
A New Density-Based Clustering Method Considering Spatial Distribution of Lidar Point Cloud for Object Detection of Autonomous Driving



Abstract
:1. Introduction
- (a)
- Hierarchical approach
- (b)
- Space partition
2. Problem Analysis
- (a)
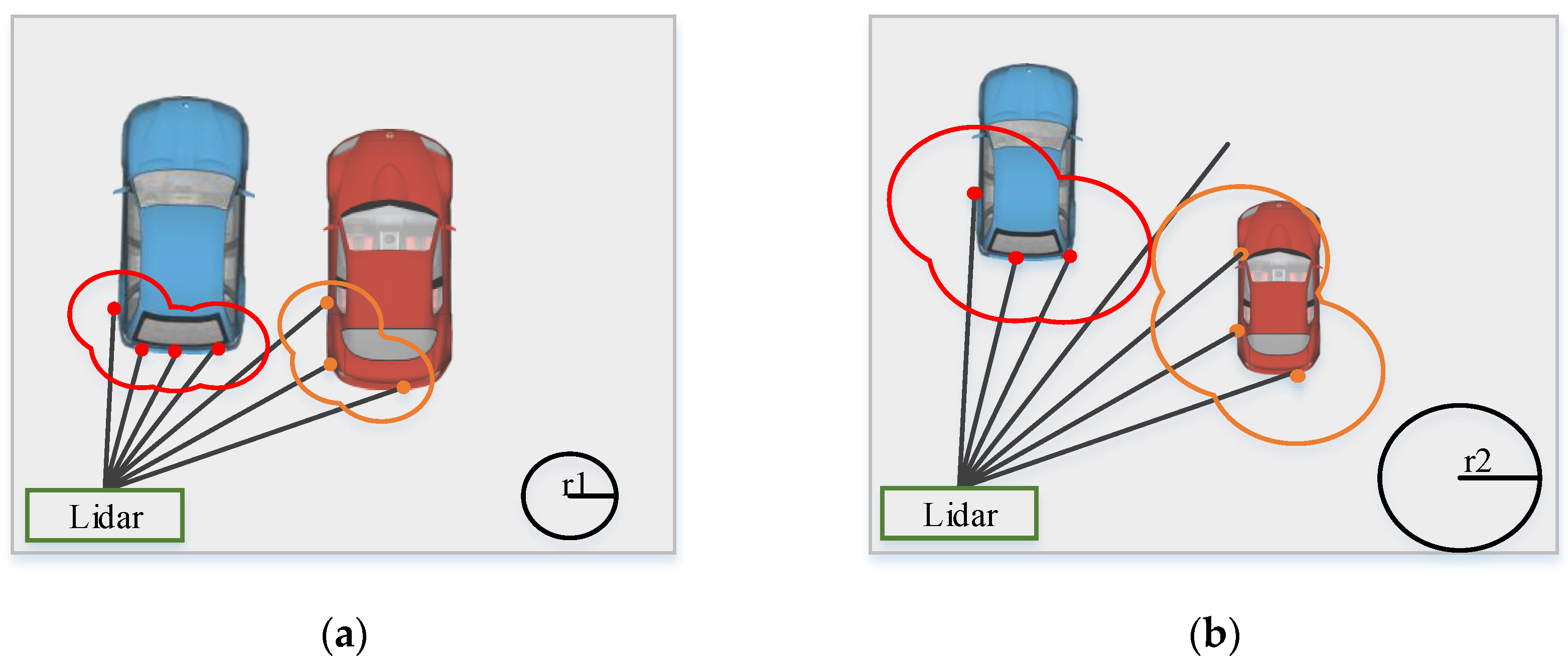
- The traditional DSC with fixed parameter values cannot make a good balance between the clustering performances of far and near objects and wrong segmentations easily happen. A different clustering radius is necessary for objects in different regions.
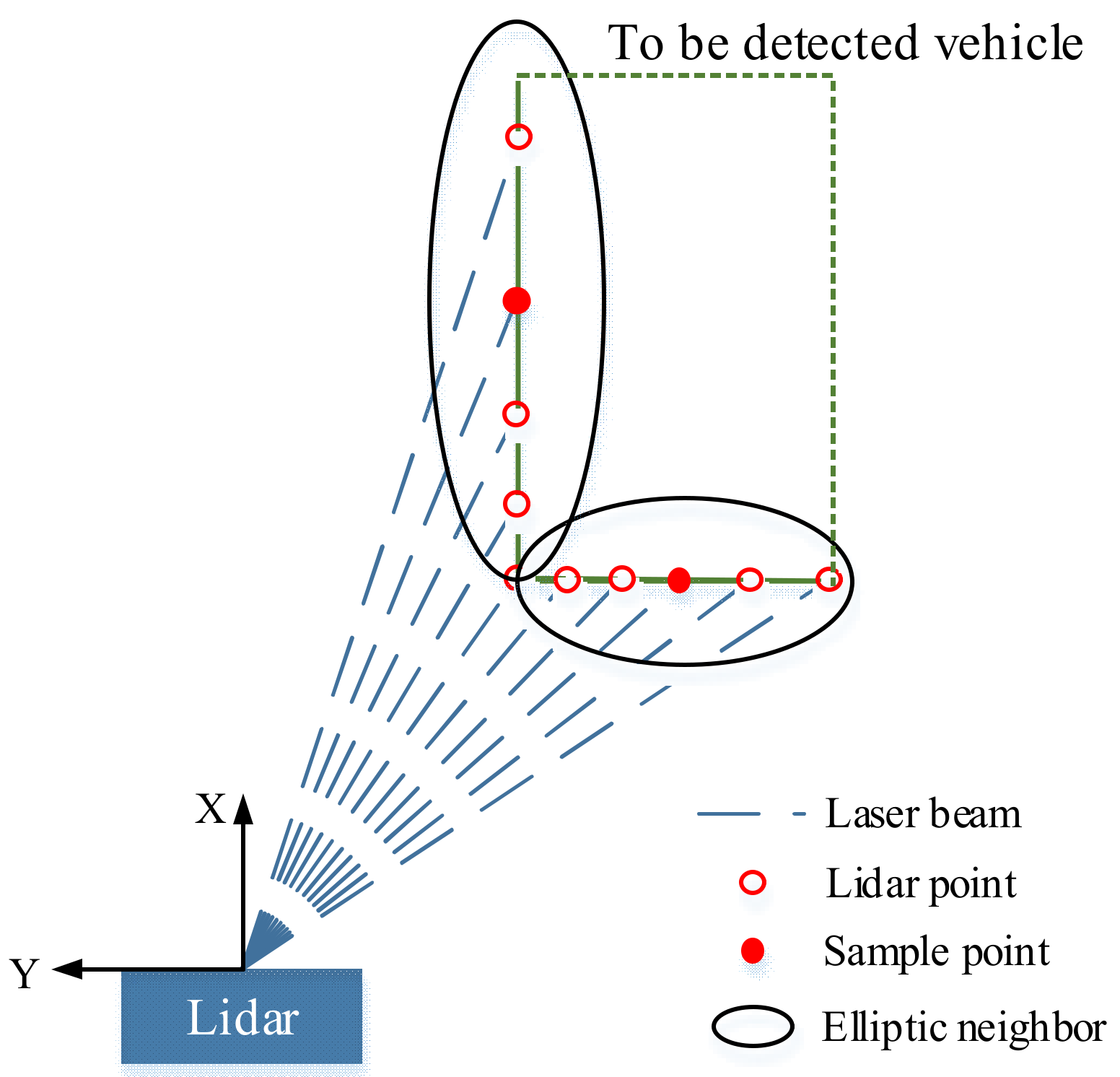
- (b)
- For the same object, the point distribution of its contour along the longitudinal and lateral directions is not the same. This causes the circular neighborhood to cover much of the blank area, which easily leads to under-segmentation.
