
A Pairing Algorithm for Conflict-Free Crossings of Automated Vehicles at Lightless Intersections


Abstract
:1. Introduction
2. Previous Related Works
3. Methodology
- CAV penetration rate of 100%; moreover, CAVs have uniform driving specifications (same acceleration, deceleration, and speed range).
- Every CAV can communicate with other CAVs within a radius around the intersection region, i.e., is able to access information such as current speed, position, and approaching lane.
- Lane changing inside the intersection region is prohibited. Hence, it is assumed that every approaching CAV is already in its target lane in advance.
- When the CAVs reach the intersection, they follow a designed optimal path to perform the left or right turns.
- The infrastructure system is defined as an isolated system (i.e., no external influences such as spillbacks from other intersections can occur).
3.1. CAV’s Kinematics
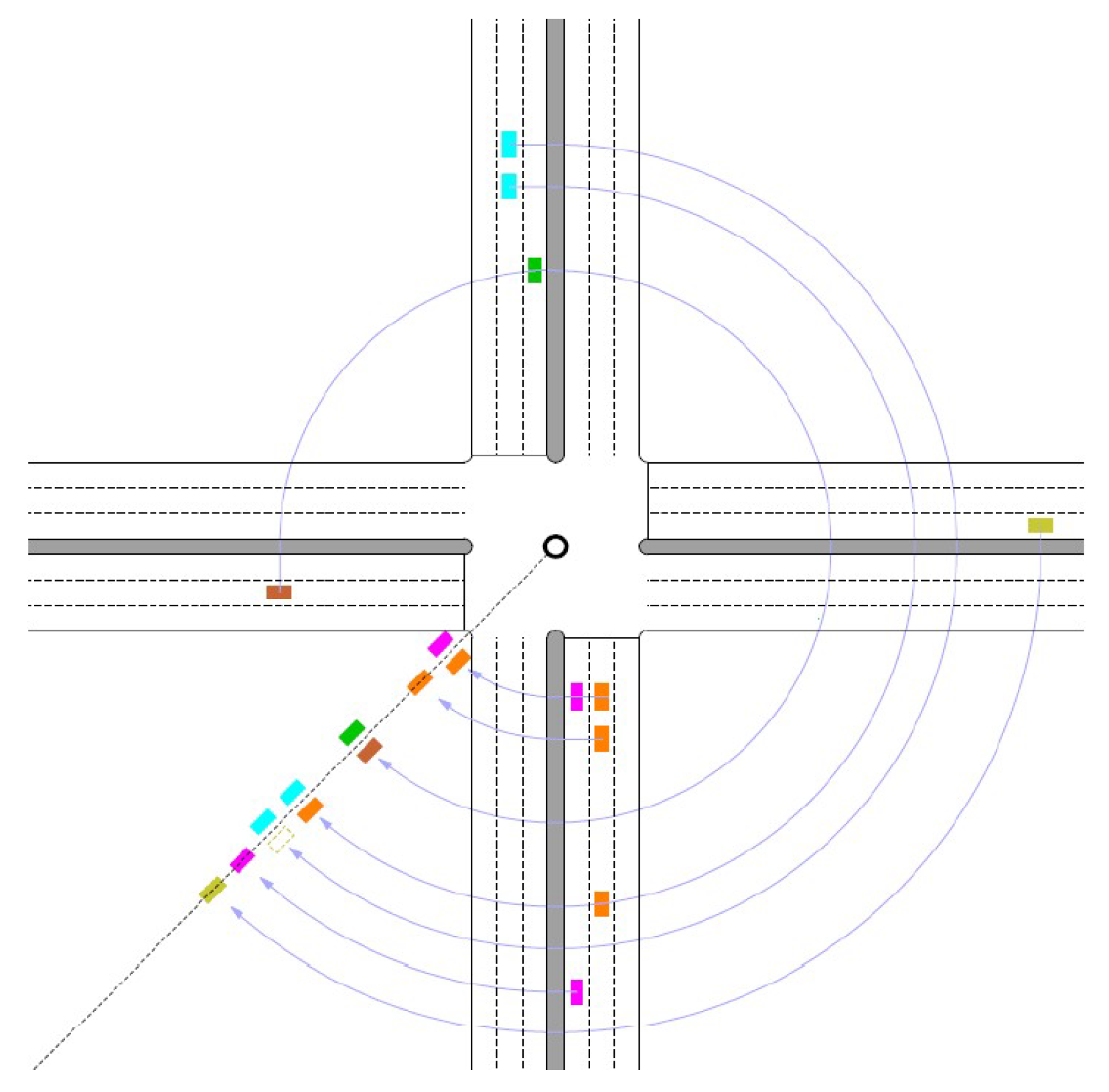
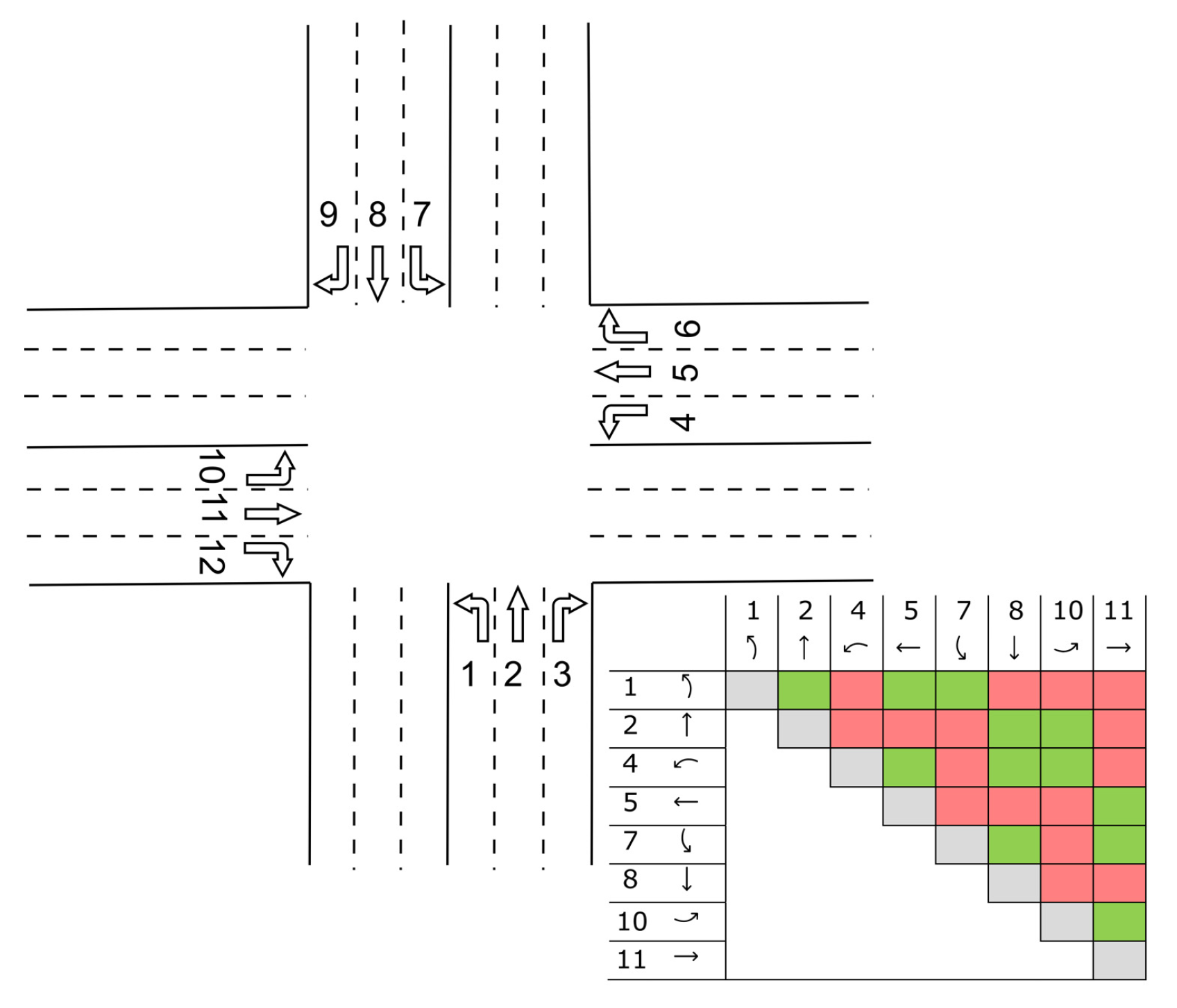
3.2. Traffic Coordination at Lightless Intersection
- They must perform non-conflicting movements when crossing the intersection,
- They must be within the pairing radius region, located at the beginning of the intersection approaches,
- Their relative distance must be smaller than or equal to the maximum permitted catch-up distance.
