
Theoretical Computational Model for Cylindrical Permanent Magnet Coupling


Abstract
:1. Introduction
2. Theoretical Model
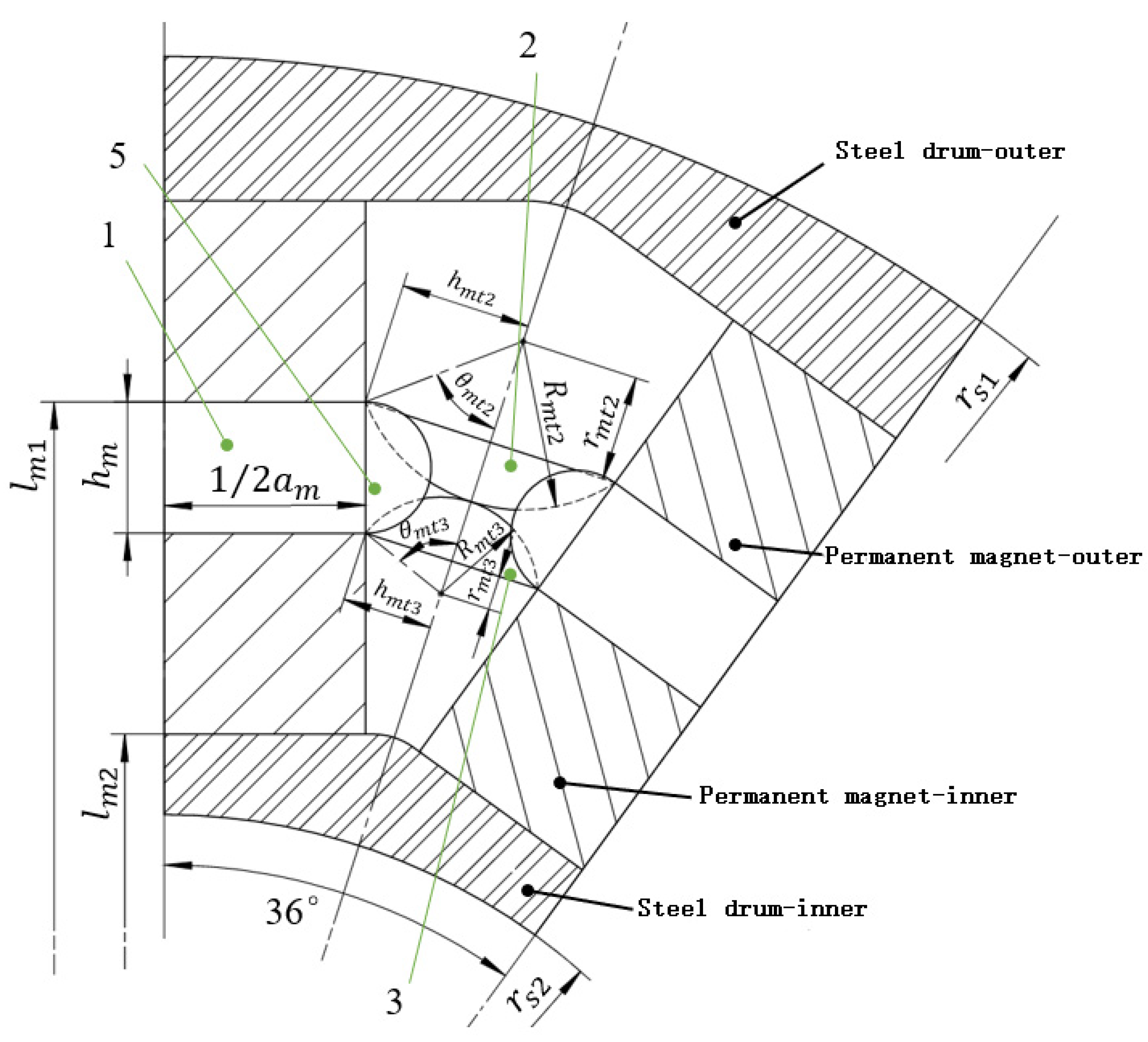
2.1. Magnetic Field Division
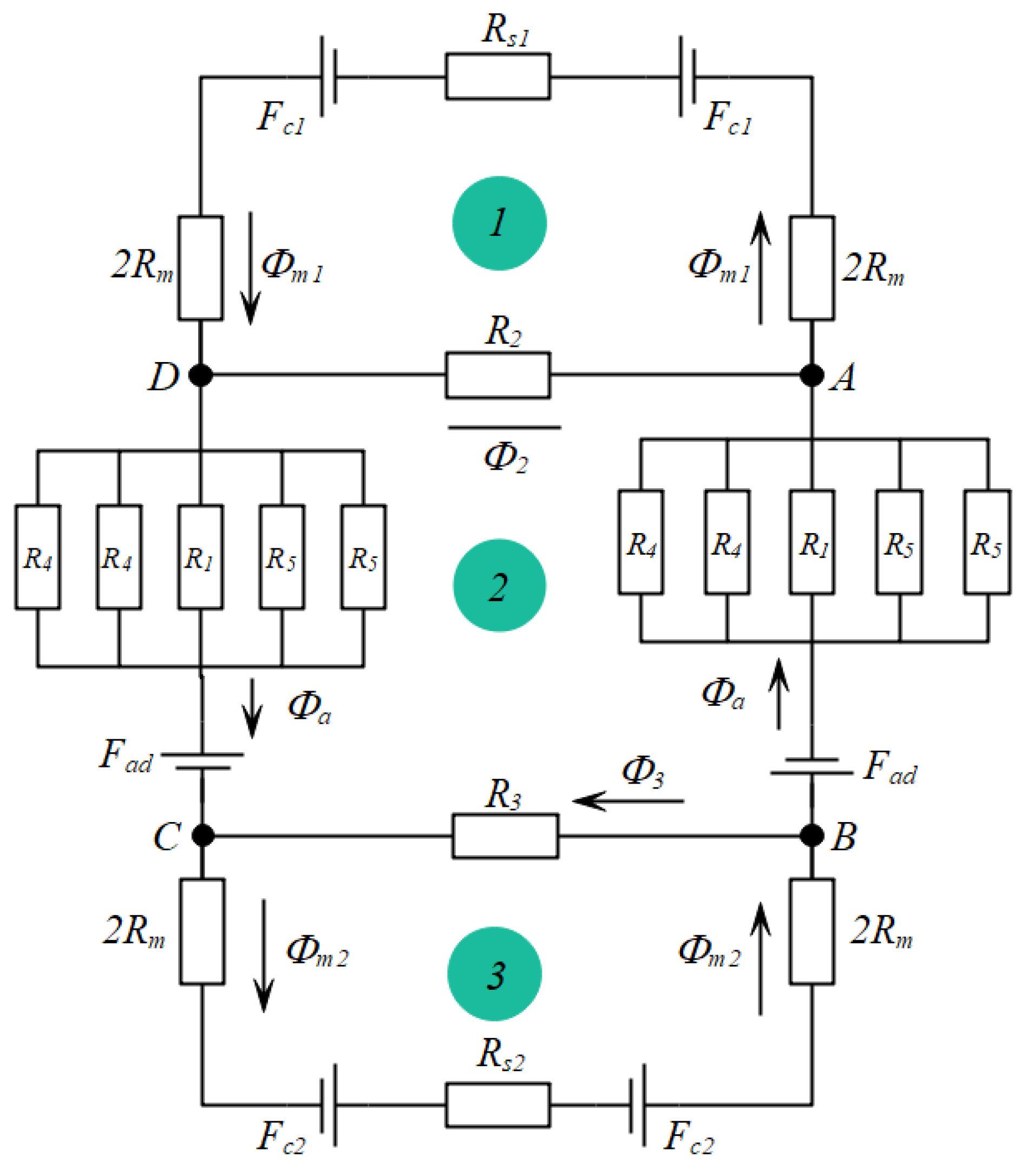
2.2. Equivalent Magnetic Circuit Model
2.3. Torque Calculation
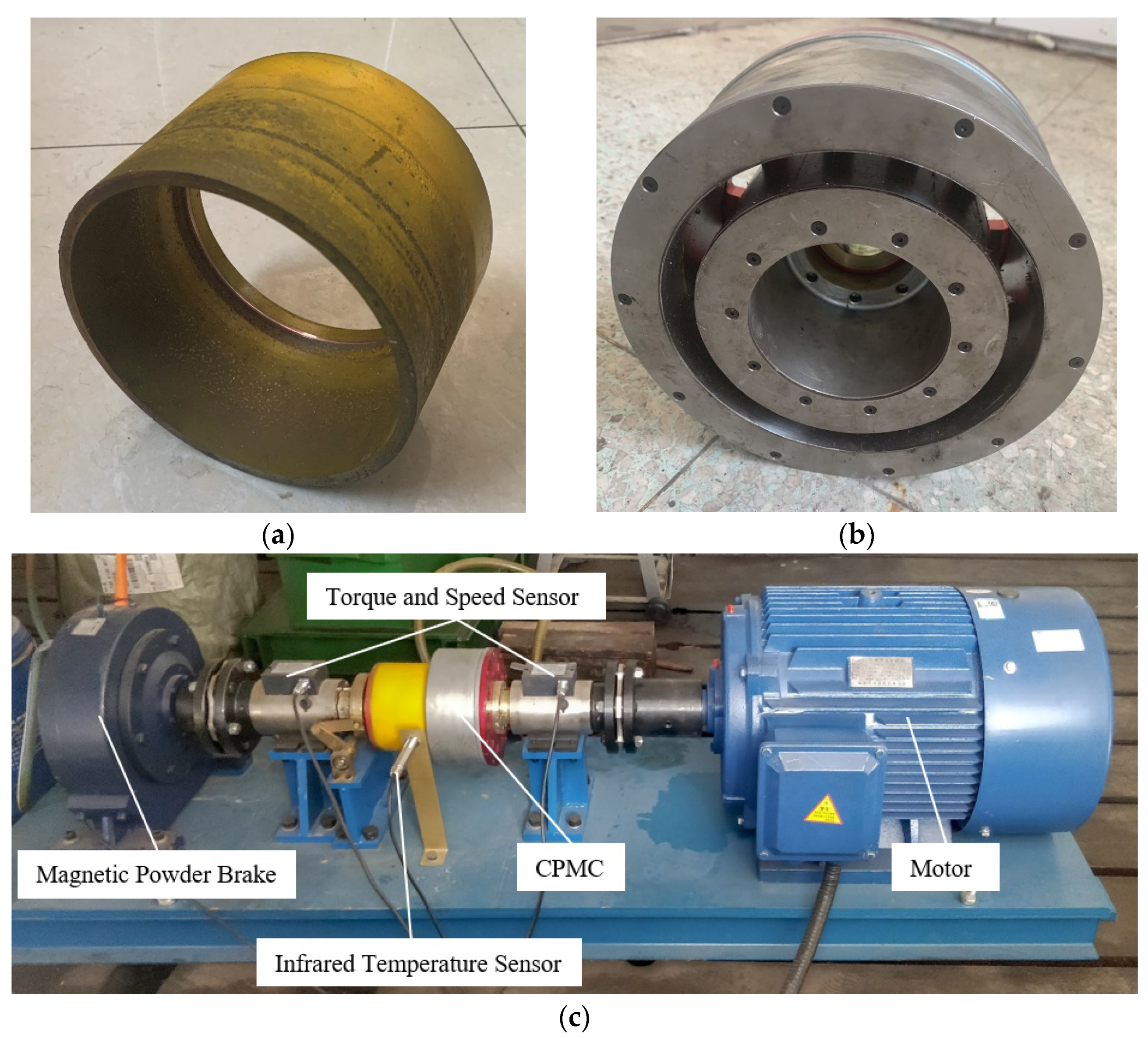
3. Simulation and Experimental Evaluation
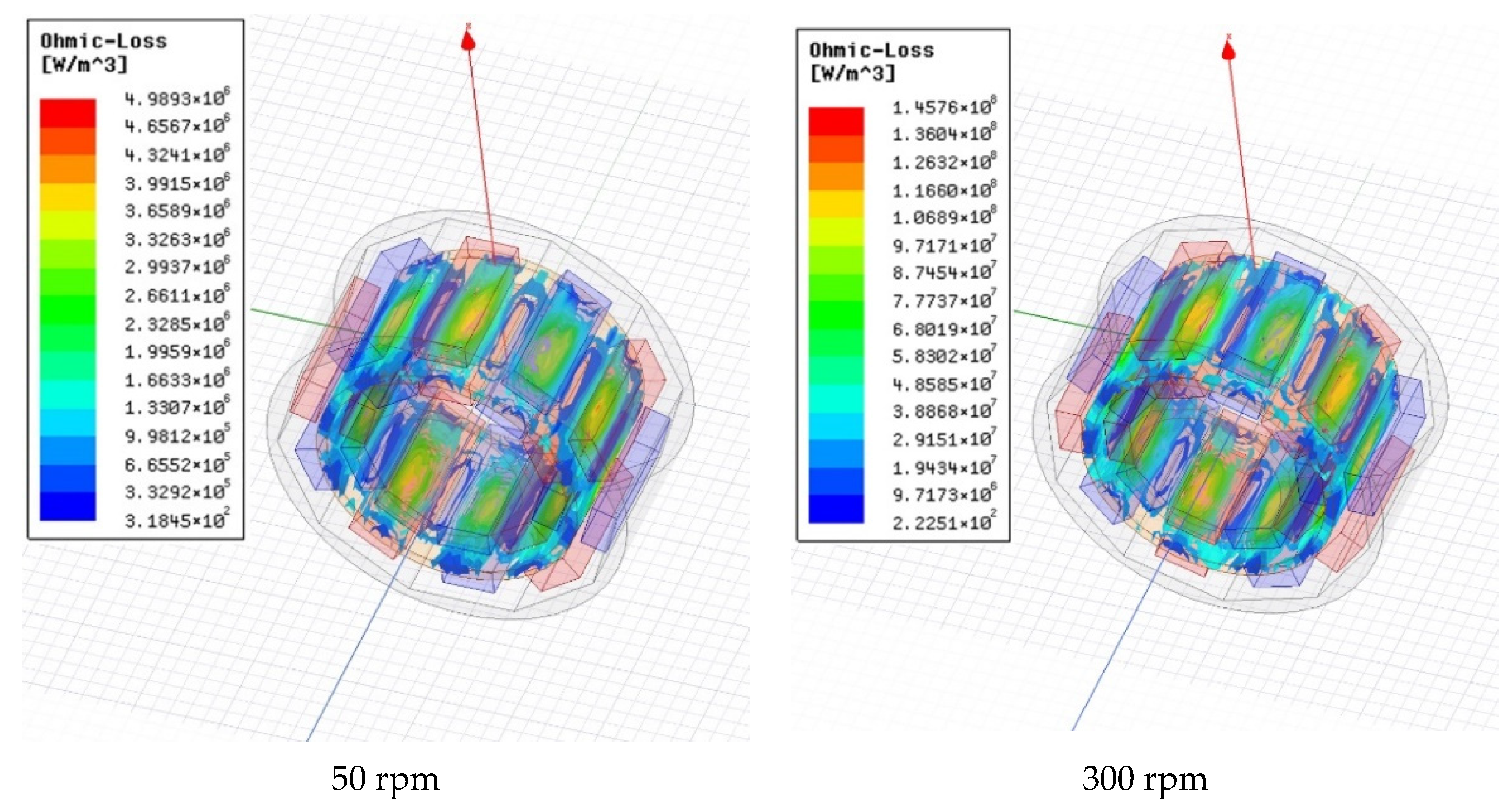
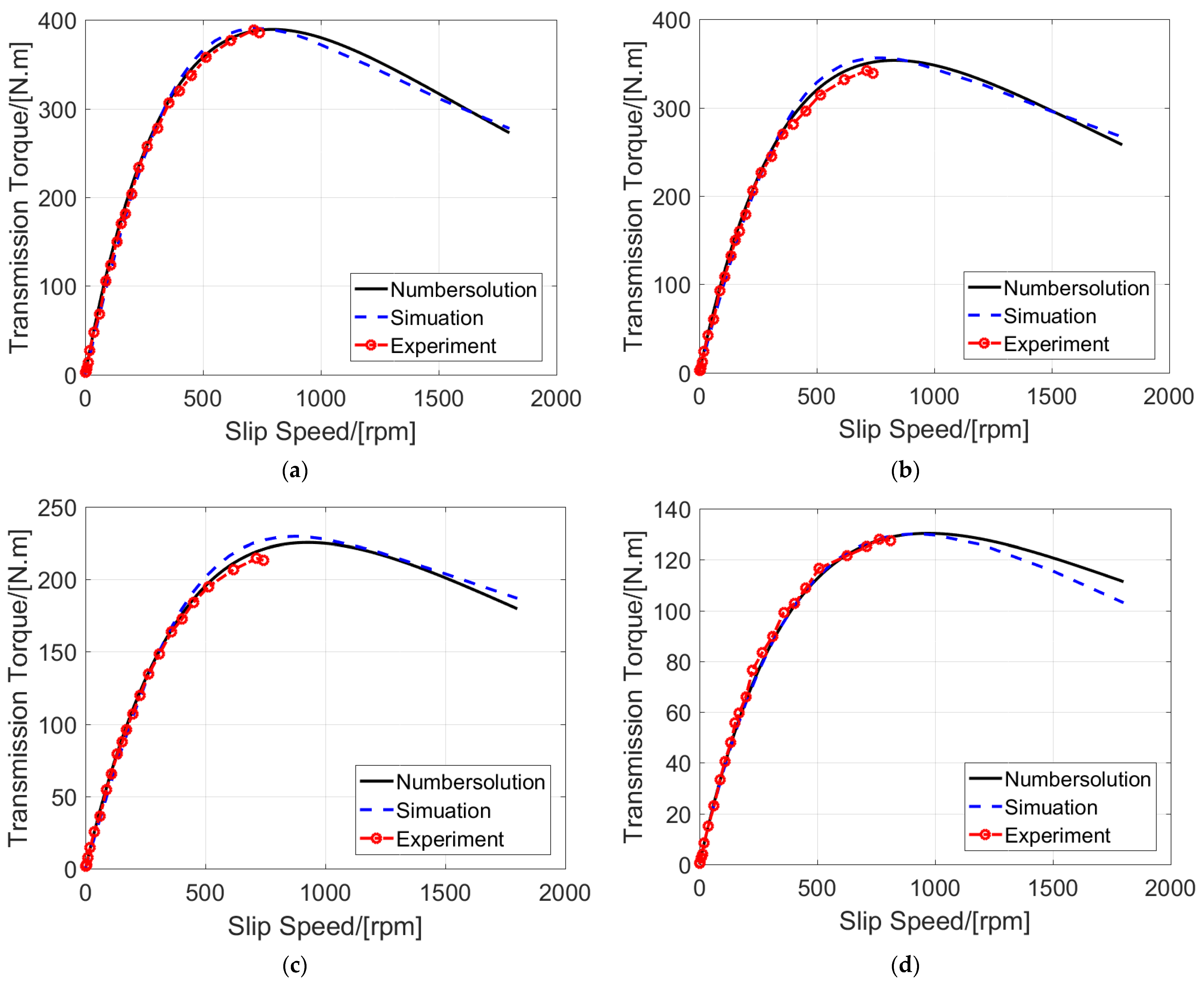
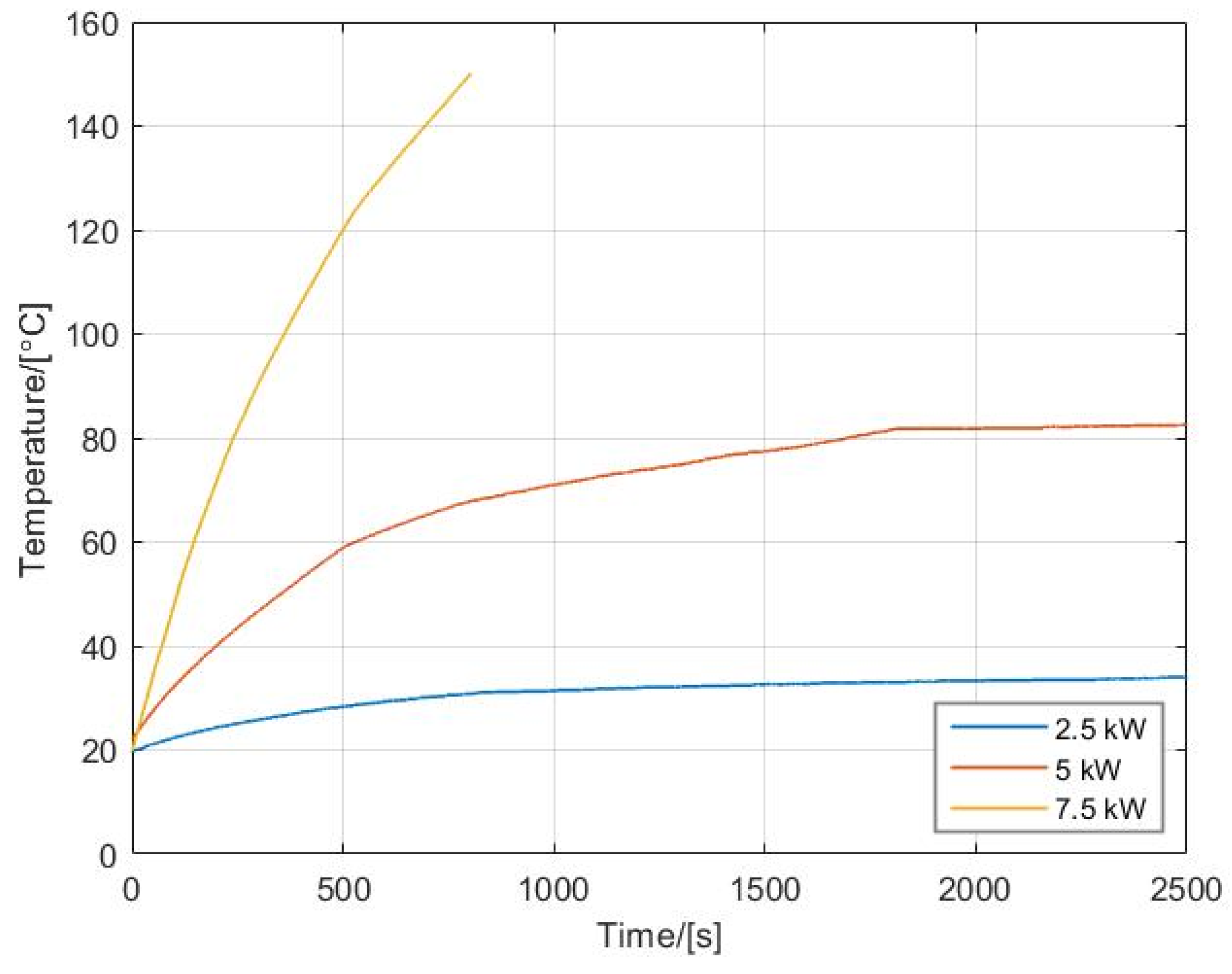
3.1. Simulation and Experimental Results
3.2. Discussion and Comparison
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Full Term |
|---|---|
| PMC | Permanent Magnet Coupling |
| CPMC | Cylinder Permanent Magnet Coupling |
| DPMC | Disk Permanent Magnet Coupling |
| FEA | Finite Element Analysis |
| FEM | Finite Element Analysis Method |
| MMF | Magnetomotive Force |
| MF | Magnetoresistance |
| 3D | Three-Dimensional |
| AS-PMECC | Adjustable-Speed Permanent Magnet Eddy Current Coupling |
| RF-CPMC | Radial Flux Cylindrical Permanent Magnet Coupling |
| FC-CPMC | Flux-Concentrating Cylindrical Permanent Magnet Coupling |
| Notation | Full Term | Unit |
|---|---|---|
| B | Magnetic flux density | T |
| Br | Remanence | T |
| Bm | Magnetic flux density of permanent magnet working point | T |
| Bi | Magnetic flux density in magnetic flux tube i | T |
| H | Magnetic field intensity | A/m |
| Hm | Magnetic field intensity of permanent magnet working point | A/m |
