
Power Balance and Power Factors of Distorted Electrical Systems and Variable Speed Asynchronous Electric Drives

 , , ,
, , , 

Abstract
:1. Introduction
2. Theoretical Determination of the Power Factor of a Distorted Electrical System
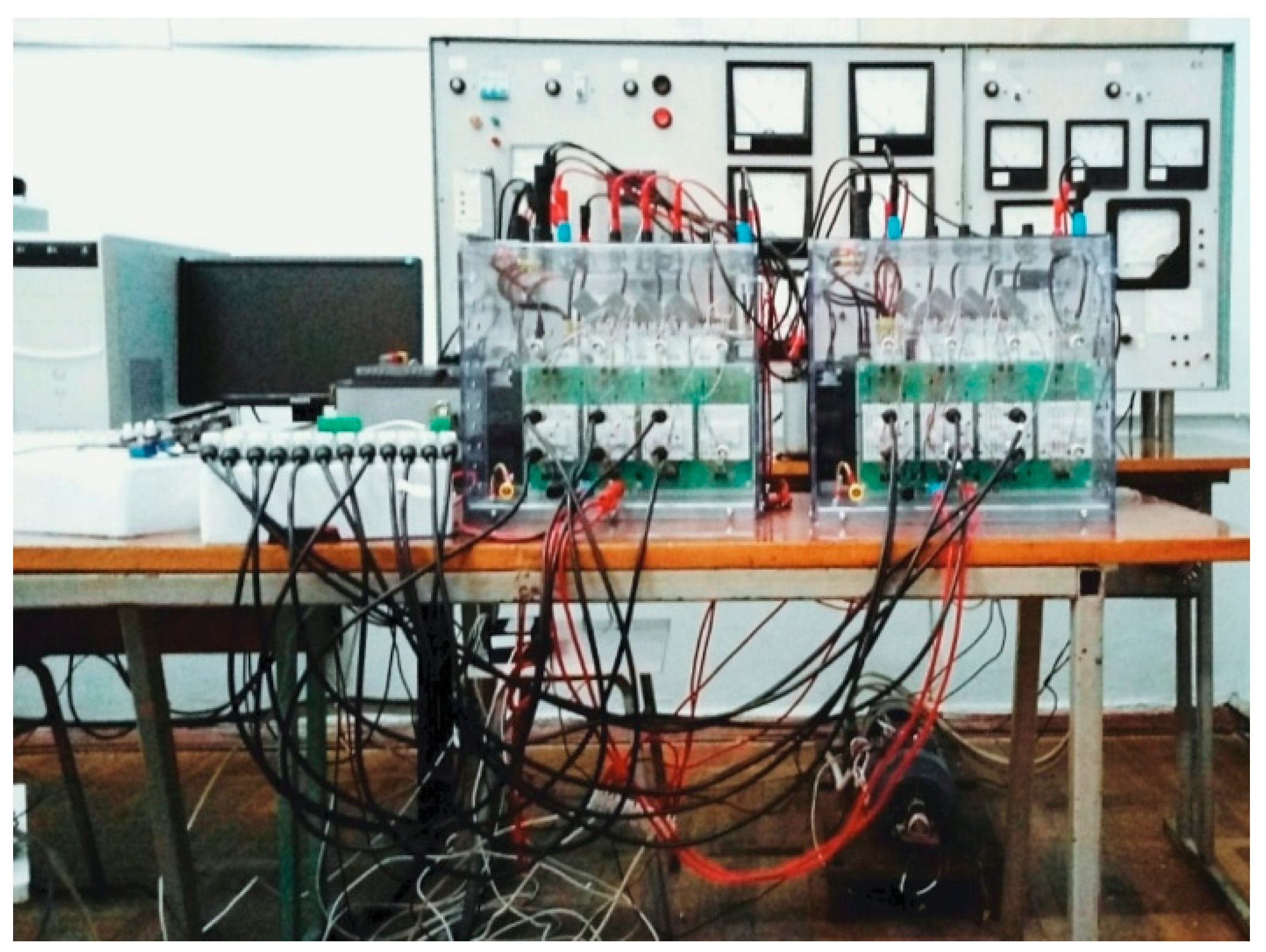
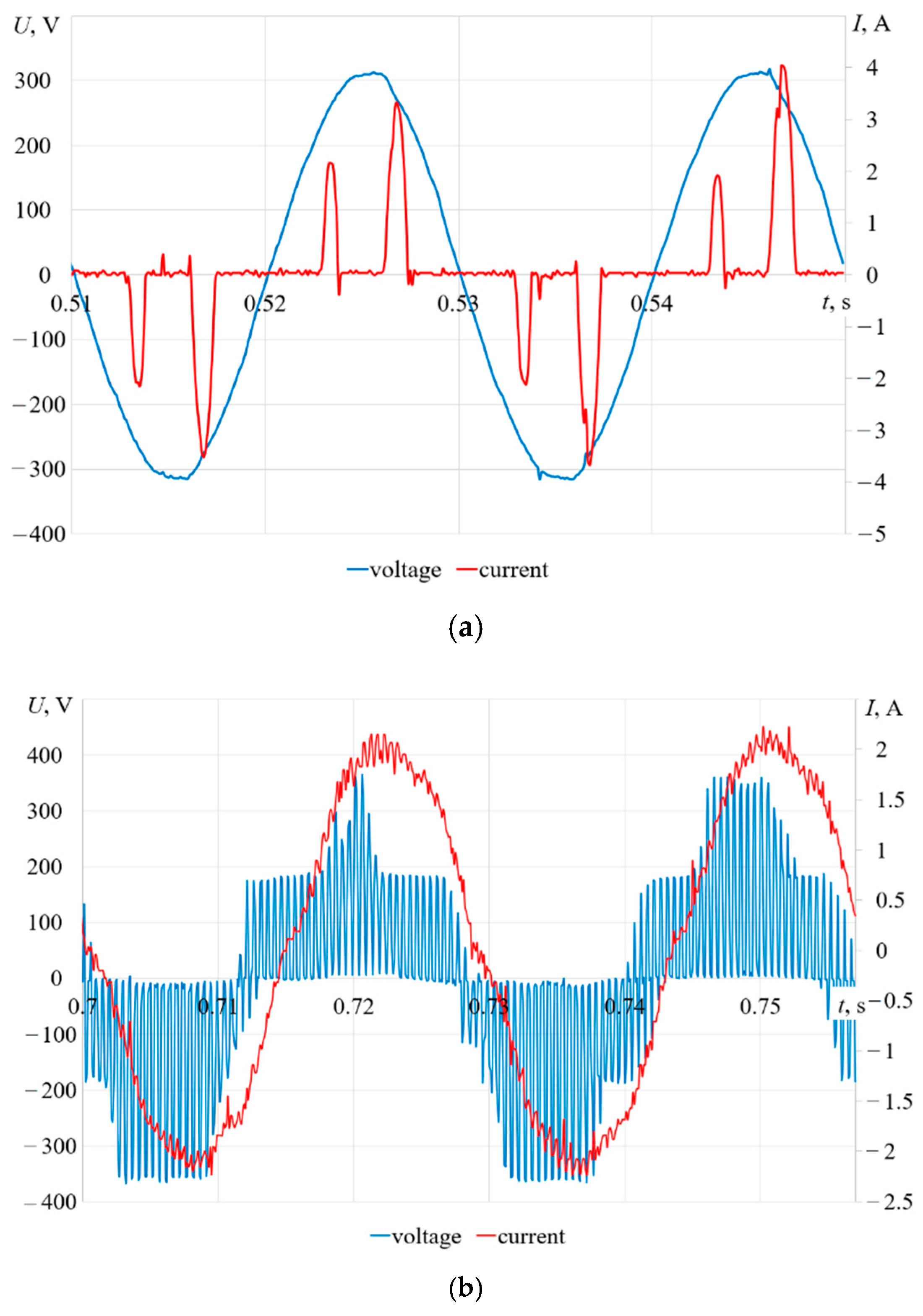
3. Experimental Study of Adjustable Asynchronous Electric Drive
4. Conclusions
- The analysis of electro-energetic and electromagnetic compatibility in distorted electrical systems requires considering not only the reactive power due to fundamental current phase shift and voltage but also other “inactive” powers, including reactive power due to the higher harmonic components. Any electrical system, especially a distorted one, requires determination of its electromagnetic and electro-energetic compatibility. Expressions of the power factor as a quantitative parameter of electro-energetic and electromagnetic compatibility for distorted systems are proposed.
