To derive conclusions regarding the quality of the proposed approach a long series of test have been conducted on both binary and monochrome images. The results were obtained using the following configuration: processor Intel Core i7-10870H up to 5.0 GHz, 16 GB RAM DDR4, SSD 512 GB, NVIDIA GeForce GTX 1650Ti 4 GB GDDR6.
5.1. Binary Image Registration
Our tests have been conducted on a set of 16 binary images representing signatures, all having the same size pixels. The images, denoted by , are perturbed by the rigid transformation (10) and (11) with various perturbation parameters. The rotation angle is between and 0, while the scale factor was set in . The translation parameters are and . The rigid transformation parameters correspond to the working assumption that the perturbation process is totally reversible, that is the object pixels are completely encoded in the sensed images.
The search space is computed using (19). Note that the intervals and are significantly larger than and . For instance, in case of , and , while and .
Since the perturbation process is totally reversible, the fitness threshold is set close to the maximum value, one. In our test . The rest of the input parameters are set as follows: , , , , , , cf = 2, , , , , , , and .
The experimentally established results regarding the accuracy and the efficiency of Algorithm 1 are provided in
Table 1. Note that the success rate is 100% for all pairs of images,
and the SNR values are computed for images having the gray levels in
. The computation is over when the maximum fitness value is at least 0.9.
5.2. Monochrome Image Registration
