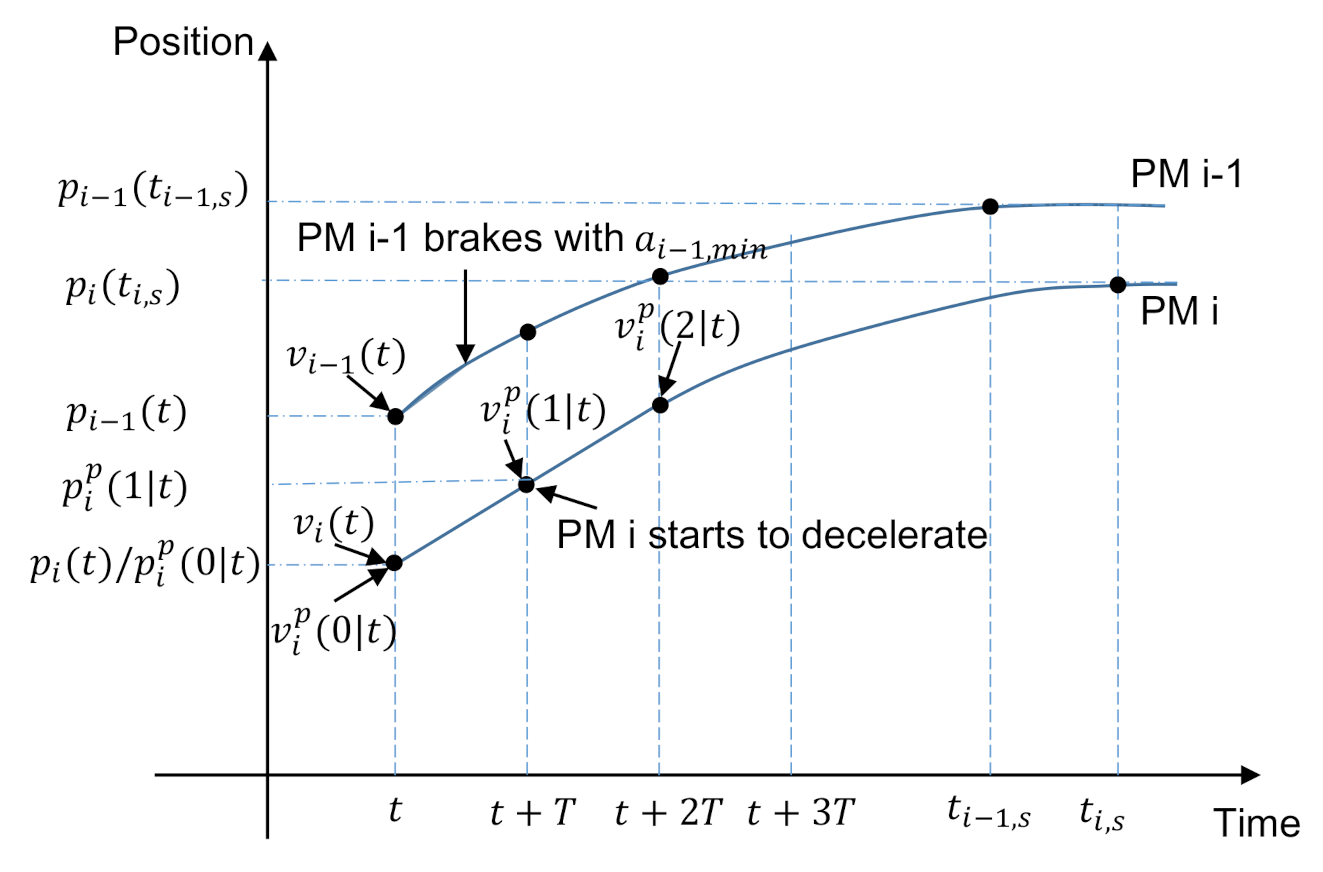
3.4. Safety Mechanism Design
3.4.1. Without Solution to the DMPC Problem
3.4.2. With Solution to the DMPC Problem
4. Resource Allocation for Platoon-Based V2V Communication
4.1. Problem Formulation of Resource Allocation
4.2. Solution of the Formulated Problem
| Algorithm 1: Resource Allocation Scheme. |
| Input: Platoon-based V2V broadcast link , uplink channel and corresponding large-scale channel power gain, platoon size . Output: . 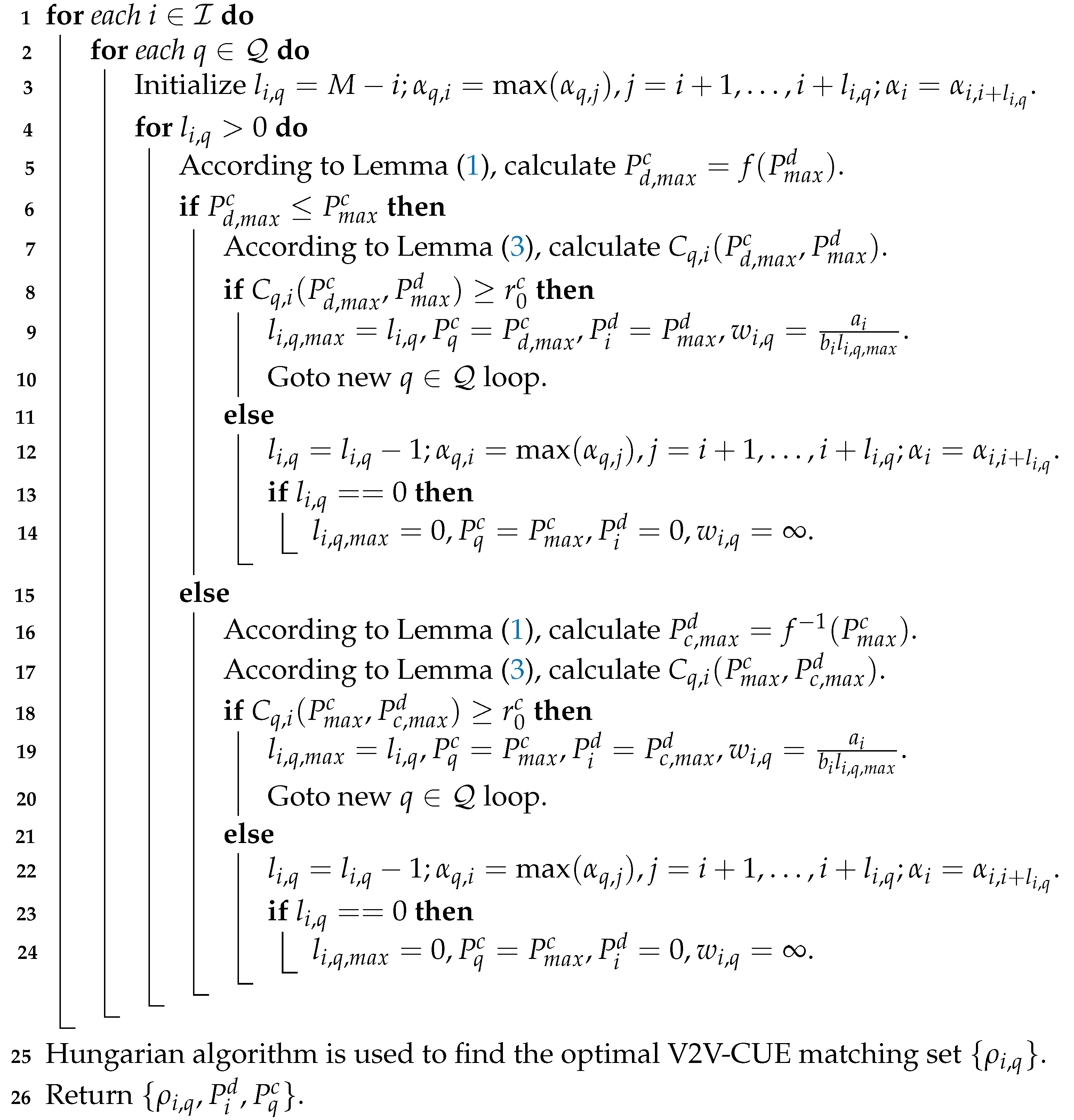 |
5. Simulation Results and Analysis
5.1. Simulation Settings
5.2. Results Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A Survey on Platoon-based Vehicular Cyber-Physical Systems. IEEE Commun. Surv. Tutor. 2016, 18, 263–284. [Google Scholar] [CrossRef] [Green Version]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle Communications in Highway Platooning Scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Network. IEEE Internet Things J. 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- Mazzola, M.; Schaaf, G.; Stamm, A.; Kurner, T. Safety-Critical Driver Assistance Over LTE: Toward Centralized ACC. IEEE Trans. Veh. Technol. 2016, 65, 9471–9478. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Araniti, G.; Berthet, A.O. Better Platooning Control Toward Autonomous Driving: An LTE Device-to-Device Communications Strategy That Meets Ultralow Latency Requirements. IEEE Veh. Technol. Mag. 2017, 12, 30–38. [Google Scholar] [CrossRef] [Green Version]
- Peng, H.; Li, D.; Ye, Q.; Abboud, K.; Zhao, H.; Zhuang, W.; Shen, X. Resource Allocation for Cellular-based Inter-Vehicle Communications in Autonomous Multiplatoons. IEEE Trans. Veh. Technol. 2017, 66, 11249–11263. [Google Scholar] [CrossRef]
- Wen, Q.; Hu, B.J.; Zheng, L. Outage-Constrained Device-to-Device Links Reuse Maximization and Its Application in Platooning. IEEE Wirel. Commun. Lett. 2019, 8, 1635–1638. [Google Scholar] [CrossRef]
