
An Improved Initialization Method for Monocular Visual-Inertial SLAM


Abstract
:1. Introduction
- An ideal hypothesis in which all features are tracked in perspective should be contented. However, it can lead to bad solutions under conditions of spurious tracks.
- Compared with [19], the disjoint visual-inertial initialization method, the accuracy of the joint method is lower. To improve it, a lot of frames and tracks are usually added, which leads to the computational cost being so high that the real-time performance is unfeasible.
- The method in [17] works only at 20% of trajectory points. If the system requires to be started immediately, this may be a problem in robot use.
- The process of initial estimation is slow and unstable. On account of the inertial parameters being evaluated through solving a set of the linear equations in various steps utilizing the least square method, it requires an excellent iterative strategy that makes fast convergence. However, the convergence speed in [11] is not reliable enough for all variables estimation. it can be a problem for many real applications.
- Initialization is fragile. As the method requires running monocular visual SLAM in advance for finding the accurate inertial parameters. If the visual part gets lost, the inertial system will not be launched immediately.
2. Preliminaries
2.1. Notation
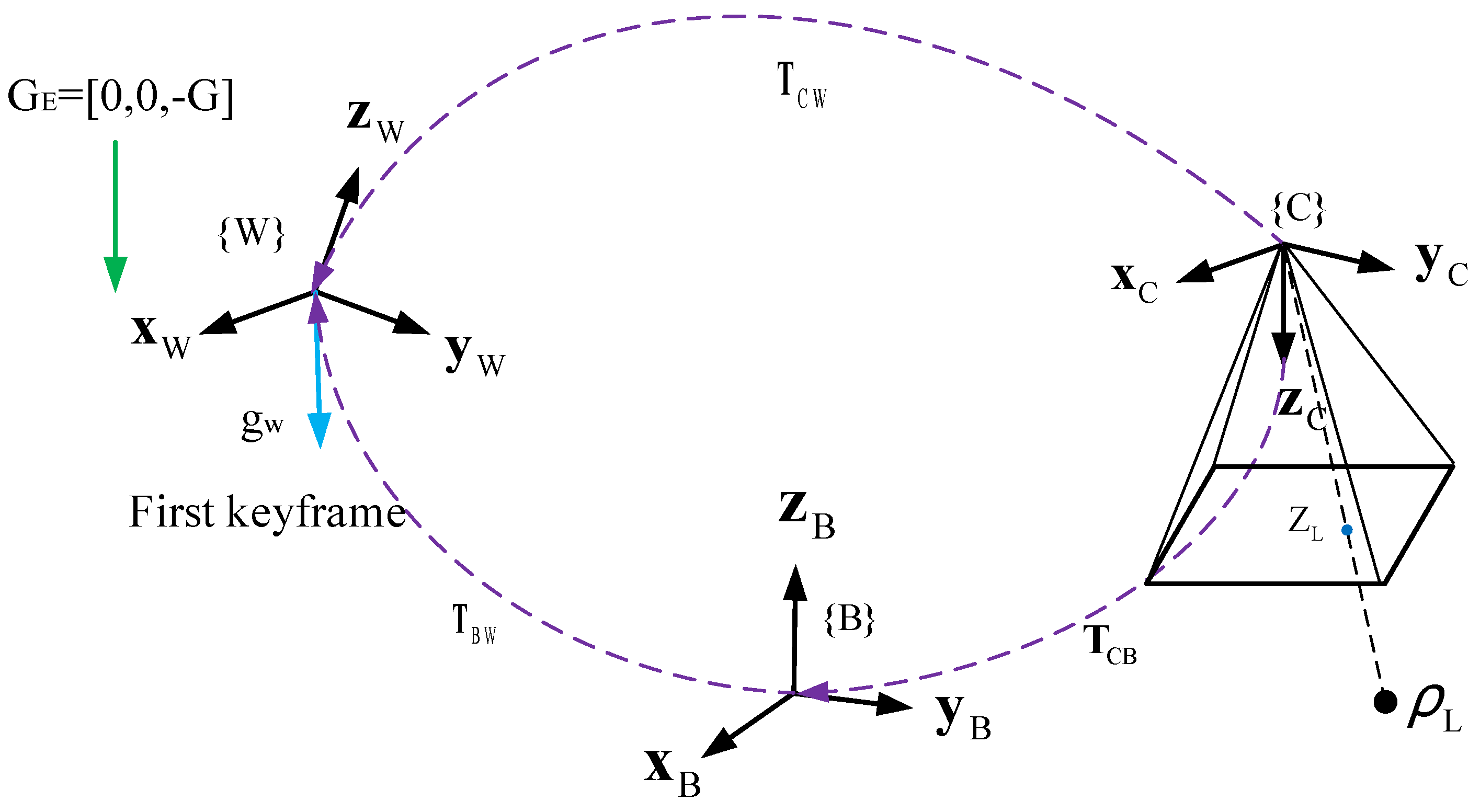
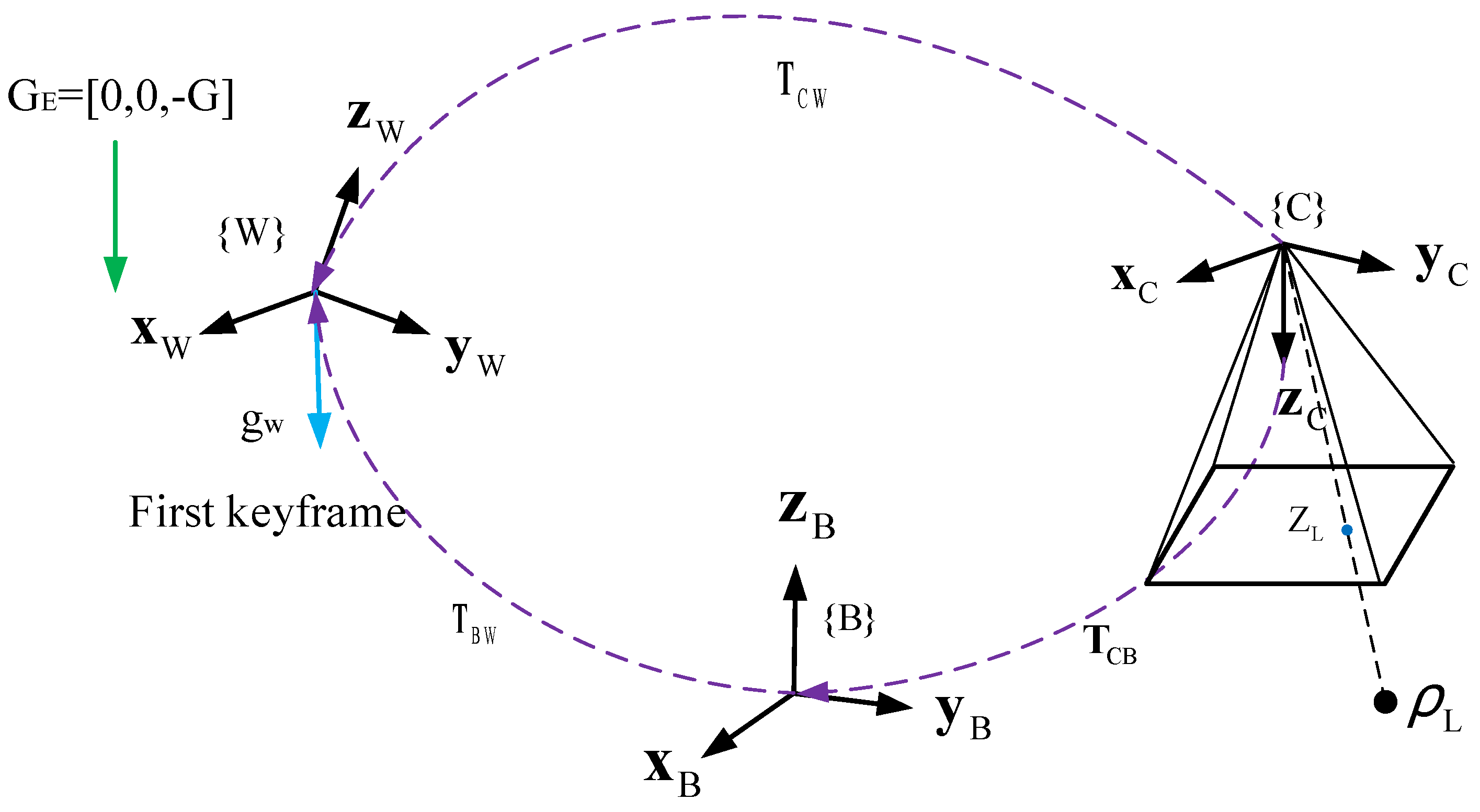
2.2. Coordinate Frames
2.3. Visual Measurement Model
2.4. IMU Pre-Integration
3. IMU Initialization
3.1. Gyroscope Bias Estimation
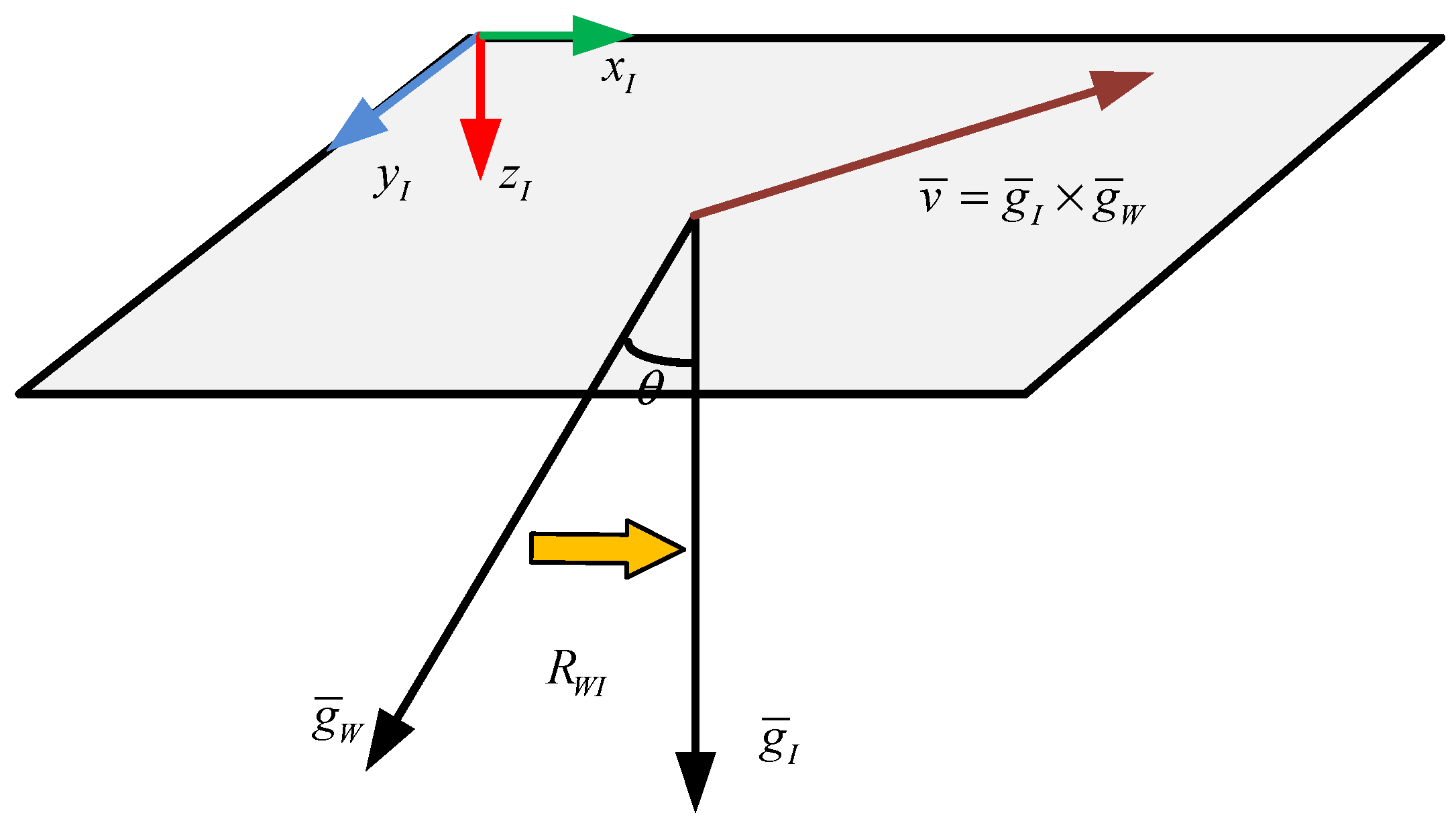
3.2. Gravity Direction Estimation