In case of more complex, monochrome images, the assumption that the perturbation process is completely reversible is rather unrealistic. From the technical point of view, it means that the search procedure cannot manage to compute an individual with fitness 1, that is even when the rigid transformation parameters are correctly determined. Obviously, in such cases the threshold should be set on lower values and the evaluation of accuracy should take into account the similarity between the aligned version of S and the initial image with the missing parts instead of the target T.
Our tests were conducted on images belonging to the well-known Yale Face Database [
34,
35], which contains 165 greyscale images of 15 individuals, 11 images per subject/class. The results reported in
Table 2,
Table 3 and
Table 4 refer to 30 images, two for each person, while the images displayed in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10 correspond to two classes.
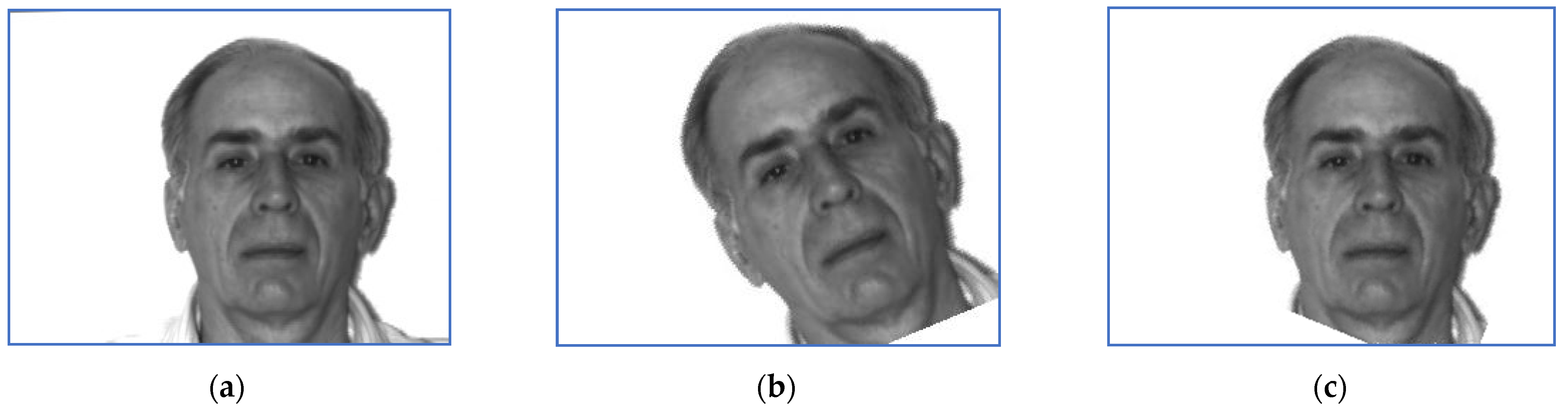
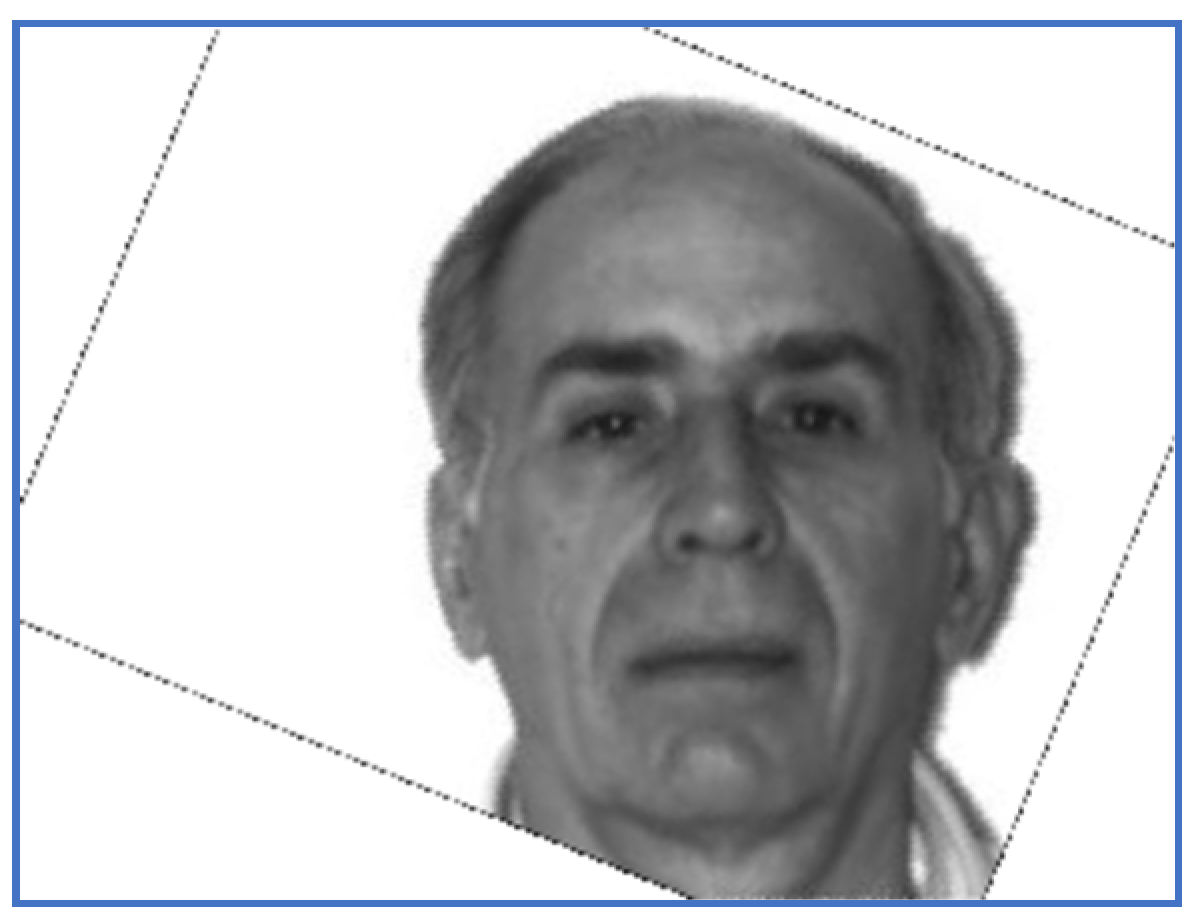
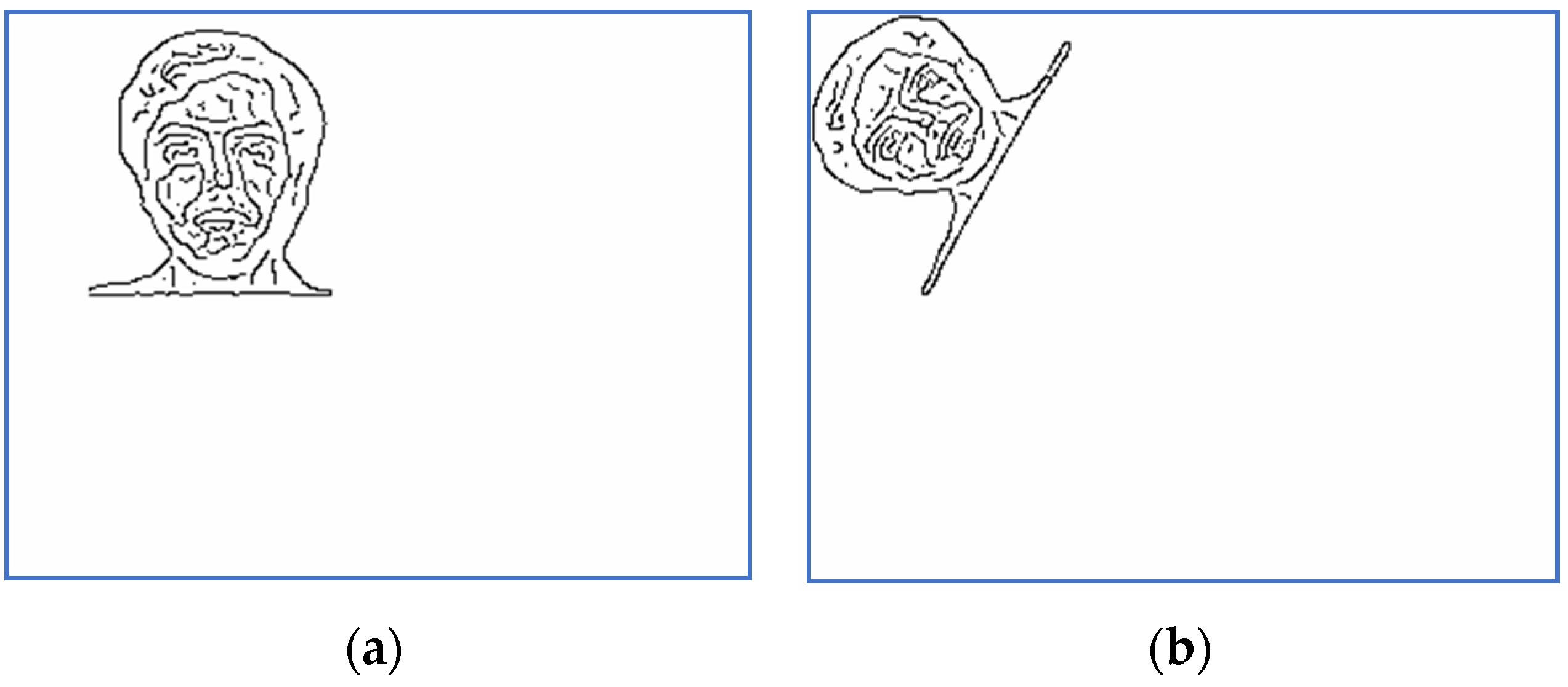
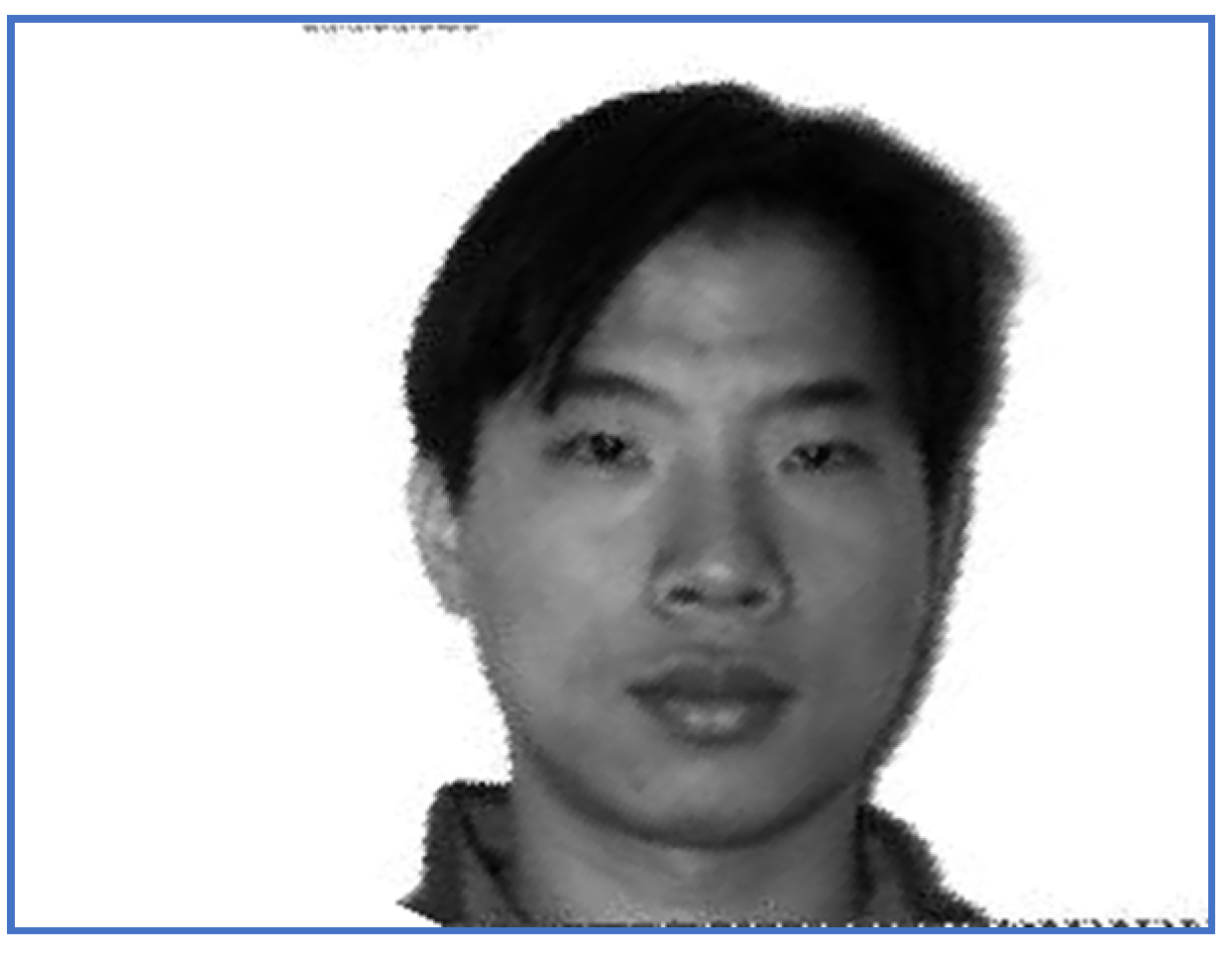
First, we provide a report regarding the new method proposed in
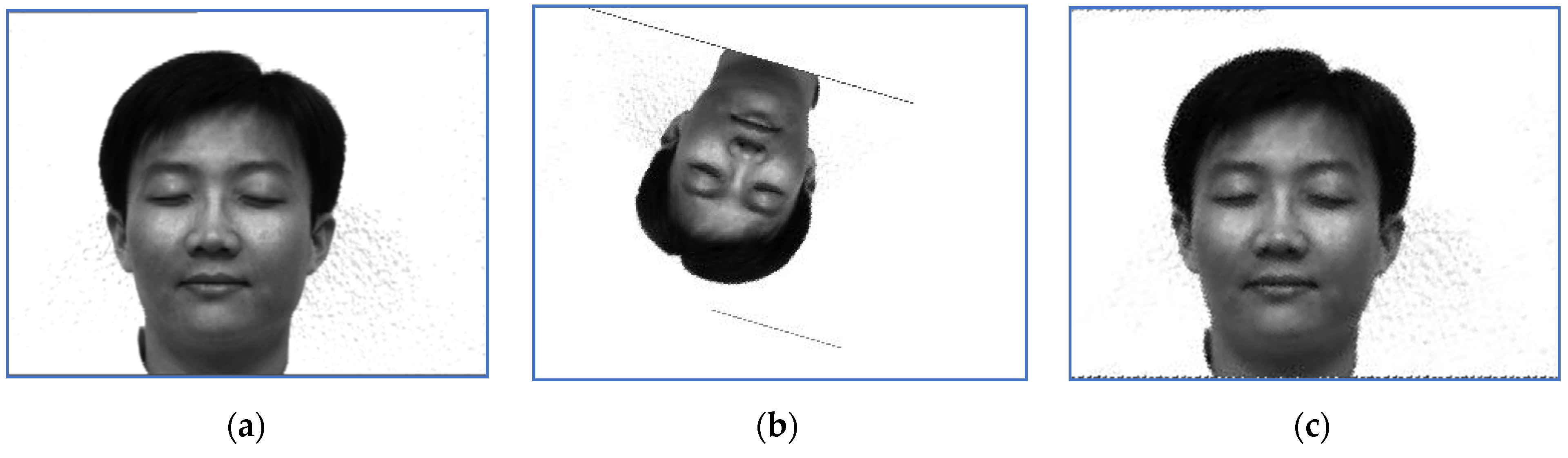
Section 3.4. Examples of target images, sensed ones and images obtained when the correct inverse rigid transformation is applied are presented in
Figure 1 (Subject 5, the first image, corresponding to Row 5 in
Table 2,
Table 3 and
Table 4) and
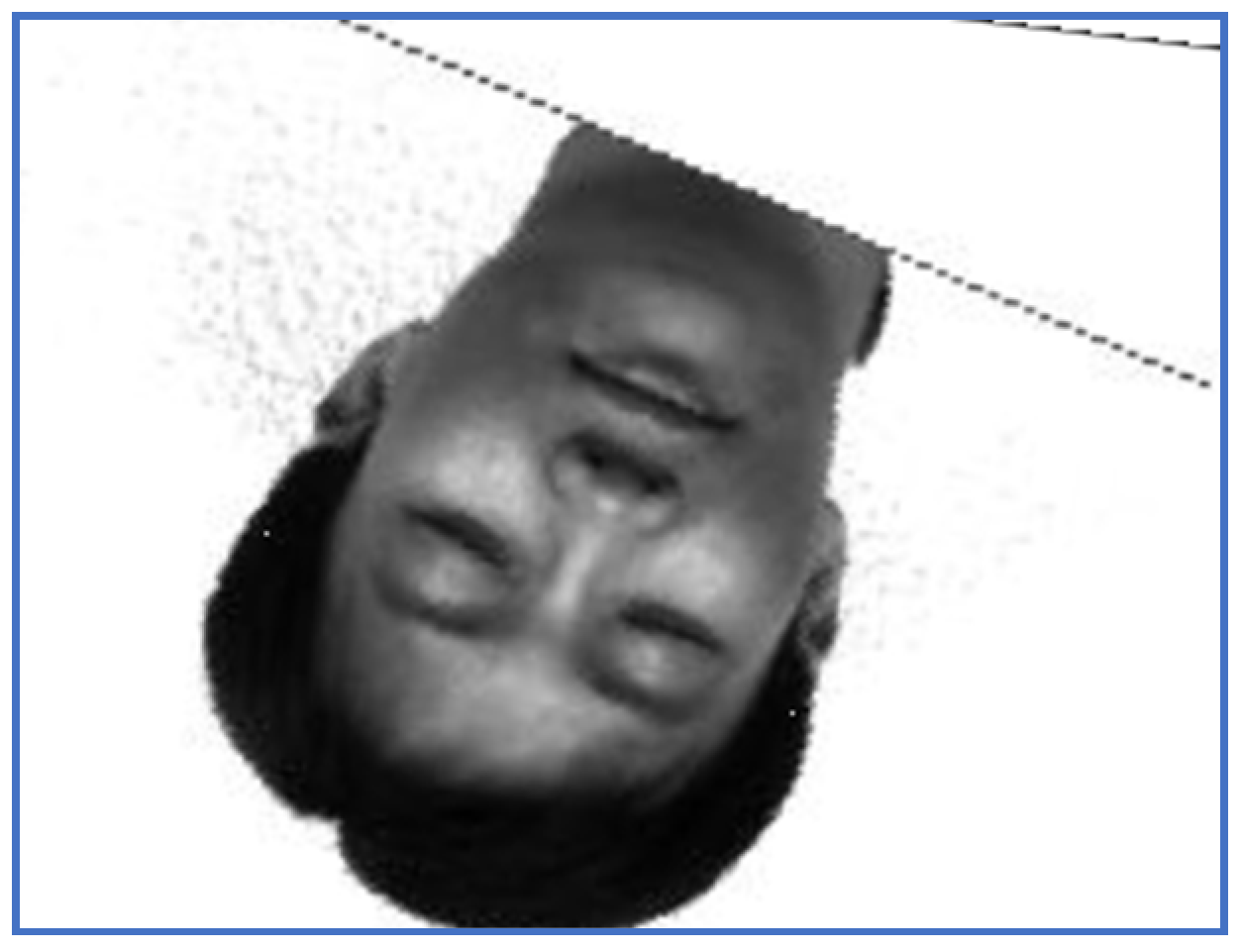
Figure 2 respectively (Subject 14, the second image, corresponding to Row 29 in
Table 2,
Table 3 and
Table 4).