| Φ | Magnetic flux | Wb |
| Φm | Main magnetic flux of magnetic circuit | Wb |
| Φi | Magnetic flux in magnetic flux tube i | Wb |
| Φa | Air gap magnetic flux | Wb |
| μ0 | Vacuum permeability | H/m |
| μm | Relative permeability of permanent magnet | H/m |
| Λ | Permeance | H |
| Λi | Permeance of magnetic flux tube i | H |
| R | Magnetoresistance | H−1 |
| Rm | Internal resistance of permanent magnet | H−1 |
| Ri | Magnetoresistance of magnetic flux tube i | H−1 |
| Am | Cross-sectional area of permanent magnet | m2 |
| Ai | Cross-sectional area of flux tube i | m2 |
| F | Magnetomotive force | A |
| Fad | Induced magnetic field magnetomotive force | A |
| ds | Skin depth | m |
| Δ | Skin effect coefficient | - |
| ω | Slip speed | rpm |
| n | Rotational speed | rpm |
| T | Torque | N.m |
| P | Power | kW |
References
- Li, Y.; Hu, Y.; Song, B.; Mao, Z.; Tian, W. Performance analysis of conical permanent magnet couplings for underwater propulsion. J. Mar. Sci. Eng. 2019, 7, 187. [Google Scholar] [CrossRef] [Green Version]
- Rhyu, S.-H.; Khaliq, S.; Baek, C.W.; Ha, Y.C. Optimal design and static performance analysis of permanent magnet coupling for chemical pump application. J. Magn. 2020, 25, 64–69. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, M.; Hua, W. Investigation and general design principle of a new series of complementary and modular linear FSPM motors. IEEE Trans. Ind. Electron. 2013, 60, 5436–5446. [Google Scholar] [CrossRef]
