
Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials



Abstract
:1. Introduction
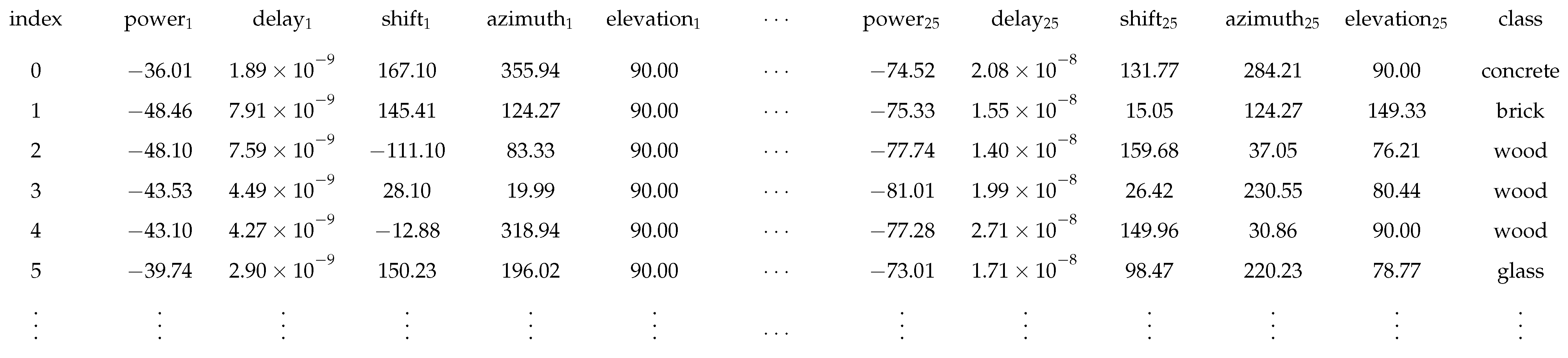
- We specified the RE signature for a rich multipath indoor environment, which is suitable for the classification of wall materials;
- We defined an ML-based framework for the estimation of a wall material which takes advantages of three engineering domains, i.e., measurements, modeling and simulations (environment and communication system modeling and ray-tracing simulations), artificial intelligence (ML techniques) and electromagnetics (EM properties of matter and radio-propagation mechanisms);
- With ML we confirmed the domain-knowledge-based assumptions, stating that the EM properties of the materials and the transmitter/receiver position affect the wall-material classification performance;
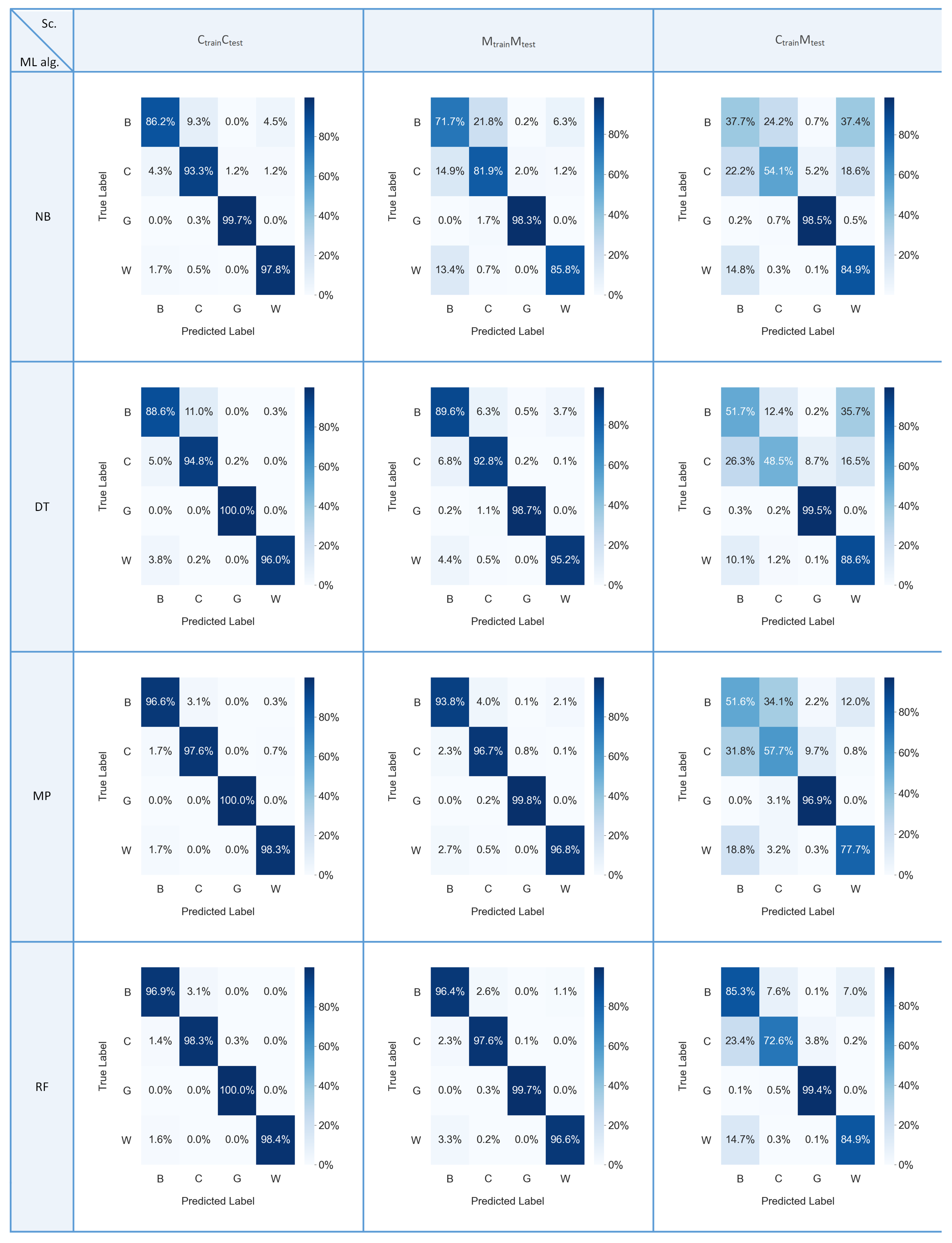
- We analyzed and compared four ML techniques for the wall-material classification applied to the same dataset.