The perturbation parameters are set as follows: the rotation angle is between
and 0, the scale factor was set in
, and the translation parameters are
and
. For instance, the target image displayed in
Figure 1 suffered a perturbation with the parameter vector
, while the one provided in
Figure 2 was perturbed by the rigid transformation with
.
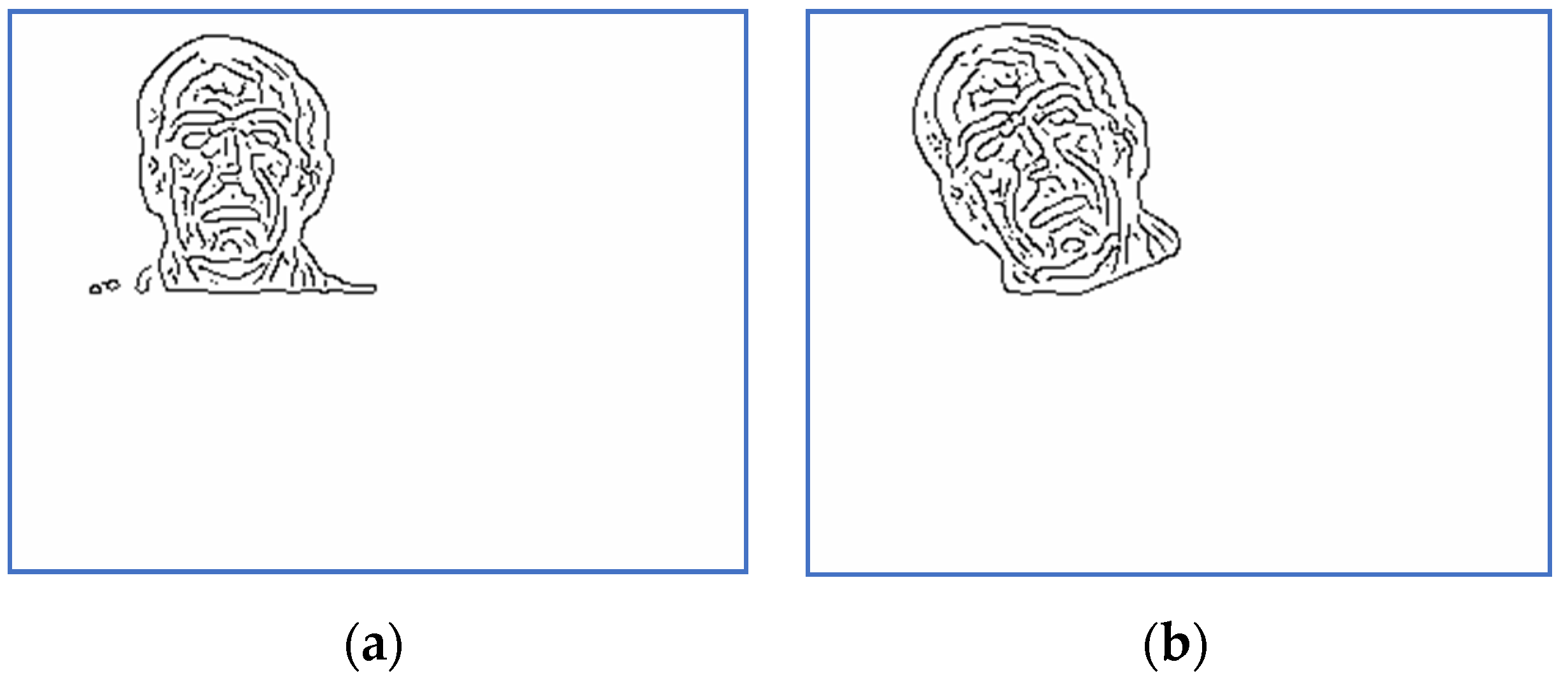
Scaled and binarized versions of the pairs (S, T) are computed by the preprocessing step. The corresponding versions of the images displayed in
Figure 1 and
Figure 2 are depicted in
Figure 3 and
Figure 4. The scaling factor used for this step is 2.
Next, the Algorithm 1 is applied, where the inputs are the images computed by the preprocessing step. The search space is computed using (19). In our test . The rest of the input parameters are set as follows: , , , , , , , , , , , , and .