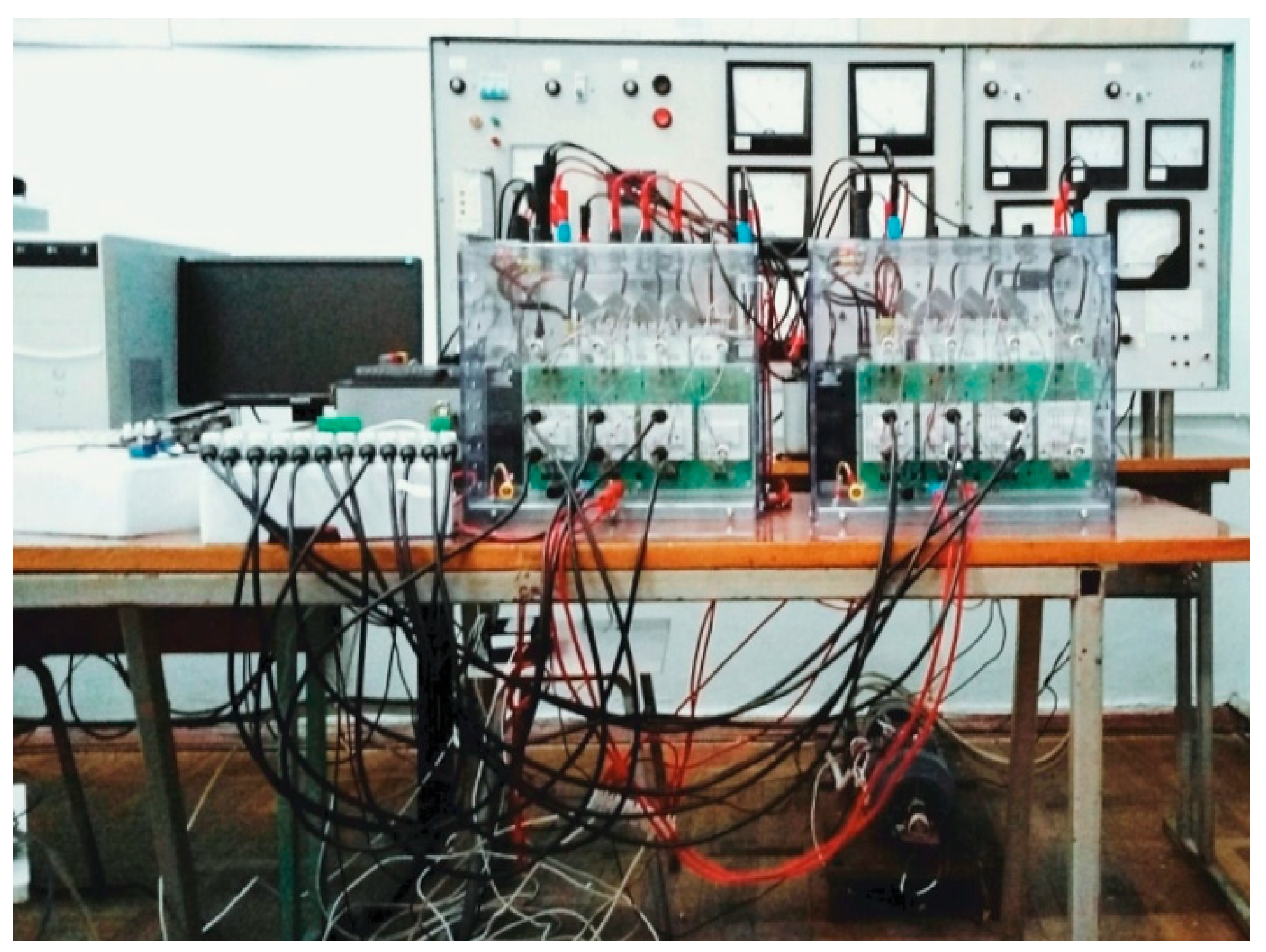
- The analysis and determination of the power components and power factor of a frequency-controlled asynchronous electric drive is carried out. The possibility of determining this coefficient in two ways is confirmed by using relatively inexpensive and generally available equipment, which is predominant in practical application.
