RCVC: RSU-Aided Cluster-Based Vehicular Clouds Architecture for Urban Areas


 , and
, and
Abstract
1. Introduction
- (1).
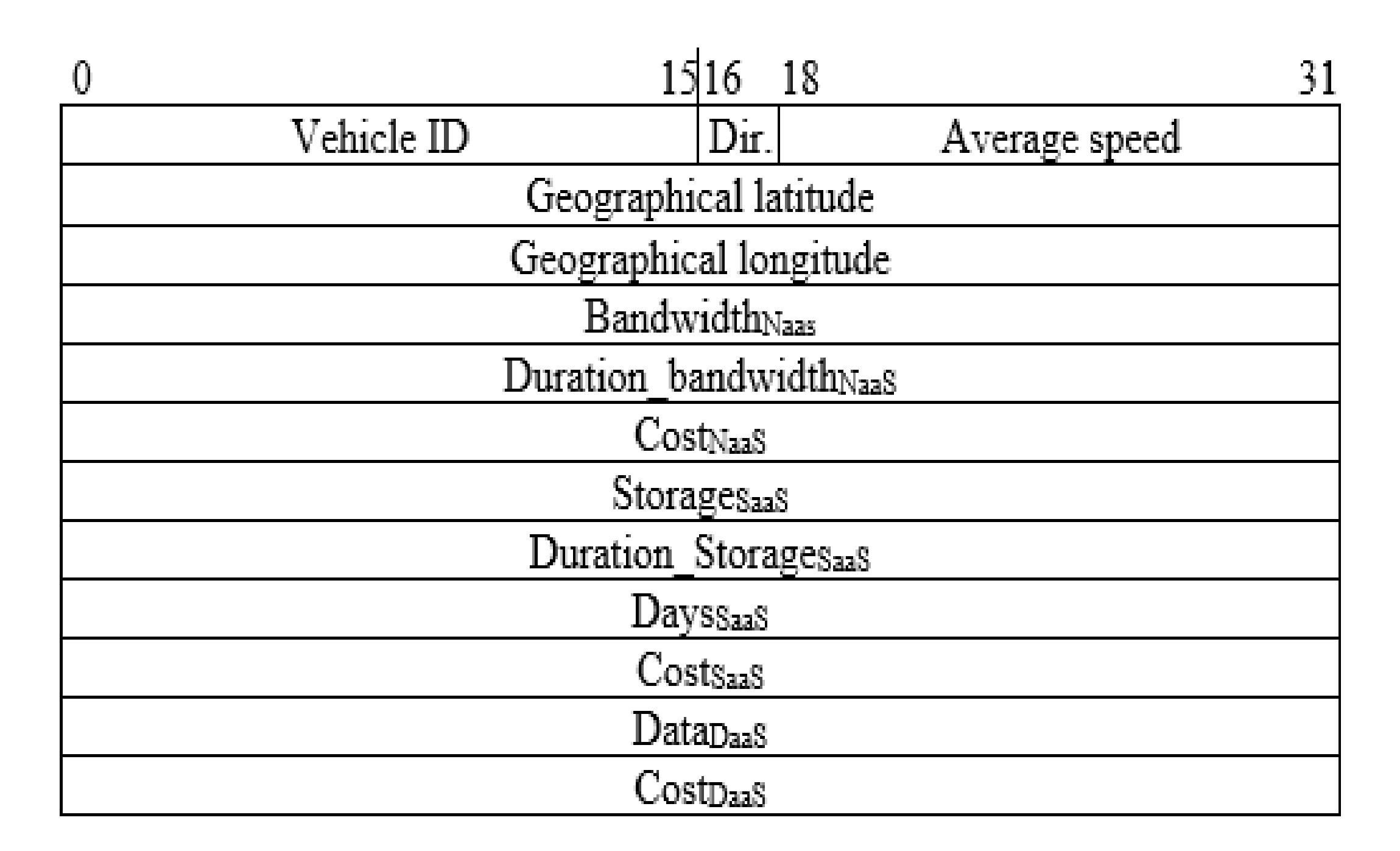
- Network as a Service (NaaS): it means to offer the extra bandwidth in terms of the Internet to others for a certain fee.
- (2).
- Storage as a Service (SaaS): it means to offer storage for a certain fee.
- (3).
- Data as a Service (DaaS): it means offering the data like books, city maps and video files for a certain fee as well.
2. Related Work
- (1).
- GaaS register: it is to save all data on the gateways.
- (2).
- GaaS dispatcher: it is to send the associated gateways for consumer vehicles.