3. DAC Method
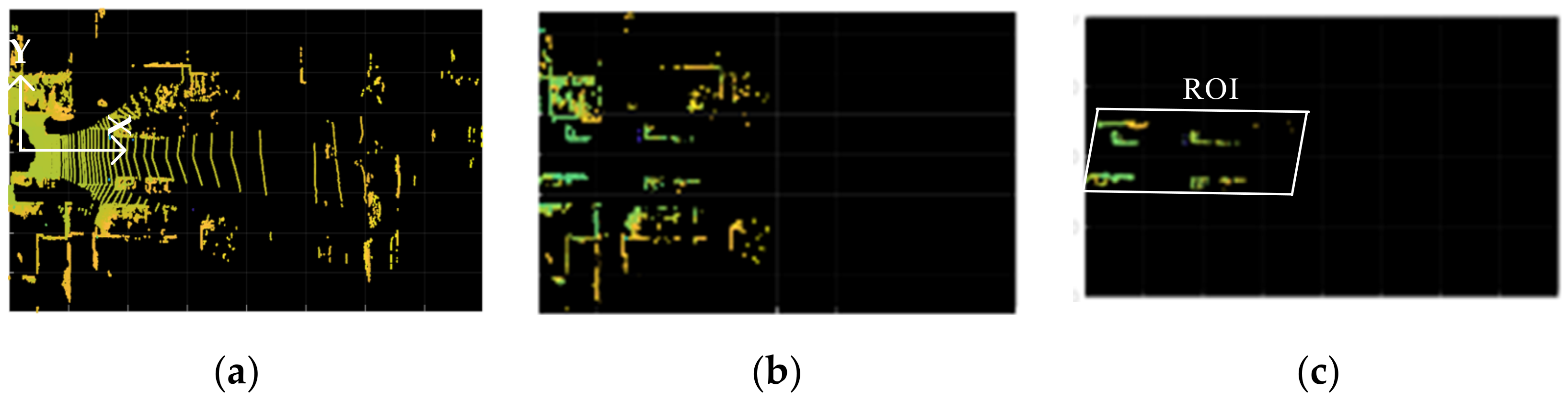
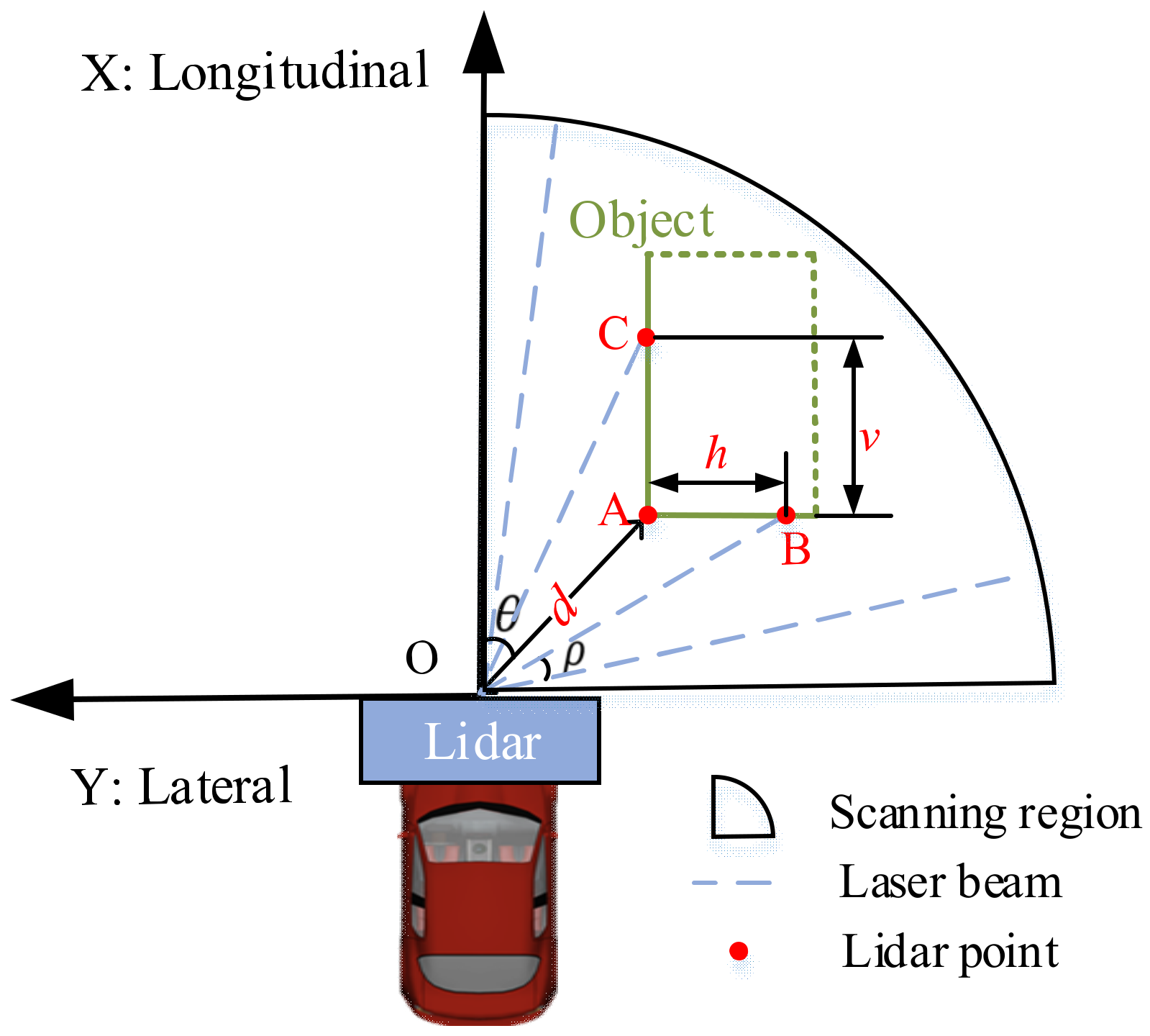
3.1. Spatial Distribution Analysis of Point Cloud
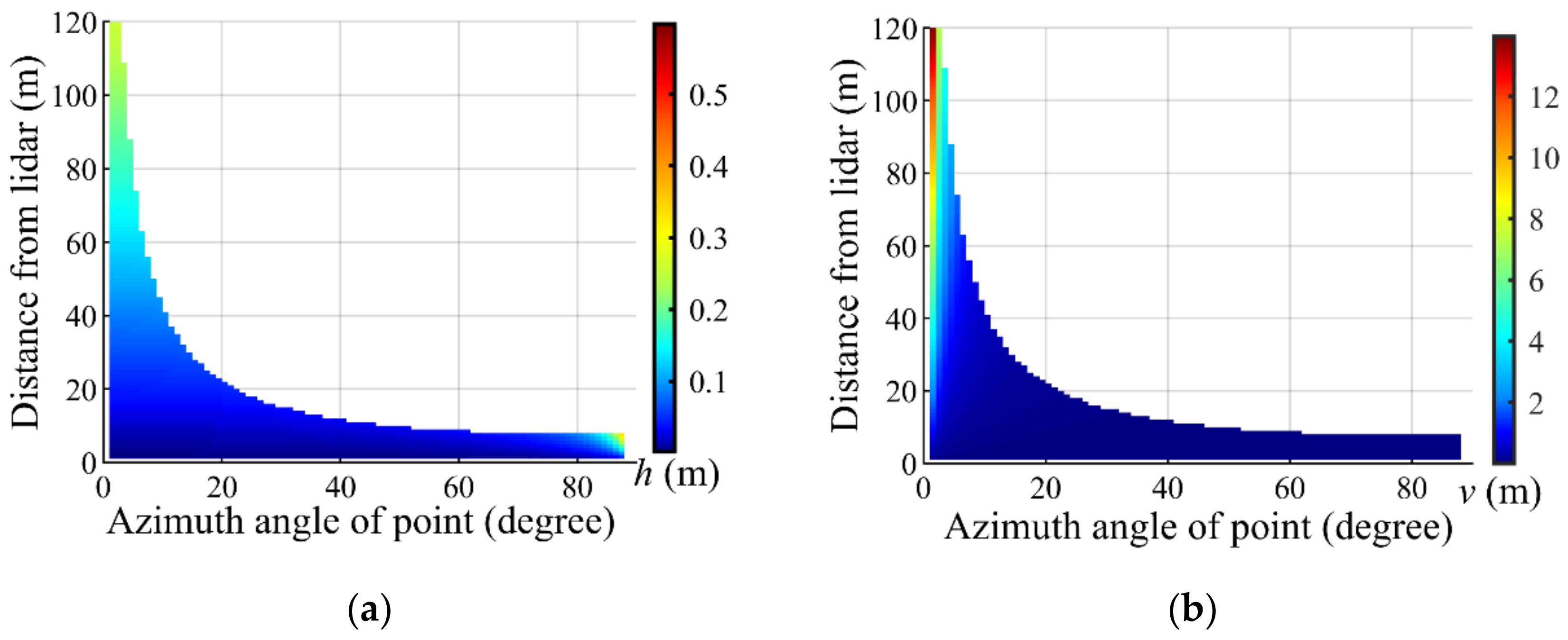
- (a)
- In this detected region, most of h is less than 0.273 m, while there are abrupt changes at the poles of , = 0.262 m when and = 0.597 m for , but their orders of magnitude are still the same. That is, h has a very stable variation; thus, the length of the axis associated with it can be considered as a constant.
- (b)