- Giambene, G.; Rahman, M.S.; Vinel, A. Analysis of V2V Sidelink Communications for Platoon Applications. In Proceedings of the 2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Hegde, S.; Blume, O.; Shrivastava, R.; Bakker, H. Enhanced Resource Scheduling for Platooning in 5G V2X Systems. In Proceedings of the 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 30 September–2 October 2019; pp. 108–113. [Google Scholar] [CrossRef]
- 3GPP TS 22.186 V16.2.0, Technical Specification Group Services and System Aspects. Service Requirements for Enhanced V2X Scenarios, Release 16. 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 9 September 2021).
- Naus, G.J.L.; Vugts, R.P.A.; Ploeg, J.; Molengraft, M.J.G.; Steinbuch, M. String-Stable CACC Design and Experimental Validation: A Frequency-Domain Approach. IEEE Trans. Veh. Technol. 2010, 59, 4268–4279. [Google Scholar] [CrossRef]
- Ge, J.I.; Orosz, G. Optimal Control of Connected Vehicle Systems with Communication Delay and Driver Reaction Time. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2056–2070. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning with IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic Flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Caveney, D.S. Distributed Receding Horizon Control of Vehicle Platoons: Stability and String Stability. IEEE Trans. Automat. Control 2012, 57, 620–633. [Google Scholar] [CrossRef]
- Liu, P.; Kurt, A.; Ozguner, U. Distributed Model Predictive Control for Cooperative and Flexible Vehicle Platooning. IEEE Trans. Control Syst. Technol. 2019, 27, 1115–1128. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed Model Predictive Control for Heterogeneous Vehicle Platoons Under Unidirectional Topologies. IEEE Trans. Control Syst. Technol. 2017, 25, 899–910. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; He, D.; Yu, S.; Dong, S. Distributed Predictive Control for String Stability of Heterogonous Vehicle Platoons with Multiple Communication Topologies. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 2930–2935. [Google Scholar] [CrossRef]