2. Background and Related Work
2.1. Indoor Mapping
2.2. Relative Permittivity Estimation
2.3. Wireless Sensing
2.4. Indoor Environment Classification
3. Radio-Environment Signature
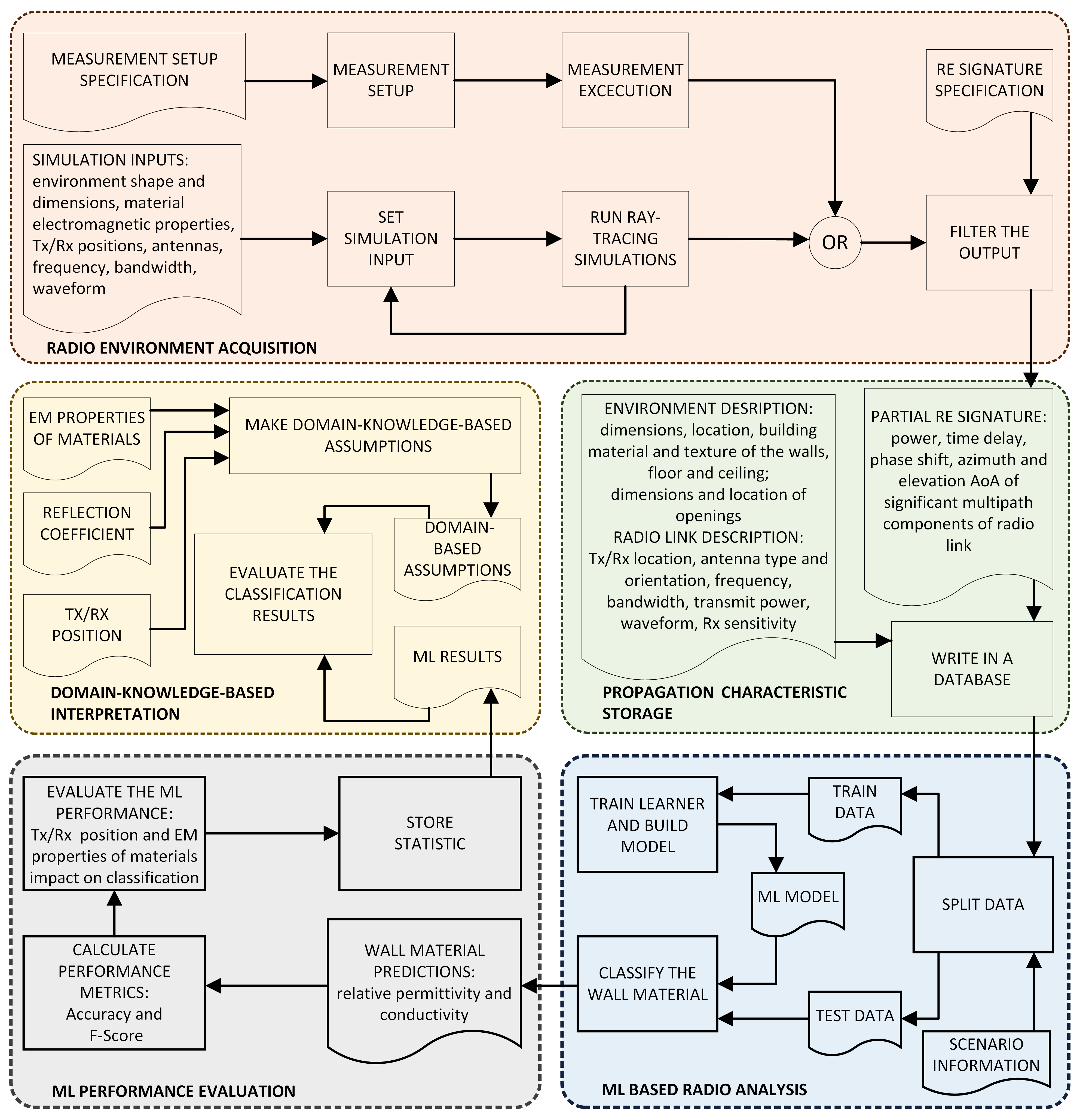
4. ML-Based Wireless-Sensing Framework
- RE acquisition module: collects the propagation parameters of multiple wireless links in different indoor environments by measurements or computer simulations, pre-processes the results and transforms them into the form of partial RE signature;
- Propagation characteristics storage module: stores the partial RE signature, environment and radio system description in a database for the purposes of building a large dataset for the ML task and as open-access data for other RE-related studies.
