1. Introduction
Passive Coherent Location radars, shortly called “passive radars”, are highly advanced radiolocation systems dedicated for the detection of ground and air moving targets. The main idea of such a radar is based on the reception of a group of signals emitted by the other transmitters called transmitters of opportunity. These signals may be of different kind, e.g., frequency-modulated (FM) radio, Digital Video Broadcasting (DVB-T) or The Global System for Mobile Communications (GSM) [
1].
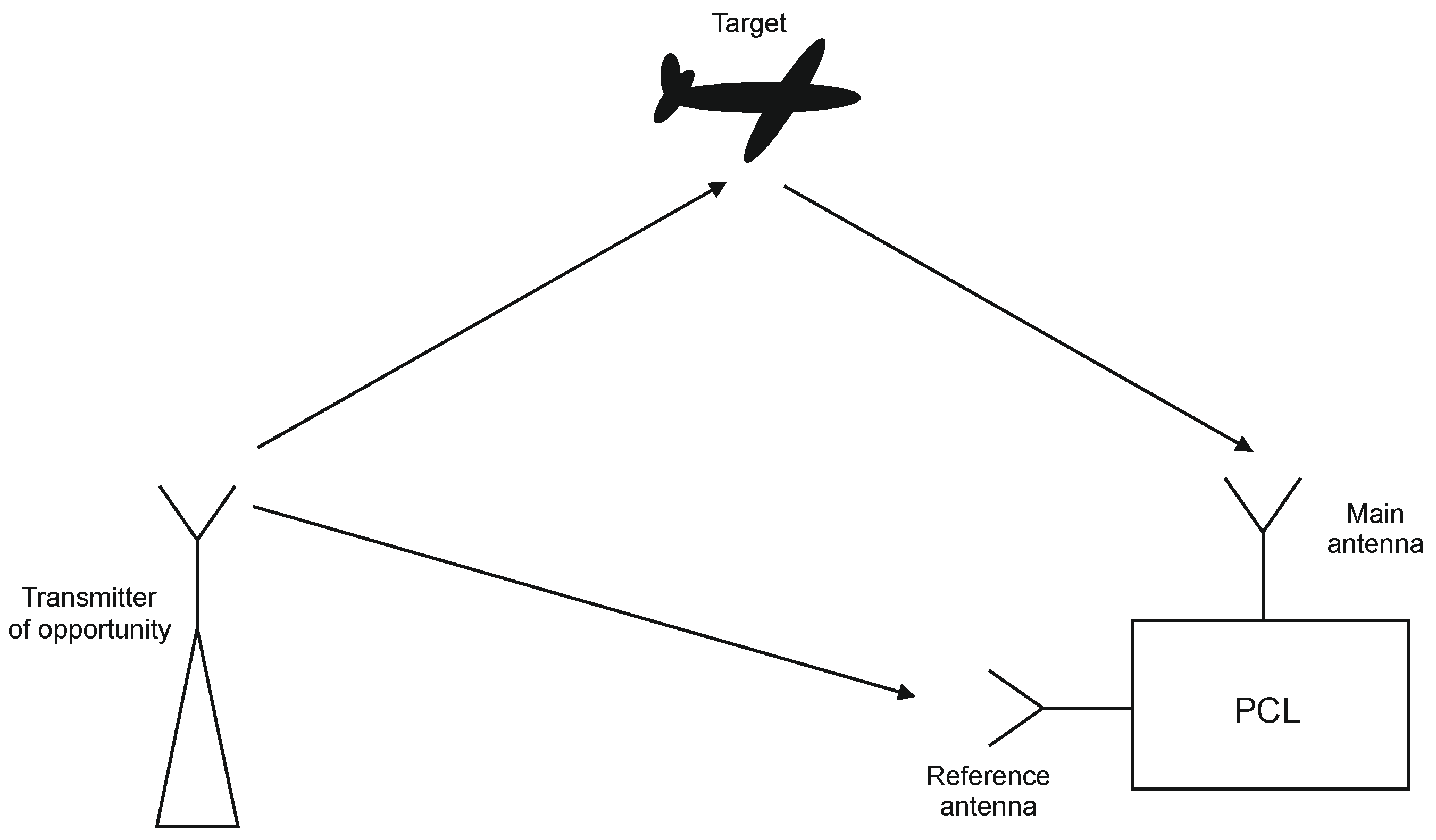
The PCL system receives the opportunity signal in two ways: first is the signal directly from a transmitter, second is the signal reflected from an object of interest (target), as shown in
Figure 1. Then, the comparison and specialized analysis of these two signals as a result allows the detection of an object’s presence and its distance and velocity [
2,
3,
4]. The main part of this receiver is an antenna and a low-noise amplifier. This kind of system does not emit a signal to illuminate a target. It relies exclusively on the signals emitted from the transmitters of opportunity. Therefore, theoretically, such a system is completely undetectable due to lack of any EM emission. This feature is frequently underlined by specialists, that the passive radar is regarded as impossible to be located [
5]. Moreover, this feature causes that a passive radar cannot be attacked by an anti-radar missile. It seems to be the perfect sensor in the meaning of tactical application: inexpensive, easy to deploy, and undetectable for other sensors [
6]. The advanced methods of signal processing developed nowadays allow to perform a higher-order analysis, e.g., target tracking or synthetic aperture imaging [
7,
8] with such a system. There are also concepts and experiments when a PCL uses other non-cooperating active radars as the illuminators of opportunity [
9].
That is why there is an urgent need to develop a new kind of method of detection and localization of hidden PCL systems. In the paper, they are further called as Counter-PCL techniques, shortly C-PCL.
There is a lack of open literature concerning detection of PCLs. The topic of counter-measures against PCLs has become more popular recently. There is the approach of passive radar jamming, with the use of various active methods [
