
HYDRA: Introducing a Low-Cost Framework for STEM Education Using Open Tools


 , ,
, ,  and
and 
Abstract
:1. Introduction
Summary of Contribution
2. The Proposed System
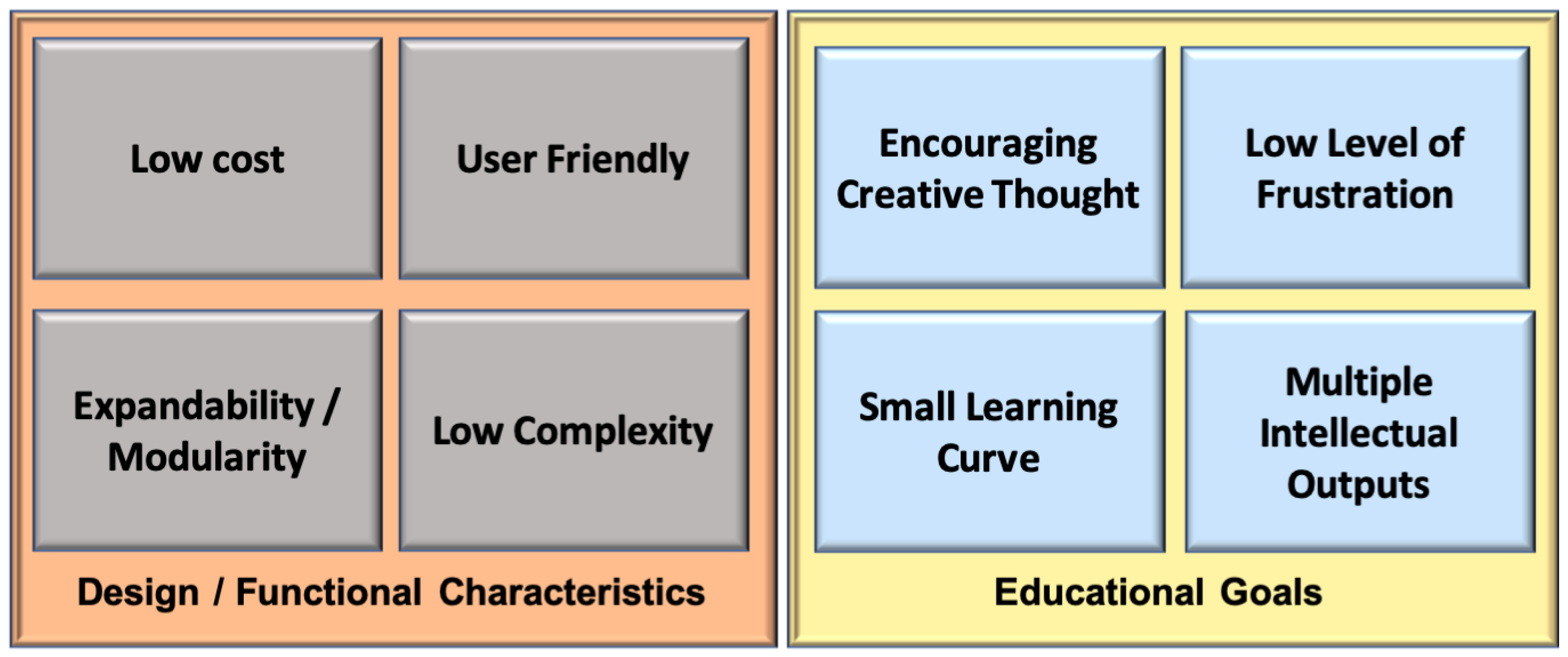
2.1. Motivation
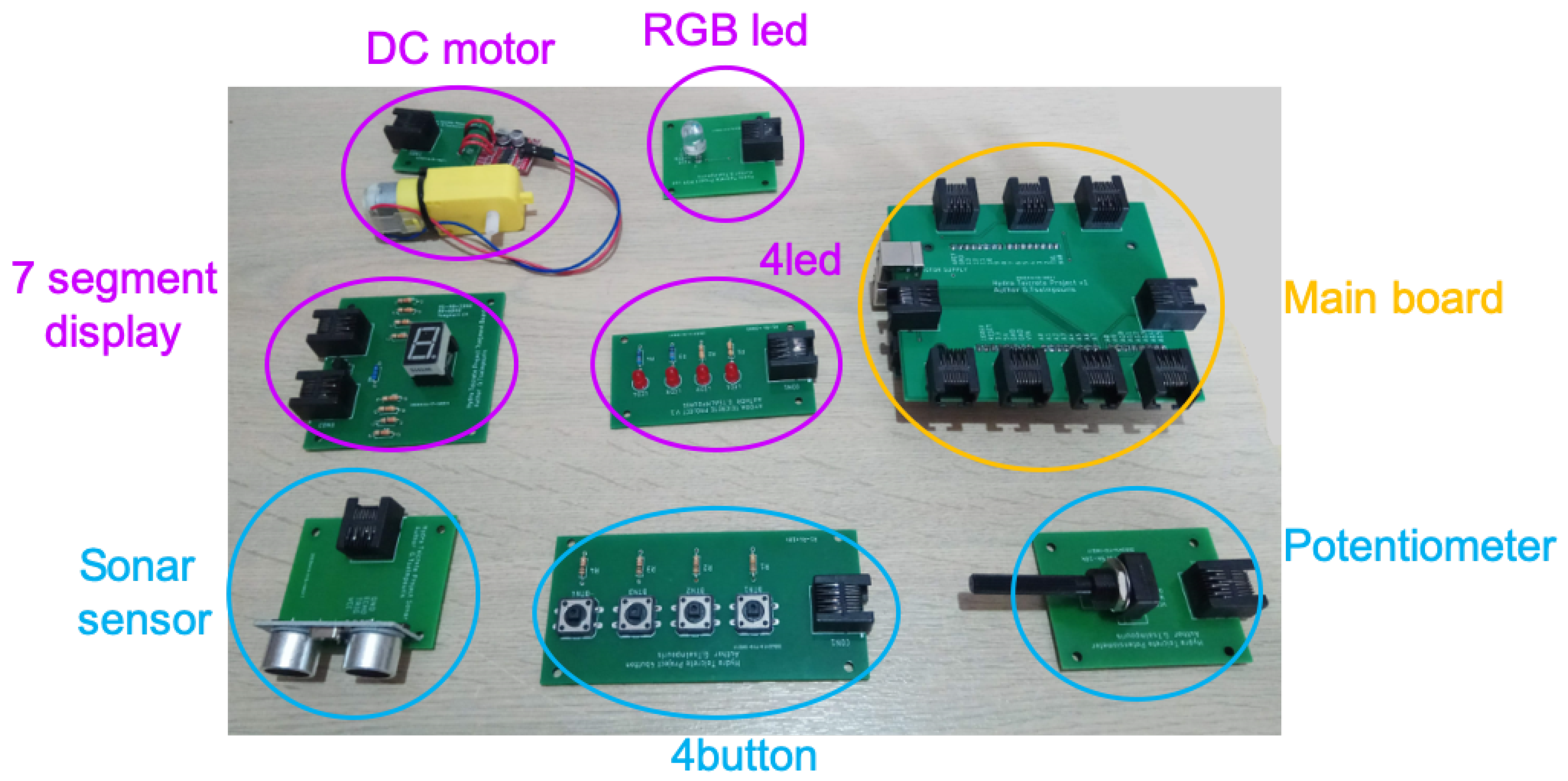
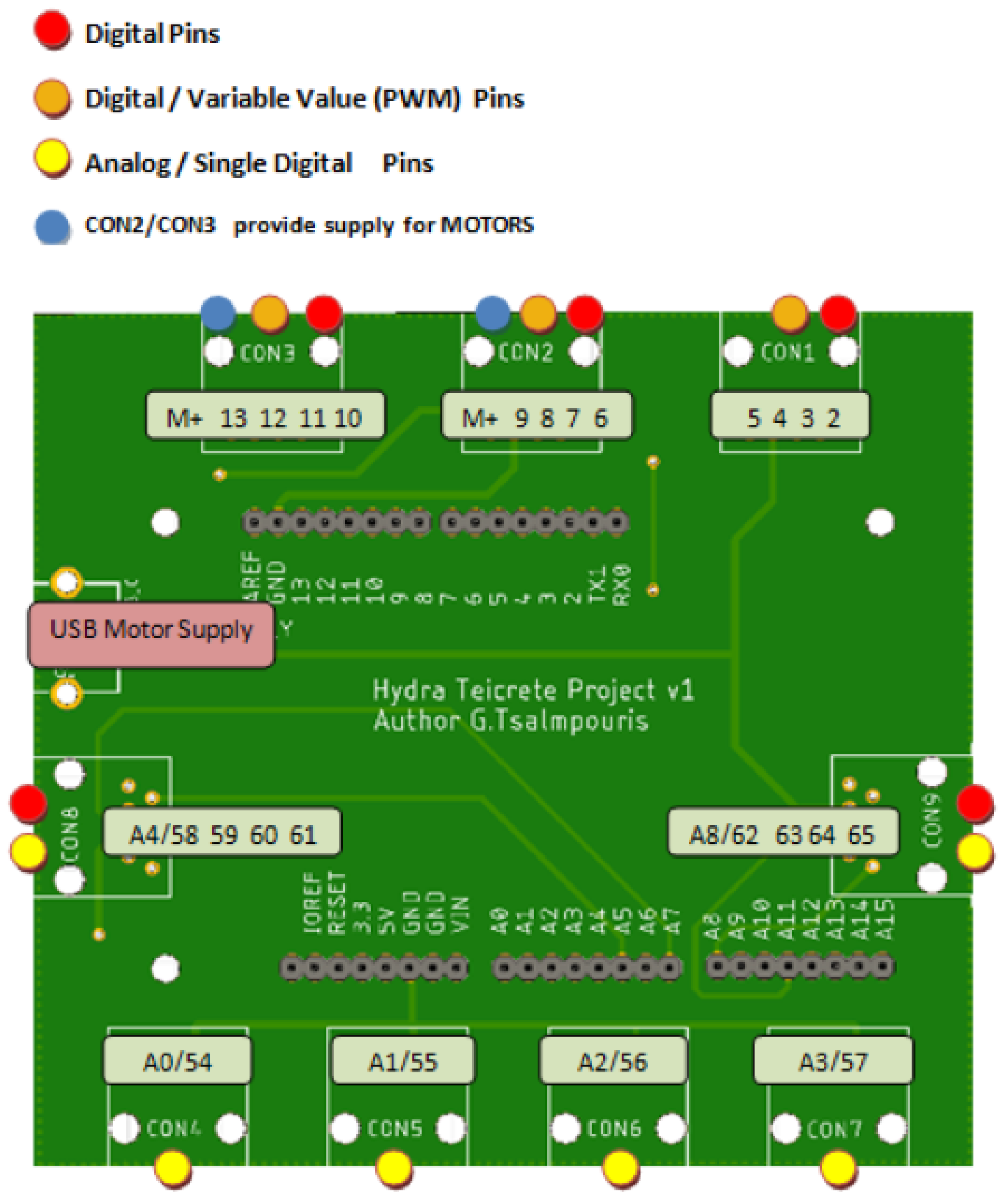
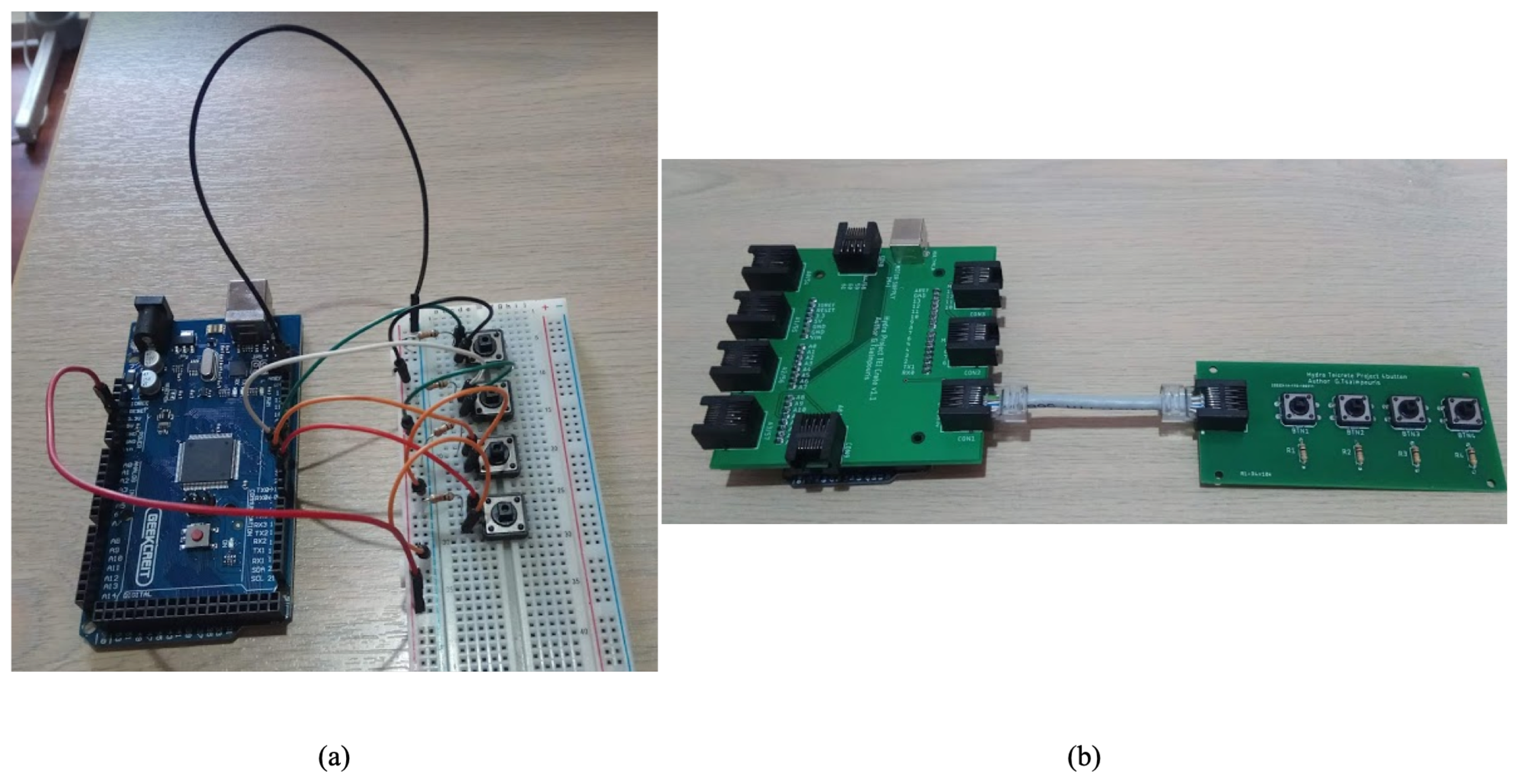
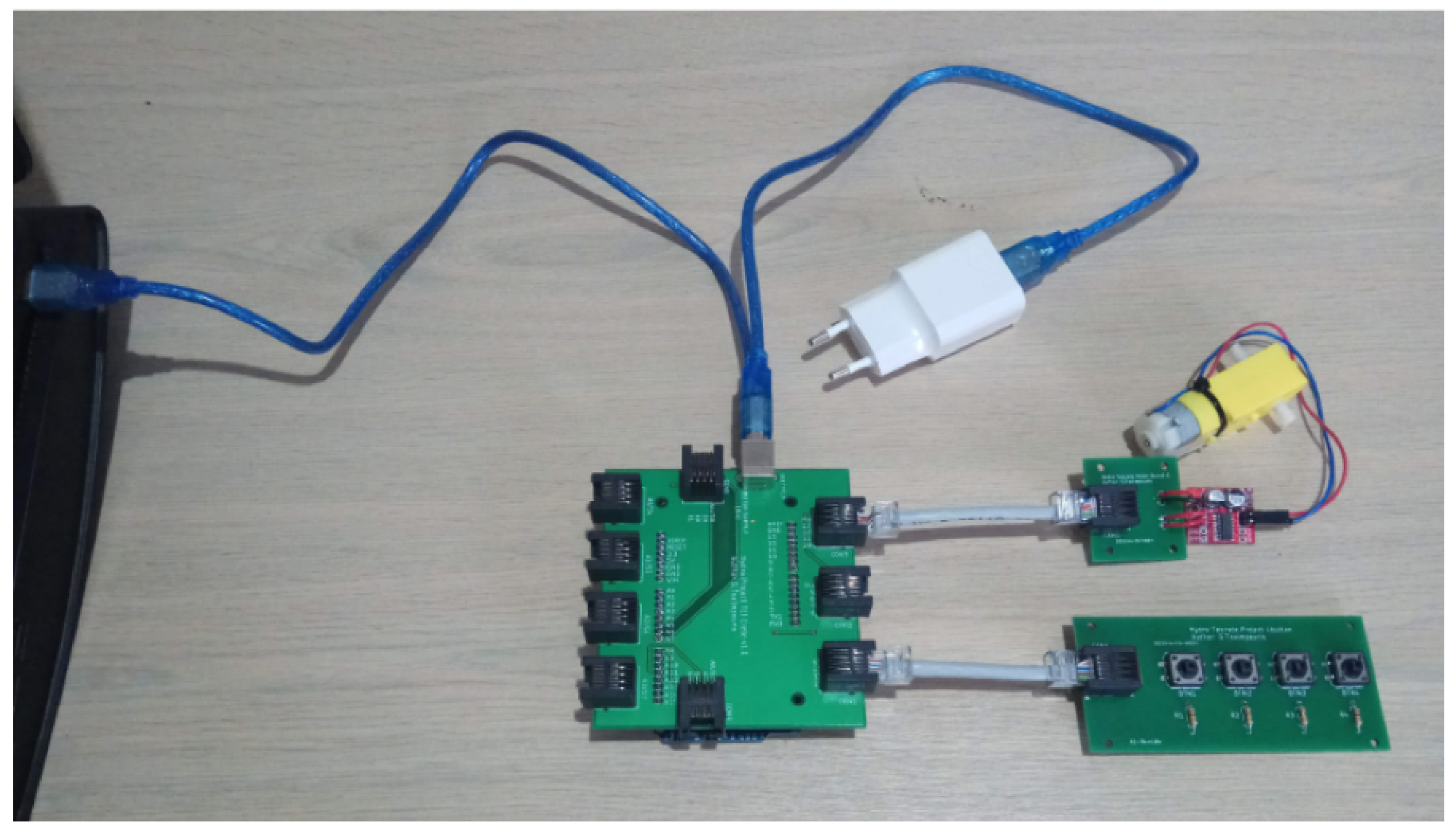
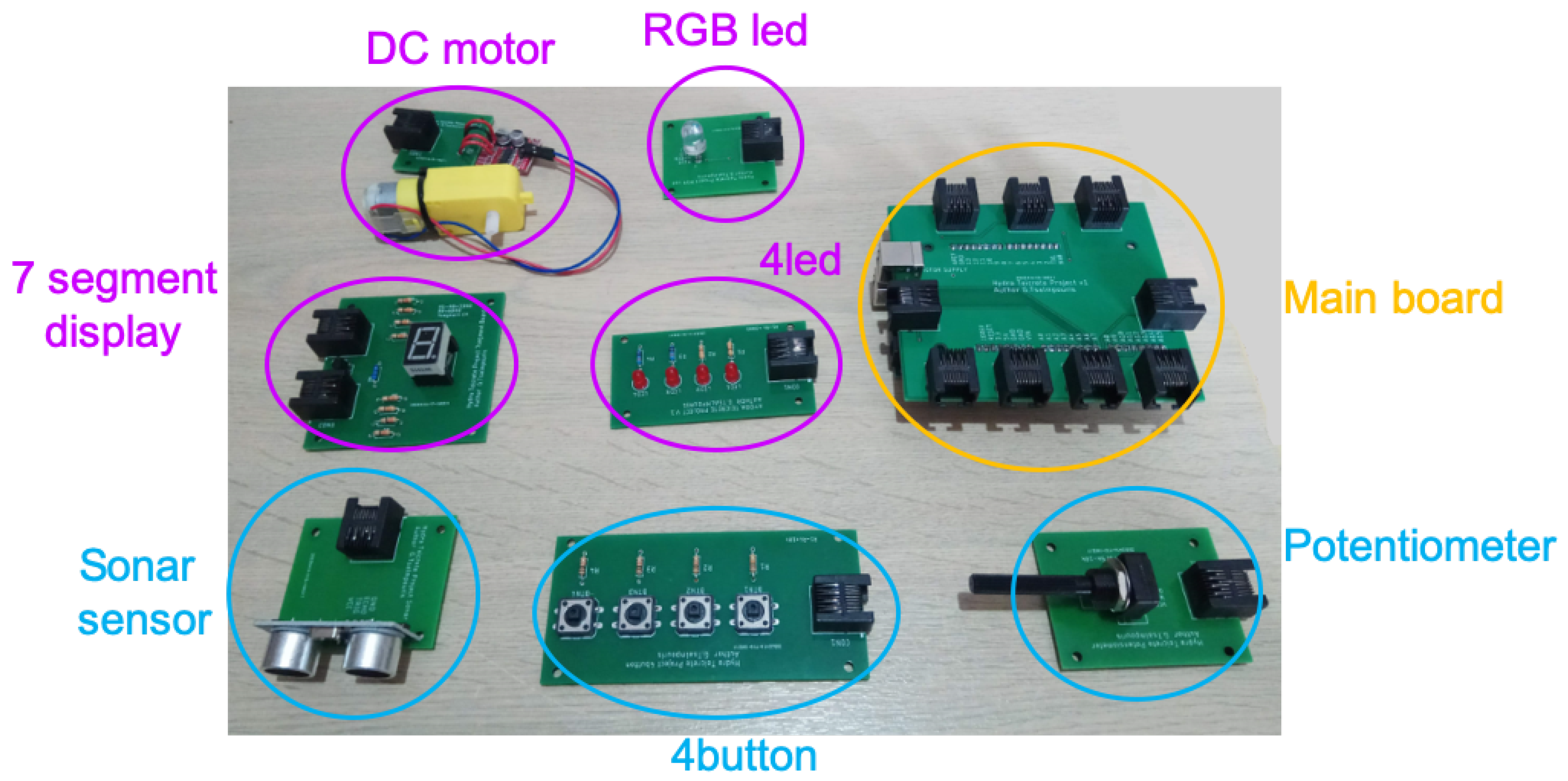
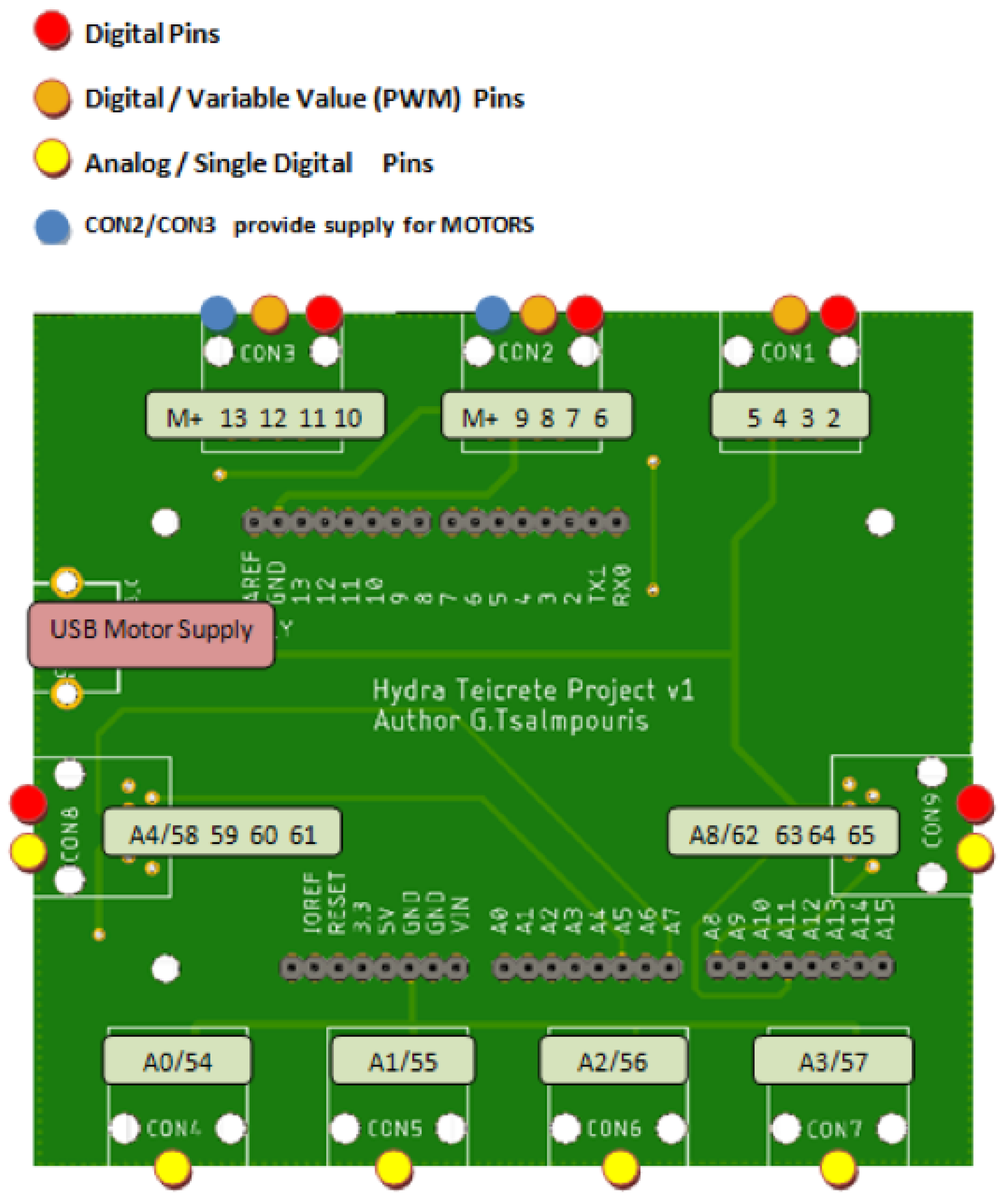
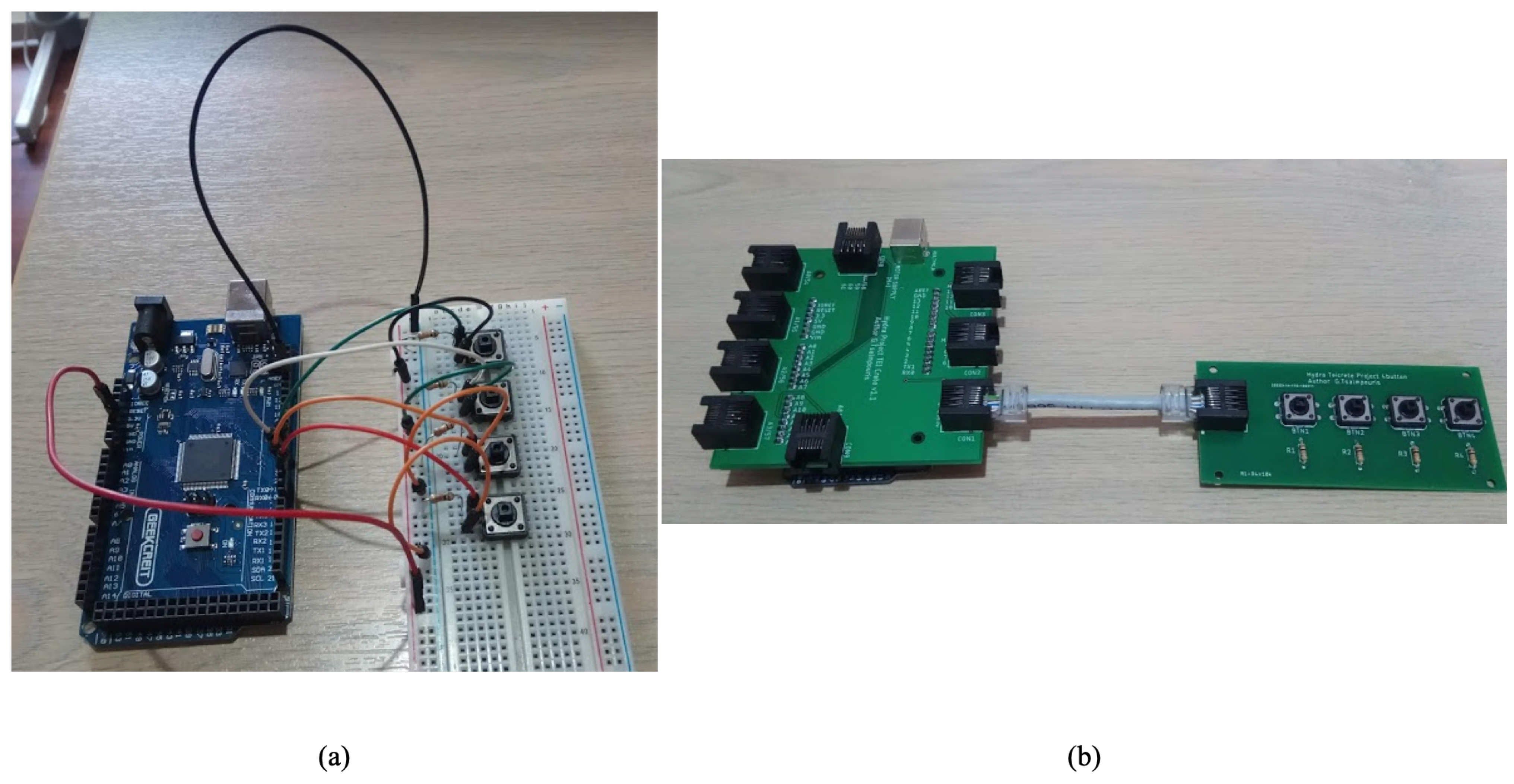
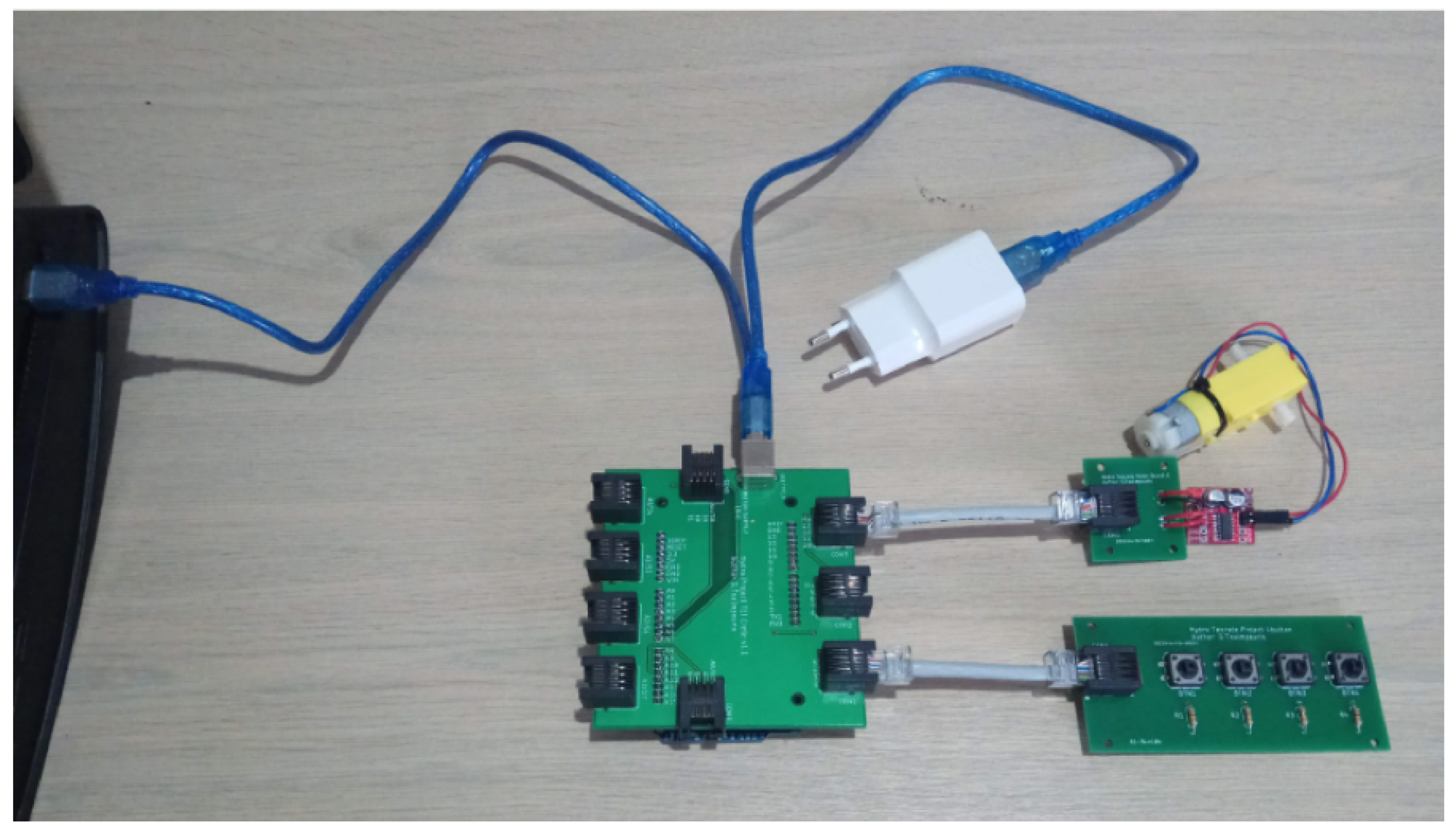
2.2. Hardware
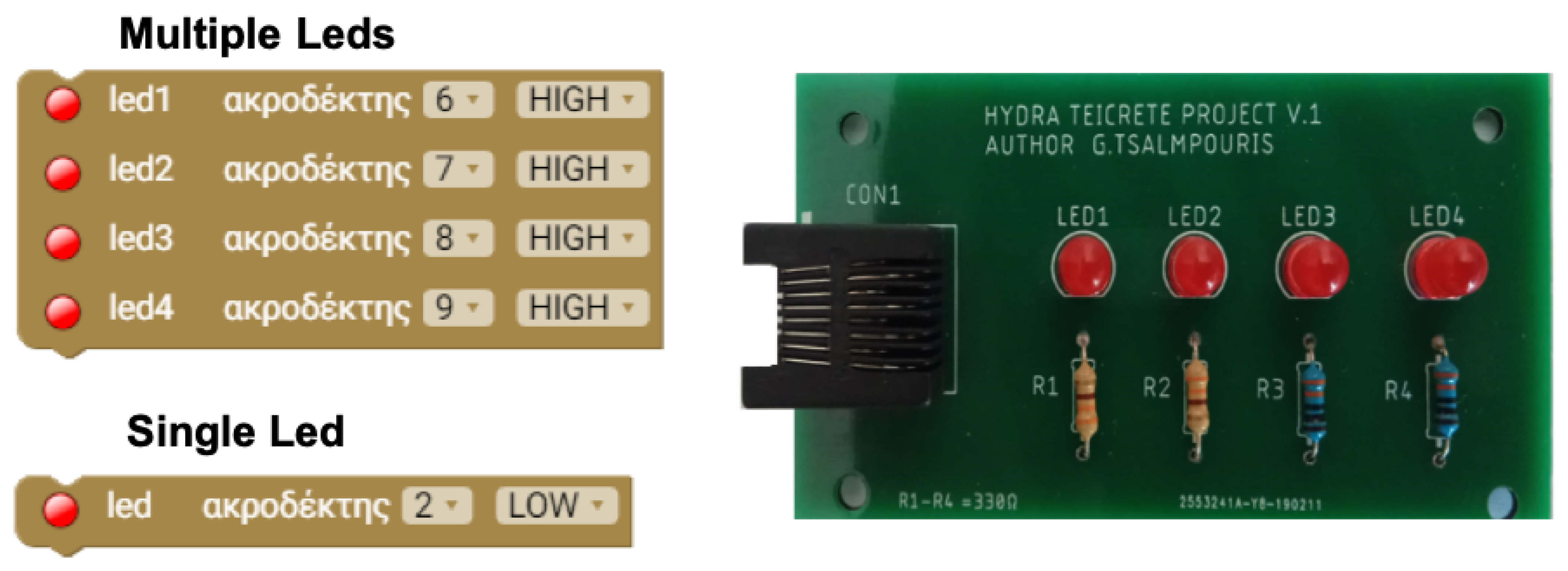
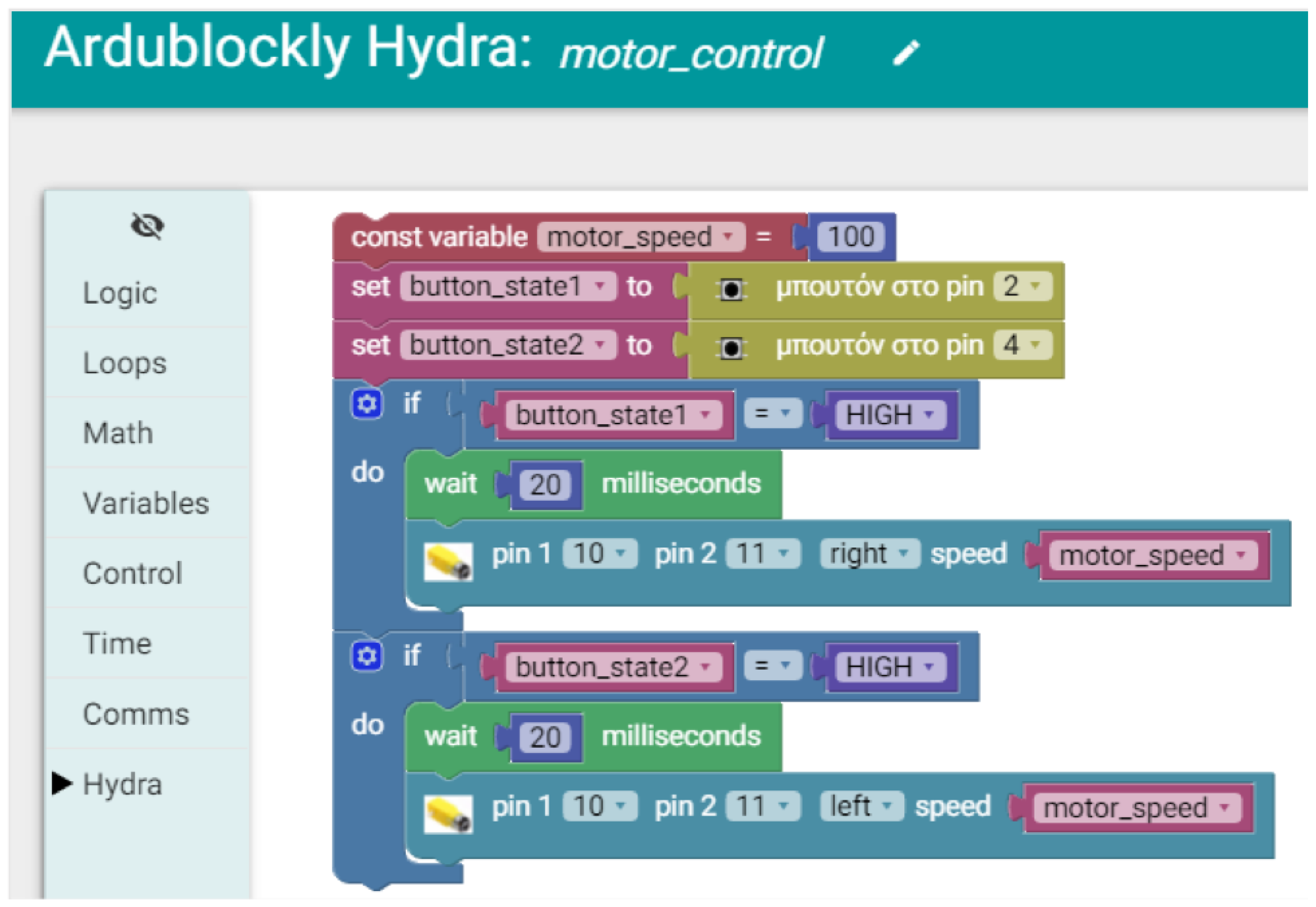
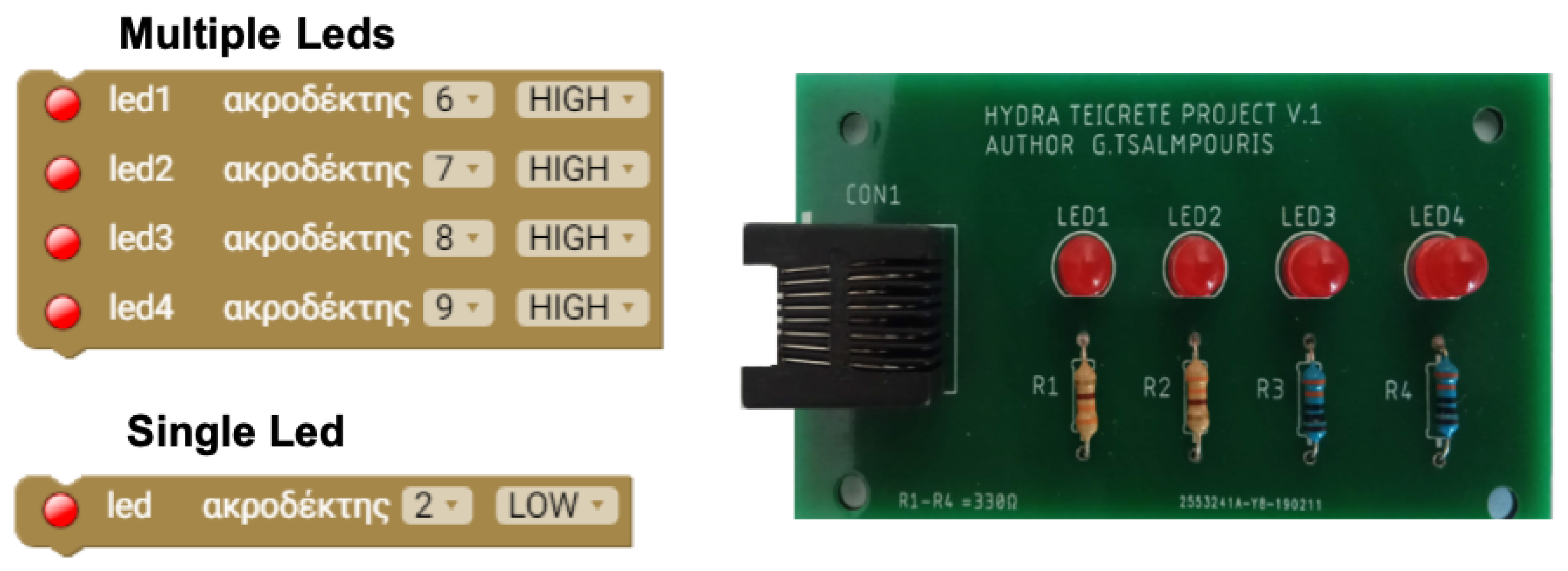
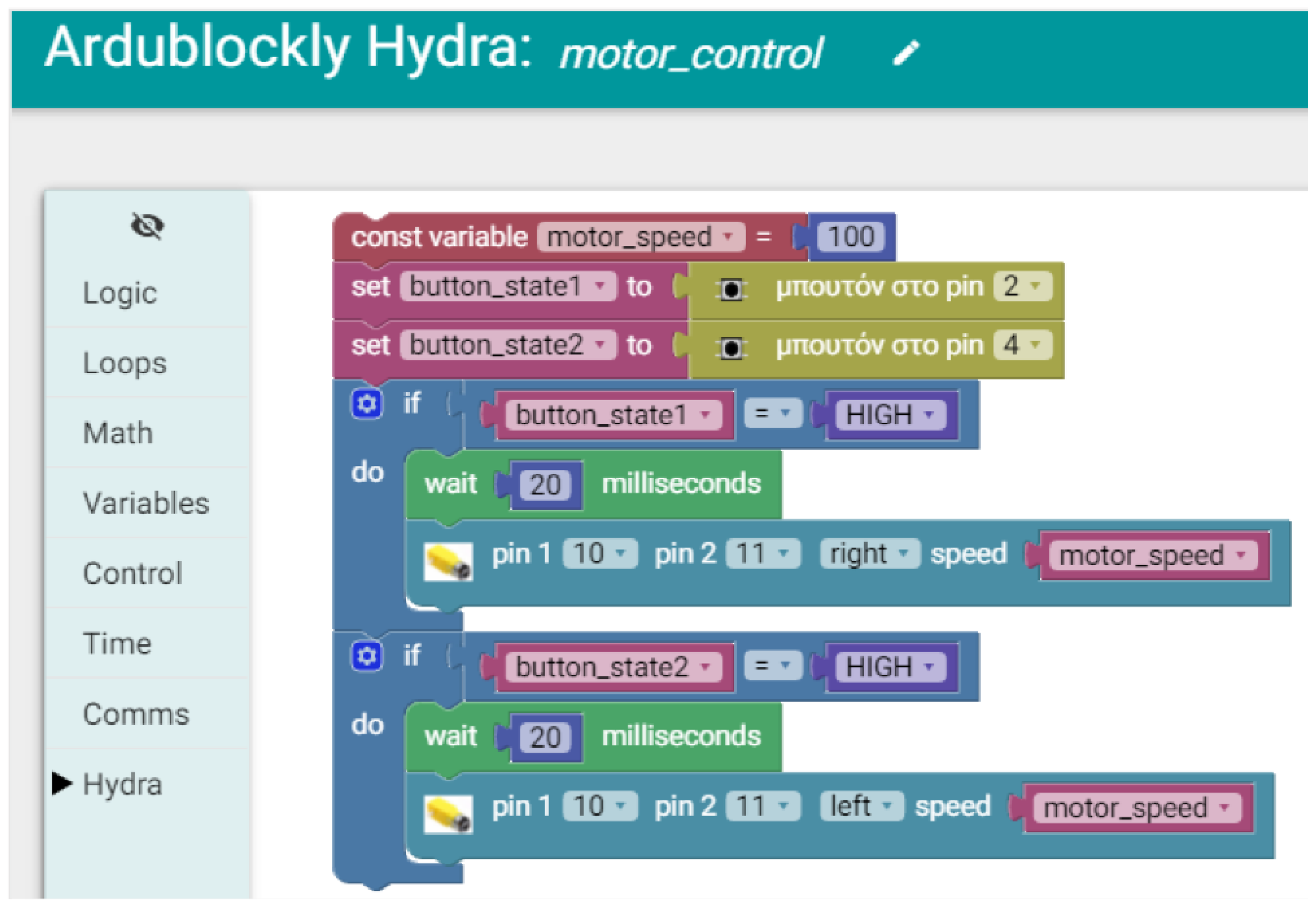
2.3. Software
3. Modeling of the Educational Procedure
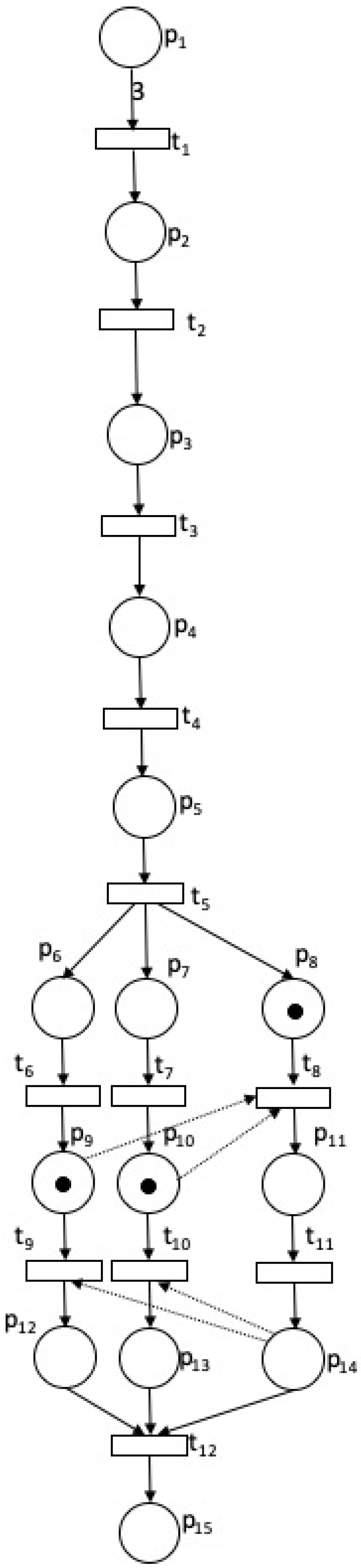
3.1. Petri Net Fundamentals
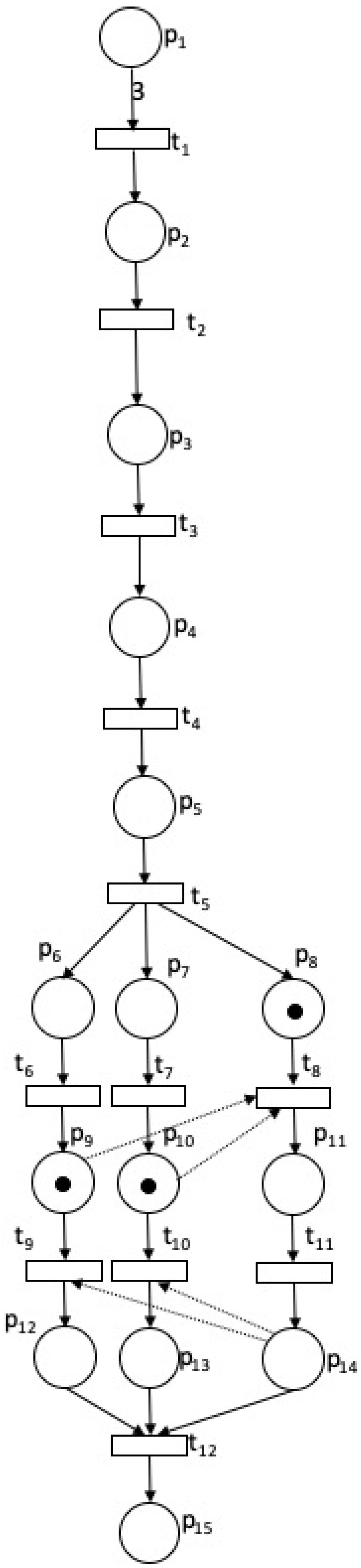
3.2. Application of Petri Nets for Modeling of the Educational Procedure under Study
4. Proof of Concept and Experimental Evaluation
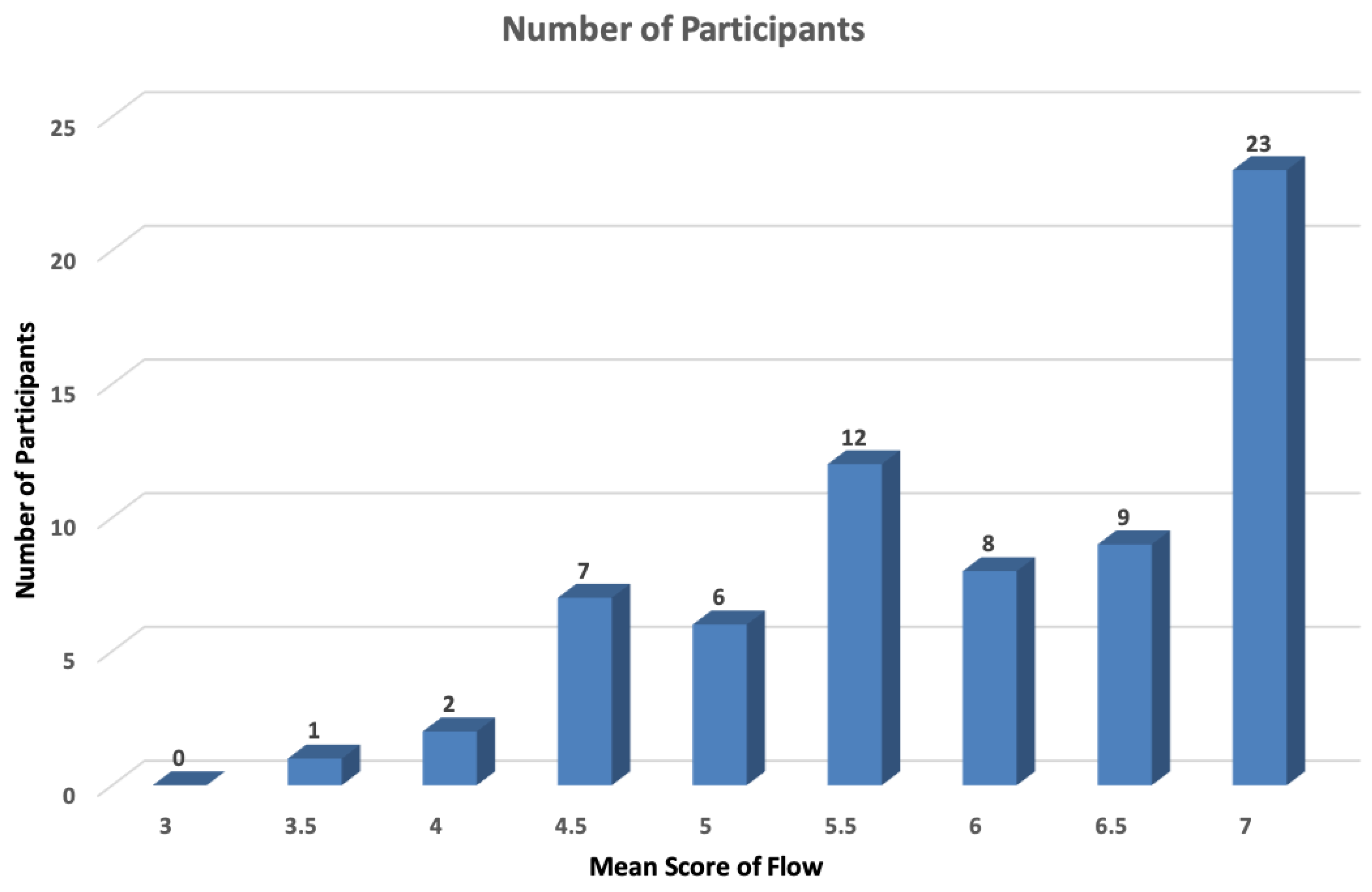
4.1. Flow Theory