| Algorithm 1: Pairing algorithm for CAV i |
|
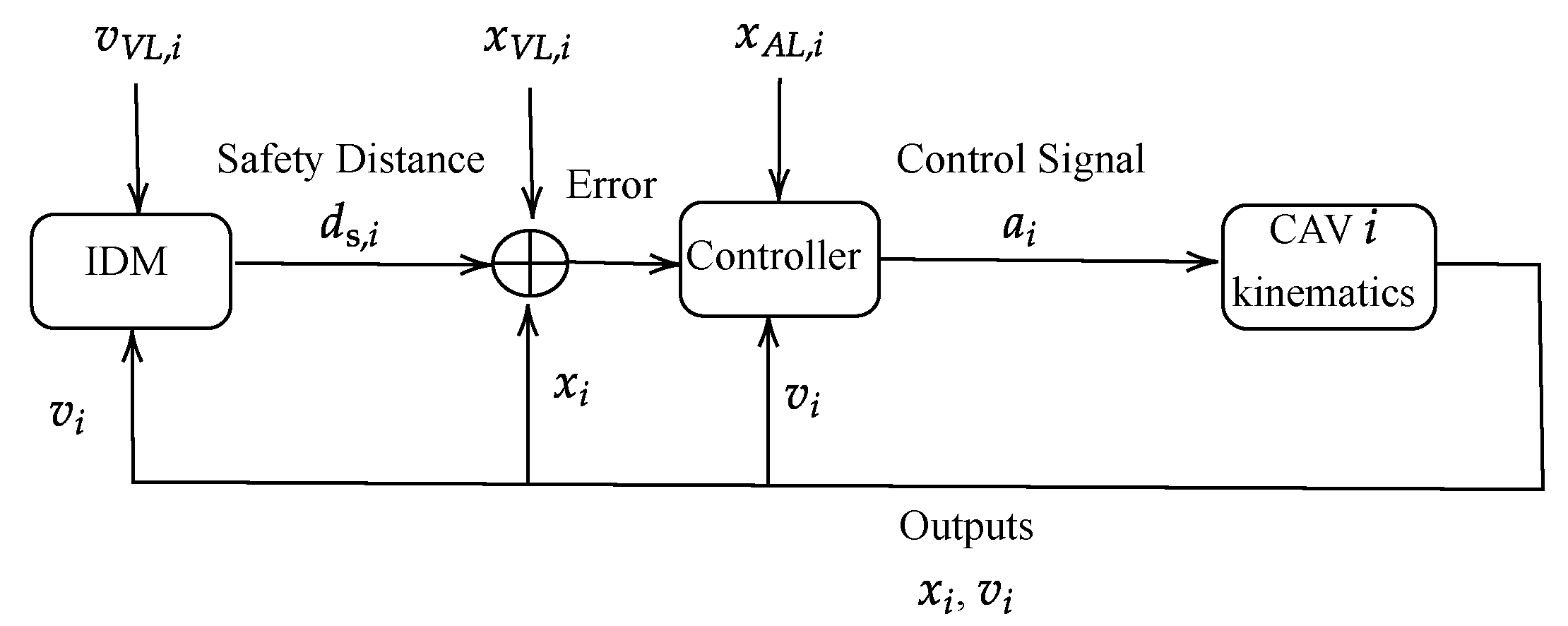
3.3. Controller Design
| Algorithm 2: Overview of methodology |
|
4. Experimental Simulation Results
4.1. Case Study I
4.2. Case Study II
4.2.1. Demand Scenarios
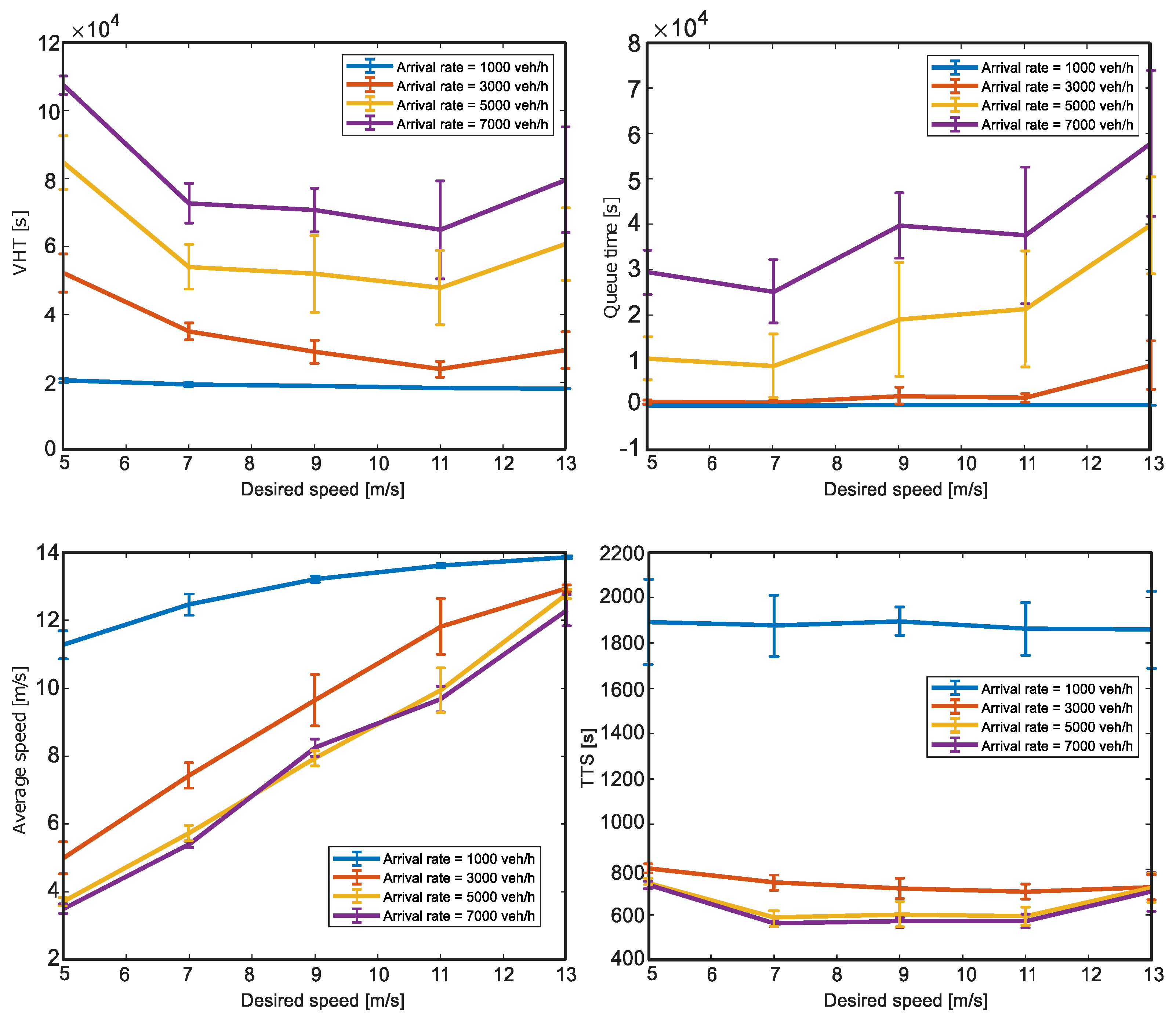
4.2.2. Desired Speed
4.2.3. Safety Distance
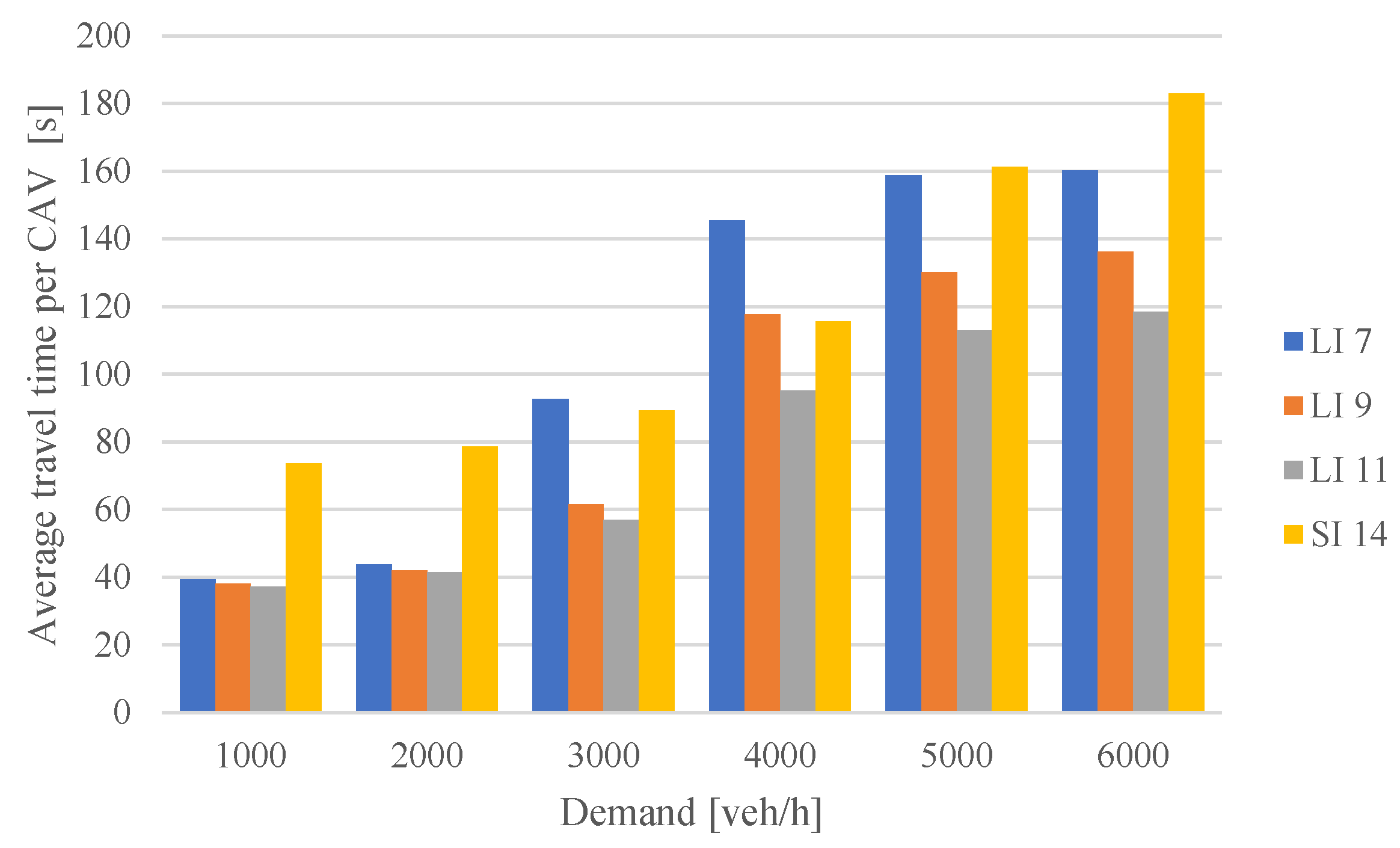
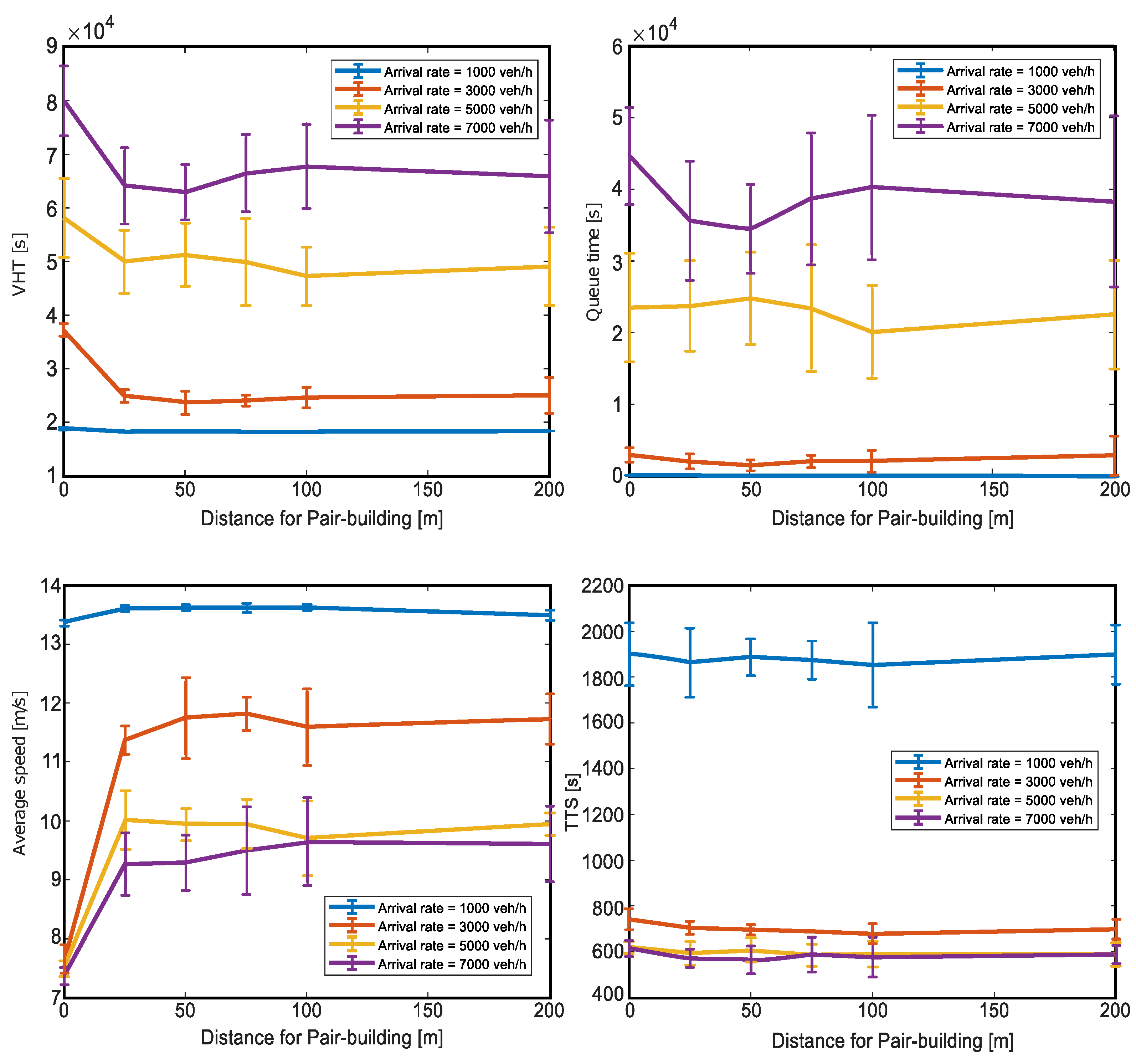