- Zhu, Z.N.; Meng, Z. 3D analysis of eddy current loss in the permanent magnet coupling. Rev. Sci. Instrum. 2016, 87, 074701. [Google Scholar] [CrossRef]
- Kano, Y.; Kosaka, K.; Matsui, N. A simple nonlinear magnetic analysis for axial-flux permanent-magnet machines. IEEE Trans. Ind. Electron. 2010, 57, 2124–2133. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Tseng, K.; Zhang, S.; Nguyen, H.T. A novel axial flux permanent-magnet machine for flywheel energy storage system: Design and analysis. IEEE Trans. Ind. Electron. 2011, 58, 3784–3794. [Google Scholar] [CrossRef]
- Canova, A.; Freschi, F.; Gruosso, G.; Vusini, B. Genetic optimisation of radial eddy current couplings. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2005, 24, 767–783. [Google Scholar] [CrossRef]
- Bracikowski, N.; Hecquet, M.; Brochet, P.; Shirinskii, S.V. Multi-physics modeling of a permanent magnet synchronous machine by using lumped models. IEEE Trans. Ind. Electron. 2012, 59, 2426–2437. [Google Scholar] [CrossRef]
- Hsieh, M.; Hsu, Y. A generalized magnetic circuit modeling approach for design of surface-permanent magnet machines. IEEE Trans. Ind. Electron. 2012, 59, 779–792. [Google Scholar] [CrossRef]
- Mohammadi, S.; Mirsalim, M.; Sadegh, V.Z. Nonlinear modeling of eddy-current couplers. IEEE Trans. Energy Convers. 2014, 29, 224–231. [Google Scholar] [CrossRef]
- Cai, C.S.; Wang, J.H. Electromagnetic properties of cylinder permanent magnet eddy current coupling. Int. J. Appl. Electromagn. 2017, 54, 655–671. [Google Scholar] [CrossRef]