4.2. Pilot Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hasani, A.L.; Juansah, D.; El Islami, R. Conceptual Frameworks on How to Teach STEM Concepts in Bahasa Indonesia Subject as Integrated Learning in Grades 1–3 at Elementary School in the Curriculum 2013 to Contribute to Sustainability Education. Sustainability 2021, 13, 173. [Google Scholar] [CrossRef]
- Tawbush, R.L.; Stanley, S.D.; Campbell, T.G.; Webb, M.A. International comparison of K-12 STEM teaching practices. Int. J. STEM Educ. 2020, 13, 115–128. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- De Vries, M.J. Handbook of Technology Education; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Kwon, D.Y.; Kim, H.S.; Shim, J.K.; Lee, W.G. Algorithmic bricks: A tangible robot programming tool for elementary school students. IEEE Trans. Educ. 2012, 55, 474–479. [Google Scholar] [CrossRef]
- Han, Z.H.; Jiang, Y.; Zhan, Y. STEM Education in Early Childhood: A Review of Empirical Studies. Int. J. STEM Educ. 2020, 32, 940–962. [Google Scholar]
- Li, Y.; Wang, K.; Xiao, Y.; Froyd, E.J. Research and trends in STEM education: A systematic review of journal publications. Int. J. STEM Educ. 2020, 7. [Google Scholar] [CrossRef] [Green