- Li, K.; Bian, Y.; Li, S.; Xu, B.; Wang, J. Distributed Model Predictive Control of Multi-Vehicle Systems with Switching Communication Topologies. Transp. Res. Part C Emerg. Technol. 2020, 118, 102717. [Google Scholar] [CrossRef]
- Tapli, T.; Kiran, U. A Modified Distributed Model Predictive Control Approach for Handling Vehicular Platoon Communication Problems. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Turri, V.; Besselink, B.; Johansson, K.H. Cooperative Look-Ahead Control for Fuel-Efficient and Safe Heavy-Duty Vehicle Platooning. IEEE Trans. Control Syst. Technol. 2017, 25, 12–28. [Google Scholar] [CrossRef] [Green Version]
- Zhai, C.; Liu, Y.; Luo, F. A Switched Control Strategy of Heterogeneous Vehicle Platoon for Multiple Objectives with State Constraints. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1883–1896. [Google Scholar] [CrossRef]
- Zhai, C.; Luo, F.; Liu, Y. Cooperative Look-Ahead Control of Vehicle Platoon for Maximizing Fuel Efficiency Under System Constraints. IEEE Access 2018, 6, 37700–37714. [Google Scholar] [CrossRef]
- Zhai, C.; Luo, F.; Liu, Y. Cooperative Look-Ahead Control of Vehicle Platoon Travelling on A Road with Varying Slopes. IET Intell. Transp. Syst. 2019, 13, 376–384. [Google Scholar] [CrossRef]
- Zhai, C.; Luo, F.; Liu, Y.; Chen, Z. Ecological Cooperative Look-Ahead Control for Automated Vehicles Travelling on Freeways with Varying Slopes. IEEE Trans. Veh. Technol. 2019, 69, 1208–1221. [Google Scholar] [CrossRef]
- Zhai, C.; Chen, X.; Yan, C.; Liu, Y.; Li, H. Ecological Cooperative Adaptive Cruise Control for a Heterogeneous Platoon of Heavy-Duty Vehicles with Time Delays. IEEE Access 2020, 8, 146208–146219. [Google Scholar] [CrossRef]
- Zhai, C.; Luo, F.; Liu, Y. Cooperative Power Split Optimization for a Group of Intelligent Electric Vehicles Travelling on a Highway with Varying Slopes. IEEE Trans. Intell. Transp. Syst. 2020, in press. [Google Scholar] [CrossRef]