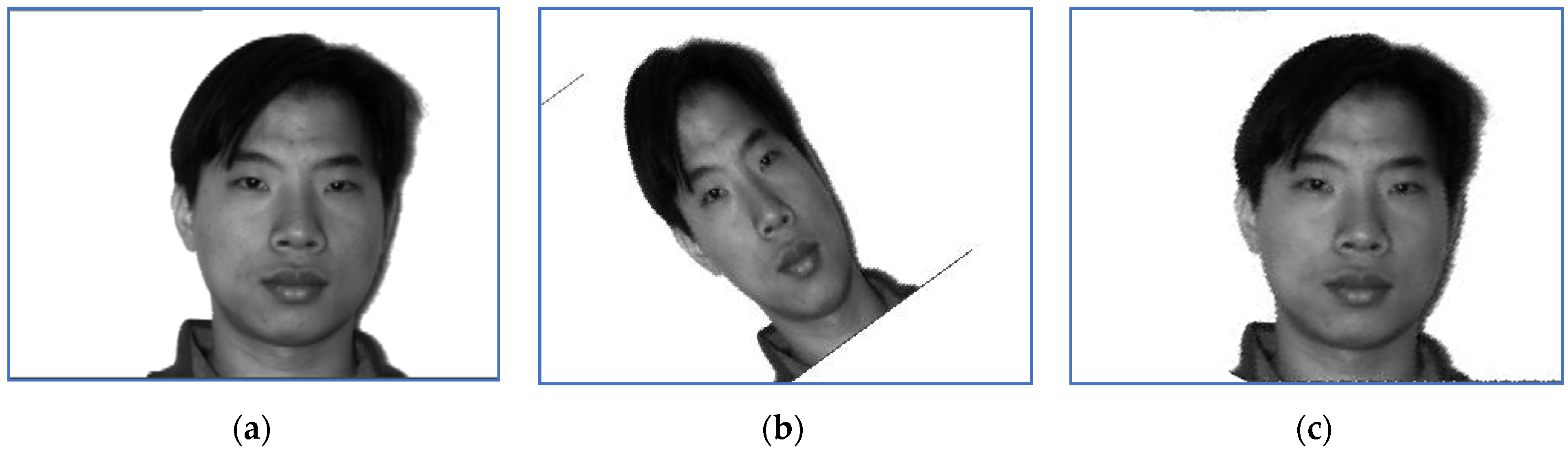
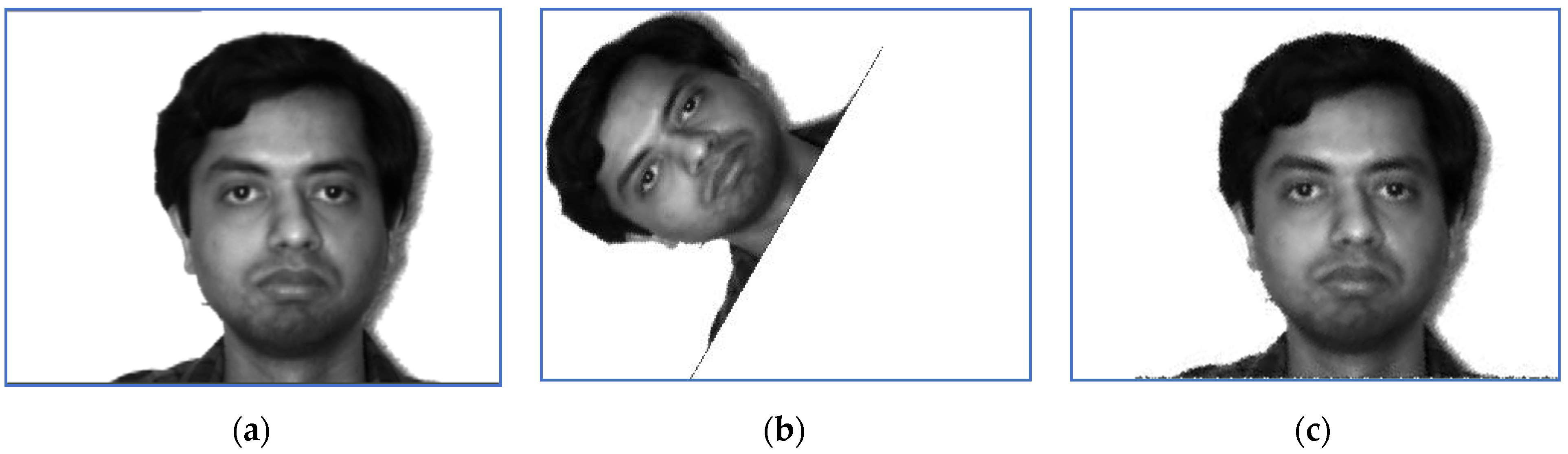
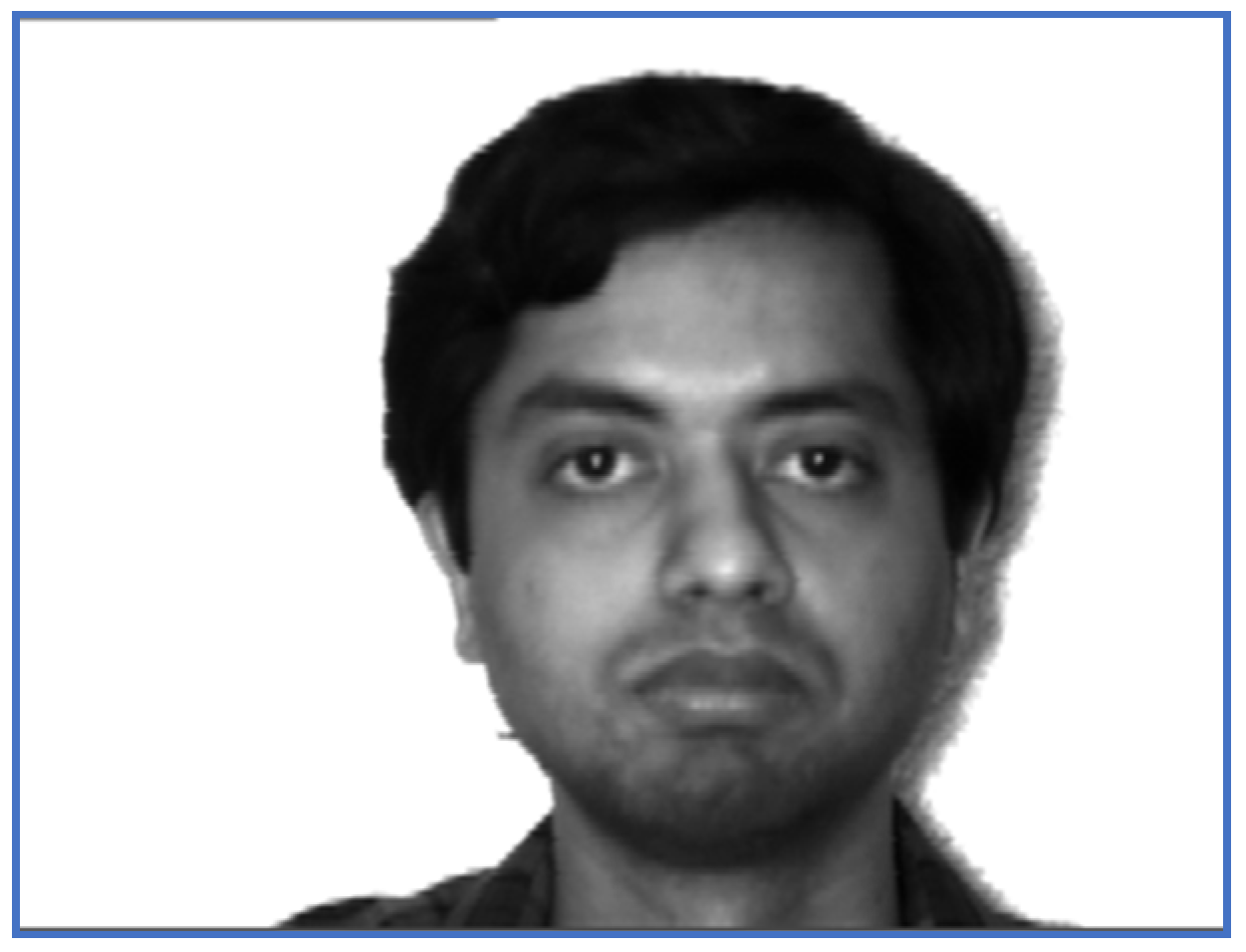
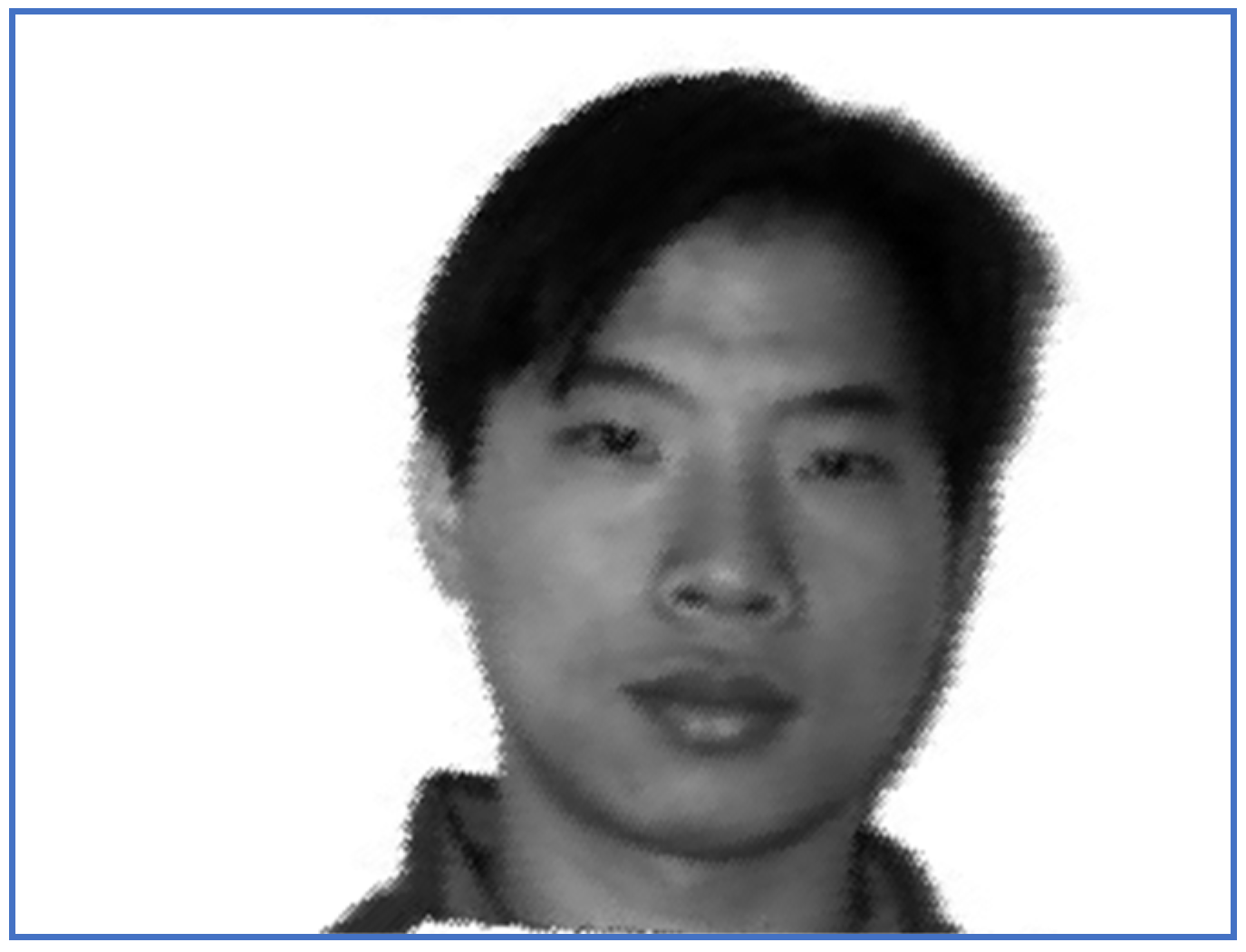
The results obtained by the proposed registration methodology are depicted in
Figure 5 and
Figure 6.
The accuracy and efficiency analysis are provided in
Table 2. Note that the results concerning the similarity measures
are computed by
where T is the target,
is the restored version computed by the proposed methodology, and T’ is the version obtained when the correct inverse rigid transformation is applied. In our tests,
Obviously, the ideal value of the ratios defined by (50) is 1. However, possible larger values may be obtained, due to calculation and rounding errors.
The success rate of the proposed method is 100% for all the tested images, and the SNR values are computed for images having the gray levels in .
In order to analyze the registration capabilities of the proposed method, we experimentally compared it against two of the most commonly used align procedures in case of rigid transformation, namely one plus one evolutionary optimizer (EO) [
21] and principal axes transform (PAT) [
22]. Note that the function EO was tested with 100 different parameter settings per pair of images to establish the best alignment from the similarity ratio point of view (48), where
. The registered images using PAT method are displayed in
Figure 7 and
Figure 8, while the results produced by EO are depicted in
Figure 9 and
Figure 10.