4.2.4. Pairing Region and Catch-Up Distance
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Diakaki, C.; Papageorgiou, M.; Aboudolas, K. A multivariable regulator approach to traffic-responsive network-wide signal control. Control Eng. Pract. 2002, 10, 183–195. [Google Scholar] [CrossRef]
- Kouvelas, A.; Lioris, J.; Fayazi, S.A.; Varaiya, P. Maximum pressure controller for stabilizing queues in signalized arterial networks. Transp. Res. Rec. 2014, 2421, 133–141. [Google Scholar] [CrossRef] [Green Version]
- Mercader, P.; Uwayid, W.; Haddad, J. Max-pressure traffic controller based on travel times: An experimental analysis. Transp. Res. Part C Emerg. Technol. 2020, 110, 275–290. [Google Scholar] [CrossRef]
- Genser, A.; Kouvelas, A. Optimum route guidance in multi-region networks. A linear approach. In Proceedings of the 99th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2020. [Google Scholar]
- Xu, B.; Li, S.E.; Bian, Y.; Li, S.; Ban, X.J.; Wang, J.; Li, K. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transp. Res. Part C Emerg. Technol. 2018, 93, 322–334. [Google Scholar] [CrossRef]
- Golembiewski, G.; Chandler, B.E. Intersection Safety: A Manual for Local Rural Road Owners; FHWA-SA-11-08; Office of Safety Federal Highway Administration: Washington, DC, USA, 2011.