- On the contrary, the variation of v is more pronounced than that of h, and the correlation between v and d is stronger. The maximum amplitude of v can reach 13.953 m, of which 95% is less than 5.81 m, but it is still too large to be ignored compared with the size of the detected object. To ensure that an appropriate neighborhood area is obtained for each sampling point, the axis related to the longitudinal point spacing must be variable.
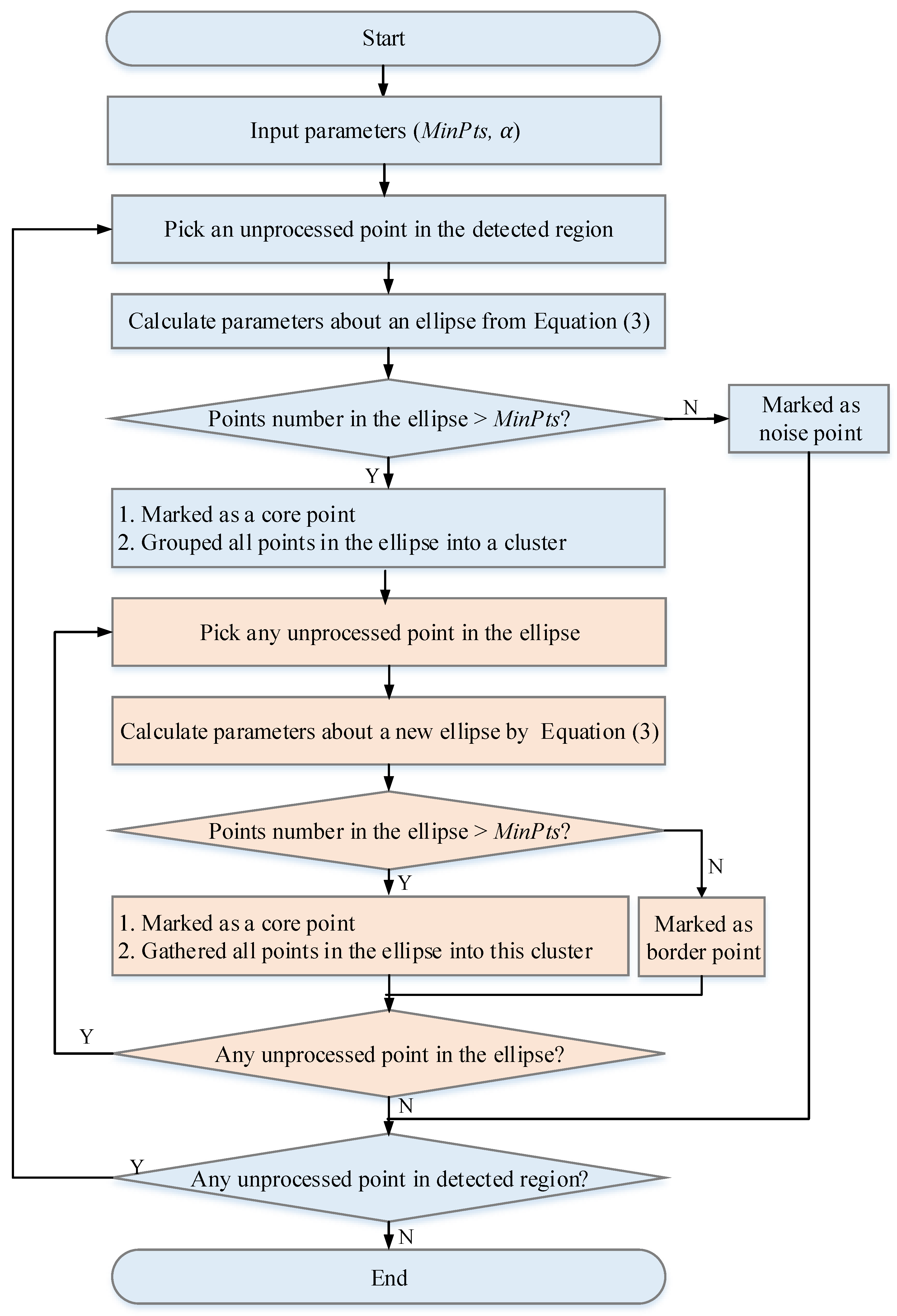
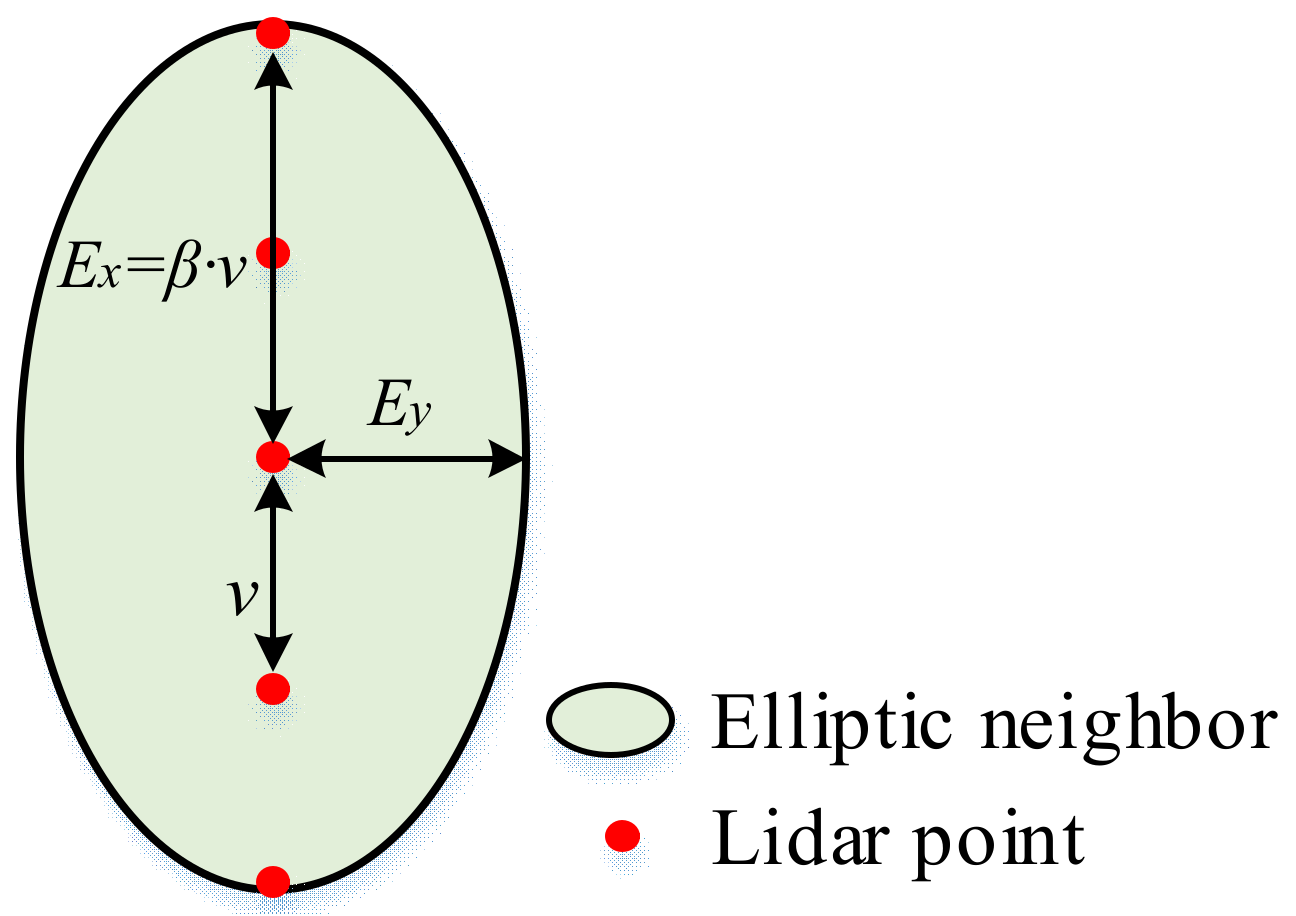
3.2. DAC Design
- (a)
- The existence of a minimum point spacing, because these points were projected onto the mesh of the grid map; thus, Ey is a constant related to w.
- (b)
- Similarly, v is saturated by w for the points very close to the lidar, resulting in the existence of a minimum Ex.
- (c)
- In the applications, the size of the object to be detected is usually limited, and under-segmentation still easily occurs if a very large neighborhood is applied even at a far distance; hence, an upper bound of Ex is given in (4).