- Li, Y.; Cai, S.; Yao, J.; Cheng, J. Influence analysis of structural parameters on transfer characteristics of high-power permanent magnet eddy-current coupling. China Mech. Eng. 2017, 28, 1588–1592. [Google Scholar]
- Zheng, D.; Guo, X.F. Analytical prediction and analysis of electromagnetic-thermal fields in PM eddy current couplings with injected harmonics into magnet shape for torque improvement. IEEE Access 2020, 8, 60052–60061. [Google Scholar] [CrossRef]
- Meng, G.Y.; Niu, Y.H. The torque research for permanent magnet coupling based on ansoft Maxwell transient analysis. Appl. Mech. Mater. 2013, 423, 2014–2019. [Google Scholar] [CrossRef]
- Yuan, W.Q.; Liu, Y.; Li, D.; Meng, G.Y. Research on Overloading Protection of Permanent Magnetic Coupler in Coal Mine. Appl. Mech. Mater. 2014, 597, 492–497. [Google Scholar] [CrossRef]
- Cao, Y.; Li, X.; Liu, W. The Analysis of Thermal Magnetic Coupling of Tubular Permanent Magnetic Coupler. J. Phys. Conf. Ser. 2020, 1550, 042044. [Google Scholar] [CrossRef]
- Roters, H.C. Electromagnetic Devices; John Wiley & Sons: Hoboken, NJ, USA, 1941. [Google Scholar]
- Pfister, P.D.; Perriard, Y. Slotless permanent-magnet machines: General analytical magnetic field calculation. IEEE Trans. Magn. 2011, 47, 1739–1752. [Google Scholar] [CrossRef]
- Matsumoto, T.R.; Chabu, I. Resistive torque in permanent magnet couplings operating through a conductive wall. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2017, 36, 1120–1133. [Google Scholar] [CrossRef]