3. Proposed Protocol
3.1. Mobile Cluster-Based Vehicular Cloud
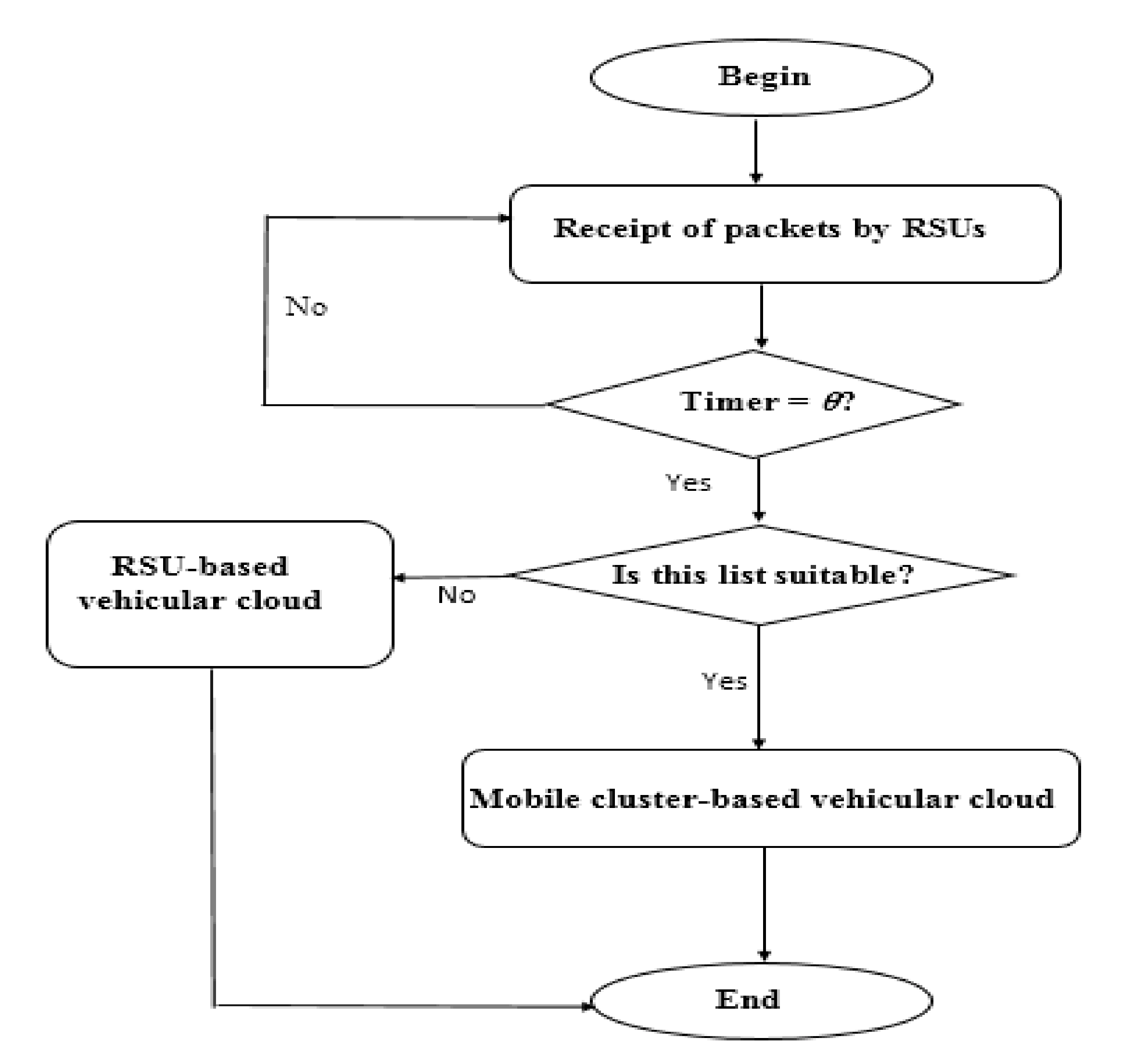
3.1.1. RSU Level Operation After θ
- (1).
- Reset the time θ.
- (2).
- Put all packets on the list.
- (3).
- If the list contains the same type of vehicles, either CVs or SVs, the RSU creates its proper directory.
- (4).
- If the list contains at least one SV or one CV and the sum of vehicles is higher than one (1), the RSU creates a cluster and selects its CH (described in Section 3.1.2).
- (5).
- Delete the list’s items in the directory after creating the cluster.
| Algorithm 1 RCVC process Pseudo-code, which checks the ability either to create a cluster or RSU’s cloud. |
| 1: input: stack temporary_cloud // temporary_cloud is a stack that contains the // temporary cloud built using the received packets. 2: stack RSU_cloud; 3: boolean find_supplier ← false; 4: boolean find_client ← false; 5: j ← θ; // It is a counter. 6: while j <= simulation time do 7: begin 8: for each V in temporary_cloud 9: begin 10: if V = "client" 11: begin 12: find_client ← true; 13: end if 14: if V = "supplier" 15: begin 16: find_supplier ← true; 17: end if 18: end for. 19: if (temporary_cloud.size() >= 2) and (find_client) and (find_supplier) 20: begin 21: create_cluster(temporary_cloud); // This function informs vehicles that // belong in the same cluster for cluster creation. 22: temporary_cloud.clear(); // This function deletes the temporary cloud. 23: end if 24: else 25: begin 26: for each item i in temporary_cloud 27: begin 28: RSU_cloud.push_back(i); // This function creates a cloud at RSU’s level. 29: end for 30: temporary_cloud.clear(); 31: end else 32: j ← j + θ; 33: end while |
3.1.2. Clustering
- There are some SVs whose queues contain only less than the value of the Queuecv variable. The latter is scalable according the global number of vehicles and SVs in a VC (it will be explained in the experimental).
- There are some SVs that can satisfy CVs requirements.