- Muralidharan, A.; Pedarsani, R.; Varaiya, P. Analysis of fixed-time control. Transp. Res. Part B Methodol. 2015, 73, 81–90. [Google Scholar] [CrossRef] [Green Version]
- He, Q.; Head, K.L.; Ding, J. Multi-modal traffic signal control with priority, signal actuation and coordination. Transp. Res. Part C Emerg. Technol. 2014, 46, 65–82. [Google Scholar] [CrossRef]
- Pandit, K.; Ghosal, D.; Zhang, H.M.; Chuah, C. Adaptive Traffic Signal Control with Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 1459–1471. [Google Scholar] [CrossRef] [Green Version]
- Zaidi, A.A.; Kulcsár, B.; Wymeersch, H. Back-Pressure Traffic Signal Control With Fixed and Adaptive Routing for Urban Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2134–2143. [Google Scholar] [CrossRef] [Green Version]
- Lämmer, S.; Helbing, D. Self-control of traffic lights and vehicle flows in urban road networks. J. Stat. Mech. Theory Exp. 2008, 2008, P04019. [Google Scholar] [CrossRef] [Green Version]
- Genser, A.; Neuenschwander, M.; Kouvelas, A. Wirkungsanalyse Selbst-Steuerung; IVT, ETH: Zurich, Switzerland, 2020. [Google Scholar]
- Mannering, F.L.; Washburn, S. Principle of Highway Engineering and Traffic Analysis, 3rd ed.; John Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I. Revisiting Street Intersections Using Slot- Based Systems. PLoS ONE 2016, 11, e014960. [Google Scholar] [CrossRef] [Green Version]
- Dresner, K.; Stone, P. Multiagent traffic management: A reservation-based intersection control mechanism. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems, New York, NY, USA, 19–23 July 2004; pp. 530–537. [Google Scholar]
- Kamal, M.A.S.; Imura, J.; Ohata, A.; Hayakawa, T.; Aihara, K. Coordination of automated vehicles at a traffic-lightless intersection. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), Hague, The Netherlands, 6–9 October 2013; pp. 922–927. [Google Scholar]
- Kamal, M.A.S.; Imura, J.; Hayakawa, T.; Ohata, A.; Aihara, K. A Vehicle-Intersection Coordination Scheme for Smooth Flows of Traffic Without Using Traffic Lights. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1136–1147. [Google Scholar] [CrossRef]
- Mirheli, A.; Hajibabai, L.; Hajbabaie, A. Development of a signal-head-free intersection control logic in a fully connected and autonomous vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 92, 412–425. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Zhang, Y.; Jia, N.; Ge, Y. Near-Optimal Online Motion Planning of Connected and Automated Vehicles at a Signal-Free and Lane-Free Intersection. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Suzhou, China, 26–30 June 2018; pp. 1432–1437. [Google Scholar] [CrossRef]
- Bichiou, Y.; Rakha, H.A. Developing an Optimal Intersection Control System for Automated Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1908–1916. [Google Scholar] [CrossRef]
- Bichiou, Y.; Rakha, H.A. Real-time optimal intersection control system for automated/cooperative vehicles. Int. J. Transp. Sci. Technol. 2019, 8, 1–12. [Google Scholar] [CrossRef]
- Deng, Z.; Shi, Y.; Han, Q.; Lv, L.; Shen, W. A Conflict Duration Graph-Based Coordination Method for Connected and Automated Vehicles at Signal-Free Intersections. Appl. Sci. 2020, 10, 6223. [Google Scholar] [CrossRef]
- Yang, B.; Monterola, C. Efficient intersection control for minimally guided vehicles: A self-organised and decentralised approach. Transp. Res. Part C Emerg. Technol. 2016, 72, 283–305. [Google Scholar] [CrossRef]