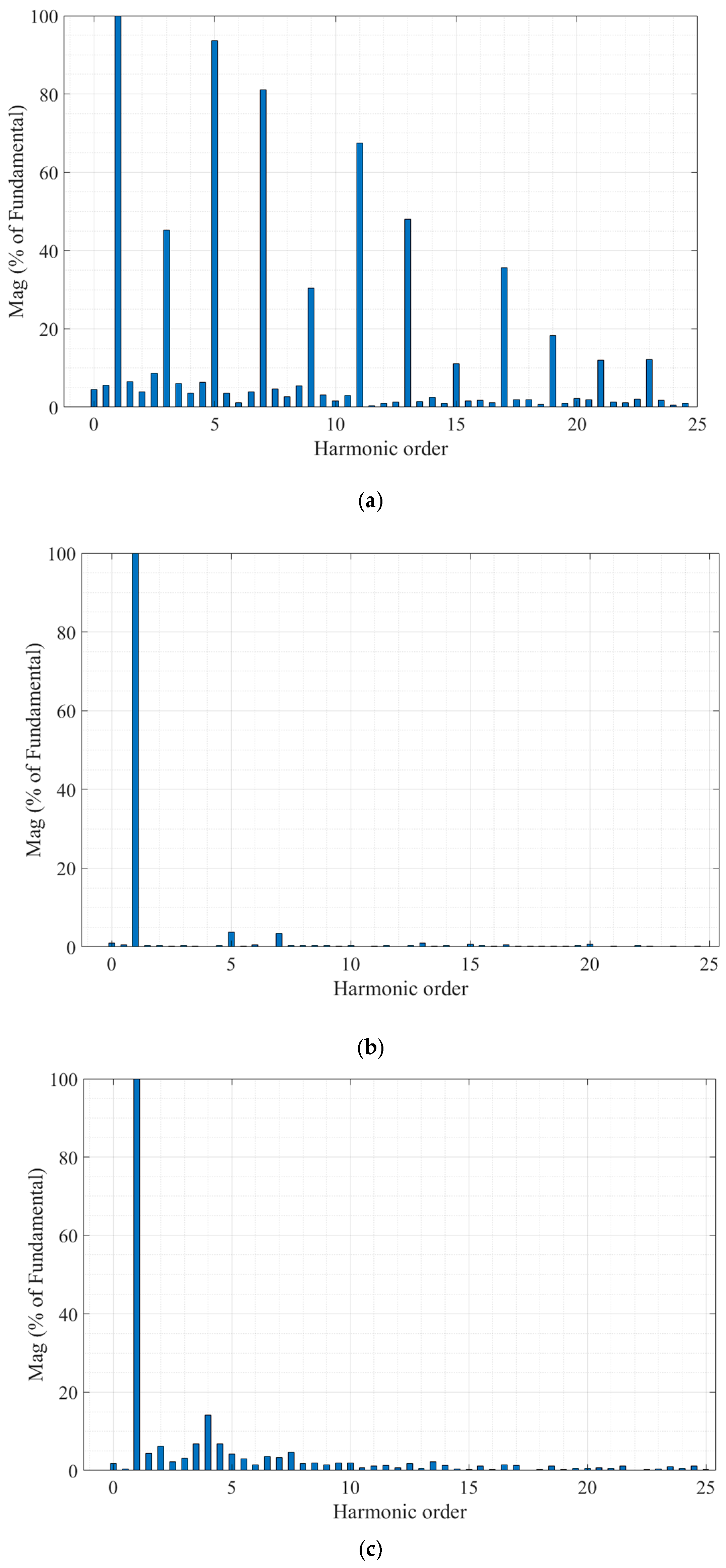
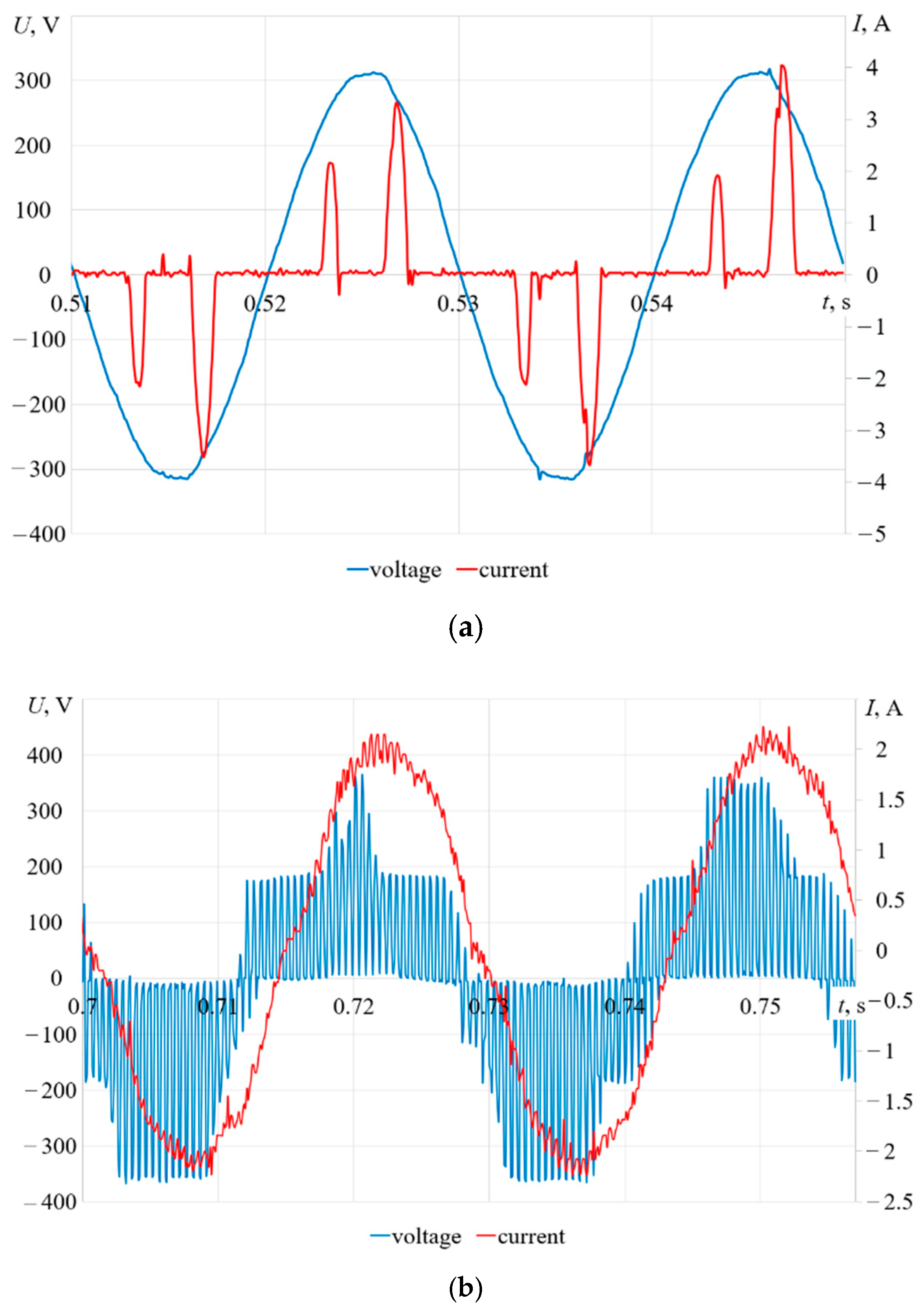
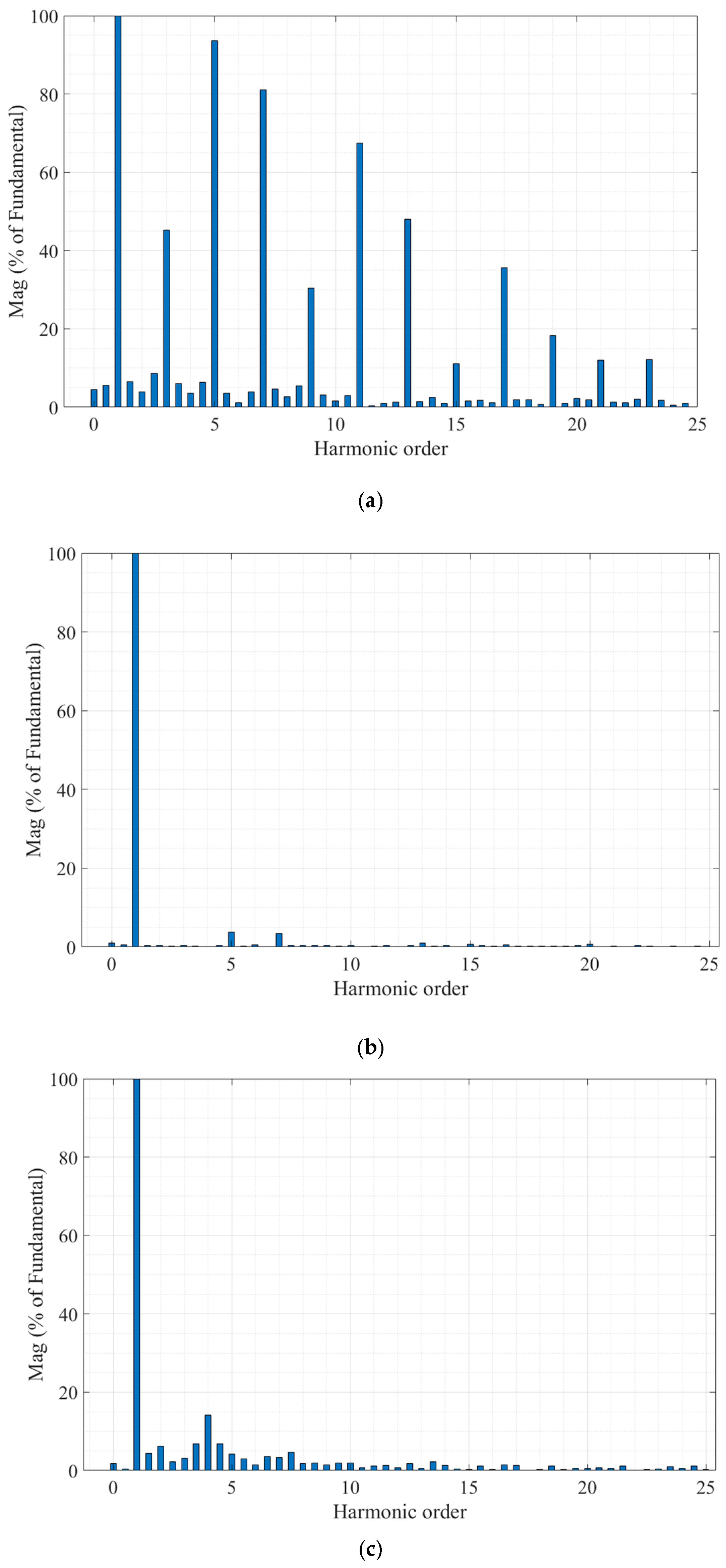
- The balance of powers at different frequencies of voltages and currents of the electrical system of a controlled asynchronous electric drive is experimentally confirmed. The method for determining the coefficients from the results of oscillograms is more preferable. Measuring instruments are characterized by accuracy classes, the increase in which leads to a significant increase in their cost. There is a relative similarity of coefficient values determined from the measured power values and from the results of processing oscillograms using the coefficients of non-sinusoidal distortions. The shift coefficient on the grid side under consideration is practically equal to 1.
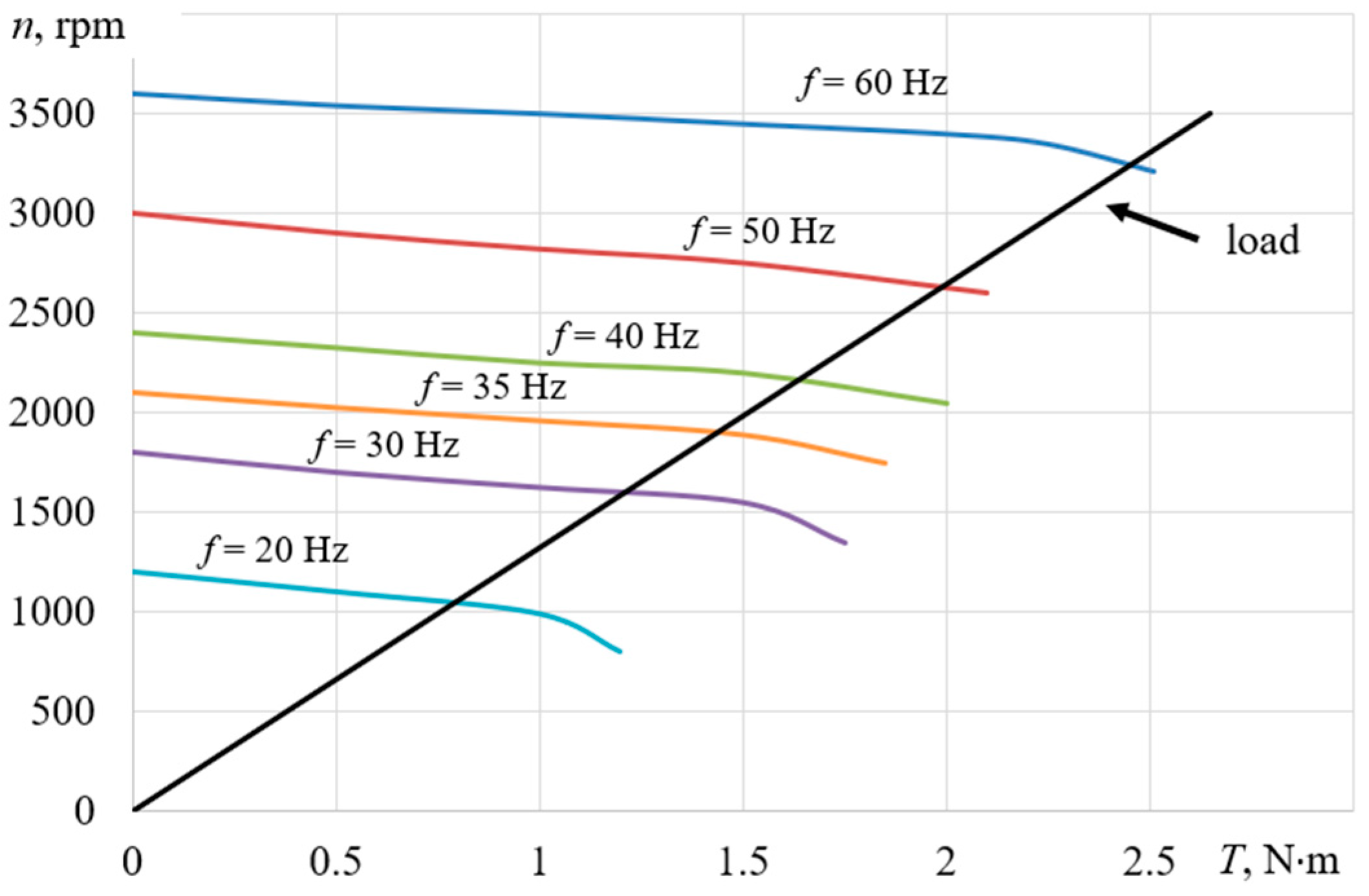
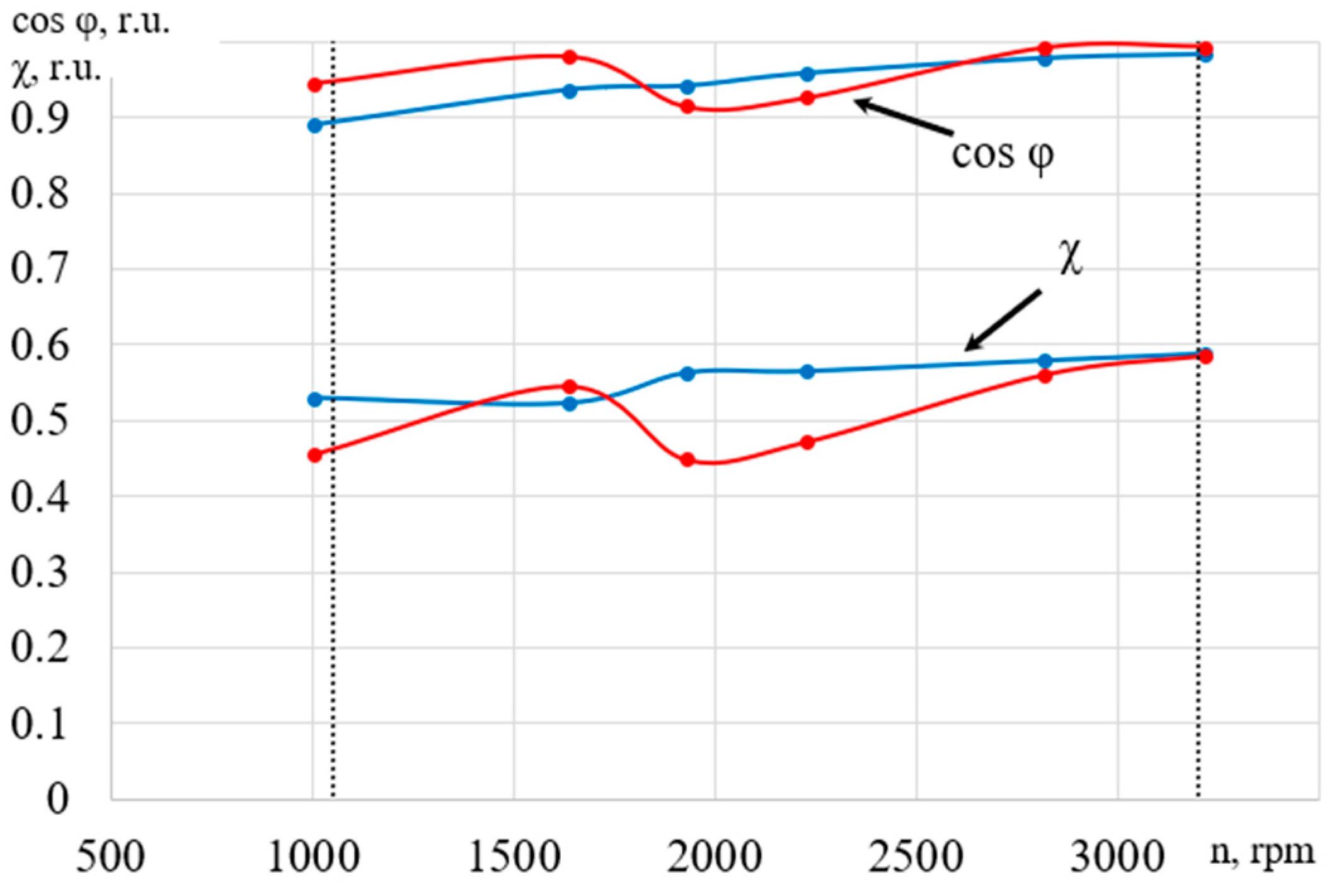
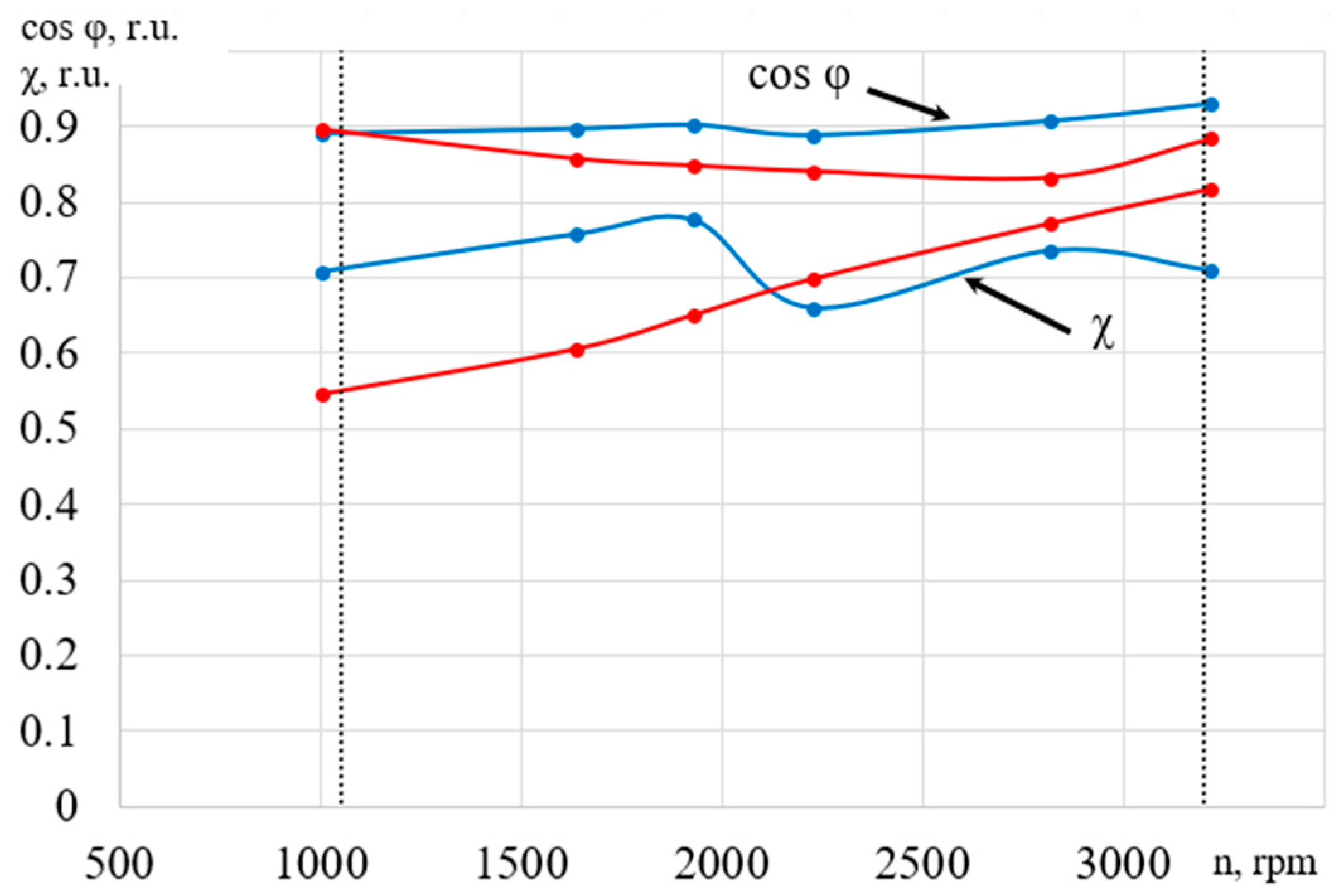
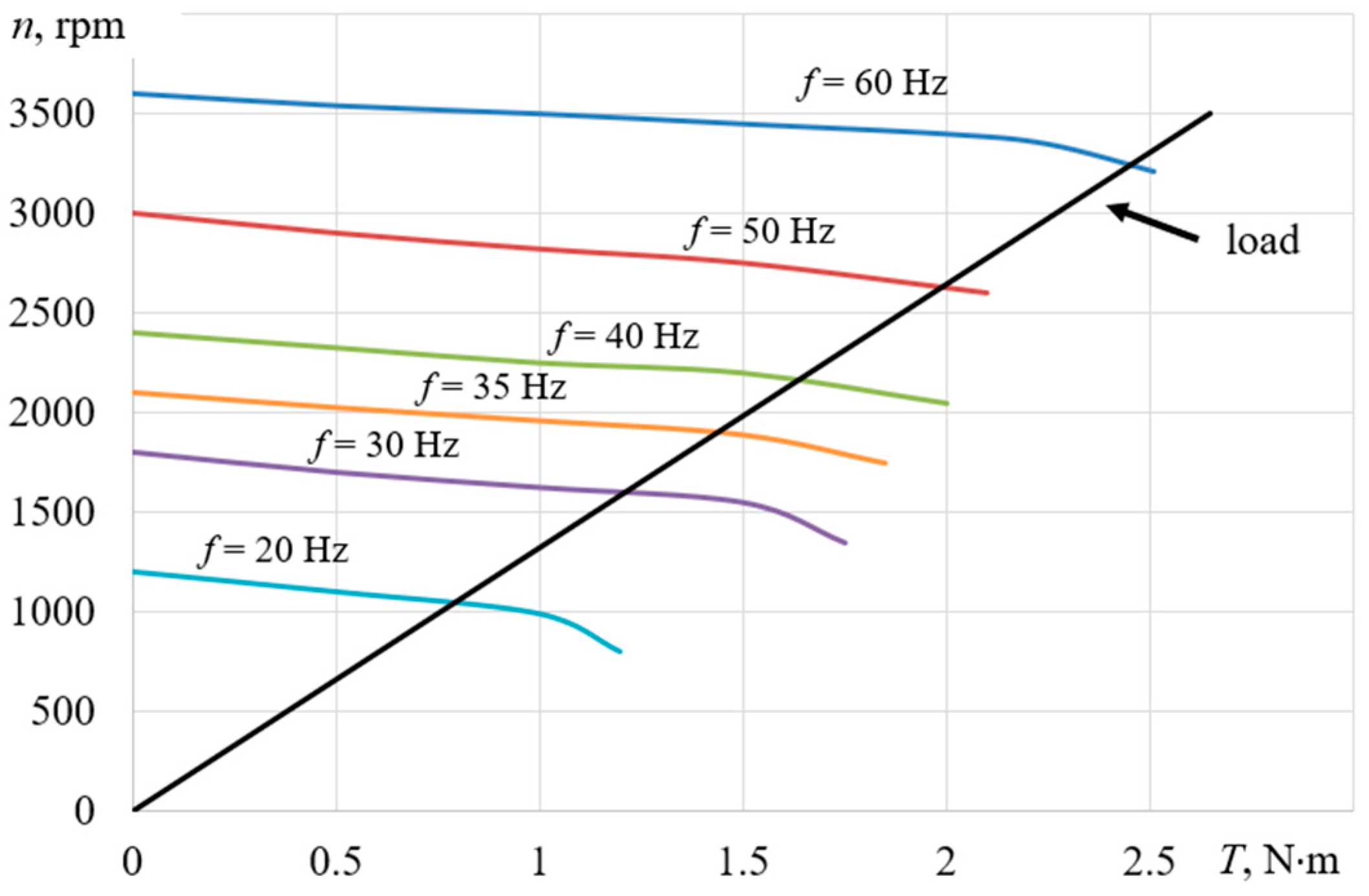
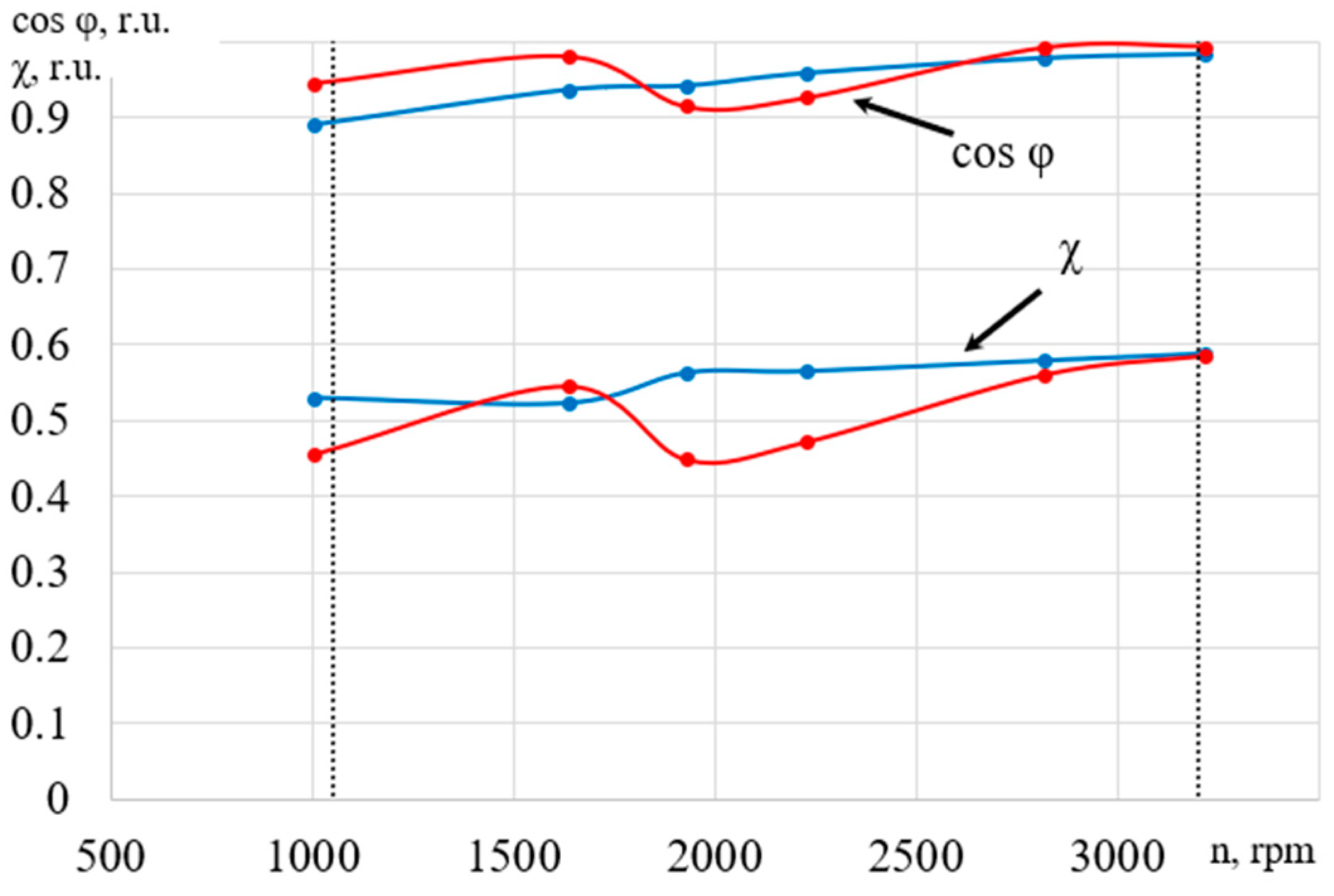
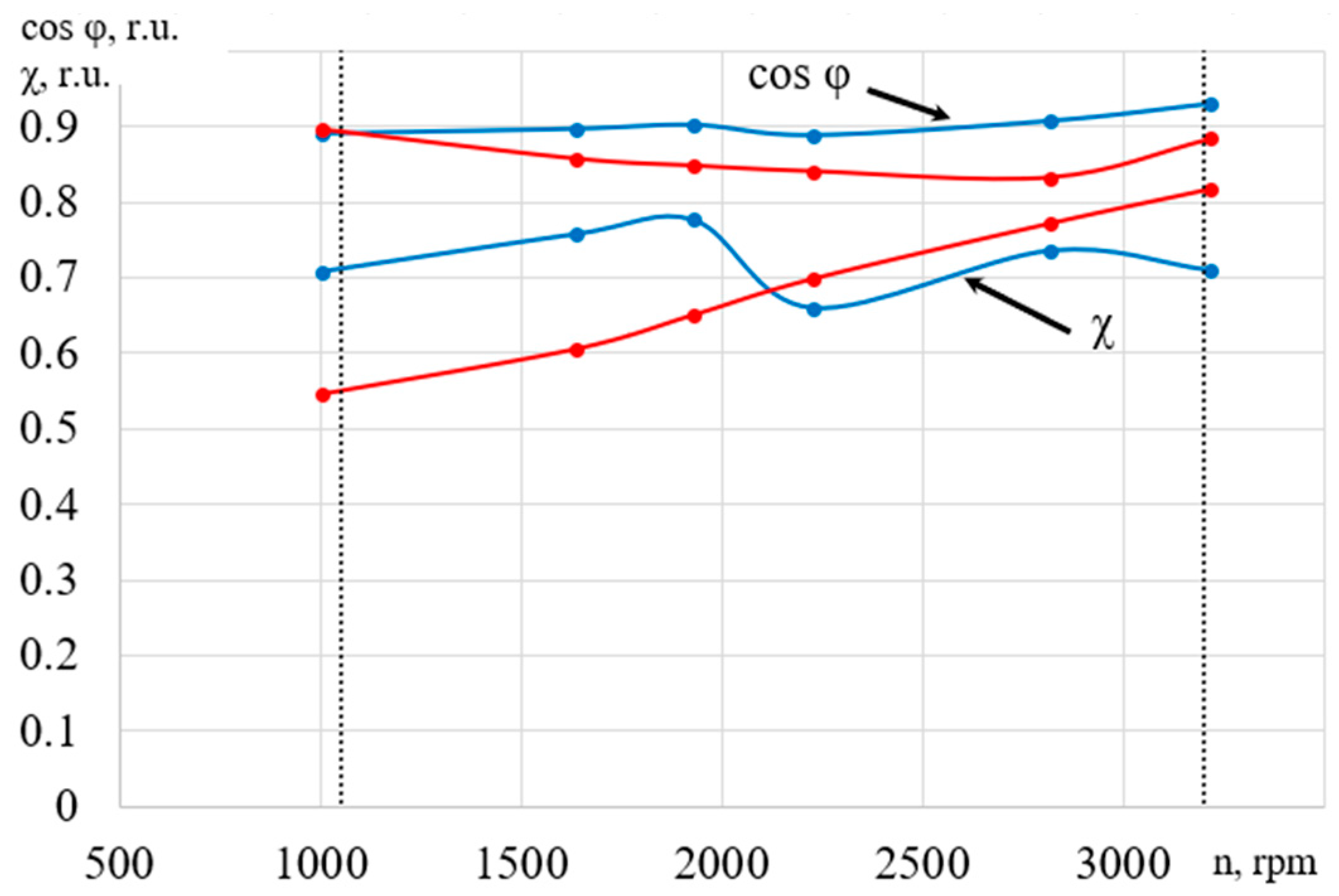
- The power factor and phase shift factors of AM and ASED at a certain load are calculated as average over a certain range of speed or are determined by considering a given tachogram of speed changes. For the studies performed, the value of the power factors when operating on a certain tachogram based on the results of processing the oscillograms at the drive input and at the motor input are as follows: χED = 0.506, χIM = 0.698.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| —coefficients of voltage unbalance | |
| —coefficients of current unbalance | |
| —coefficients of voltage lack of balance | |
| —coefficients of current lack of balance | |