Version]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Eguchi, A.; Shen, J. Student learning experience through CoSpace educational robotics. In Society for Information Technology & Teacher Education International Conference; Association for the Advancement of Computing in Education (AACE): Waynesville, NC, USA, 2012; pp. 19–24. [Google Scholar]
- Papert, S.; Harel, I. Constructionism; Ablex Publishing Corporation: New York, NY, USA, 1991. [Google Scholar]
- Atmatzidou, S.; Demetriadis, S.; Nika, P. How Does the Degree of Guidance Support Students’ Metacognitive and Problem Solving Skills in Educational Robotics? J. Sci. Educ. Technol. 2018, 27, 70–85. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books, Inc.: New York, NY, USA, 1980. [Google Scholar]
- Miglino, O.; Lund, H.H.; Cardaci, M. Robotics as an educational tool. J. Interact. Learn. Res. 1999, 10, 25–47. [Google Scholar]
- Shim, J.; Kwon, D.; Lee, W. The effects of a robot game environment on computer programming education for elementary school students. IEEE Trans. Educ. 2016, 60, 164–172. [Google Scholar] [CrossRef]
- Chin, K.Y.; Hong, Z.W.; Chen, Y.L. Impact of using an educational robot-based learning system on students’ motivation in elementary education. IEEE Trans. Learn. Technol. 2014, 7, 333–345. [Google Scholar] [CrossRef]
- Tuomi, P.; Multisilta, J.; Saarikoski, P.; Suominen, J. Coding skills as a success factor for a society. Educ. Inf. Technol. 2018, 23, 419–434. [Google Scholar] [CrossRef]
- Yoel, S.R.; Dori, Y.J. FIRST High-School Students and FIRST Graduates: STEM Exposure and Career Choices. IEEE Trans. Educ. 2021, 1–10. [Google Scholar] [CrossRef]
- Caceres, P.C.; Venero, R.P.; Cordova, F.C. Tangible programming mechatronic interface for basic induction in programming. In Proceedings of the 2018 IEEE Global Engineering Education Conference (EDUCON), Santa Cruz de Tenerife, Spain, 17–20 April 2018; pp. 183–190. [Google Scholar]
- Ali, A.; Mensch, S. Issues and challenges for selecting a programming language in a technology update course. In Proceedings of the Information Systems Education Conference, Phoenix, AZ, USA, 2008; Available online: https://www.researchgate.net/publication/228651088_Issues_and_challenges_for_selecting_a_programming_language_in_a_technology_update_course (accessed on 25 September 2021).