Note that PAT image alignment method has a widely known problem that in some cases produces results rotated 180 degrees along principal axes. In practice, this leads to some results being rotated upside-down. PAT stops at computing the aligned image and does not go further into analyzing if it is rotated or not, from a visual point of view. Some research [
36] aims to correct such results by automatically assessing which of the two possible rotations represents the correct image. In case of images rotated to the left with large angles, PAT and EO may fail to provide the correct alignment. In such cases, the ratios values are significantly smaller than one. In case of PAT registration, the run time values vary between 4 and 6 s, while EO method consumes significantly more time due to the need to establish the appropriate input parameters.
The results experimentally derived from a long series of tests lead to the conclusion that the proposed method outperforms PAT and EO from both accuracy points of view, informational and quantitative.
5.3. Monochrome Image Registration in Case of Scaling on Multiple Dimensions
The methodology introduced in
Section 3.5 has been applied on images belonging to Yale Face Database perturbed according to (36). The results are as follows.
Examples of target images, sensed ones and images obtained when the correct inverse rigid transformation is applied are presented in
Figure 11 (Subject 4, corresponding to Row 4 in
Table 5,
Table 6 and
Table 7) and
Figure 12 respectively (Subject 10, corresponding to Row 10 in
Table 5,
Table 6 and
Table 7).