3.3. Improved Iterative Strategy
| Algorithm 1 Improved iterative strategy |
| 1: Set the initial x0 and radius of the trust region |
| 2: Solve the optimal problem: |
| 3: |
| 4: Calculate : |
| 5: |
| 6: Update , if |
| 7: |
| 8: else if |
| 9: . |
| 10: If met the iteration termination condition, i.e., or |
| 11: or |
| 12: then iteration stops; |
| 13: if not met, then , go back to step 2. |
3.4. Accelerometer Bias and Scale Estimation
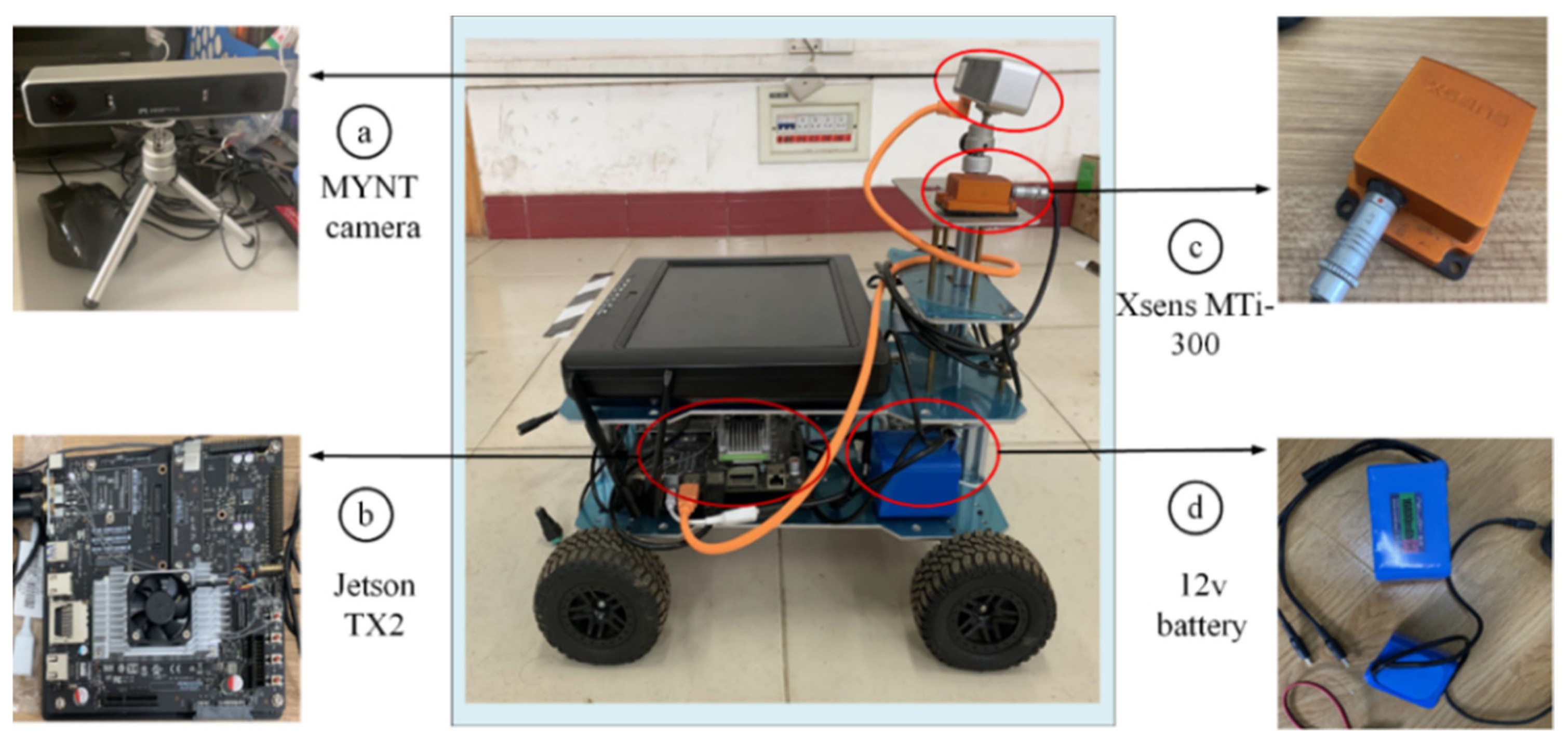
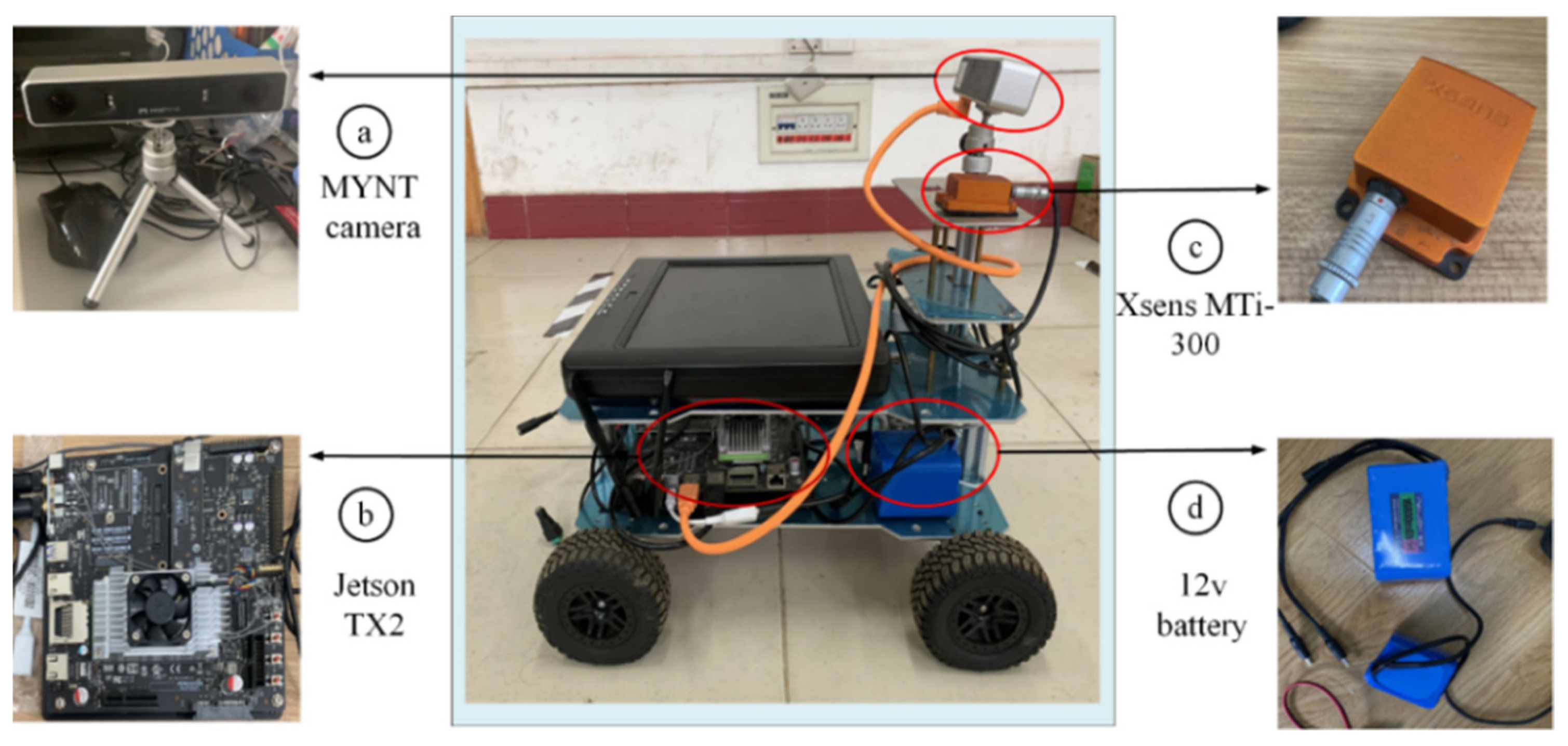
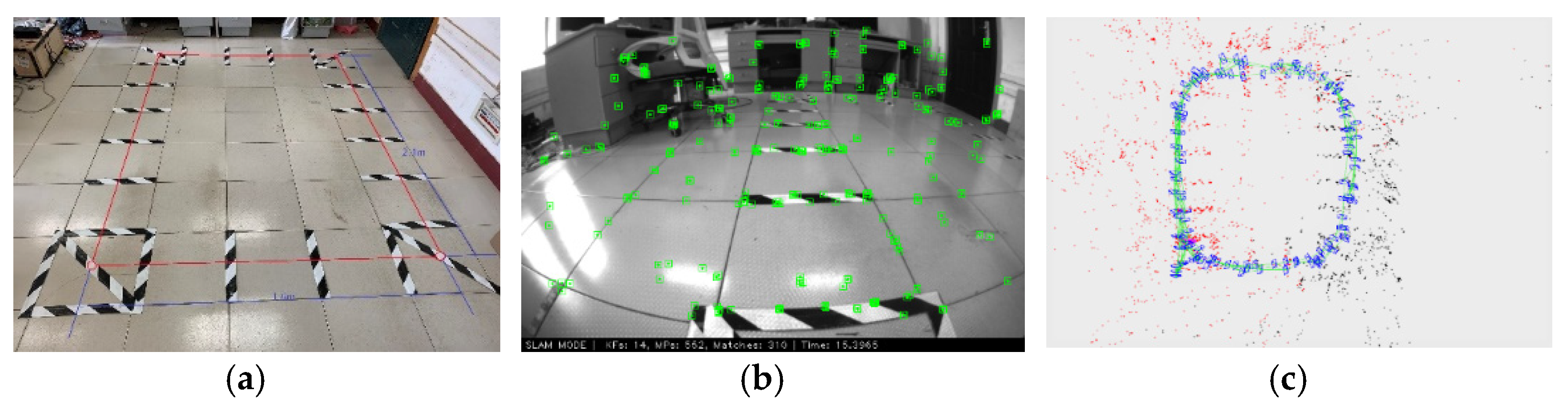
4. Experiments
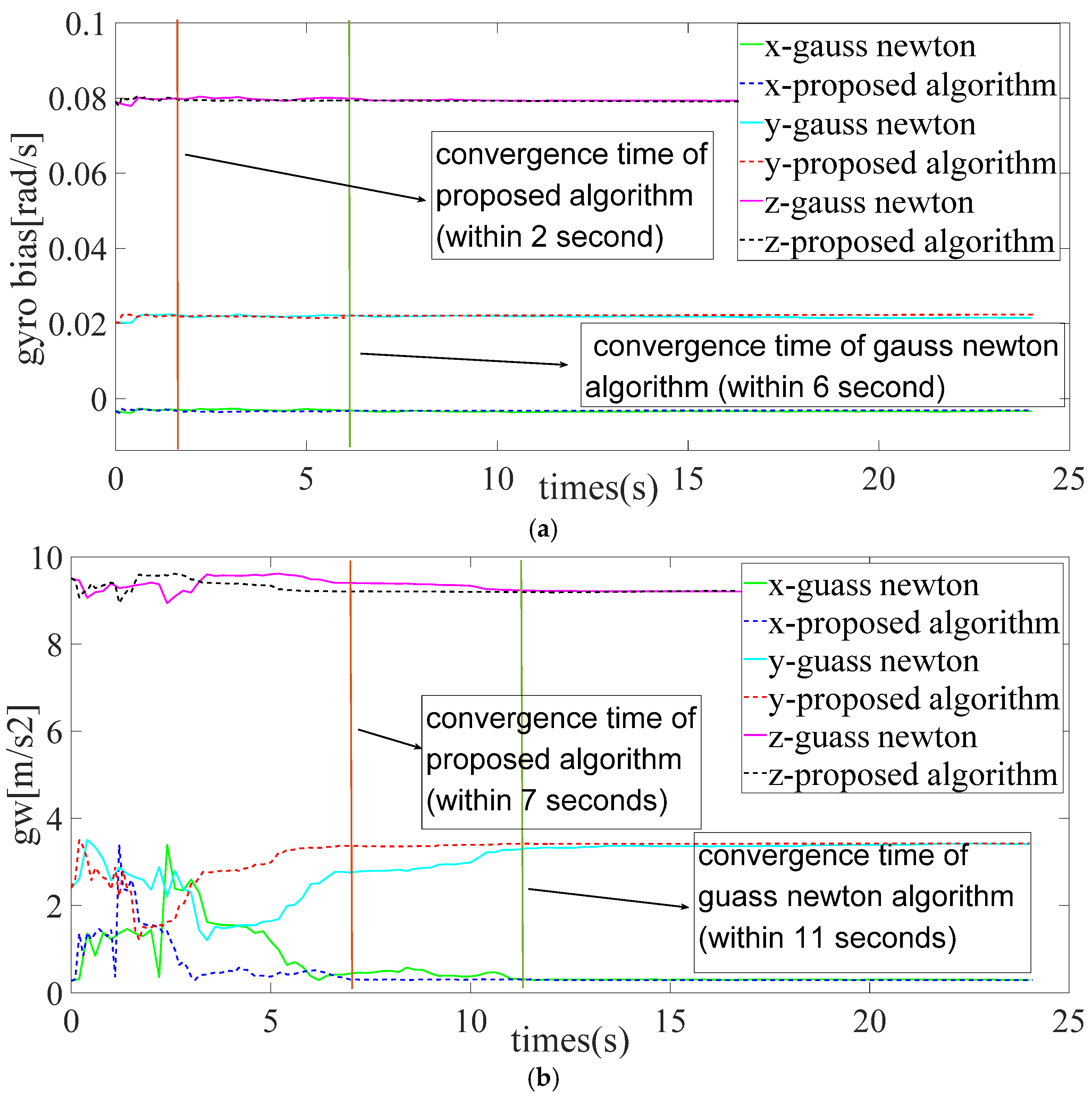
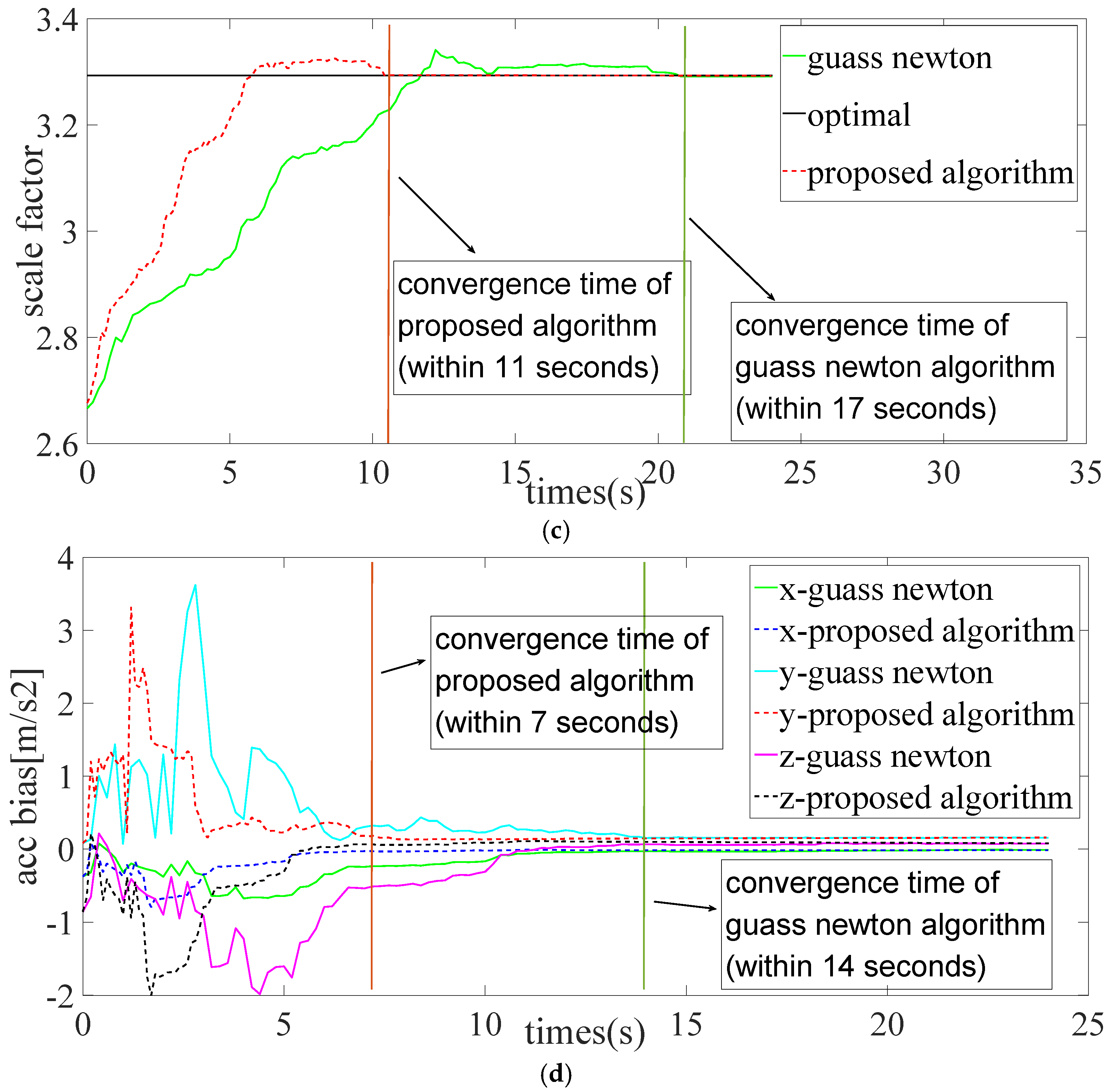
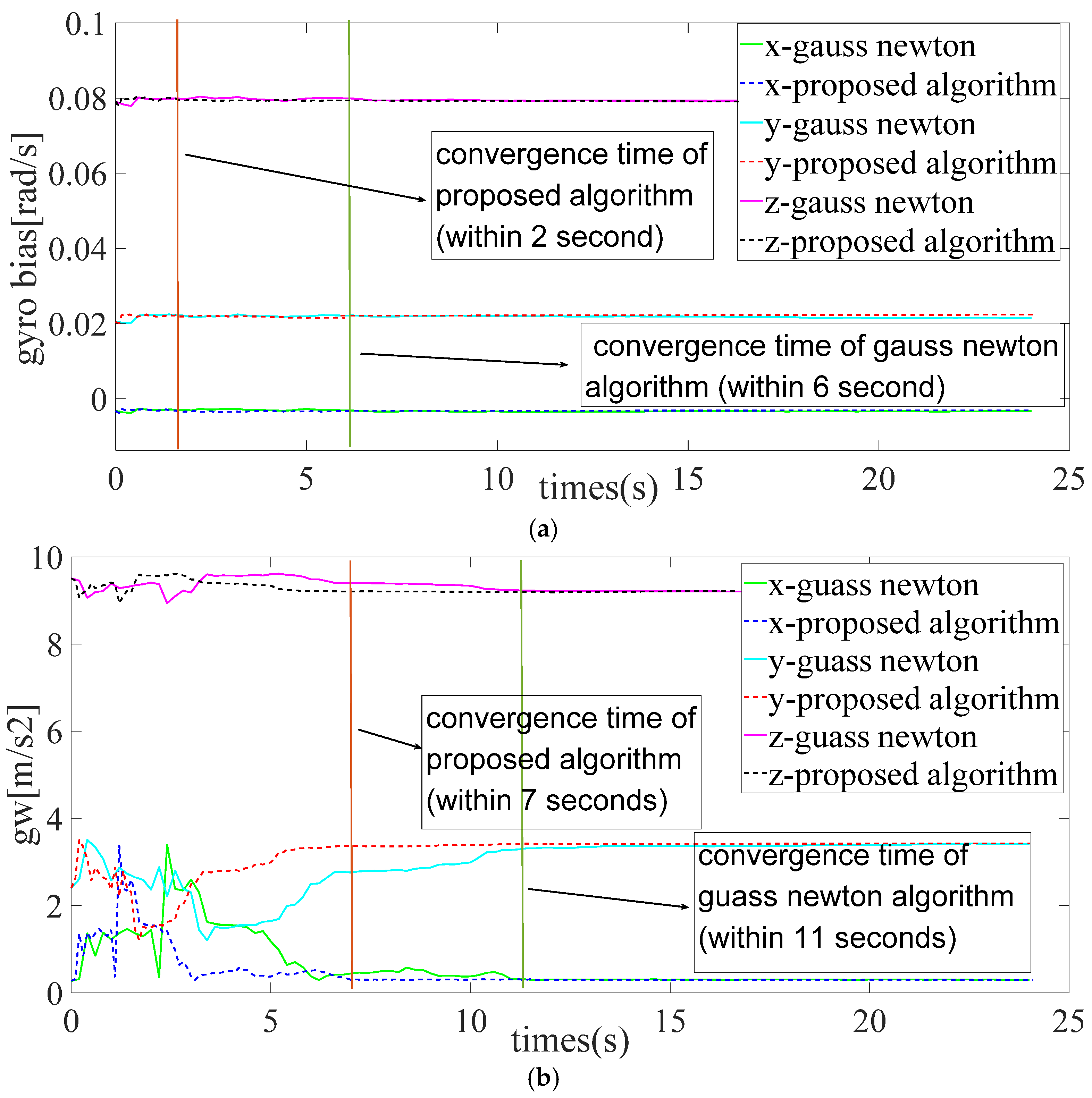
4.1. Evaluation of the Initial Estimation
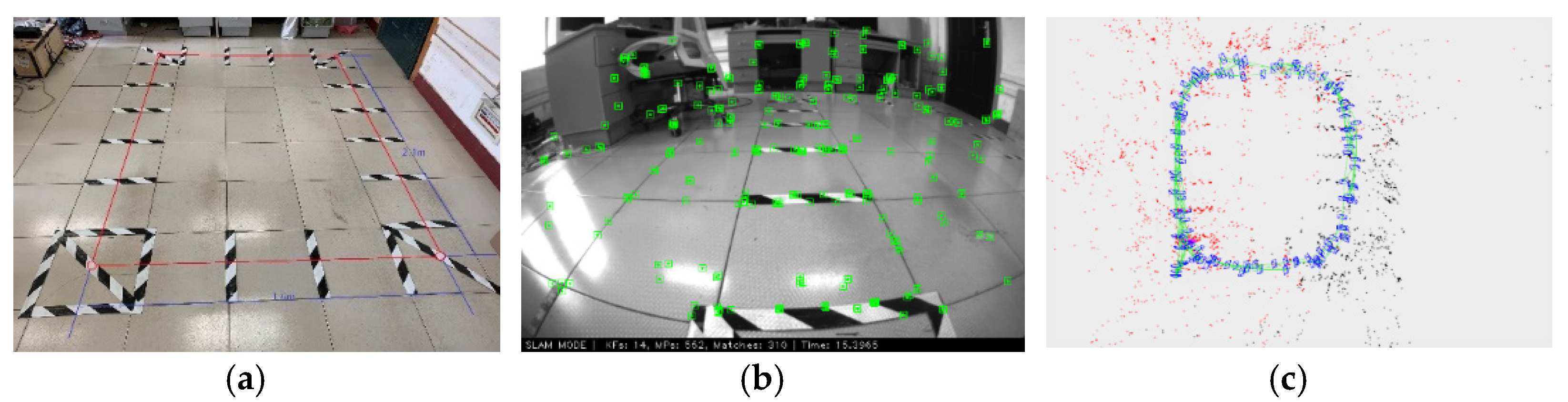