- Sapounidis, T.; Demetriadis, S.; Stamelos, I. Evaluating children performance with graphical and tangible robot programming tools. Pers. Ubiquitous Comput. 2015, 19, 225–237. [Google Scholar] [CrossRef]
- Bers, M.U.; Flannery, L.; Kazakoff, E.R.; Sullivan, A. Computational thinking and tinkering: Exploration of an early childhood robotics curriculum. Comput. Educ. 2014, 72, 145–157. [Google Scholar] [CrossRef]
- McGill, M.M. Learning to program with personal robots: Influences on student motivation. ACM Trans. Comput. Educ. (TOCE) 2012, 12, 4. [Google Scholar] [CrossRef]
- Evripidou, S.; Georgiou, K.; Doitsidis, L.; Amanatiadis, A.A.; Zinonos, Z.; Chatzichristofis, S.A. Educational Robotics: Platforms, Competitions and Expected Learning Outcomes. IEEE Access 2020, 8, 219534–219562. [Google Scholar] [CrossRef]
- Kaburlasos, V.G.; Dardani, C.; Dimitrova, M.; Amanatiadis, A. Multi-robot engagement in special education: A preliminary study in autism. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–2. [Google Scholar]
- Amanatiadis, A.; Kaburlasos, V.G.; Dardani, C.; Chatzichristofis, S.A. Interactive social robots in special education. In Proceedings of the 2017 IEEE 7th International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 3–6 September 2017; pp. 126–129. [Google Scholar]
- Amanatiadis, A.; Kaburlasos, V.G.; Dardani, C.; Chatzichristofis, S.A.; Mitropoulos, A.C. Social Robots in Special Education: Creating Dynamic Interactions for Optimal Experience. IEEE Consum. Electron. Mag. 2020, 9, 39–45. [Google Scholar] [CrossRef]
- Garris, R.; Ahlers, R.; Driskell, J.E. Games, motivation, and learning: A research and practice model. Simul. Gaming 2002, 33, 441–467. [Google Scholar] [CrossRef]
- Gallardo, D.; Julia, C.F.; Jorda, S. TurTan: A tangible programming language for creative exploration. In Proceedings of the 2008 3rd IEEE International Workshop on Horizontal Interactive Human Computer Systems, Amsterdam, The Netherlands, 1–3 October 2008; pp. 89–92. [Google Scholar]
- Horn, M.S.; Jacob, R.J. Tangible programming in the classroom with tern. In CHI’07 Extended Abstracts on Human Factors in Computing Systems; ACM: New York, NY, USA, 2007; pp. 1965–1970. [Google Scholar]