4. Parameter Design
4.1. Relationship between MinPts and β
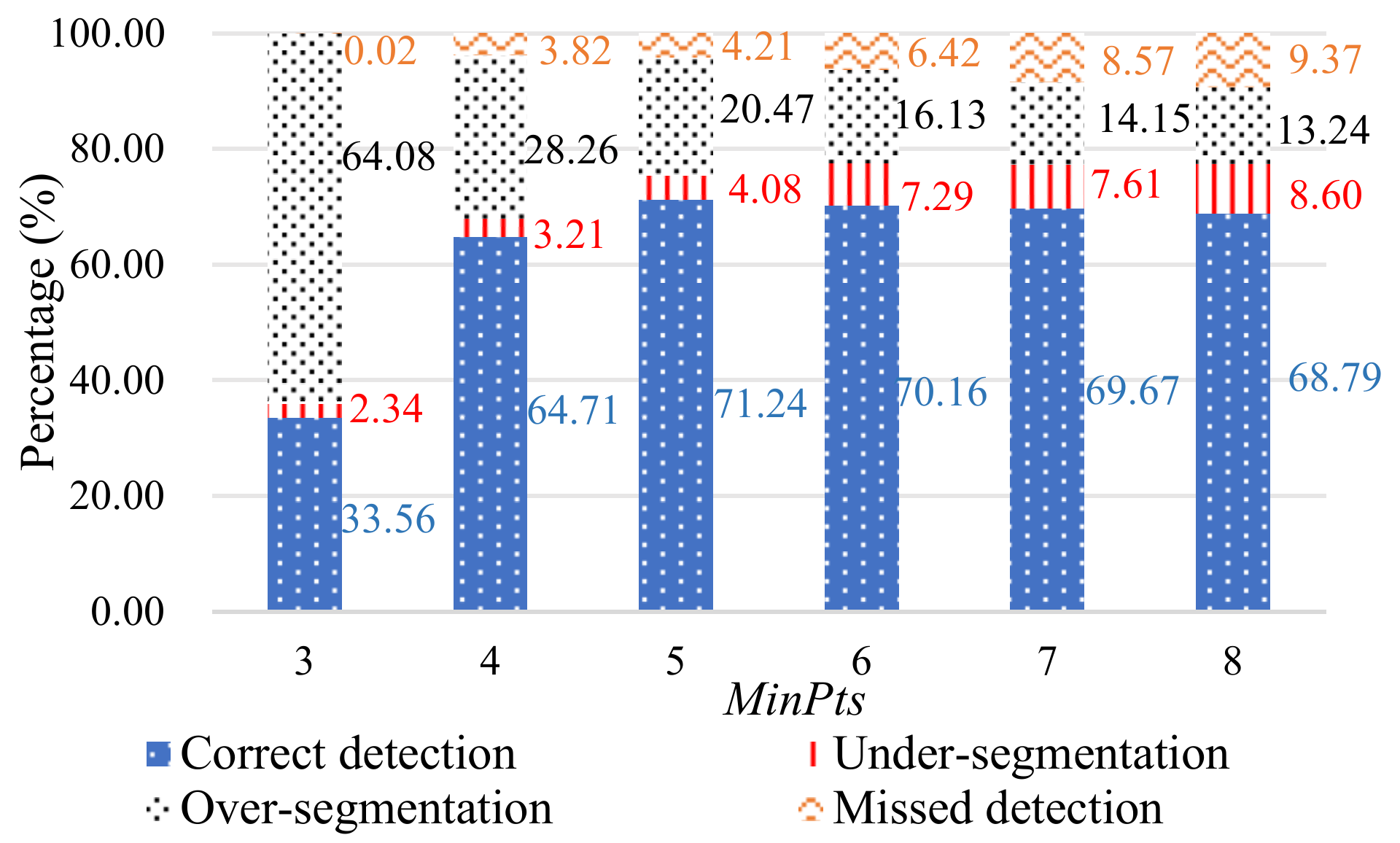
4.2. Analysis of MinPts
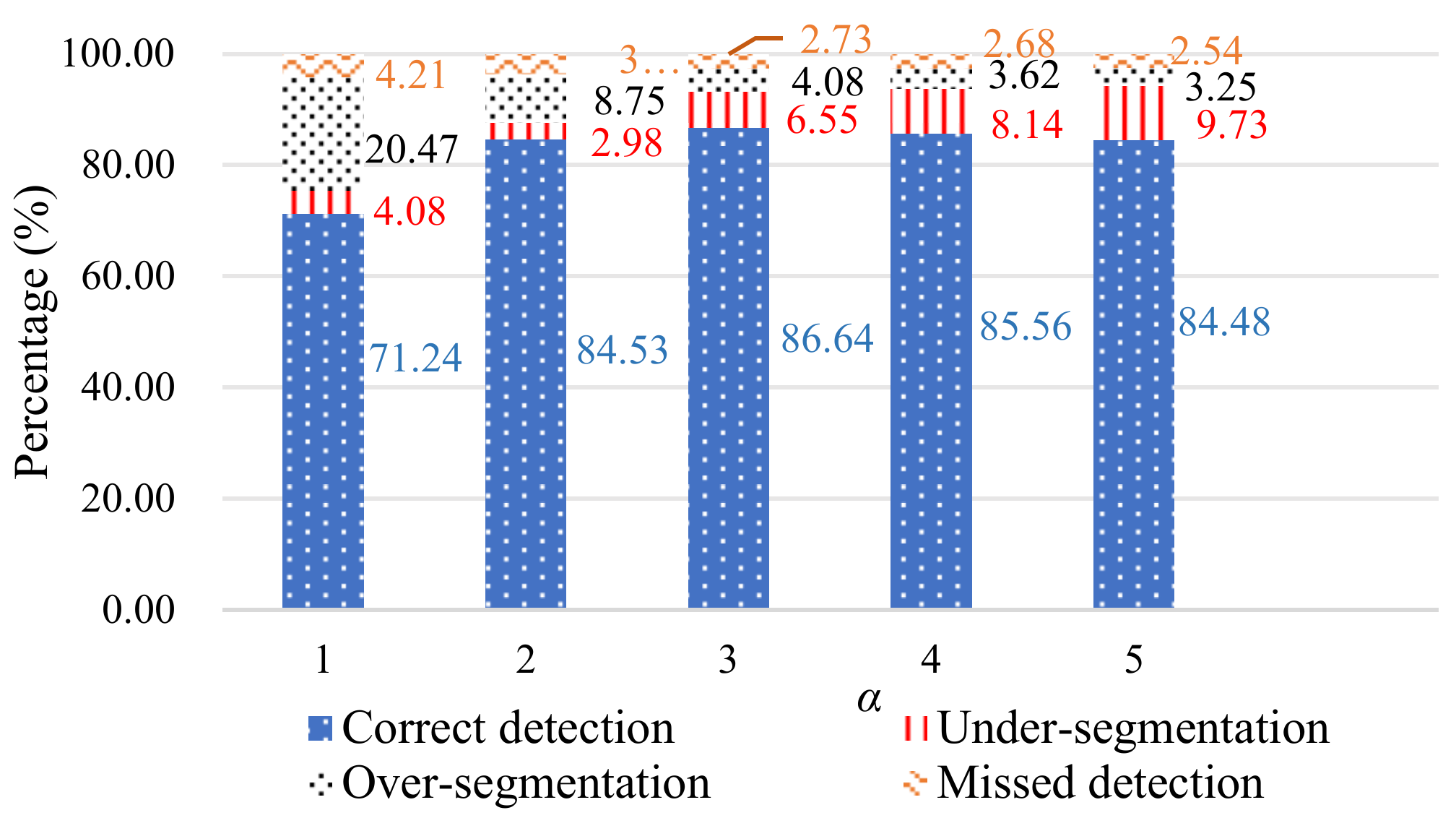
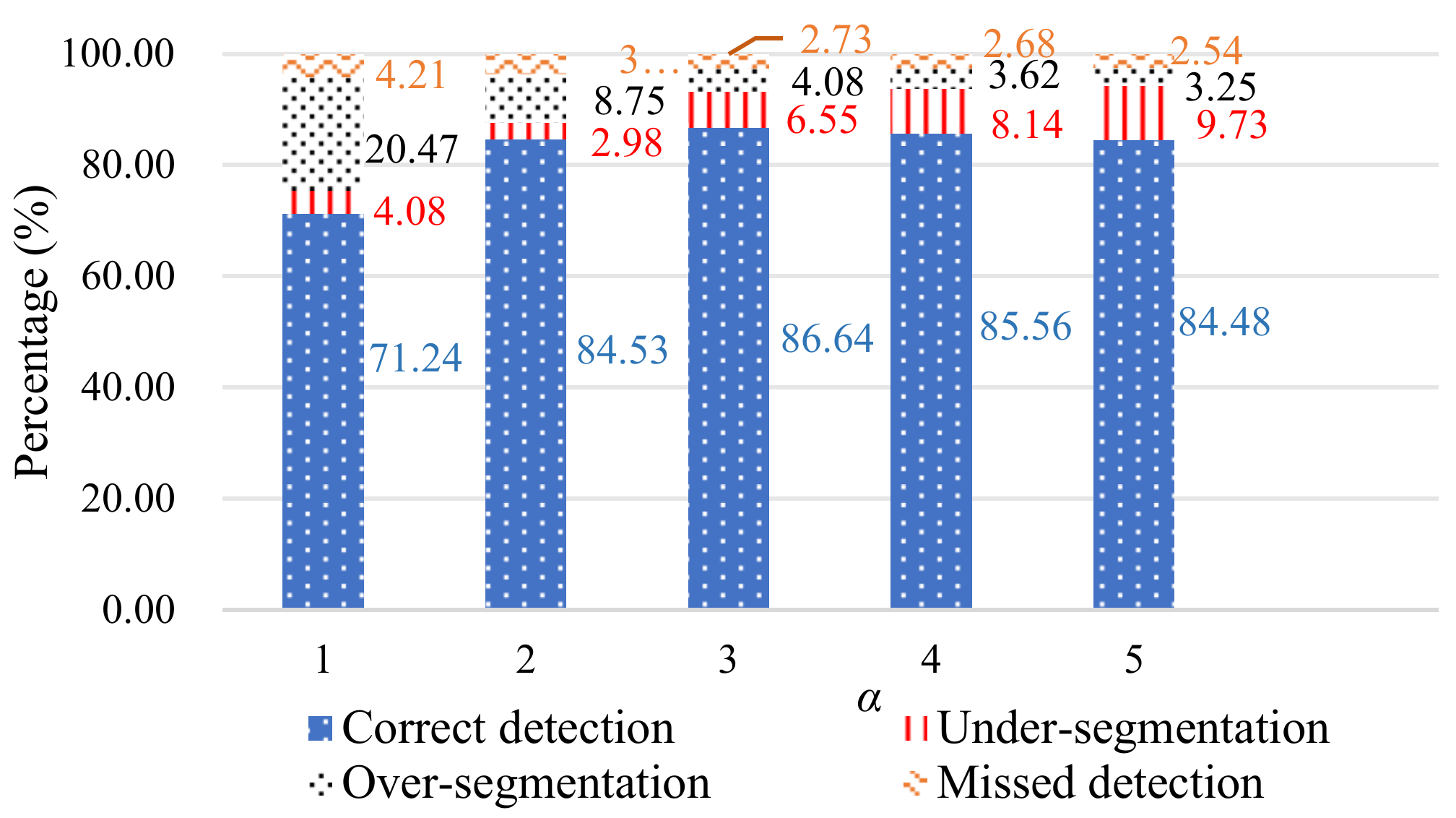
4.3. Analysis of α
5. Experimental Results and Analysis
- (1)
- With the on-board unit as the processor, the running time of the methods cannot be too long;
- (2)