- ML-based radio-analysis module: builds training and testing datasets from the main dataset according to a predefined scenario, extracts knowledge from the training set, builds a model and applies the model to classify the RE from the input RE signature.
- ML performance-evaluation module: calculates ML performance metrics and stores the statistics.
- Domain-knowledge-based interpretation module: Evaluates the classification results by taking into account the domain knowledge in the field of EM propagation.
4.1. Radio-Environment Acquisition Module
4.2. Propagation Characteristic Storage Module
- Description of the environment;
- Description of the radio system, (i.e., transmitters and receivers);
- RE signatures.
4.3. Machine Learning Based Radio-Analysis Module
4.4. Machine Learning Performance-Evaluation Module
- Classification accuracy is the ratio between the number of correct predictions and the total number of input instances. It is a relevant metric in our classification problem since the number of instances belonging to each class is the same. The classification accuracy for the ith class is calculated with (4):
- F-score (F) is the harmonic mean of precision and recall. It is the measure of classifier precision and robustness. It tells us how many instances are classified correctly and if it does not miss a significant number of instances. The large F values represent good performance of the model. F calculated for the ith class is obtained by using (5)–(7):
4.5. Domain-Knowledge-Based Interpretation Module
5. Framework Use Case Example
5.1. Dataset Building
- Setting up an indoor scene, including the geometry and EM properties of the wall materials;
- Specification of the communication technology and its parameters and the location of the radio nodes;
- Specification or ray-tracing algorithm;
- Execution of simulations to obtain the dataset.
5.2. Dataset Summary
5.3. Simulation Scenarios
- : training and testing on the dataset that corresponds to the central transmitter position;
- : training and testing on the dataset that corresponds to multiple transmitter positions;
- : training on the dataset that corresponds to the central transmitter position and testing on the data that corresponds to the multiple non-central transmitter positions.
5.4. Results and Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 6G | sixth generation |
| ANN | artificial neural network |
| AoA | angle of arrival |
| CTF | channel transform function |
| CIR | channel impulse response |
| CM | confusion matrix |
| CSI | channel state information |
| DT | decision tree |
| EM | electromagnetic |
| F | F-score |
| FCF | frequency coherence function |
| FP | false positives |
| FN | false negatives |
| HP | Horizontal polarization |
| IoT | Internet of Things |
| KNN | k-nearest neighbor KNN |
| LiDAR | light detection and ranging |
| LoS | line of sight |
| ML | machine learning |
| MP | Multilayer Perceptron |
| NB | naive Bayes |
| RE | radio environment |
| RF | random forest |
| RTI | radio tomographic imaging |
| RX | eceiver |
| SLAM | simultaneous localization and mapping |
| SBR | shooting and bouncing ray |
| SVM | support vector machine |
| TN | true negatives |
| TP | true positives |
| TX | transmitter |
| UWB | ultra-wide-band |
| VP | vertical polarization |
| W | wall |
| WSN | wireless sensor network |
References
- Kirimtat, A.; Krejcar, O.; Kertesz, A.; Tasgetiren, M.F. Future Trends and Current State of Smart City Concepts: A Survey. IEEE Access 2020, 8, 86448–86467. [Google Scholar] [CrossRef]
- Li, K.J. Indoor Space: A New Notion of Space. In Web and Wireless Geographical Information Systems; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–3. [Google Scholar]
- Virk, U.T.; Nguyen, S.L.H.; Haneda, K.; Wagen, J. On-Site Permittivity Estimation at 60 GHz Through Reflecting Surface Identification in the Point Cloud. IEEE Trans. Antennas Propag. 2018, 66, 3599–3609. [Google Scholar] [CrossRef] [Green Version]
- ITU-R. Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz; Standard Rec. ITU-R P.2040-2; International Organization for Standardization: Geneva, Switzerland, 2021. [Google Scholar]