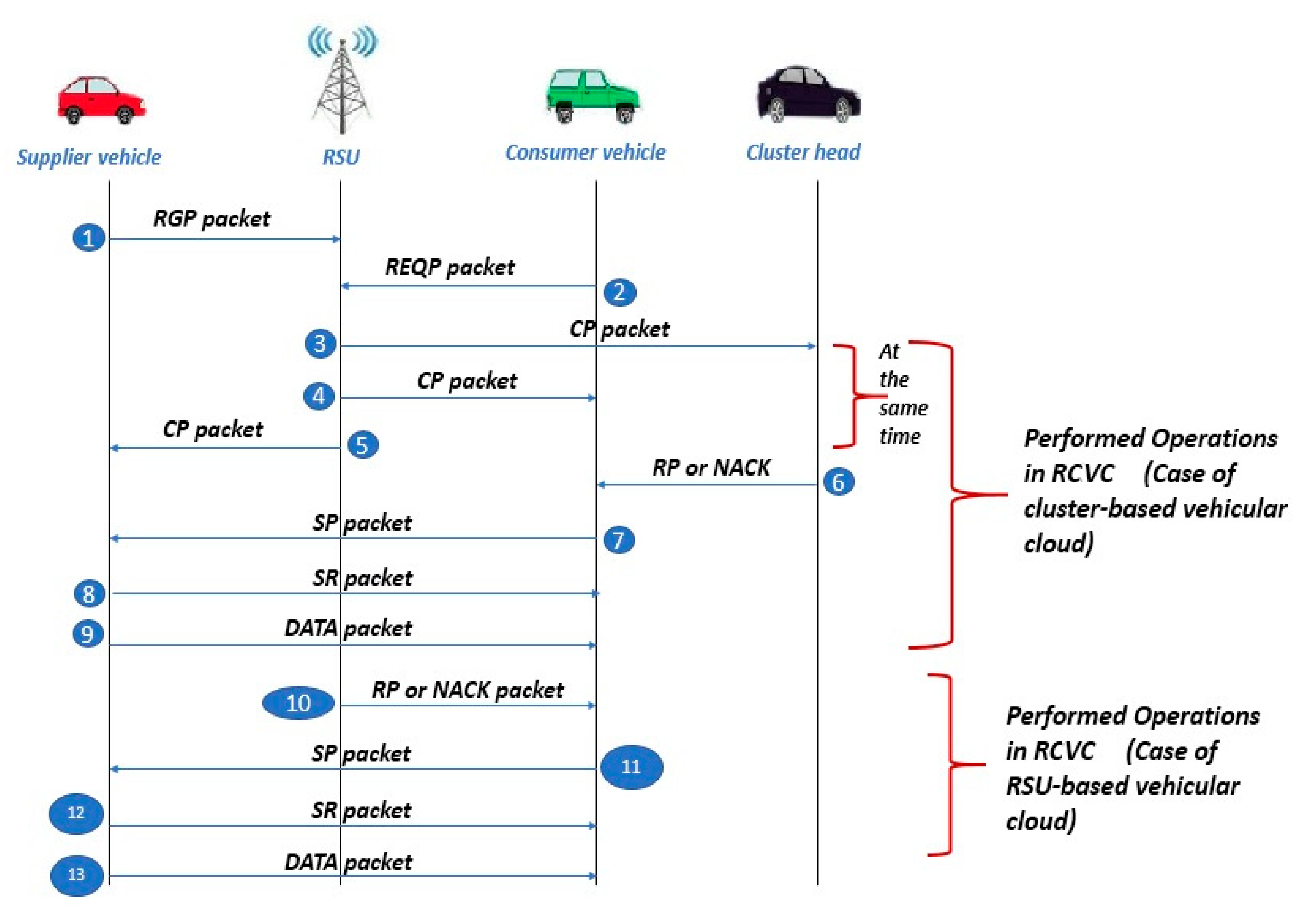
3.2. RSU-Based Vehicular Cloud
- (1).
- The ID of supplier vehicle.
- (2).
- Latest SV’s location from the latest beacon.
- (3).
- Resources and their attributes.
- (1).
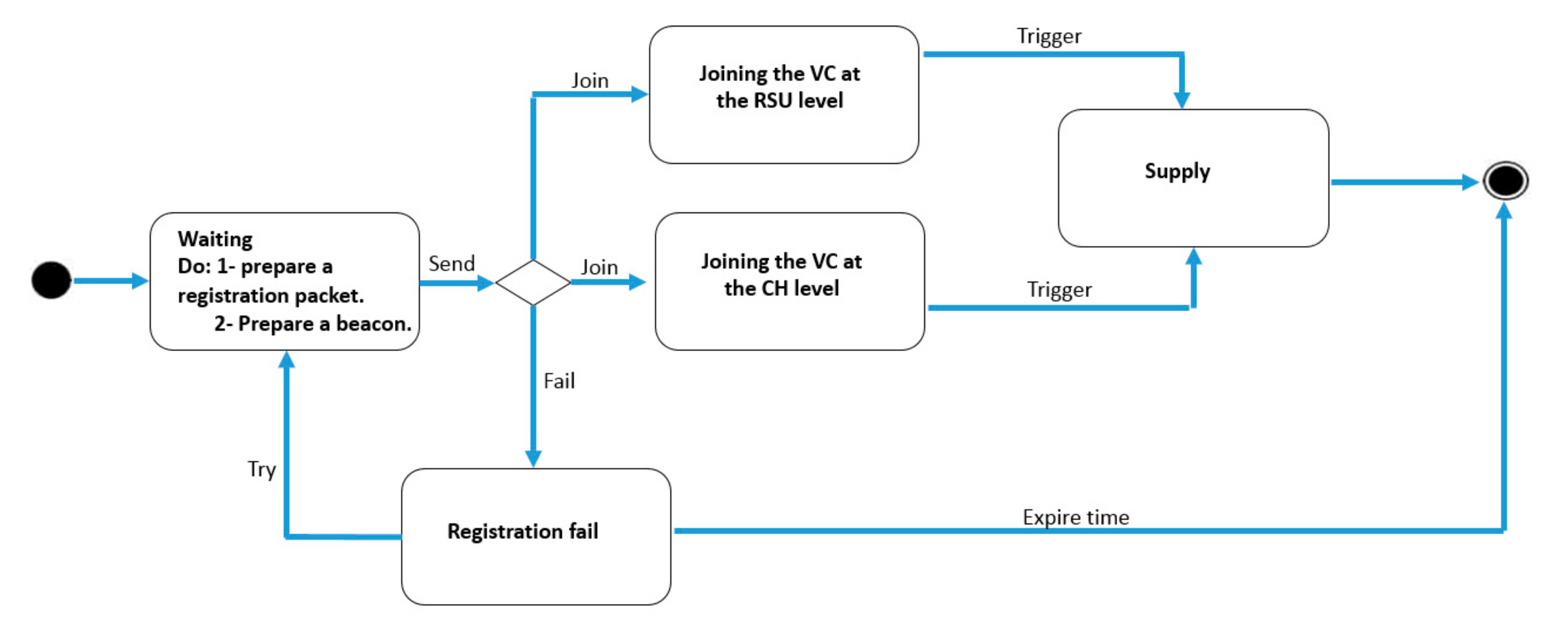
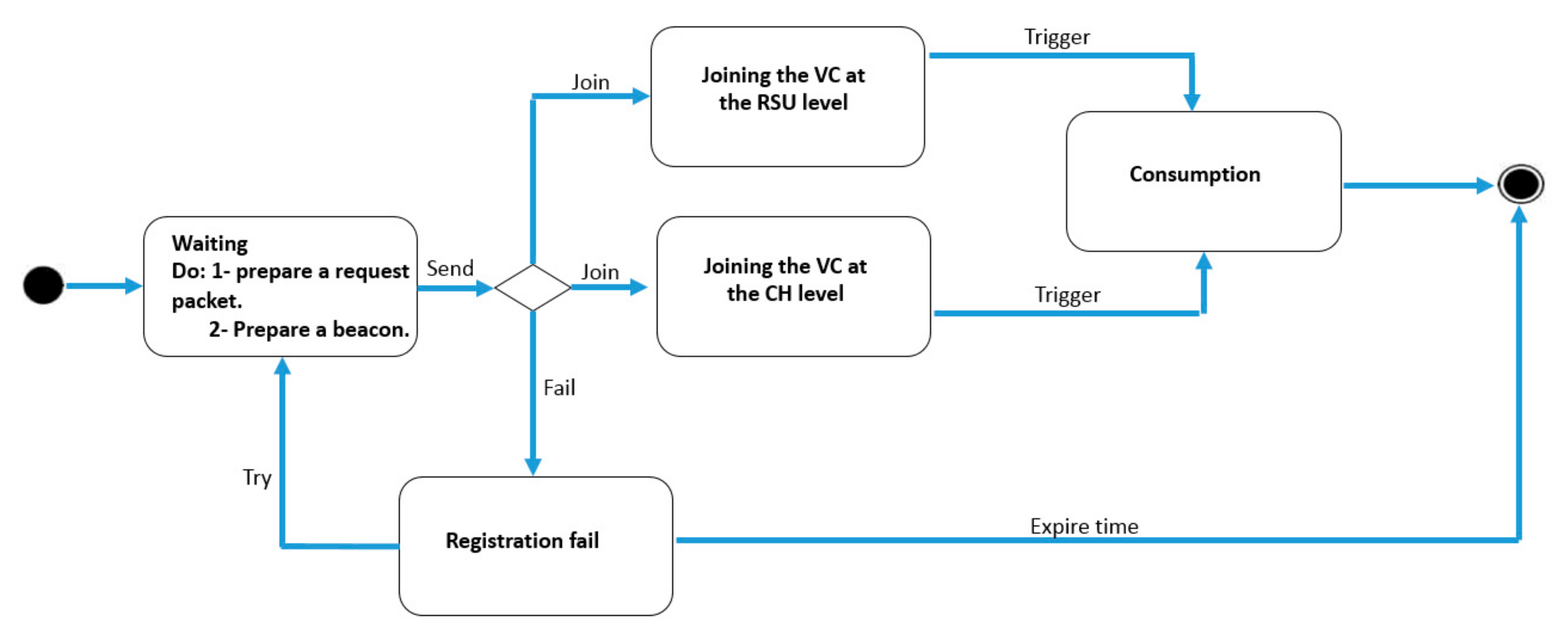
- Waiting: in this state, the object is waiting for the successful registration.
- (2).
- Joining the VC at the RSU level: it is the state where the object joined the VC at the RSU after a successful registration.
- (3).
- Joining the VC at the CH level: it is the state where the object joined the VC at the CH after a successful registration.
- (4).
- Supply: the object is in the state of providing services to CVs.
- (5).
- Consumption: the object is in the state of consuming services.
- (6).
- Registration fail: the registration attempt failed.