- Mohammadi, S.; Mirsalim, M.; Sadegh, V.Z.; Talebi, H.A. Analytical modeling and analysis of axial-flux interior permanent-magnet couplers. IEEE Trans. Ind. Electron. 2014, 61, 5940–5947. [Google Scholar] [CrossRef]
- Dai, X.; Liang, Q.; Cao, J.; Long, Y.; Mo, J.; Wang, S. Analytical modeling of axial-flux permanent magnet eddy current couplings with a slotted con-ductor topology. IEEE Trans. Magn. 2016, 52, 1–15. [Google Scholar]
- Li, Y.; Lin, H.; Tao, Q.; Lu, X.; Yang, H.; Fang, S.; Wang, H. Analytical analysis of an adjustable-speed permanent magnet eddy-current coupling with a non-rotary mechanical flux adjuster. IEEE Trans. Magn. 2019, 55, 8000805. [Google Scholar] [CrossRef]
- Liu, D.; Tang, Y. Calculation of permanent magnetic working points of polarity magnetic systems based on superposition. Mar. Electr. Electron. Eng. 2010, 30, 45–49. [Google Scholar]
- Gao, Y.; Huang, J.; Zhang, S. Optimal calculating on working point of the permanent magnet. AER-Adv. Eng. Res. 2015, 27, 1026–1040. [Google Scholar]
- Belevitch, V. Lateral skin effect in a flat conductor. Philips. Tech. Rev. 1971, 6–8, 221–231. [Google Scholar]
- Jablonski, P.; Szczegielniak, T.; Kusiak, D.; Piatek, Z. Analytical-numerical solution for the skin and proximity effects in two parallel round conductors. Energies 2019, 12, 3584. [Google Scholar] [CrossRef] [Green Version]