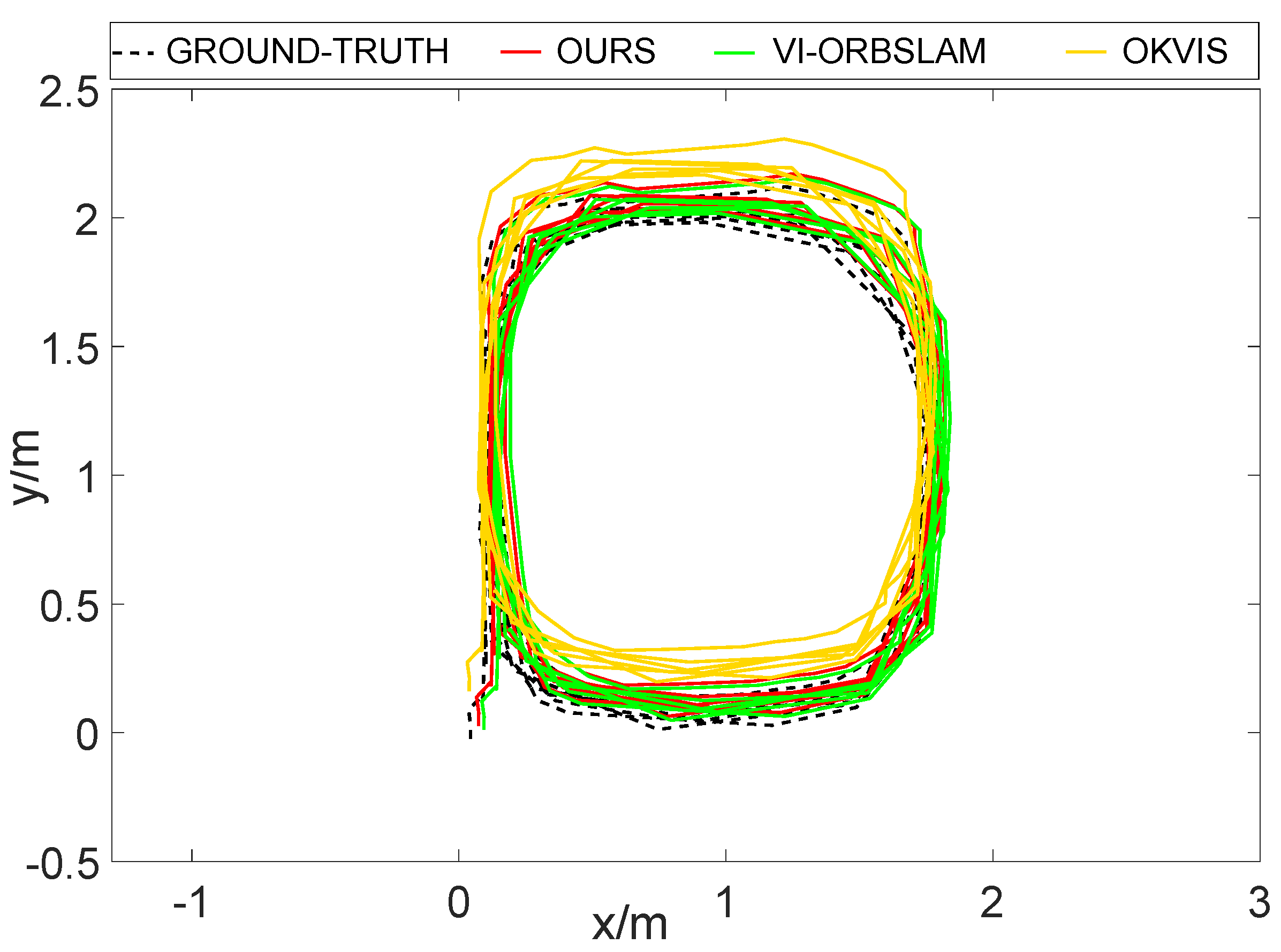
4.2. Evaluation of the Tracking Accuracy and Computational Complexity
- (1)
- RMSE error of position:where, denote the estimation of position with x, y, z-axis, denote the true position with x, y, and z-axis, respectively.
- (2)
- RMSE errors of orientation:where, denote the estimation of orientation with x, y, z-axis, denote the true orientation with x, y and z-axis, respectively.