3.3. A Mathematical Model for Service Selection
3.3.1. Normalization
3.3.2. Performance Score
4. Experimental Analysis
4.1. Simulation Setup
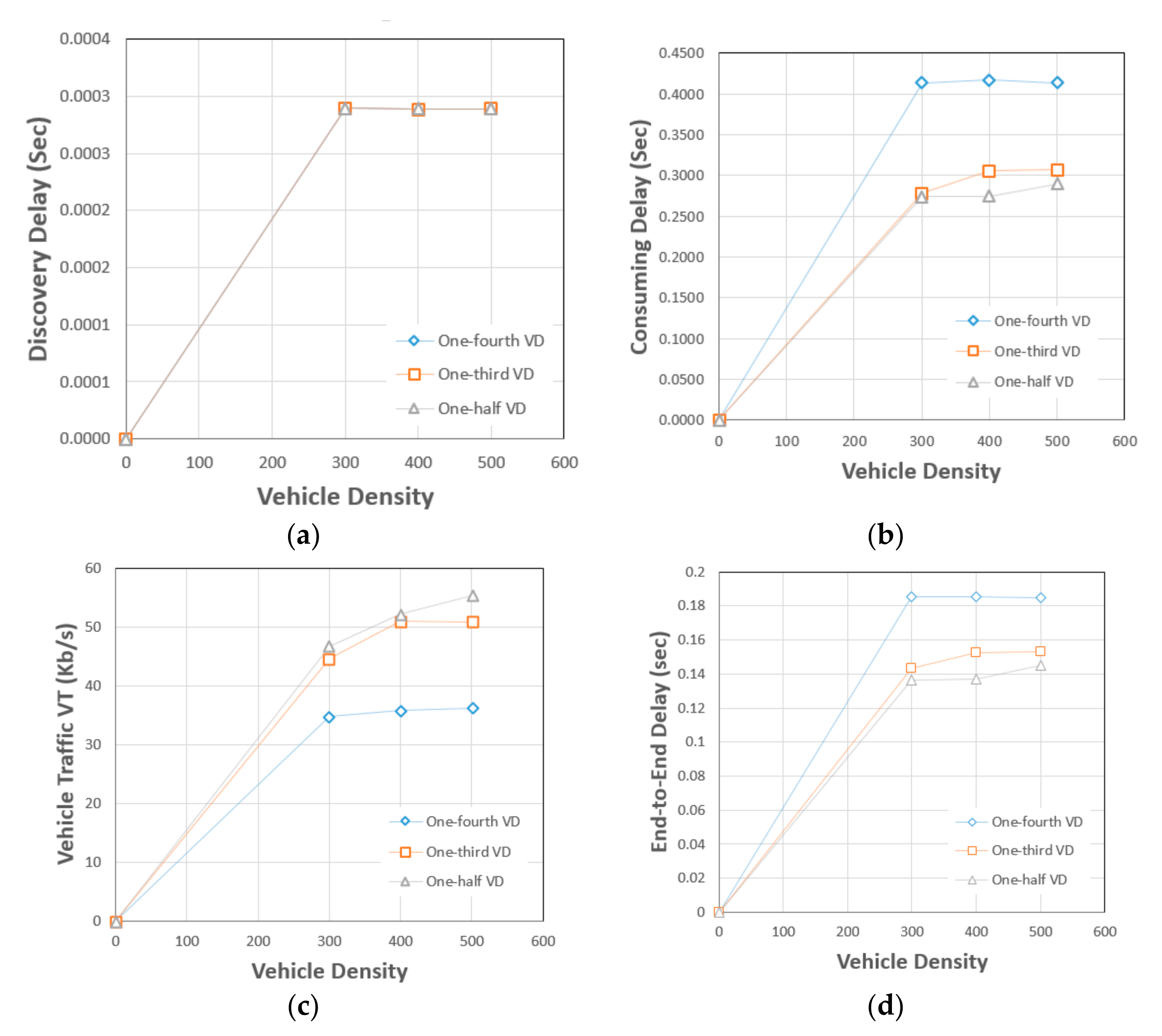
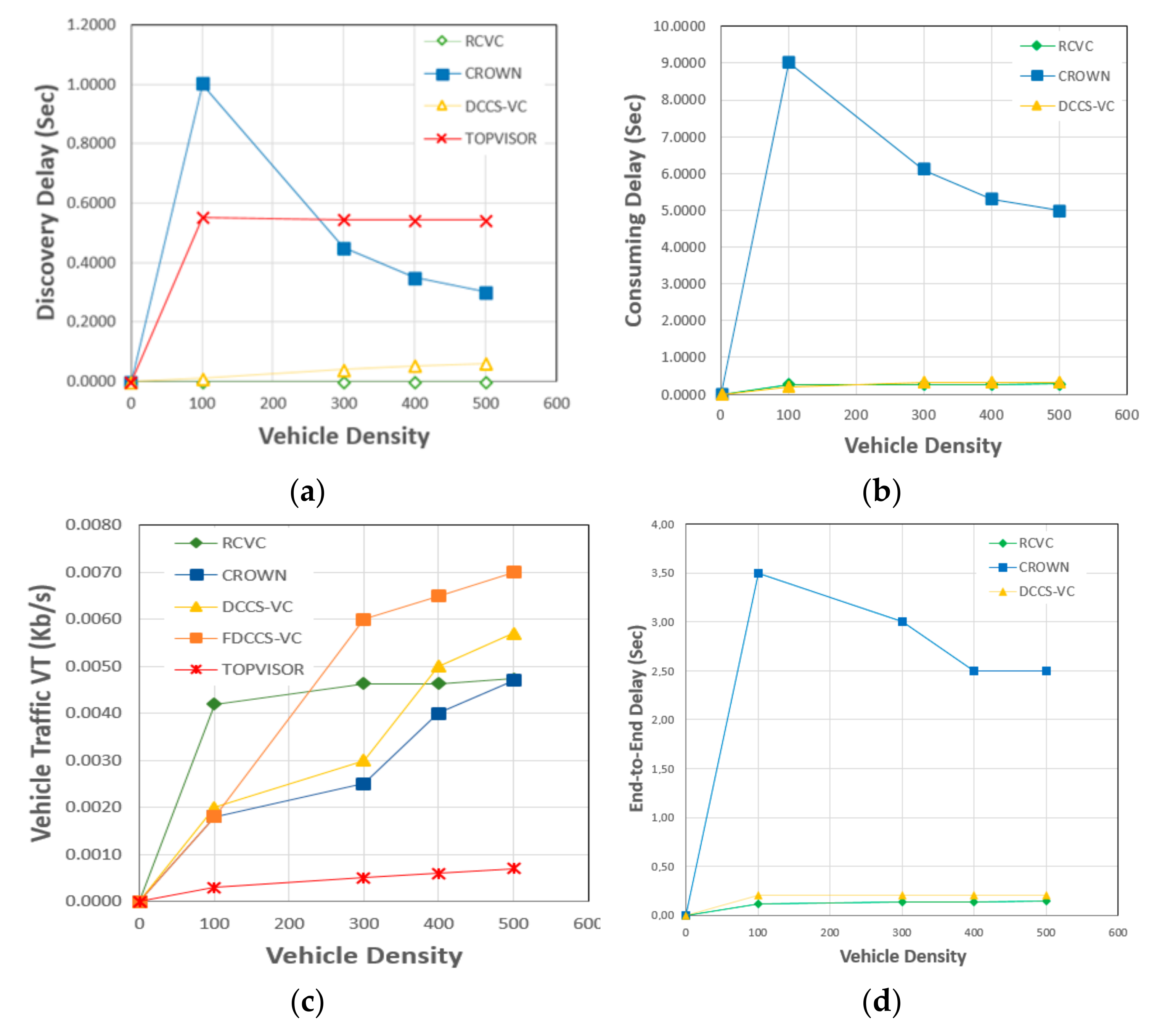
- (1)
- Discovery Delay (DD): the time delay between sending a request packet and receiving a response packet from RSU.
- (2)
- Consuming Delay (CD): the time delay between sending a request for resources to the SV and receiving three data packets.
- (3)
- Vehicle Traffic (VT): the average generated, received and forwarded amount of traffic by a vehicle.
- (4)
- End-to-End Delay (E2ED): the average time delay that a data packet takes to reach the CV from the SV through RSUs and CHs.
4.2. Results and Discussions
5. Conclusion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, L.; Liu, J.; Cheng, L.; Qiu, S.; Wang, W.; Zhang, X.; Zhang, Z. Creditcoin: A privacy-preserving blockchain-based incen-tive announcement network for communications of smart vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2204–2220. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Singh, P.K.; Nandi, S.K.; Nandi, S. A tutorial survey on vehicular communication state of the art, and future research direc-tions. Veh. Commun. 2019, 18, 100164. [Google Scholar]
- Elhalawany, B.M.; El-Banna, A.A.A.; Wu, K. Physical-Layer Security and Privacy for Vehicle-to-Everything. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Cheek, E.; Alghodhaifi, H.; Adam, C.; Andres, R.; Lakshmanan, S. Dedicated short range communications used as fail-safe in autonomous navigation. Available online: https://doi.org/10.1117/12.2558925 (accessed on 23 April 2020).