- The adaptive ellipse in DAC replaces the fixed circle as the searching neighborhood; thus, the clustering results need to be compared when these two searching neighborhoods are applied.
- (a)
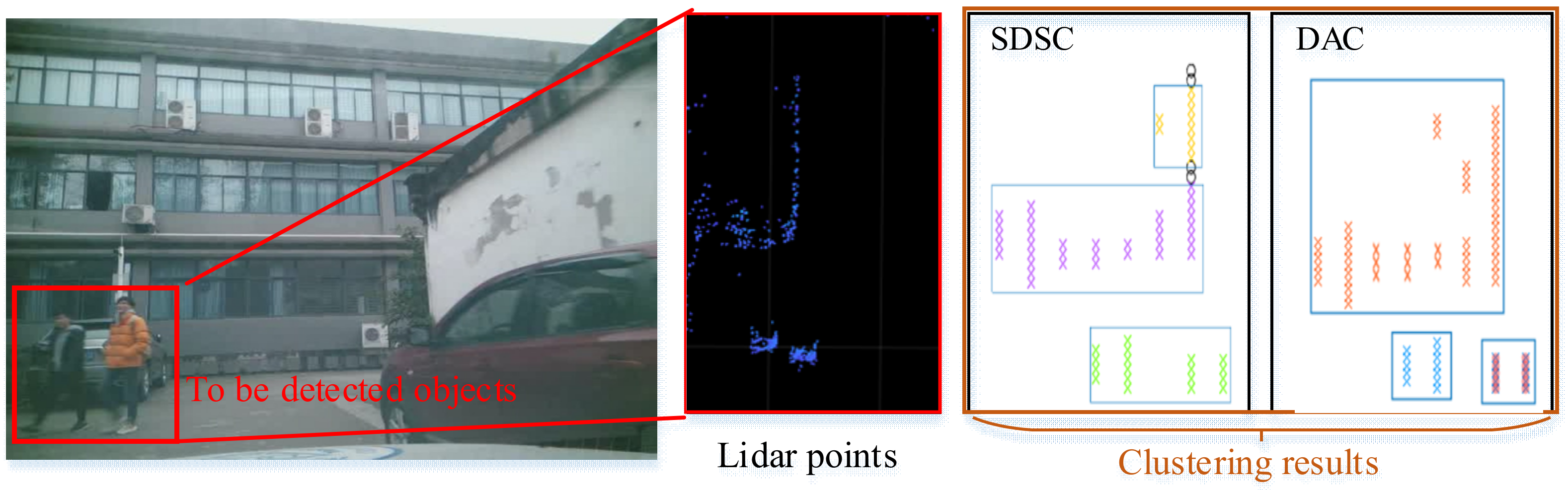
- Compared with SDSC, the improvement rates of over-segmentation and under-segmentation in the DAC method are more than half, which provides a good foundation for correctly estimating the size and location of objects [8].