- Obeidat, H.; Alabdullah, A.; Elkhazmi, E.; Suhaib, W.; Obeidat, O.; Alkhambashi, M.; Mosleh, M.; Ali, N.; Dama, Y.; Abidin, Z.; et al. Indoor Environment Propagation Review. Comput. Sci. Rev. 2020, 37, 100272. [Google Scholar] [CrossRef]
- Bedford, M.D.; Hrovat, A.; Kennedy, G.; Javornik, T.; Foster, P. Modeling Microwave Propagation in Natural Caves Using LiDAR and Ray Tracing. IEEE Trans. Antennas Propag. 2020, 68, 3878–3888. [Google Scholar] [CrossRef]
- You, X.; Wang, C.X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G Wireless Communication Networks: Vision, Enabling Technologies, and New Paradigm Shifts. Sci. China Inf. Sci. 2020, 64, 110301. [Google Scholar] [CrossRef]
- Wang, C.X.; Huang, J.; Wang, H.; Gao, X.; You, X.; Hao, Y. 6G Wireless Channel Measurements and Models: Trends and Challenges. IEEE Veh. Technol. Mag. 2020, 15, 22–32. [Google Scholar] [CrossRef]
- Huang, J.; Wang, C.X.; Bai, L.; Sun, J.; Yang, Y.; Li, J.; Tirkkonen, O.; Zhou, M.T. A Big Data Enabled Channel Model for 5G Wireless Communication Systems. IEEE Trans. Big Data 2020, 6, 211–222. [Google Scholar] [CrossRef] [Green Version]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.C. Toward Smart Wireless Communications via Intelligent Reflecting Surfaces: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Saunders, S.; Aragón-Zavala, A. Antennas and Propagation for Wireless Communication Systems; Wiley-Blackwell (an Imprint of John Wiley and Sons Ltd.): New York, NY, USA, 2007. [Google Scholar]
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. A Machine Learning Approach for the Classification of Indoor Environments Using RF Signatures. In Proceedings of the 2018 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Anaheim, CA, USA, 26–29 November 2018; pp. 1060–1062. [Google Scholar] [CrossRef]
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. Classification of Indoor Environments for IoT Applications: A Machine Learning Approach. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2164–2168. [Google Scholar] [CrossRef]
- He, D.; Ai, B.; Guan, K.; Wang, L.; Zhong, Z.; Kürner, T. The Design and Applications of High-Performance Ray-Tracing Simulation Platform for 5G and Beyond Wireless Communications: A Tutorial. IEEE Commun. Surv. Tutor. 2019, 21, 10–27. [Google Scholar] [CrossRef]
- Chen, J.; Clarke, K.C. Indoor Cartography. Cartogr. Geogr. Inf. Sci. 2019, 47, 95–109. [Google Scholar] [CrossRef]
- Wu, H.; Yue, H.; Xu, Z.; Yang, H.; Liu, C.; Chen, L. Automatic Structural Mapping and Semantic Optimization from Indoor Point Clouds. Autom. Constr. 2021, 124, 103460. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/ (accessed on 12 May 2021).
- MazeMap. MazeMap. Available online: https://www.mazemap.com/ (accessed on 25 October 2021).
- Kang, Z.; Yang, J.; Yang, Z.; Cheng, S. A Review of Techniques for 3D Reconstruction of Indoor Environments. ISPRS Int. J. Geo-Inf. 2020, 9, 330. [Google Scholar] [CrossRef]
- Khatamian, A.; Arabnia, H.R. Survey on 3D Surface Reconstruction. J. Inf. Process. Syst. 2016, 12, 338–357. [Google Scholar]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A Survey on LiDAR Scanning Mechanisms. Electronics 2020, 9, 741. [Google Scholar] [CrossRef]
- De Silva, V.; Roche, J.; Kondoz, A. Robust Fusion of LiDAR and Wide-Angle Camera Data for Autonomous Mobile Robots. Sensors 2018, 18, 2730. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Henry, P.; Krainin, M.; Herbst, X.R.E.; Fox, D. RGB-D Mapping: Using Depth Cameras for Dense 3D Modeling of Indoor Environments. In Experimental Robotics. Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 79, pp. 477–491. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Q.; Yang, B.; Xiao, W.; Chen, C.; Dong, Z. Automatic 3-D Reconstruction of Indoor Environment With Mobile Laser Scanning Point Clouds. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 3117–3130. [Google Scholar] [CrossRef] [Green Version]
- Trimble Geospatial, Laser Scanning. Available online: https://geospatial.trimble.com/products-and-solutions/laser-scanning (accessed on 12 May 2021).