- Mei, J.; Zheng, K.; Zhao, L.; Lei, L.; Wang, X. Joint Radio Resource Allocation and Control for Vehicle Platooning in LTE-V2V Network. IEEE Trans. Veh. Technol. 2018, 67, 12218–12230. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Joint Communication and Control for Wireless Autonomous Vehicular Platoon Systems. IEEE Trans. Commun. 2019, 67, 7907–7922. [Google Scholar] [CrossRef] [Green Version]
- Hong, C.; Shan, H.; Song, M.; Zhuang, W.; Xiang, Z.; Wu, Y.; Yu, X. A Joint Design of Platoon Communication and Control Based on LTE-V2V. IEEE Trans. Veh. Technol. 2020, 69, 15893–15907. [Google Scholar] [CrossRef]
- Gonçalves, T.R.; Varma, V.S.; Elayoubi, S.E. Vehicle Platooning Schemes Considering V2V Communications: A Joint Communication/Control Approach. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sciarretta, A.; Nunzio, G.; Ojeda, L.L. Optimal Ecodriving Control: Energy-Efficient Driving of Road Vehicles as an Optimal Control Problem. IEEE Control Syst. 2015, 35, 71–90. [Google Scholar] [CrossRef] [Green Version]
- He, C.R.; Maurer, H.; Orosz, G. Fuel Consumption Optimization of Heavy-Duty Vehicles with Grade, Wind, and Traffic Information. J. Comput. Nonlinear Dyn. 2016, 11, 1–12. [Google Scholar] [CrossRef] [Green Version]
- He, C.R.; Orosz, G. Saving Fuel Using Wireless Vehicle-to-Vehicle Communication. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4946–4951. [Google Scholar] [CrossRef]
- He, C.R.; Ge, J.I.; Orosz, G. Fuel Efficient Connected Cruise Control for Heavy-Duty Trucks in Real Traffic. IEEE Trans. Control Syst. Technol. 2019, 28, 2474–2481. [Google Scholar] [CrossRef]
- Chehardoli, H.; Ghasemi, A.; Najafi, A. Centralized and Decentralized Distributed Control of Longitudinal Vehicular Platoons with Non-Uniform Communication Topology. Asian J. Control 2019, 21, 2691–2699. [Google Scholar] [CrossRef]
- Wang, Y.; Boyd, S. Fast Model Predictive Control Using Online Optimization. IEEE Trans. Control Syst. Technol. 2010, 18, 267–278. [Google Scholar] [CrossRef] [Green Version]
- Find Minimum of Constrained Nonlinear Multivariable Function. Available online: https://www.mathworks.com/help/optim/ug/fmincon.html (accessed on 9 September 2021).