- Yogarayan, S.; Razak, S.F.A.; Azman, A.; Abdullah, M.F.A.; Ibrahim, S.Z.; Raman, K.J. A Review of Routing Protocols for Vehicular Ad-Hoc Networks (VANETs). In Proceedings of the 2020 8th International Conference on Information and Communication Technology (ICoICT), Yogyakarta, Indonesia, 24–26 June 2020; pp. 1–7. [Google Scholar]
- Skourletopoulos, G.; Mavromoustakis, C.X.; Mastorakis, G.; Batalla, J.M.; Dobre, C.; Panagiotakis, S.; Pallis, E. Big Data and Cloud Computing: A Survey of the State-of-the-Art and Research Challenges in Advances in Mobile Cloud Computing and Big Data in the 5G Era; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2017; pp. 23–41. [Google Scholar]
- Fernando, N.; Loke, S.W.; Rahayu, W. Mobile cloud computing: A survey. Futur. Gener. Comput. Syst. 2013, 29, 84–106. [Google Scholar] [CrossRef]
- Hagenauer, F.; Higuchi, T.; Altintas, O.; Dressler, F. Efficient data handling in vehicular micro clouds. Ad. Hoc. Netw. 2019, 91, 101871. [Google Scholar] [CrossRef]
- Brik, B.; Lagraa, N.; Lakas, A.; Ghamri-Doudane, Y. Finding a Public Bus to Rent out Services in Vehicular Clouds. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–7. [Google Scholar]
- Qureshi, K.N.; Bashir, F.; Iqbal, S. Cloud Computing Model for Vehicular Ad hoc Networks. In Proceedings of the 2018 IEEE 7th International Conference on Cloud Networking (CloudNet), Tokyo, Japan, 22–24 October 2018; pp. 1–3. [Google Scholar]
- Mershad, K.; Artail, H. Finding a STAR in a Vehicular Cloud. IEEE Intell. Transp. Syst. Mag. 2013, 5, 55–68. [Google Scholar] [CrossRef]
- Brik, B.; Lagraa, N.; Ghamri-Doudane, Y.; Lakas, A. Finding the most adequate public bus in Vehicular Clouds. In Proceedings of the 2016 International Conference on Wireless Networks and Mobile Communications (WINCOM), Fez, Morocco, 26–29 October 2016; pp. 67–74. [Google Scholar]
- Brik, B.; Lagraa, N.; Tamani, N.; Lakas, A.; Ghamri-Doudane, Y. Renting Out Cloud Services in Mobile Vehicular Cloud. IEEE Trans. Veh. Technol. 2018, 67, 9882–9895. [Google Scholar] [CrossRef]
- Arkian, H.R.; Atani, R.E.; Kamali, S. FcVcA: A fuzzy clustering-based vehicular cloud architecture. In Proceedings of the 2014 7th International Workshop on Communication Technologies for Vehicles (Nets4Cars-Fall), St. Petersburg, Russia, 6–8 October 2014; pp. 24–28. [Google Scholar]
- Arkian, H.R.; Atani, R.E.; Diyanat, A.; Pourkhalili, A. A cluster-based vehicular cloud architecture with learning-based re-source management. J. Supercomput. 2015, 71, 1401–1426. [Google Scholar] [CrossRef]
- Azizian, M.; Cherkaoui, S.; Hafid, A. An Optimized Flow Allocation in Vehicular Cloud. IEEE Access 2016, 4, 6766–6779. [Google Scholar] [CrossRef]
- Hussain, R.; Abbas, F.; Son, J.; Kim, D.; Kim, S.; Oh, H. Vehicle Witnesses as a Service: Leveraging Vehicles as Witnesses on the Road in VANET Clouds. In Proceedings of the 2013 IEEE 5th International Conference on Cloud Computing Technology and Science, Bristol, UK, 2–5 December 2013; pp. 439–444. [Google Scholar]
- Lin, Y.-W.; Shen, J.-M.; Weng, H.-C. Cloud-Supported Seamless Internet Access in Intelligent Transportation Systems. Wirel. Pers. Commun. 2013, 72, 2081–2106. [Google Scholar] [CrossRef]
- Kaleibar, F.J.; Abbaspour, M. TOPVISOR: Two-level controller-based approach for service advertisement and discovery in vehicular cloud network. Int. J. Commun. Syst. 2020, 33, e4197. [Google Scholar] [CrossRef]
- Nagel, R.; Eichler, S. Efficient and Realistic Mobility and Channel Modeling for VANET Scenarios using OMNeT++ and INET-Framework. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communica-Tions, Networks and Systems & Workshops, Marseille, France, 3 March 2008; pp. 1–8. [Google Scholar]
- Bouhmala, N. How Good is the Euclidean Distance Metric for the Clustering Problem. In Proceedings of the 2016 5th IIAI International Congress on Advanced Applied Informatics (IIAI-AAI), Kumamoto, Japan, 10–14 July 2016; pp. 312–315. [Google Scholar]
- Kerrache, C.A.; Lagraa, N.; Calafate, C.T.; Lakas, A. TFDD: A trust-based framework for reliable data delivery and DoS de-fense in VANETs. Veh. Commun. 2017, 9, 254–267. [Google Scholar] [CrossRef]
- Hwang, C.L.; Kwangsun, Y. Multiple criteria decision making. Lect. Notes Econ. Math. Syst. 1981, 186, 58–191. [Google Scholar]
- Afshari, A.; Mojahed, M.; Yusuff, R.M. Simple additive weighting approach to personnel selection problem. Int. J. Innov. Manag. Technol. 2010, 1, 511. [Google Scholar]
- Omnet++ Network Simulation Framework. Available online: http://www.omnetpp.org (accessed on 12 May 2019).
- Sumo, Simulation for Urban Mobility. Available online: http://sourceforge.net/apps/mediawiki/sumo (accessed on 4 December 2019).