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2001. [Google Scholar]
- Guerra, A.; Guidi, F.; Clemente, A.; D’Errico, R.; Dussopt, L.; Dardari, D. Application of Transmitarray Antennas for Indoor Mapping at Millimeter-Waves. In Proceedings of the 2015 European Conference on Networks and Communications (EuCNC), Paris, France, 29 June–2 July 2015; pp. 77–81. [Google Scholar] [CrossRef] [Green Version]
- Guidi, F.; Guerra, A.; Dardari, D. Personal Mobile Radars with Millimeter-Wave Massive Arrays for Indoor Mapping. IEEE Trans. Mob. Comput. 2016, 15, 1471–1484. [Google Scholar] [CrossRef]
- Naseri, H.; Salmi, J.; Koivunen, V. Indoor Mapping Using MIMO Radio Channel Measurements. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 3321–3325. [Google Scholar] [CrossRef]
- Guidi, F.; Mariani, A.; Guerra, A.; Dardari, D.; Clemente, A.; D’Errico, R. Indoor Environment-Adaptive Mapping With Beamsteering Massive Arrays. IEEE Trans. Veh. Technol. 2018, 67, 10139–10143. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Hu, J.; Chu, N.; Jin, T.; Zhang, J.; Zhou, Z. Building Layout Reconstruction in Concealed Human Target Sensing via UWB MIMO Through-Wall Imaging Radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1199–1203. [Google Scholar] [CrossRef]
- Khan, U.M.; Venkatnarayan, R.H.; Shahzad, M. RFMap: Generating Indoor Maps Using RF Signals. In Proceedings of the 2020 19th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Sydney, NSW, Australia, 21–24 April 2020; pp. 133–144. [Google Scholar] [CrossRef]
- Barneto, C.B.; Rastorgueva-Foi, E.; Keskin, M.F.; Riihonen, T.; Turunen, M.; Talvitie, J.; Wymeersch, H.; Valkama, M. Radio-based Sensing and Environment Mapping in Millimeter-Wave 5G and Beyond Networks. arXiv 2021, arXiv:2102.11593. [Google Scholar]
- Singh, S.P.; Tiwari, N.K.; Akhtar, M.J. A free Space Technique for Dielectrics and Building Materials Characterization for Future 5G Applications. In Proceedings of the 2017 IEEE Applied Electromagnetics Conference (AEMC), Aurangabad, India, 19–22 December 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Gonçalves, F.J.F.; Pinto, A.G.; Mesquita, R.C.; Silva, E.J.; Brancaccio, A. Free-space Materials Characterization by Reflection and Transmission Measurements Using Frequency-by-Frequency and Multi-Frequency Algorithms. Electronics 2018, 7, 260. [Google Scholar] [CrossRef] [Green Version]
- Alawnch, I.; Barowski, J.; Rolfes, I. Extraction of Relative Permittivity from Measured Reflection Coefficient of Dielectric Materials in the Frequency Range 207–247 GHz. In Proceedings of the 2018 48th European Microwave Conference (EuMC), Madrid, Spain, 23–27 September 2018; pp. 576–579. [Google Scholar] [CrossRef]
- Possenti, L.; Barbiroli, M.; Degli-Esposti, V.; Fuschini, F.; Vitucci, E.M. EM Characterization of Common Construction Materials Using the Fabry-Pérot resonance method. In Proceedings of the IEEE 2019 International Symposium on Antennas and Propagation (ISAP), Xi’an, China, 27–30 October 2019; pp. 1–3. [Google Scholar]
- Zhekov, S.S.; Franek, O.; Pedersen, G.F. Dielectric Properties of Common Building Materials for Ultrawideband Propagation Studies. IEEE Antennas Propag. Mag. 2020, 62, 72–81. [Google Scholar] [CrossRef]
- Gorst, A.; Zavyalova, K.; Shipilov, S.; Yakubov, V.; Mironchev, A. Microwave Method for Measuring Electrical Properties of the Materials. Appl. Sci. 2020, 10, 8936. [Google Scholar] [CrossRef]
- Chakyar, S.P.; K. Simon, S.; Bindu, C.; Andrews, J.; Joseph, V. Complex Permittivity Measurement using Metamaterial Split Ring Resonators. J. Appl. Phys. 2017, 121, 054101. [Google Scholar] [CrossRef]
- Kim, C.K.; Minz, L.; Park, S.O. Improved Measurement Method of Material Properties using Continuous Cavity Perturbation Without Relocation. IEEE Trans. Instrum. Meas. 2020, 69, 5702–5716. [Google Scholar] [CrossRef]
- Landron, O.; Feuerstein, M.J.; Rappaport, T.S. In situ Microwave Reflection Coefficient Measurements for Smooth and Rough Exterior Wall Surfaces. In Proceedings of the IEEE 43rd Vehicular Technology Conference, Secaucus, NJ, USA, 18–20 May 1993; pp. 77–80. [Google Scholar] [CrossRef]
- Sato, K.; Manabe, T.; Ihara, T.; Saito, H.; Ito, S.; Tanaka, T.; Sugai, K.; Ohmi, N.; Murakami, Y.; Shibayama, M.; et al. Measurements of Reflection and Transmission Characteristics of Interior Structures of Office Building in the 60 GHz band. IEEE Trans. Antennas Propag. 1997, 45, 1783–1792. [Google Scholar] [CrossRef]
- Langen, B.; Lober, G.; Herzig, W. Reflection and Transmission Behaviour of Building Materials at 60 GHz. In Proceedings of the 5th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Wireless Networks—Catching the Mobile Future, The Hague, The Netherlands, 18–23 September 1994; Volume 2, pp. 505–509. [Google Scholar] [CrossRef]