- Mondada, F.; Bonani, M.; Riedo, F.; Briod, M.; Pereyre, L.; Rétornaz, P.; Magnenat, S. Bringing robotics to formal education: The thymio open-source hardware robot. IEEE Robot. Autom. Mag. 2017, 24, 77–85. [Google Scholar] [CrossRef] [Green Version]
- De Cristoforis, P.; Pedre, S.; Nitsche, M.; Fischer, T.; Pessacg, F.; Di Pietro, C. A behavior-based approach for educational robotics activities. IEEE Trans. Educ. 2012, 56, 61–66. [Google Scholar] [CrossRef]
- English, L.D. Advancing Elementary and Middle School STEM Education. Int. J. Sci. Math. Educ. 2017, 15, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Fallon, G.; Hatzigianni, M.; Bower, M.; Forbes, A.; Stevenson, M. Understanding K-12 STEM Education: A Framework for Developing STEM Literacy. J. Sci. Educ. Technol. 2020, 29, 369–385. [Google Scholar] [CrossRef]
- Fraser, N. Ten things we have learned from Blockly. In Proceedings of the 2015 IEEE Blocks and Beyond Workshop (Blocks and Beyond), Atlanta, GA, USA, 22 October 2015; pp. 49–50. [Google Scholar] [CrossRef]
- Ardublockly’s Web Page. Available online: https://ardublockly.embeddedlog.com (accessed on 29 January 2019).