| THD | —total harmonic distortion |
| ASED | —asynchronous electric drives |
| —apparent power | |
| —effective values of phase voltages | |
| —effective values of phase currents | |
| —effective values of the fundamental harmonics of phase voltages | |
| —effective values of the fundamental harmonics of phase currents | |
| —total values of higher harmonics of voltages | |
| —total values of higher harmonics of currents | |
| —current distortion power | |
| —voltage distortion power | |
| —harmonic distortion power | |
| —effective values of zero, direct and reverse voltage sequences | |
| —effective values of zero, direct and reverse current sequences | |
| —active power | |
| —reactive power | |
| —distortion power | |
| —“pulsating” power | |
| —“latent” power | |
| —“modular” power | |
| —total harmonic distortion of current | |
| —total harmonic distortion of voltage | |
| —unity phasor = ej120° | |
| —shift angle between the first harmonics of current and voltage | |
| —power factor |
References
- da Silva, R.P.B.; Quadros, R.; Shaker, H.R.; Carlos Pereira da Silva, L. Harmonic Interaction Effects on Power Quality and Electrical Energy Measurement System. In Proceedings of the 2019 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Rome, Italy, 27–29 November 2019. [Google Scholar]
- Petružela, M.; Blažek, V.; Vysocký, J. Analysis of Appliance Impact on Total Harmonic Distortion in Off-Grid System. Recent Advances in Electrical Engineering and Related Sciences: Theory and Application; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Salman, M.; Haq, I.U.; Ahmad, T.; Ail, H.; Qamar, A.; Basit, A.; Khan, M.; Iqbal, J. Minimization of total harmonic distortions of cascaded H-bridge multilevel inverter by utilizing bio inspired AI algorithm. J. Wirel. Com. Netw. 2020, 66. [Google Scholar] [CrossRef] [Green Version]