The perturbation parameters are set as follows: the rotation angle is between
and 0, the scale factors were set in
, and the translation parameters are
and
. The target image displayed in
Figure 11 suffered a perturbation with the parameter vector
, while the one provided in
Figure 12 was perturbed by the rigid transformation with
.
The corresponding versions of scaled and binarized images displayed in
Figure 11 and
Figure 12 are depicted in
Figure 13 and
Figure 14. The scaling factor used for this step is two.
Next, the Algorithm 1 is applied, the input parameters being the same as those reported in
Section 5.2. The results obtained by the proposed registration methodology are depicted in
Figure 15 and
Figure 16.
The accuracy and efficiency analysis are provided in
Table 5. The results concerning the similarity measures
are computed by (40). The success rate of the proposed method is 100% for all the tested images,
and the SNR values are computed for images having the gray levels in
.
Note that PAT and EO algorithms lead to similar results as those reported in
Section 5.2. (
Figure 17,
Figure 18,
Figure 19 and
Figure 20). They fail to correctly perform the alignment from the rotation point of view, when the rotation angle is close to −180°. PAT may also misalign images in case of large magnitude distortions, mainly because the computation of the PAT solution involves arbitrary unitary matrices. Moreover, there are images with the same principal directions set and PAT cannot distinguish between them [
37].

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}