10,
11,
12].
In the following analysis, further in the paper, it is assumed that a PCL system emits no signals; moreover, it is perfectly shielded in the EMC meaning. Then, the only way to penetrate the system hardware is through the receiving antenna.
The paper concerns the analysis of a method of the remote detection of a PCL system. This method assumes the use of sounding signals emitted towards a PCL. The detection process relies on the reception of signals emitted back from a PCL input antenna, which are generated due to nonlinear effects in the PCL front-end caused by the excitation with the C-PCL sounding signals.
The aim of the work is to analyze and validate the proposed method by theoretical calculations of the requirements for a system structure and measurements of the low-noise amplifier nonlinear response.
In further sections of the paper, a basic idea of the method is presented. The issues related to the practical implementation are discussed. The input intermodulation effect is measured with the use of an example of a low-noise amplifier (LNA) and a special measurement setup. The intermodulation generation efficiency is derived from the measurement results.
With the use of measured results, the analytical calculations of a model of the C-PCL system are performed. The relationships of transmitted power, detection range and antenna gains are calculated and presented. The possibility of the remote detection of a PCL system is evaluated.
2. Method of Detection
Because of the fact that a PCL system emits no signal, it is assumed that the C-PCL method bases on using of special sounding signal in order of search for a PCL. The PCL system may be contained in a shielded case; therefore, the only way a signal may penetrate the system is through the antenna aperture (receiver’s input).
The PCL antenna (set of antennas) is matched to receive a specialized frequency band. Most frequently it is the DVB-T band, Ultra High Frequency (UHF)/Very High Frequency (VHF) (for FM radio) or GSM. The basis of the proposed method is the detection of the nonlinear circuit, which is an LNA receiver.
For the purpose of further analysis, it is assumed that the PCL system is dedicated to receive the DVB-T signals in a broad band.