- Manjesh Hasitha, K.; Bhoi, A.K.; Garg, A. Comparative Study of Harmonics and Total Harmonic Distortion of Five-Phase Inverter Drive with Five-Phase Multilevel Inverter Drive Using Simulink/MATLAB; Springer: Singapore, 2018. [Google Scholar]
- Benslimane, A.; Ouariachi, M.E.; Bouchnaif, J.; Grari, K. Analysis of the Electrical Unbalance Caused by the Moroccan High-Speed Railway in the High Voltage Power Grid for the Starting Horizon (2018) and the Horizon (2030). In Proceedings of the 1st International Conference on Electronic Engineering and Renewable Energy, Saidia, Morocco, 15–17 April 2018. [Google Scholar]
- Phan, A.T.; Wira, P.; Hermann, G. A dedicated state space for power system modeling and frequency and unbalance estimation. Evol. Syst. 2018, 9, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Zhuo, F.; Yi, H.; Geng, Z. Control strategy for microgrid under three-phase unbalance condition. J. Mod. Power Syst. Clean Energy 2016, 4, 94–102. [Google Scholar] [CrossRef] [Green Version]
- Mukund, R.P. Introduction to Electrical Power and Power Electronics; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2013; p. 519. [Google Scholar]
- IEEE Std 1459-2010. IEEE Standart Definition for the Measurement of Electric Power Quantities Under Sinusoidal, Nonsinusoidal, Balanced, or Unbalanced Conditions; IEEE Power & Energy Society, IEEE-SA Standards Board; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Melkebeek, J.A. Electrical Machines and Drives Fundamentals and Advanced Modelling; Springer: Cham, Switzerland, 2018; 740p. [Google Scholar]