- Kahl, G.D.; Weber, F.N. Circuit analogy for skin effects in conductors. Am. J. Phys. 1971, 39, 321. [Google Scholar] [CrossRef]
- Yamazaki, K.; Abe, A. Loss Analysis of interior permanent magnet motors considering carrier harmonics and magnet eddy currents using 3-D fem. In Proceedings of the IEEE International Electric Machines & Drives Conference 2007, Antalya, Turkey, 3–5 May 2007; pp. 904–909. [Google Scholar]
- Zhang, H.; Zou, J.; Zhu, H. The numerical calculation of eddy-current field and temperature field for insulation shell of permanent magnet shaft coupling. In Proceedings of the International Conference on Electrical Machines and Systems 2007, Seoul, Korea, 8–11 October 2007; pp. 1397–1401. [Google Scholar]
- Tiang, T.L.; Ishak, D.; Lim, C.P.; Jamil, M.K.M. A comprehensive analytical subdomain model and its field solutions for surface-mounted permanent magnet machines. IEEE Trans. Magn. 2015, 51, 8104314. [Google Scholar] [CrossRef]
- Knight, A.M.; Zhan, Y. Identification of flux density harmonics and resulting iron losses in induction machines with nonsinusoidal supplies. IEEE Trans. Magn. 2008, 44, 1562–1565. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Wang, L. An improved analytical model of permanent magnet eddy current magnetic coupler based on electromagnetic-thermal coupling. IEEE Access 2020, 8, 95235–95250. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Wang, L. Nonlinear modeling of transmission performance for permanent magnet eddy current coupler. Math. Probl. Eng. 2019, 2019, 2098725. [Google Scholar] [CrossRef]