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, Y.; Gao, F.; Qin, T.; Gao, W.; Liu, T.; Wu, W.; Yang, Z.; Shen, S. Autonomous aerial navigation using monocular visual-inertial fusion. J. Field Robot. 2018, 35, 23–51. [Google Scholar] [CrossRef]
- Bloesch, M.; Omari, S.; Hutter, M.; Siegwart, R. Robust visual inertial odometry using a direct EKF-based approach. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 298–304. [Google Scholar]
- Taragay, O.; Supun, S.; Rakesh, K. Multi-sensor navigation algorithm using monocular camera, IMU and GPS for large scale augmented reality. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality, Atlanta, GA, USA, 5–8 November 2012; pp. 71–80. [Google Scholar]
- Li, P.; Qin, T.; Hu, B.; Zhu, F.; Shen, S. Monocular visual-inertial state estimation for mobile augmented reality. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Nantes, France, 9–13 October 2017; pp. 11–21. [Google Scholar]
- Fascista, A.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. Downlink Single-Snapshot Localization and Mapping with a Single-Antenna Receiver. IEEE Trans. Wirel. Commun. 2021, 20, 4672–4684. [Google Scholar] [CrossRef]
- Ge, Y.; Wen, F.; Kim, H.; Zhu, M.; Jiang, F.; Kim, S.; Svensson, L.; Wymeersch, H. 5G SLAM Using the Clustering and Assignment Approach with Diffuse Multipath. Sensors 2020, 20, 4656. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Zhao, J.; Liu, J. A Survey of Simultaneous Localization and Mapping with an Envision in 6G Wireless Networks. arXiv 2020, arXiv:1909.05214. [Google Scholar]
- Chen, C.; Zhu, H.; Li, M.; You, S. A Review of Visual-Inertial Simultaneous Localization and Mapping from Filtering-Based and Optimization-Based Perspectives. Robotics 2018, 7, 45. [Google Scholar] [CrossRef] [Green Version]
- Fascista, A.; Coluccia, A.; Ricci, G. A Pseudo Maximum Likelihood Approach to Position Estimation in Dynamic Multipath Environments. Signal Process. 2021, 181, 707907. [Google Scholar] [CrossRef]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual-inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Murartal, R.; Tardos, J.D. Visual-Inertial Monocular SLAM with Map Reuse. IEEE Robot. Autom. Lett. 2017, 2, 796–803. [Google Scholar] [CrossRef] [Green Version]
- Von Stumberg, L.; Usenko, V.; Cremers, D. Direct Sparse Visual-Inertial Odometry Using Dynamic Marginalization. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 2510–2517. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Campos, C.; Montiel, J.M.; Tardos, J.D. Inertial-Only Optimization for Visual-Inertial Initialization. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 51–57. [Google Scholar]
- Martinelli, A. Closed-form solution of visual-inertial structure from motion. Int. J. Comput. Vis. 2014, 106, 138–152. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, J.; Martinelli, A.; Fontana, F.; Scaramuzza, D. Simultaneous state initialization and gyroscope bias calibration in visual inertial aided navigation. IEEE Robot. Autom. Lett. 2016, 2, 18–25. [Google Scholar] [CrossRef] [Green Version]
- Campos, C.; Montiel, J.M.M.; Tardos, J.D. Fast and Robust Initialization for Visual-Inertial SLAM. In Proceedings of the 2019 International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 1288–1294. [Google Scholar]
- Burri, M.; Nikolic, J.; Gohl, P.; Schneider, T.; Rehder, J.; Omari, S.; Achtelik, M.W.; Siegwart, R. The EuRoC micro aerial vehicle datasets. Int. J. Robot. Res. 2016, 35, 1157–1163. [Google Scholar] [CrossRef]
- Murartal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Qin, T.; Shen, S. Robust initialization of monocular visual-inertial estimation on aerial robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems IEEE, Vancouver, BC, Canada, 24–28 September 2017; pp. 4225–4232. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation. In Proceedings of the 2015 Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; pp. 1–20. [Google Scholar]
- Murartal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Lupton, T.; Sukkarieh, S. Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments without Initial Conditions. IEEE Trans. Robot. 2012, 28, 61–76. [Google Scholar] [CrossRef]
- Rehder, J.; Nikolic, J.; Schneider, T.; Hinzmann, T.; Siegwart, R. Extending kalibr: Calibrating the extrinsics of multiple IMUs and of individual axes. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 4304–4311. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Pros | Cons | Typical Studies |
|---|---|---|---|
| Joint method |
|
| Martinelli, A. [15,16] Campos, C. [17] |
| Disjoint method |
|
| Murata, R. [11] |
| Version | S1030-IR-120 |
|---|---|
| Size | 165 mm × 31.5 mm × 31.23 mm |
| Weight | 184 g |
| Frames per Second | 10–60 FPS |
| Resolution | 752 × 480; 376 × 240 |
| FHD | 6.0 × 6.0 um |
| Baseline | 120.0 mm |
| Focal length | 2.1 mm |
| Power dissipation | 1–2.7 W @ 5 v DC |
| IMU frequency | 100–500 Hz |
| Exposure mode | Global shutter |
| Measuring Depth | 0.8–5 m+ |
| Interface | USB 3.0 |
| Calibration Parameters | |
|---|---|
| } | |
| VI-ORBSLAM (Monocular) | OKVIS (Binocular) | OURS | ||||
|---|---|---|---|---|---|---|
| Pos (m) | Ori (°) | Pos (m) | Ori (°) | Pos (m) | Ori (°) | |
| X | 0.150 | 1.356 | 0.103 | 1.539 | 0.091 | 1.032 |
| Y | 0.125 | 1.165 | 0.228 | 1.374 | 0.115 | 1.134 |
| Z | 0.133 | 1.987 | 0.152 | 3.060 | 0.123 | 1.857 |
| VI-ORBSLAM (Monocular) | OKVIS (Binocular) | OURS | |
|---|---|---|---|
| CPU Usage (%) | 192 | 175 | 113 |
| Memory Usage (%) | 9.1 | 7.3 | 7.0 |
| Process Times (ms) | 51 | 34 | 29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, J.; Zhang, L.; Chen, Q. An Improved Initialization Method for Monocular Visual-Inertial SLAM. Electronics 2021, 10, 3063. https://doi.org/10.3390/electronics10243063
Cheng J, Zhang L, Chen Q. An Improved Initialization Method for Monocular Visual-Inertial SLAM. Electronics. 2021; 10(24):3063. https://doi.org/10.3390/electronics10243063
Chicago/Turabian StyleCheng, Jun, Liyan Zhang, and Qihong Chen. 2021. "An Improved Initialization Method for Monocular Visual-Inertial SLAM" Electronics 10, no. 24: 3063. https://doi.org/10.3390/electronics10243063
APA StyleCheng, J., Zhang, L., & Chen, Q. (2021). An Improved Initialization Method for Monocular Visual-Inertial SLAM. Electronics, 10(24), 3063. https://doi.org/10.3390/electronics10243063