- Stefanos, N.M. Power Electronics and Motor Drive Systems; Elsevier: London, UK, 2017; 987p. [Google Scholar]
- Pyrhonen, J.; Hrabovcova, R.V.; Semken, S. Electrical Machine Drives Control An Introduction; John Wiley & Sons Ltd.: Chichester, UK, 2016; 527p. [Google Scholar]
- Pivnyak, G.G.; Volkov, A.V. Modern Frequency-Controlled Asynchronous Electric Drives with Pulse-Width Modulation: Monograph; National Mining University: Dnepropetrovsk, Ukraine, 2006; 470p. [Google Scholar]
- IEC 60034-30-1. Rotating Electrical Machines. Part. 30-1. Efficiency Classes of Line Operated AC Motors (IE Code); International Electrotechnical Commission International Standard: Geneva, Switzerland, 2014; p. 54. [Google Scholar]
- IEC 60034-30-2. Rotating Electrical Machines. Part 30-2: Efficiency Classes of Variable Speed AC Motors (IE-Code); International Electrotechnical Commission International Standard: Geneva, Switzerland, 2016; p. 22. [Google Scholar]
- Mikitchenko, A.Y.; Shevchenko, A.N.; Biryukov, Y.A.; Shestakov, P.R. Efficiency of conversion of electrical energy in thyristor and transistor electric drives of excavators. Min. Inform. Anal. Bull. 2009, 12, 247–260. [Google Scholar]
- Andrienko, V.M. Determination of energy indicators of asynchronous motors when powered by static frequency converters. Electric. Eng. Electromech. 2010, 3, 5–7. [Google Scholar]
- Vasiliev, B.Y. Electric drive. Power engineering of an electric drive: A Textbook; SOLON-Press: Carmignano di Brenta, Italy, 2015; 268p. [Google Scholar]
- Kavitha, G.; Mohammed Rafeequdin, I. Hybrid Techniques for Reducing Total Harmonic Distortion in a Inverter-Fed Permanent Magnet—SM Drive System; Springer: Singapore, 2017. [Google Scholar]