- Mohammadi, S.; Mirsalim, M. Double-sided permanent-magnet radial-flux eddy-current couplers: Three-dimensional analytical modelling, static and transient study, and sensitivity analysis. IET Electr. Power Appl. 2013, 7, 665–679. [Google Scholar] [CrossRef]
- Cristache, C.; Diez-Jimenez, E.; Valiente-Blanco, I.; Sanchez-Garcia-Casarrubios, J.; Perez-Diaz, J.L. Aeronautical magnetic torque limiter for passive protection against overloads. Machines 2016, 4, 17. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Paul, S.; Chang, J.; Hwang, T.; Yoon, J. Design and comparative survey of high torque coaxial permanent magnet coupling for tidal current generator. Int. J. Electr. Power Energy Syst. 2020, 120, 105966. [Google Scholar] [CrossRef]
| Grade | Remanence | Coercive Force | Maximum Energy Product | Density | Curie Temperature | Maximum Work Temperature | Relative Permeability |
|---|---|---|---|---|---|---|---|
| N35SH | 1.2 T | ≥1592 kA/m | 275 kJ/m3 | 7.55 g/cm3 | 320 °C | 150 °C | 1.05 |
| Parameters | Symbol | Value |
|---|---|---|
| Permanent magnet width (circumferential direction) | 30 mm | |
| Axial length of permanent magnet | 100 mm | |
| Permanent magnet thickness (radial direction) | 15 mm | |
| Permanent magnet logarithm | N | 10 |
| Distance between outer permanent magnet and center of circle | 78 mm | |
| Distance between inner permanent magnet and center of circle | 53 mm | |