- (b)
- The highest frequency of the IBEO fusion device is 25 Hz, and the DAC does not have a computational delay.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Corrected Detection | Over-Segmentation | Under-Segmentation | Missed Detection | Time (ms) |
|---|---|---|---|---|---|
| SDSC | 74.46% | 9.43% | 12.89% | 3.22% | 21 |
| DAC | 86.54% | 4.66% | 5.82% | 2.98% | 38 |
6. Conclusions
- (a)
- The point cloud density is significantly different in different ranges and directions, which is fully considered when designing the neighborhood shape.
- (b)
- The designed elliptic neighborhood with adaptive adjustment can improve the clustering performance in all detection regions, while traditional DSC cannot balance the clustering results well between far and near ranges due to the non-uniformity of the point cloud.
- (c)
- In relatively complex environments, DAC has more advantages than SDSC in improving the performance of over-segmentation and under-segmentation.
Author Contributions
Funding
Conflicts of Interest
References
- Feng, G.; Dang, D.; He, Y. Robust Coordinated Control of Nonlinear Heterogeneous Platoon Interacted by Uncertain Topology. IEEE Trans. Intell. Transp. Syst. 2020, in press. [Google Scholar] [CrossRef]
- Tang, F.; Gao, F.; Wang, Z. Driving Capability-Based Transition Strategy for Cooperative Driving: From Manual to Automatic. IEEE Access 2020, 8, 139013–139022. [Google Scholar] [CrossRef]
- Du, B.; Zhang, C.; Shen, J.; Zheng, Z. A dynamic sensitivity model for unidirectional pedestrian flow with overtaking behavior and its application on social distancing’s impact during COVID-19. IEEE Trans. Intell. Transp. Syst. 2021, in press. [Google Scholar]
- Zhang, Y.; Xu, H.; Wu, J. An automatic background filtering method for detection of road users in heavy traffics using road-side 3-D LiDAR sensors with noises. IEEE Sens. J. 2020, 20, 6596–6604. [Google Scholar] [CrossRef]
- Pang, L.; Cao, Z.; Yu, J.; Liang, S.; Chen, X.; Zhang, W. An efficient 3D pedestrian detector with calibrated RGB camera and 3D LiDAR. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2902–2907. [Google Scholar]
- Belyaev, E.; Molchanov, P.; Vinel, A.; Koucheryavy, Y. The Use of Automotive Radars in Video-Based Overtaking Assistance Applications. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1035–1042. [Google Scholar] [CrossRef]
- Wen, W.W.; Zhang, G.; Hsu, L.-T. GNSS NLOS Exclusion Based on Dynamic Object Detection Using LiDAR Point Cloud. IEEE Trans. Intell. Transp. Syst. 2019, 22, 853–862. [Google Scholar] [CrossRef]
- Farag, W. Real-Time Autonomous Vehicle Localization Based on Particle and Unscented Kalman Filters. J. Control. Autom. Electr. Syst. 2021, 32, 309–325. [Google Scholar] [CrossRef]
- Hasecke, F.; Hahn, L.; Kummert, A. FLIC: Fast lidar image clustering. arXiv 2003, arXiv:2003.00575. [Google Scholar]
- Chen, B.; Chen, H.; Yuan, D.; Yu, L. 3D Fast Object Detection Based on Discriminant Images and Dynamic Distance Threshold Clustering. Sensors 2020, 20, 7221. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, P.; Xu, Z.; Min, H.; Yu, H. Fusion of 3D LIDAR and Camera Data for Object Detection in Autonomous Vehicle Applications. IEEE Sens. J. 2020, 20, 4901–4913. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.H.; Chao, W.-L.; Wang, Y.; Hariharan, B.; Weinberger, K.Q.; Campbell, M. LDLS: 3-D Object Segmentation through Label Diffusion from 2-D Images. IEEE Robot. Autom. Lett. 2019, 4, 2902–2909. [Google Scholar] [CrossRef] [Green Version]
- Cai, N.; Anwer, N.; Scott, P.J.; Qiao, L.; Jiang, X. A new partitioning process for geometrical product specifications and verification. Precis. Eng. 2020, 62, 282–295. [Google Scholar] [CrossRef]
- Zhang, M.; Zou, F.; Liao, L.; Gan, Z.; Fang, W.; Gao, S.; Chen, Z.; Zhang, R. A method for construction core points identification based on trajectory data of engineering vehicles. In Proceedings of the 2018 International Conference on Cloud Computing, Big Data and Blockchain (ICCBB), Fuzhou, China, 15–17 November 2018; pp. 1–5. [Google Scholar]
- Mohammadnazar, A.; Arvin, R.; Khattak, A.J. Classifying travelers’ driving style using basic safety messages generated by connected vehicles: Application of unsupervised machine learning. Transp. Res. Part C Emerg. Technol. 2020, 122, 102917. [Google Scholar] [CrossRef]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C.J. From LiDAR point cloud towards digital twin city: Clustering city objects based on Gestalt principles. ISPRS J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Xu, S.; Wang, R.; Wang, H.; Zheng, H. An Optimal Hierarchical Clustering Approach to Mobile LiDAR Point Clouds. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2765–2776. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Xu, H.; Zheng, J.; Zhao, J. Automatic Vehicle Detection with Roadside LiDAR Data under Rainy and Snowy Conditions. IEEE Intell. Transp. Syst. Mag. 2020, 13, 197–209. [Google Scholar] [CrossRef]
- Jing, W.; Zhao, C.; Jiang, C. An improvement method of DBSCAN algorithm on cloud computing. Procedia Comput. Sci. 2019, 147, 596–604. [Google Scholar] [CrossRef]
- Jung, Y.; Seo, S.-W.; Kim, S.-W. Curb Detection and Tracking in Low-Resolution 3D Point Clouds Based on Optimization Framework. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3893–3908. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, G.; Cheng, Z.; Kong, G. A target detection algorithm for 3D Lidar point cloud. In Proceedings of the 2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 28–30 September 2019; pp. 405–410. [Google Scholar]