- Adekitan, A.I. A New Definition of Voltage Unbalance Using Supply Phase Shift. J. Control. Autom. Electr. Syst. 2020, 31, 718–725. [Google Scholar] [CrossRef]
- Guasch-Pesquer, L.; Jaramillo-Matta, A.A.; Gonzalez-Molina, F.; Garcia-Rios, S. Analysis of Current Unbalance and Torque Ripple Generated by Simulations of Voltage Unbalance in Induction Motors. In Proceedings of the WEA 2017 Communications in Computer and Information Science, Cartagena, Colombia, 27–29 September 2017. [Google Scholar]
- Firago, B.I.; Palyavchik, L.B. The theory of electric drive. In Techno Perspective; Vysheysha Shkola: Minsk, Belarus, 2007; 585p. [Google Scholar]
- Petrushin, V.S.; Yenoktaiev, R.N.; Shestakov, O.I.; Prokopenko, N.S. Allowance for loss of the higher harmonic in the controlled induction motors. In Bulletin of NTU “KhPI”; Series: “Electric Machines and Electromechanical Energy Conversion”; NTU “KhPI”: Kharkiv, Ukraine, 2017; Volume 1, pp. 101–105. [Google Scholar]
- IEC/TS 60034-17:2006. Rotating Electrical Machines—Part 17: Cage Induction Motors When Fed from Converters—Application Guide; International Electrotechnical Commission International Standard: Geneva, Switzerland, 2006. [Google Scholar]
- IEC/TS 60034-25:2007. Rotating Electrical Machines—Part 25: Guidance for the Design and Performance of a.c. Motors Specifically Designed for Converter Supply; International Electrotechnical Commission International Standard: Geneva, Switzerland, 2007. [Google Scholar]
- IEC 60034-2-3. Rotating Electrical Machines. Part 2–3. Specific Test Methods for Determining Losses and Efficiency of Converter-Fed AC Induction Motors. Available online: https://files.stroyinf.ru/Data/619/61981.pdf (accessed on 21 May 2021).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S, V·A | P, W | Q, VAr | D, VAr | |