| Outer diameter of steel drum | 104 mm | |
| Inner diameter of steel drum | 48 mm | |
| Axial length of conductor tube | 120 mm | |
| Average radius of conductor tube | 72 mm | |
| Conductor tube thickness | 6 mm | |
| Air gap thickness (radial distance between inner and outer permanent magnets) | 10 mm |
| Type | Rate Power | Rate Current | Rate Voltage | Rate Rotational Speed |
|---|---|---|---|---|
| YE2 225M-6 | 30 kW | 59.3 A | 380 V | 980 rpm |
| Devices/Status | CPMC/40 rpm | AS-PMECC/40 rpm | Magnetic Torque Limiter/20 °C | RF-CPMC | FC-CPMC |
|---|---|---|---|---|---|
| Torque Density | 9 Nm/kg | 6 Nm/kg | 20 Nm/kg | 80 Nm/kg | 60 Nm/kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Shi, J.; Cui, W.; Meng, G. Theoretical Computational Model for Cylindrical Permanent Magnet Coupling. Electronics 2021, 10, 2026. https://doi.org/10.3390/electronics10162026
Sun K, Shi J, Cui W, Meng G. Theoretical Computational Model for Cylindrical Permanent Magnet Coupling. Electronics. 2021; 10(16):2026. https://doi.org/10.3390/electronics10162026
Chicago/Turabian StyleSun, Ke, Jianwen Shi, Wei Cui, and Guoying Meng. 2021. "Theoretical Computational Model for Cylindrical Permanent Magnet Coupling" Electronics 10, no. 16: 2026. https://doi.org/10.3390/electronics10162026
APA StyleSun, K., Shi, J., Cui, W., & Meng, G. (2021). Theoretical Computational Model for Cylindrical Permanent Magnet Coupling. Electronics, 10(16), 2026. https://doi.org/10.3390/electronics10162026