- Liang, L.; Li, G.Y.; Xu, W. Resource Allocation for D2D-Enabled Vehicular Communications. IEEE Trans. Commun. 2017, 65, 3186–3197. [Google Scholar] [CrossRef]
- West, D.B. Introduction to Graph Theory, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001; pp. 125–130. [Google Scholar]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics: Data Models and Simulation; Springer: Berlin, Germany, 2013; pp. 187–204. [Google Scholar] [CrossRef]
- 3GPP TR 36.885 V14.0.0, Technical Specification Group Radio Access Network. Study on LTE-Based V2X Services, Release 14. 2016. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2934 (accessed on 22 September 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The total simulation time | 35 s |
| The number of vehicles in the platoon | 10 |
| Discrete time interval | 100 ms |
| Vehicle mass | 1800 kg |
| Mechanical efficiency | 0.96 |
| Tire radius | 0.45 m |
| Lumped aerodynamic drag coefficient | 1.3 (N·s·m) |
| Rolling resistance coefficient | 0.01 |
| Gravity constant g | 9.8 m/s |
| −7200 N, 7200 N | |
| Allowed maximum velocity | 30 m/s |
| m/s, 4 m/s, −1 m/s | |
| 6 m/s | |
| Predictive horizon | 5 |
| Weighting factor | 1, 20 |
| , 1, 20 | |
| Fuel consumption rate | 0.113 g/s |
| Efficiency of fuel | 13,000 J/g |
| Time headway h | 0.5 s |
| 1 | |
| 10 | |
| Carrier frequency/Bandwidth | 2 GHz/10 MHz |
| 23 dBm, 23 dBm | |
| BS antenna height | 25 m |
| BS antenna gain | 8 dBi |
| BS receiver noise figure | 5 dB |
| Vehicle antenna gain | 3 dBi |
| Vehicle antenna height | 1.5 m |
| Vehicle receiver noise figure | 9 dB |
| Noise power | −114 dBm |
| Minimum ergodic capacity for CUE | 0.5 bps/Hz |
| SINR threshold for V2V links | 5 dB |
| Reliability for V2V links | 0.01 |
| Bisection search accuracy | |
| Pathloss model of V2V link | WINNER + B1 LOS |
| Pathloss model of uplink | d in km |
| Shadowing distribution | Log-normal |
| Shadowing standard deviation of V2V link | 3 dB |
| Shadowing standard deviation of uplink | 8 dB |
| Fast fading | Rayleigh fading |
| PM | 100 | 300 | 500 | 100 | 300 | 500 | 100 | 300 | 500 | 100 | 300 | 500 (ms) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.99 | 0.98 | 0.94 | 0.98 | 0.99 | 0.97 | 0.98 | 0.97 | 0.96 | 0.98 | 0.98 | 0.97 |
| 2 | 1.90 | 1.86 | 1.83 | 1.88 | 1.83 | 1.81 | 1.81 | 1.79 | 1.73 | 1.80 | 1.70 | 1.75 |
| 3 | 2.79 | 2.72 | 2.72 | 2.74 | 2.69 | 2.64 | 2.61 | 2.56 | 2.53 | 2.63 | 2.51 | 2.55 |
| 4 | 3.68 | 3.54 | 3.51 | 3.58 | 3.45 | 3.45 | 3.43 | 3.40 | 3.36 | 3.36 | 3.21 | 3.24 |
| 5 | 4.55 | 4.33 | 4.33 | 4.39 | 4.22 | 4.25 | 4.21 | 4.08 | 4.04 | 4.00 | 3.75 | 3.80 |
| 6 | 5.35 | 5.03 | 5.08 | 5.12 | 4.89 | 4.97 | 4.83 | 4.68 | 4.64 | 4.44 | 4.20 | 4.32 |
| 7 | 6.11 | 5.73 | 5.79 | 5.84 | 5.53 | 5.56 | 5.28 | 5.07 | 5.03 | 4.67 | 4.20 | 4.46 |
| 8 | 6.71 | 6.32 | 6.32 | 6.28 | 5.93 | 5.98 | 5.42 | 5.17 | 5.11 | 4.69 | 4.33 | 4.55 |
| 9 | 7.14 | 6.73 | 6.75 | 6.42 | 6.00 | 6.06 | 5.48 | 5.18 | 5.14 | 4.75 | 4.33 | 4.57 |
| Resource Allocation Update Period | ||||
|---|---|---|---|---|
| 100 ms | 443.80 g | 442.97 g | 445.74 g | 444.60 g |
| 300 ms | 443.80 g | 444.76 g | 444.56 g | 446.61 g |
| 500 ms | 445.24 g | 443.44 g | 446.03 g | 445.67 g |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Q.; Hu, B.-J. Integrated Communication and Control Design for Fuel-Efficient Vehicle Platooning. Electronics 2021, 10, 3117. https://doi.org/10.3390/electronics10243117
Wen Q, Hu B-J. Integrated Communication and Control Design for Fuel-Efficient Vehicle Platooning. Electronics. 2021; 10(24):3117. https://doi.org/10.3390/electronics10243117
Chicago/Turabian StyleWen, Qingji, and Bin-Jie Hu. 2021. "Integrated Communication and Control Design for Fuel-Efficient Vehicle Platooning" Electronics 10, no. 24: 3117. https://doi.org/10.3390/electronics10243117
APA StyleWen, Q., & Hu, B.-J. (2021). Integrated Communication and Control Design for Fuel-Efficient Vehicle Platooning. Electronics, 10(24), 3117. https://doi.org/10.3390/electronics10243117