- Ahmadi-Shokouh, J.; Noghanian, S.; Keshavarz, H. Reflection Coefficient Measurement for North American House Flooring at 57–64 GHz. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 1321–1324. [Google Scholar] [CrossRef]
- Hu, Y.; Hu, F.; Yang, Z.; Cheng, Y.; Wang, C. Complex Permittivity Estimation From Millimeter-Wave Radiometry. IEEE Geosci. Remote Sens. Lett. 2020, 1–5. [Google Scholar] [CrossRef]
- Vilovic, I.; Nad, R.; Sipus, Z.; Burum, N. A non-Destructive Approach for Extracting the Complex Dielectric Constant of the Walls in Building. In Proceedings of the 2008 50th International Symposium ELMAR, Borik Zadar, Croatia, 10–12 September 2008; Volume 2, pp. 609–612. [Google Scholar]
- Vilovic, I.; Burum, N.; Nadj, R. Estimation of Dielectric Constant of Composite Materials in Buildings Using Reflected Fields and PSO Algorithm. In Proceedings of the Fourth European Conference on Antennas and Propagation, Barcelona, Spain, 12–16 April 2010; pp. 1–5. [Google Scholar]
- Lu, J.; Steinbach, D.; Cabrol, P.; Pietraski, P.; Pragada, R.V. Propagation Characterization of an Office Building in the 60 GHz Band. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 809–813. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. Radio Tomographic Imaging with Wireless Networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Xu, Q.; Chen, C.; Zhang, F.; Liu, K.J.R. The Promise of Radio Analytics: A Future Paradigm of Wireless Positioning, Tracking, and Sensing. IEEE Signal Process. Mag. 2018, 35, 59–80. [Google Scholar] [CrossRef]
- Liu, J.; Guanlong, T.; Hong, F. Human Activity Sensing with Wireless Signals: A Survey. Sensors 2020, 20, 1210. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, Z.; Wu, C.; Yang, Z.; Liu, Y. Sensorless Sensing with WiFi. Tsinghua Sci. Technol. 2015, 20, 1–6. [Google Scholar] [CrossRef]
- Ma, Y.; Gang, Z.; Wang, S. WiFi Sensing with Channel State Information: A Survey. ACM Comput. Surv. 2019, 52, 1–36. [Google Scholar] [CrossRef] [Green Version]
- Khalili, A.; Soliman, A.H.; Asaduzzaman, M.; Griffiths, A. Wi-Fi Sensing: Applications and Challenges. J. Eng. 2020, 2020, 87–97. [Google Scholar] [CrossRef]
- Liu, J.; Liu, H.; Chen, Y.; Wang, Y.; Wang, C. Wireless Sensing for Human Activity: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 1629–1645. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor Localization via Channel Response. ACM Comput. Surv. 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Rashid, B.; Rehmani, M.H. Applications of Wireless Sensor Networks for Urban Areas: A Survey. J. Netw. Comput. Appl. 2016, 60, 192–219. [Google Scholar] [CrossRef]
- Thrun, S. Robotic Mapping: A survey. In Exploring Artificial Intelligence in the New Millennium; Morgan Kaufmann: San Francisco, CA, USA, 2002; pp. 1–34. [Google Scholar]
- Yassin, A.; Nasser, Y.; Al-Dubai, A.Y.; Awad, M. MOSAIC: Simultaneous Localization and Environment Mapping Using mmWave Without A-Priori Knowledge. IEEE Access 2018, 6, 68932–68947. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Q.; Ma, X.; Zhao, Y.; Fang, Y. Learning to Sense: Deep Learning for Wireless Sensing with Less Training Efforts. IEEE Wirel. Commun. 2020, 27, 156–162. [Google Scholar] [CrossRef]
- Di Domenico, S.; De Sanctis, M.; Cianca, E.; Giuliano, F.; Bianchi, G. Exploring Training Options for RF Sensing Using CSI. IEEE Commun. Mag. 2018, 56, 116–123. [Google Scholar] [CrossRef]
- AlHajri, M.I.; Alsindi, N.; Ali, N.T.; Shubair, R.M. Classification of Indoor Environments Based on Spatial Correlation of RF Channel Fingerprints. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 26 June–1 July 2016; pp. 1447–1448. [Google Scholar] [CrossRef]
- Hashemi, H. The Indoor Radio Propagation Channel. Proc. IEEE 1993, 81, 943–968. [Google Scholar] [CrossRef]
- Gifford, W.M.; Li, W.W.; Zhang, Y.J.; Win, M.Z. Effect of Bandwidth on the Number of Multipath Components in Realistic Wireless Indoor Channels. In Proceedings of the 2011 IEEE International Conference on Communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- IEEE. Standard for Local and Metropolitan Area Networks—Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs); Standard IEEE 802.15.4-2011; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Bregar, K.; Mohorčič, M. Improving Indoor Localization Using Convolutional Neural Networks on Computationally Restricted Devices. IEEE Access 2018, 6, 17429–17441. [Google Scholar] [CrossRef]
- Bregar, K.; Hrovat, A.; Mohorčič, M.; Javornik, T. Self-Calibrated UWB Based Device-free Indoor Localization and Activity Detection Approach. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; pp. 176–181. [Google Scholar] [CrossRef]
- Decawave. DW1000 Datasheet. Available online: https://www.decawave.com/ (accessed on 12 May 2021).