|---|---|---|---|---|
| Grid side | 921 | 395 | 175 | 814 |
| Motor side | 470 | 338 | 210 | 246 |
| Parameter | Measurement Method | |
|---|---|---|
| Devices | Oscillograms | |
| χED | 0.563 | 0.45 |
| cosφ1 ED | 0.942 | 0.914 |
| THDI ED | – | 1.772 |
| Parameter | Measurement Method | |
|---|---|---|
| Devices | Oscillograms | |
| χIM | 0.777 | 0.651 |
| cosφ1 IM | 0.902 | 0.848 |
| THDI IM | – | 0.0826 |
| THDU IM | – | 0.828 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrushyn, V.; Horoshko, V.; Plotkin, J.; Almuratova, N.; Toigozhinova, Z. Power Balance and Power Factors of Distorted Electrical Systems and Variable Speed Asynchronous Electric Drives. Electronics 2021, 10, 1676. https://doi.org/10.3390/electronics10141676
Petrushyn V, Horoshko V, Plotkin J, Almuratova N, Toigozhinova Z. Power Balance and Power Factors of Distorted Electrical Systems and Variable Speed Asynchronous Electric Drives. Electronics. 2021; 10(14):1676. https://doi.org/10.3390/electronics10141676
Chicago/Turabian StylePetrushyn, Viktor, Vasiliy Horoshko, Juriy Plotkin, Nurgul Almuratova, and Zhanar Toigozhinova. 2021. "Power Balance and Power Factors of Distorted Electrical Systems and Variable Speed Asynchronous Electric Drives" Electronics 10, no. 14: 1676. https://doi.org/10.3390/electronics10141676
APA StylePetrushyn, V., Horoshko, V., Plotkin, J., Almuratova, N., & Toigozhinova, Z. (2021). Power Balance and Power Factors of Distorted Electrical Systems and Variable Speed Asynchronous Electric Drives. Electronics, 10(14), 1676. https://doi.org/10.3390/electronics10141676