- Mavromatis, I.; Tassi, A.; Piechocki, R.J.; Sooriyabandara, M. On Urban Traffic Flow Benefits of Connected and Automated Vehicles. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–7. [Google Scholar]
- Qi, L.; Gonzalez, C. Math matters: Mathematical knowledge plays an essential role in Chinese undergraduates’ stock-and-flow task performance. Syst. Dyn. Rev. 2019, 35, 208–231. [Google Scholar] [CrossRef]
- Mershad, K.; Artail, H.; Gerla, M. We Can Deliver Messages to Far Vehicles. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1099–1115. [Google Scholar] [CrossRef]
- Li, T.; Hazra, S.K.; Seah, W. A Position-Based Routing Protocol for Metropolitan Bus Networks. In Proceedings of the 2005 IEEE 61st Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; pp. 2315–2319. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Current State | Event | Action | Next State |
|---|---|---|---|
| Initial state | Ready to register | Waiting | |
| Waiting | Join | Registration successful | Joining at RSU level |
| Join | Registration successful | Joining at CH level | |
| Fail | Registration failed | Registration fail | |
| Joining at RSU level | Trigger | Ready to supply services | Supply |
| Joining at CH level | Trigger | Ready to supply services | Supply |
| Supply | End of supply | Final state | |
| Registration fail | Try | Attempt registration | Waiting |
| Expire time | Cancel registration | Final state | |
| Final state | Idle |
| Current State | Event | Action | Next State |
|---|---|---|---|
| Initial state | Attempt registration | Waiting | |
| Waiting | Join | Registration successful | Joining at RSU level |
| Join | Registration successful | Joining at CH level | |
| Fail | Registration failed | Registration fail | |
| Joining at RSU level | Trigger | Trigger consumption | Consumption |
| Joining at CH level | Trigger | Trigger consumption | Consumption |
| Consumption | End of consumption | Final state | |
| Registration fail | Try | Attempt registration | Waiting |
| Expire time | Cancel registration | Final state | |
| Final state | Idle |
| Criteria | Definition | Type |
|---|---|---|
| BandwidthNaas | Access bandwidth. | Double (bit/s) |
| Duration_bandwidthNaaS | The offered access bandwidth duration. | Double (h) |
| CostNaaS | The offered bandwidth unit price. | Double ($) |
| StorageSaaS | Offered storage. | Double (Mo) |
| Duration_StorageSaaS | The offered storage duration. | Double (h) |
| DaysSaaS | Maximum overall storage time. | Double (Days) |
| CostSaaS | The offered storage unit price. | Double ($) |
| DataDaaS | Data capacity. | Double (Mo) |
| CostDaaS | The offered data unit price. | Double ($) |
| Parameter | Value |
|---|---|
| Simulation framework | Veins (OMNeT++ and Sumo) |
| Mobility model | Manhattan |
| Simulation time | 1000 s |
| Simulation area | 4 × 4 km2 |
| Transmission range | 500 m |
| Transfer rate | 18 Mb/s |
| Vehicle density | [100–500] vehicles |
| Vehicles speed | Up to 70 km/h |
| Supplier vehicle density | 1/4, 1/3 and 1/2 of vehicle density |
| The size of registration and request packet | 128 Kbytes |
| Data Packet Size | [1–5] Kbytes |
| Maximum number of offered services per supplier | Three (3) services |
| Maximum number of requested services per consumer | Three (3) services |
| The distance between the vehicle and the next RSU (meters). | 200 | 400 | 600 | 800 | 1000 |
| The elapsed time to arrive near to the next RSU (minutes). | 0.5 | 1 | 1.5 | 2 | 2.5 |
| Number of vehicles in a cluster | 2 to 5 | 5 to 10 | 10 to 15 | 15 to 20 | 20 to 25 | 25 to 30 |
| Sufficient number of hops | 1 | 2 | 3 | 4 | 5 | 6 |
| DD | CD | VT | E2ED | |
|---|---|---|---|---|
| RCVC | 1 | 1 | 3 | 1 |
| CROWN | 3 | 3 | 2 | 3 |
| DCCS-VC | 2 | 2 | 4 | 2 |
| FDCCS-VC | - | - | 5 | - |
| TOPVISOR | 4 | - | 1 | - |
| DD | CD | VT | E2ED | |
|---|---|---|---|---|
| RCVC | 1 | 1 | 0.5 | 1 |
| CROWN | 0.33 | 0 | 0.75 | 0 |
| DCCS-VC | 0.67 | 0.33 | 0.25 | 0.33 |
| FDCCS-VC | - | - | 0 | - |
| TOPVISOR | 0 | - | 0.8 | - |
| Weightage | 0.25% | 0.25% | 0.25% | 0.25% | 100% |
|---|---|---|---|---|---|
| DD | CD | VT | E2ED | Performance Score | |
| RCVC | 0.25 | 0.25 | 0.125 | 0.25 | 0.87% |
| CROWN | 0.08 | 0 | 0.19 | 0 | 0.27% |
| DCCS-VC | 0.17 | 0.08 | 0.06 | 0.08 | 0.40% |
| FDCCS-VC | - | - | 0 | - | 0% |
| TOPVISOR | 0 | - | 0,2 | - | 0.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben bezziane, M.; Korichi, A.; Kerrache, C.A.; Fekair, M.e.A. RCVC: RSU-Aided Cluster-Based Vehicular Clouds Architecture for Urban Areas. Electronics 2021, 10, 193. https://doi.org/10.3390/electronics10020193
Ben bezziane M, Korichi A, Kerrache CA, Fekair MeA. RCVC: RSU-Aided Cluster-Based Vehicular Clouds Architecture for Urban Areas. Electronics. 2021; 10(2):193. https://doi.org/10.3390/electronics10020193
Chicago/Turabian StyleBen bezziane, Mohamed, Ahmed Korichi, Chaker Abdelaziz Kerrache, and Mohamed el Amine Fekair. 2021. "RCVC: RSU-Aided Cluster-Based Vehicular Clouds Architecture for Urban Areas" Electronics 10, no. 2: 193. https://doi.org/10.3390/electronics10020193
APA StyleBen bezziane, M., Korichi, A., Kerrache, C. A., & Fekair, M. e. A. (2021). RCVC: RSU-Aided Cluster-Based Vehicular Clouds Architecture for Urban Areas. Electronics, 10(2), 193. https://doi.org/10.3390/electronics10020193