- Yang, B.; Monterola, C. A simple distributed algorithm for lightless intersection control based on non-linear interactions between vehicles. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Zheng, Y.; Jin, L.; Jiang, Y.; Wang, F.; Guan, X.; Ji, S.; Xu, J. Research on cooperative vehicle intersection control scheme without using traffic lights under the connected vehicles environment. Adv. Mech. Eng. 2017, 9, 1687814017719219. [Google Scholar] [CrossRef]
- Malikopoulos, A.A.; Cassandras, C.G.; Zhang, Y.J. A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersections. Automatica 2018, 93, 244–256. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; HomChaudhuri, B.; Pisu, P. Hierarchical distributed coordination strategy of connected and automated vehicles at multiple intersections. J. Intell. Transp. Syst. 2018, 22, 144–158. [Google Scholar] [CrossRef]
- Mirheli, A.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. A consensus-based distributed trajectory control in a signal-free intersection. Transp. Res. Part C Emerg. Technol. 2019, 100, 161–176. [Google Scholar] [CrossRef]
- Zhang, Y.; Cassandras, C.G. Joint Time and Energy-Optimal Control of Connected Automated Vehicles at Signal-Free Intersections with Speed-Dependent Safety Guarantees. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13December 2019; pp. 329–334. [Google Scholar]
- Kloock, M.; Scheffe, P.; Marquardt, S.; Maczijewski, J.; Alrifaee, B.; Kowalewski, S. Distributed Model Predictive Intersection Control of Multiple Vehicles. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1735–1740. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent Traffic Management: An Improved Intersection Control Mechanism; AAMAS ’05; Association for Computing Machinery: New York, NY, USA, 2005; pp. 471–477. [Google Scholar]
- Rios-Torres, J.; Malikopoulos, A.A. A Survey on the Coordination of Connected and Automated Vehicles at Intersections and Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Wei, H.; Mashayekhy, L.; Papineau, J. Intersection Management for Connected Autonomous Vehicles: A Game Theoretic Framework. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 583–588. [Google Scholar]
- Xu, H.; Zhang, Y.; Cassandras, C.G.; Li, L.; Feng, S. A bi-level cooperative driving strategy allowing lane changes. Transp. Res. Part C Emerg. Technol. 2020, 120, 102773. [Google Scholar] [CrossRef]
- Namazi, E.; Li, J.; Lu, C. Intelligent Intersection Management Systems Considering Autonomous Vehicles: A Systematic Literature Review. IEEE Access 2019, 7, 91946–91965. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested Traffic States in Empirical Observations and Microscopic Simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Zhu, M.; Wang, X.; Tarko, A.; Fang, S. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.5 m/s | −3 m/s | 14 m/s | 1 m/s | 1.2 s | 5 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chavoshi, K.; Genser, A.; Kouvelas, A. A Pairing Algorithm for Conflict-Free Crossings of Automated Vehicles at Lightless Intersections. Electronics 2021, 10, 1702. https://doi.org/10.3390/electronics10141702
Chavoshi K, Genser A, Kouvelas A. A Pairing Algorithm for Conflict-Free Crossings of Automated Vehicles at Lightless Intersections. Electronics. 2021; 10(14):1702. https://doi.org/10.3390/electronics10141702
Chicago/Turabian StyleChavoshi, Kimia, Alexander Genser, and Anastasios Kouvelas. 2021. "A Pairing Algorithm for Conflict-Free Crossings of Automated Vehicles at Lightless Intersections" Electronics 10, no. 14: 1702. https://doi.org/10.3390/electronics10141702
APA StyleChavoshi, K., Genser, A., & Kouvelas, A. (2021). A Pairing Algorithm for Conflict-Free Crossings of Automated Vehicles at Lightless Intersections. Electronics, 10(14), 1702. https://doi.org/10.3390/electronics10141702