- Murata, T. Petri nets: Properties, analysis and applications. Proc. IEEE 2014, 77, 541–580. [Google Scholar] [CrossRef]
- Desrochers, A.; Al-Jaar, R. Applications of Petri Nets in Manufacturing Systems-Modeling, Control and Performance Analysis; IEEE Press: New York, NY, USA, 1995. [Google Scholar]
- Proth, J.; Sauer, N. Scheduling of piecewise constant product flows: A Petri net approach. Eur. J. Oper. Res. 1998, 106, 45–56. [Google Scholar] [CrossRef]
- Kuchárik, M.; Balogh, Z. Student Learning Simulation Process with Petri Nets. In Recent Developments in Intelligent Computing, Communication and Devices; Patnaik, S., Jain, V., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2018; Volume 752, pp. 1115–1124. [Google Scholar]
- Balogh, Z.; Turøoáni, M. Possibilities of Modelling Web-Based Education Using IF-THEN Rules and Fuzzy Petri Nets in LMS. In Informatics Engineering and Information Science: International Conference; Springer: Berlin/Heidelberg, Germany, 2011; pp. 93–106. [Google Scholar]
- Wang, Y.Y.; Lai, A.F.; Shen, R.K.; Yang, V.; Chu, Y.H. Modeling and verification of an intelligent tutoring system based on Petri net theory. Math. Biosci. Eng. 2019, 16, 4947–4975. [Google Scholar] [CrossRef] [PubMed]
- Balogh, Z.; Drozda, M.; Kuchárik, M. Petri net model of student choices in a LMS moddle e-course. In Proceedings of the 12th International Scientific Conference on Distance Learning in Applied Informatics, Sturovo, Slovakia, March 2019; Available online: https://www.researchgate.net/publication/331546741_PETRI_NET_MODEL_OF_STUDENT_CHOICES_IN_A_LMS_MOODLE_E-COURSE (accessed on 25 September 2021).
- Shen, V.R.L.; Yang, C.Y.; Wang, Y.Y.; Lin, Y.H. Application of high-level fuzzy Petri nets to educational grading system. Expert Syst. Appl. 2012, 39, 12935–12946. [Google Scholar] [CrossRef]
- Wang, J. Timed Petri Nets: Theory and Application; Kluwer: New York, NY, USA, 1998. [Google Scholar]
- Zurawski, R.; Zhou, M.C. Petri nets and Industrial Applications: A Tutorial. IEEE Trans. Ind. Electron. 1994, 41, 567–583. [Google Scholar] [CrossRef]
- Tsalmpouris, G. Design and Development of a STEM Platform for the Needs of Secondary Education. Master’s Thesis, Hellenic Meditterenean Univeristy, Heraklion, Greeece, 2019. [Google Scholar]
- Hmelo-Silver, C.E. Problem-Based Learning: What and How Do Students Learn? Educ. Psychol. Rev. 2004, 16, 235–266. [Google Scholar] [CrossRef]
- Vasiliou, C.; Ioannou, A.; Zaphiris, P. Measuring Students’ Flow Experience in a Multimodal Learning Environment: A Case Study. In Lecture Notes in Computer Science; Zaphiris, P., Ioannou, A., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 8523. [Google Scholar]
- Csikszentmihalyi, M. Beyond Boredom and Anxiety: Experiencing Flow in Work and Play; Jossey-Bass: San Francisco, CA, USA, 1975. [Google Scholar]
- Jackson, S.A.; Eklund, R.C. The Flow Scales Manual; Fitness Information Technology: Morgantown, WV, USA, 2004. [Google Scholar]
- Giasiranis, S.; Sofos, L. Flow Experience and Educational Effectiveness of Teaching Informatics using AR. J. Educ. Technol. Soc. 2017, 24, 78–88. [Google Scholar]
- Jackson, S.A.; Csikszentmihalyi, M. Flow in Sports; Human Kinetics: Champaign, IL, USA, 1999. [Google Scholar]
- Engeser, S.; Rheinberg, E. Flow, performance and moderators of challenge-skill balance. Motiv. Emot. 2008, 32, 158–172. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Electronic Part | Quantity | Cost (EUR) |
|---|---|---|
| Arduino Mega 2560 | 1 | 8 |
| PCB RJ45 Connectors | 17 | 4 |
| Male 8pin header 2.54 mm | 5 | 0.5 |
| Red led 5 mm | 4 | 0.1 |
| Tact switch 12 × 12 × 7.3 mm | 4 | 0.2 |
| Linear potentiometer 5–10 kΩ | 1 | 1.5 |
| 7-segment display CK | 1 | 0.5 |
| Sonar sensor HC-SR04 | 1 | 2 |
| Motor shield MX1508 | 1 | 1 |
| Dual axis Geared DC Motor 5 V | 1 | 1.5 |
| RGB led 10 mm CK | 1 | 0.2 |
| Resistors and transistors | 21 | 0.5 |
| USB type b pcb connector 90 degree | 1 | 0.2 |
| USB cable type b | 1 | 2 |
| Place | Meaning |
|---|---|
| Available students | |
| Team of three students has been created | |
| Completed predefined laboratory examples | |
| Team has no more questions | |
| Open-ended project is defined | |
| Programmer | |
| Electronic | |
| Secretary | |
| Finished coding | |
| Connections have been implemented | |
| Code and connections are checked | |
| Coding has been approved by secretary | |
| Connections have been approved by secretary | |
| Secretary has finished their tasks | |
| Finished educational procedure |
| Transition | Meaning |
|---|---|
| Initiation of the educational procedure for the team | |
| Design of laboratory sheets | |
| Answer of questions and explanations | |
| Definition of open ended project | |
| Role assignment | |
| Code writing (or coding) | |
| Implementation of connections | |
| Secretary checks code and connections | |
| Coding has been terminated | |
| Connections have been finalized | |
| Approval of code and connections | |
| Measurement recording and operation validation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsalmpouris, G.; Tsinarakis, G.; Gertsakis, N.; Chatzichristofis, S.A.; Doitsidis, L. HYDRA: Introducing a Low-Cost Framework for STEM Education Using Open Tools. Electronics 2021, 10, 3056. https://doi.org/10.3390/electronics10243056
Tsalmpouris G, Tsinarakis G, Gertsakis N, Chatzichristofis SA, Doitsidis L. HYDRA: Introducing a Low-Cost Framework for STEM Education Using Open Tools. Electronics. 2021; 10(24):3056. https://doi.org/10.3390/electronics10243056
Chicago/Turabian StyleTsalmpouris, Georgios, George Tsinarakis, Nikolaos Gertsakis, Savvas A. Chatzichristofis, and Lefteris Doitsidis. 2021. "HYDRA: Introducing a Low-Cost Framework for STEM Education Using Open Tools" Electronics 10, no. 24: 3056. https://doi.org/10.3390/electronics10243056
APA StyleTsalmpouris, G., Tsinarakis, G., Gertsakis, N., Chatzichristofis, S. A., & Doitsidis, L. (2021). HYDRA: Introducing a Low-Cost Framework for STEM Education Using Open Tools. Electronics, 10(24), 3056. https://doi.org/10.3390/electronics10243056