- Seidel, S.Y.; Rappaport, T.S. A Ray Tracing Technique to Predict Path Loss and Delay Spread Inside Buildings. In Proceedings of the GLOBECOM ’92—Communications for Global Users: IEEE, Orlando, FL, USA, 6–9 December 1992; Volume 2, pp. 649–653. [Google Scholar] [CrossRef]
- McKown, J.W.; Hamilton, R.L. Ray Tracing as a Design Tool for Radio Networks. IEEE Netw. 1991, 5, 27–30. [Google Scholar] [CrossRef]
- Hrovat, A.; Kandus, G.; Javornik, T. A Survey of Radio Propagation Modeling for Tunnels. IEEE Commun. Surv. Tutor. 2014, 16, 658–669. [Google Scholar] [CrossRef]
- Novak, R. Signal3D. Available online: http://e6.ijs.si/~novak/signal3d/ (accessed on 15 November 2020).
- Chaitra, P.; Kumar, D.R.S. A Review of Multi-Class Classification Algorithms. Int. J. Pure Appl. Math 2018, 118, 17–26. [Google Scholar]
- Aly, M. Survey on Multiclass Classification Methods. Neural Netw. 2005, 19, 1–9. [Google Scholar]
- Domingos, P.; Pazzani, M. On the Optimality of the Simple Bayesian Classifier under Zero-One Loss. Mach. Learn. 1997, 29, 103–130. [Google Scholar] [CrossRef]
- Safavian, S.R.; Landgrebe, D. A Survey of Decision Tree Classifier Methodology. IEEE Trans. Syst. Man Cybern. Syst. 1991, 21, 660–674. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.; Mitra, S. Multilayer Perceptron, Fuzzy Sets, and Classification. IEEE Trans. Neural Netw. Learn. Syst. 1992, 3, 683–697. [Google Scholar] [CrossRef] [PubMed]
- Witten, I.H.; Frank, E.; Hall, M.A. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann Series in Data Management Systems; Morgan Kaufmann: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Deng, X.; Liu, Q.; Deng, Y.; Mahadevan, S. An Improved Method to Construct Basic Probability Assignment Based on the Confusion Matrix for Classification Problem. Inf. Sci. 2016, 340, 250–261. [Google Scholar] [CrossRef]
- Balanis, C.A. Reflection and Transmission. In Advanced Engineering Electromagnetics, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 173–257. [Google Scholar]
- Remcom. Wireless In Site Propagation Software. Available online: https://www.remcom.com/wireless-insite-em-propagation-software (accessed on 15 May 2020).
- Tao, Y.; Lin, H.; Bao, H. GPU-Based Shooting and Bouncing Ray Method for Fast RCS Prediction. IEEE Trans. Antennas Propag. 2010, 58, 494–502. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ML Algorithm | Parameter | Description | Value |
|---|---|---|---|
| DT | Confidence factor | Confidence factor used for pruning | 0.25 |
| Number of objects | Minimum number of instances per leaf | 2 | |