- Shah, G.H. An improved DBSCAN, a density based clustering algorithm with parameter selection for high dimensional data sets. In Proceedings of the 2012 Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, India, 6–8 December 2012; pp. 1–6. [Google Scholar]
- Duan, J.; Shi, L.; Zheng, K.; Liu, D. Road and obstacle detection research based on four-line Ladar. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1728–1733. [Google Scholar]
- Zhang, C.; Wang, S.; Yu, B.; Li, B.; Zhu, H. A two-stage adaptive clustering approach for 3D point clouds. In Proceedings of the 2019 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Nagoya, Japan, 13–15 July 2019; pp. 11–16. [Google Scholar]
- Xu, Z.; Rao, J.; Hu, W.; Chen, J.; Wang, T.; Liu, M.; Lei, J. On-road multiple obstacles detection using color images and LiDAR point clouds. In Proceedings of the Seventh International Conference on Optical and Photonic Engineering (icOPEN 2019), Phuket, Thailand, 16–20 October 2019; p. 12. [Google Scholar]
- Chiang, Y.-H.; Hsu, C.-M.; Tsai, A. Fast multi-resolution spatial clustering for 3D point cloud data. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1678–1683. [Google Scholar]
- Zhang, M.; Fu, R.; Guo, Y.; Wang, L.; Wang, P.; Deng, H. Cyclist detection and tracking based on multi-layer laser scanner. Hum. Cent. Comput. Inf. Sci. 2020, 10, 1–18. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and tracking of pedestrians and vehicles using roadside LiDAR sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- He, S.; Shin, H.-S.; Tsourdos, A. Multi-Sensor Multi-Target Tracking Using Domain Knowledge and Clustering. IEEE Sens. J. 2018, 18, 8074–8084. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.-H.; Peng, C.-C. A Robust 2D-SLAM Technology with Environmental Variation Adaptability. IEEE Sens. J. 2019, 19, 11475–11491. [Google Scholar] [CrossRef]
- Mustafa, H.; Leal, E.; Gruenwald, L. An experimental comparison of GPU techniques for DBSCAN clustering. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3701–3710. [Google Scholar]
- Wu, J.; Tian, Y.; Xu, H.; Yue, R.; Wang, A.; Song, X. Automatic ground points filtering of roadside LiDAR data using a channel-based filtering algorithm. Opt. Laser Technol. 2019, 115, 374–383. [Google Scholar] [CrossRef]
- Liu, H.; Pang, L.; Li, F.; Guo, Z. Hough Transform and Clustering for a 3-D Building Reconstruction with Tomographic SAR Point Clouds. Sensors 2019, 19, 5378. [Google Scholar] [CrossRef] [Green Version]
- Geng, K.; Dong, G.; Yin, G.; Hu, J. Deep Dual-Modal Traffic Objects Instance Segmentation Method Using Camera and LIDAR Data for Autonomous Driving. Remote Sens. 2020, 12, 3274. [Google Scholar] [CrossRef]
- Yang, F.; Zhu, Z.; Gong, X.; Liu, J. Real-time dynamic obstacle detection and tracking using 3D Lidar. J. Zhejiang Univ. Eng. Sci. 2012, 46, 1565–1571. [Google Scholar]
- Zhao, J.; Kigen, K.K.; Wang, M. Modelling the operation of vehicles at signalised intersections with special width approach lane based on field data. IET Intell. Transp. Syst. 2020, 14, 1565–1572. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, J.; Xu, H.; Wang, X. Vehicle Detection and Tracking in Complex Traffic Circumstances with Roadside LiDAR. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 62–71. [Google Scholar] [CrossRef]
- Pavelka, M.; Jirovsky, V. Lidar based object detection near vehicle. In Proceedings of the 2017 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25–26 May 2017; pp. 1–6. [Google Scholar]
- Song, W.; Xiong, G.; Chen, H. Intention-Aware Autonomous Driving Decision-Making in an Uncontrolled Intersection. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Duan, J.; Han, Z.; He, Y. Automatic Virtual Test Technology for Intelligent Driving Systems Considering Both Coverage and Efficiency. IEEE Trans. Veh. Technol. 2020, 69, 14365–14376. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, Q.; Han, Z.; Yang, Y. Evolution test by improved GA with application to performance limit evaluation of APPS. IET Intell. Transp. Syst. 2021, 15, 754–764. [Google Scholar] [CrossRef]
- Joshan Athanesious, J.; Vasuhi, S.; Vaidehi, V.; Shiny Christobel, J.; Jerart Julus, L. Adaptive density based data mining tech-nique for detection of abnormalities in traffic video surveillance. J. Intell. Fuzzy Syst. 2020, 39, 3737–3747. [Google Scholar] [CrossRef]


| MinPts | β | α |
|---|---|---|
| 5 | 3 | 2 |
| Partition | Longitudinal Distance (m) | MinPts | Neighbor Diameter (m) |
|---|---|---|---|
| 1 | [50, maximum) | 3 | 1.95 |
| 2 | [20, 50) | 5 | 1.06 |
| 3 | (0, 20) | 7 | 0.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Gao, F.; Han, X.; Zhang, B. A New Density-Based Clustering Method Considering Spatial Distribution of Lidar Point Cloud for Object Detection of Autonomous Driving. Electronics 2021, 10, 2005. https://doi.org/10.3390/electronics10162005
Li C, Gao F, Han X, Zhang B. A New Density-Based Clustering Method Considering Spatial Distribution of Lidar Point Cloud for Object Detection of Autonomous Driving. Electronics. 2021; 10(16):2005. https://doi.org/10.3390/electronics10162005
Chicago/Turabian StyleLi, Caihong, Feng Gao, Xiangyu Han, and Bowen Zhang. 2021. "A New Density-Based Clustering Method Considering Spatial Distribution of Lidar Point Cloud for Object Detection of Autonomous Driving" Electronics 10, no. 16: 2005. https://doi.org/10.3390/electronics10162005
APA StyleLi, C., Gao, F., Han, X., & Zhang, B. (2021). A New Density-Based Clustering Method Considering Spatial Distribution of Lidar Point Cloud for Object Detection of Autonomous Driving. Electronics, 10(16), 2005. https://doi.org/10.3390/electronics10162005