| Number of folds | Size of the pruning set | 3 | |
| RF | Number of trees | Number of trees in the forest | 25 |
| Number of instances | Minimum number of instances per leaf | 1 | |
| Number of levels | Maximum number of levels in each decision tree | unlimited | |
| MP | Learning rate | Learning rate for the backpropagation algorithm (value between 0 and 1) | 0.3 |
| Momentum | Momentum rate for the backpropagating algorithm (value between 0 and 1) | 0.2 | |
| Traininng time | Number of epochs to train trough | 500 |
| Material | (S/m) | |
|---|---|---|
| Brick | 3.75 | 0.038 |
| Concrete | 5.31 | 0.120 |
| Glass | 6.27 | 0.029 |
| Wood | 1.99 | 0.026 |
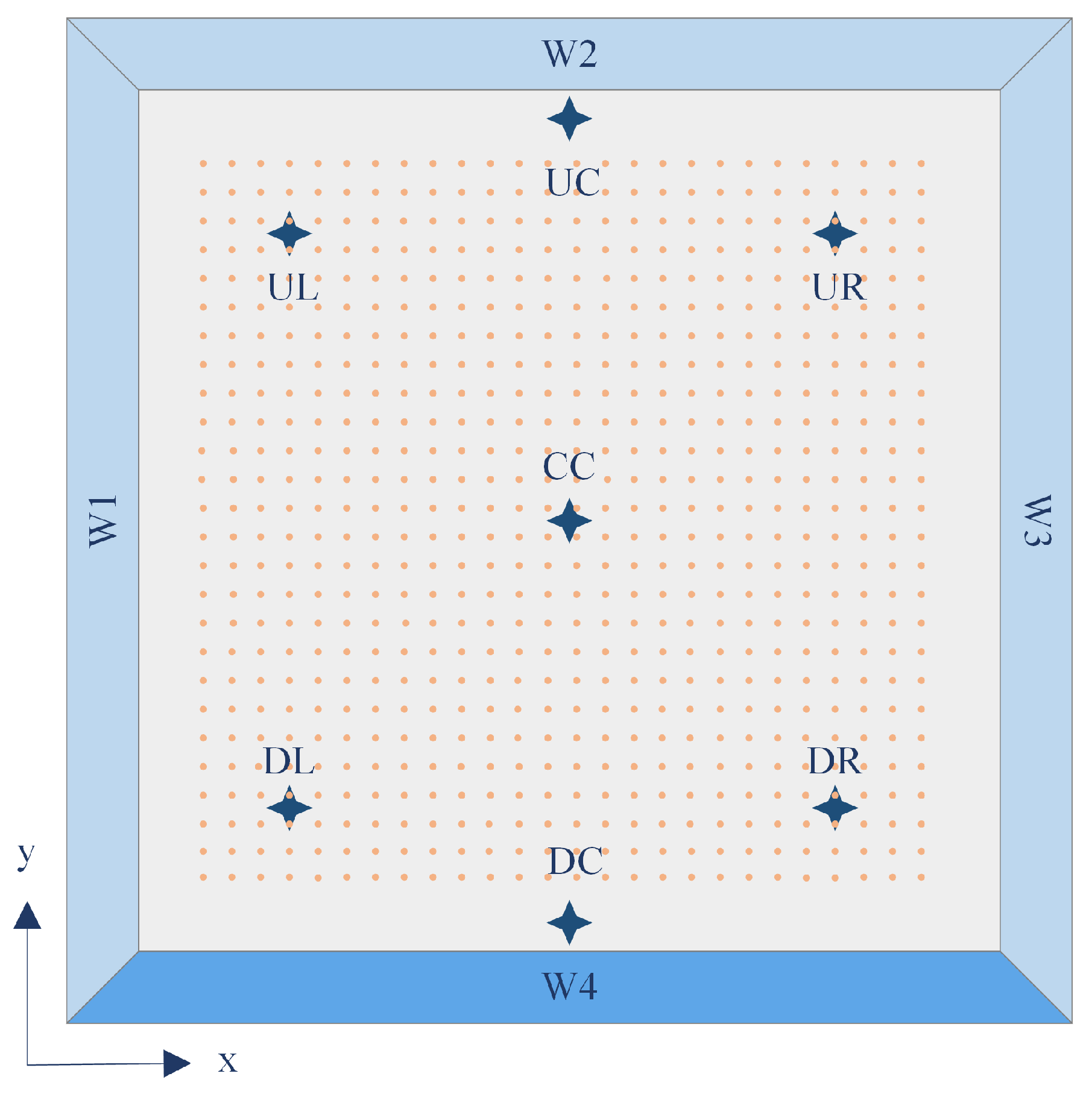
| Transmitter Position | Position Coordinates (x,y) |
|---|---|
| CC | (1.5 m, 1.5 m) |
| DC | (1.5 m, 0.1 m) |
| DL | (0.5 m, 0.5 m) |
| DR | (2.5 m, 0.5 m) |
| UC | (1.5 m, 2.9 m) |
| UL | (0.5 m, 2.5 m) |
| UR | (2.5 m, 2.5 m) |
| Scenario | ML Algorithm | |||
|---|---|---|---|---|
| NB | DT | MP | RF | |
| 94.2% | 94.9% | 98.1% | 98.4% | |
| 84.4% | 94.1% | 96.8% | 97.6% | |
| 68.8% | 72.1% | 71.0% | 85.5% | |
| Material | Scenario | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ML Algorithm | ||||||||||||
| NB | DT | MP | RF | NB | DT | MP | RF | NB | DT | MP | RF | |
| Brick | 0.90 | 0.89 | 0.97 | 0.97 | 0.72 | 0.89 | 0.94 | 0.96 | 0.43 | 0.55 | 0.51 | 0.76 |
| Concrete | 0.92 | 0.92 | 0.97 | 0.98 | 0.80 | 0.93 | 0.96 | 0.97 | 0.60 | 0.60 | 0.58 | 0.80 |
| Glass | 0.99 | 0.99 | 1.00 | 0.99 | 0.98 | 0.99 | 0.99 | 0.99 | 0.96 | 0.95 | 0.93 | 0.98 |
| Wood | 0.96 | 0.98 | 0.99 | 0.99 | 0.89 | 0.96 | 0.97 | 0.98 | 0.70 | 0.74 | 0.82 | 0.88 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kocevska, T.; Javornik, T.; Švigelj, A.; Hrovat, A. Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials. Electronics 2021, 10, 2843. https://doi.org/10.3390/electronics10222843
Kocevska T, Javornik T, Švigelj A, Hrovat A. Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials. Electronics. 2021; 10(22):2843. https://doi.org/10.3390/electronics10222843
Chicago/Turabian StyleKocevska, Teodora, Tomaž Javornik, Aleš Švigelj, and Andrej Hrovat. 2021. "Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials" Electronics 10, no. 22: 2843. https://doi.org/10.3390/electronics10222843
APA StyleKocevska, T., Javornik, T., Švigelj, A., & Hrovat, A. (2021). Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials. Electronics, 10(22), 2843. https://doi.org/10.3390/electronics10222843