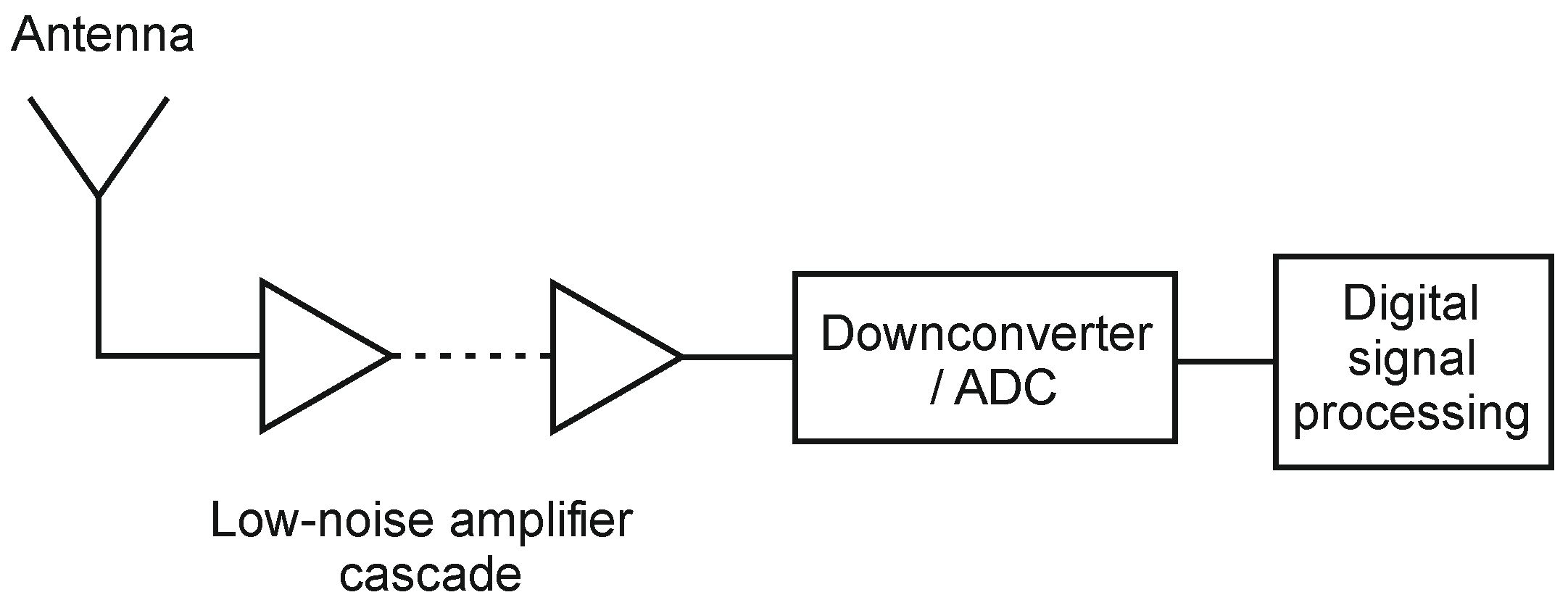
The PCL receiver may be presented in a general form as an antenna followed by a low-noise amplifier stage and further common amplifying stages. This receiving path ends with a downconverter or direct analog-to-digital converter (ADC) circuitry (
Figure 2). Because of the inherent one-direction characteristic of an amplifier, it may be assumed that for the purposes of PCL detection only the first stage of LNA may be exploited.
The issue now is simplified to the case of a wideband antenna followed by an LNA, i.e., a low-noise transistor at the first stage of a low-noise amplifying cascade, as presented in
Figure 3.
It was assumed that the receiver antenna is wideband and the passive system bandwidth covers a number of telecommunication channels, e.g., DVB-T broadcast band from 170 to 860 MHz. Any signal of frequency within the PCL input band may be received and enters through the antenna into an LNA circuit. A signal of frequency out of this band cannot be received and cannot penetrate a PCL structure by other means, e.g., imperfect shielding of the hardware housing. Therefore, the only way to excite the PCL front-end by a sounding signal is to use an intentional signal at a frequency within the PCL working band.
However, the use of a dedicated sounding signal of a frequency from the PCL band means that this signal is received and there is no signal coming back from the PCL. The only way to obtain a kind of useful response in order to detect the PCL presence is to use a harmonic (nonlinear) radar approach [
13,
14,
15].
Theoretically, it may be possible to obtain the harmonic response of an LNA by transmitting the sounding signal of a given frequency f0 and measuring the response signal at 2f0 or 3f0 frequencies. This approach presents a serious drawback. Successful implementation of this scheme requires that the second or third harmonic of the sounding signal falls within the PCL receiver’s working band. For narrowband PCLs, this may be not fulfilled.
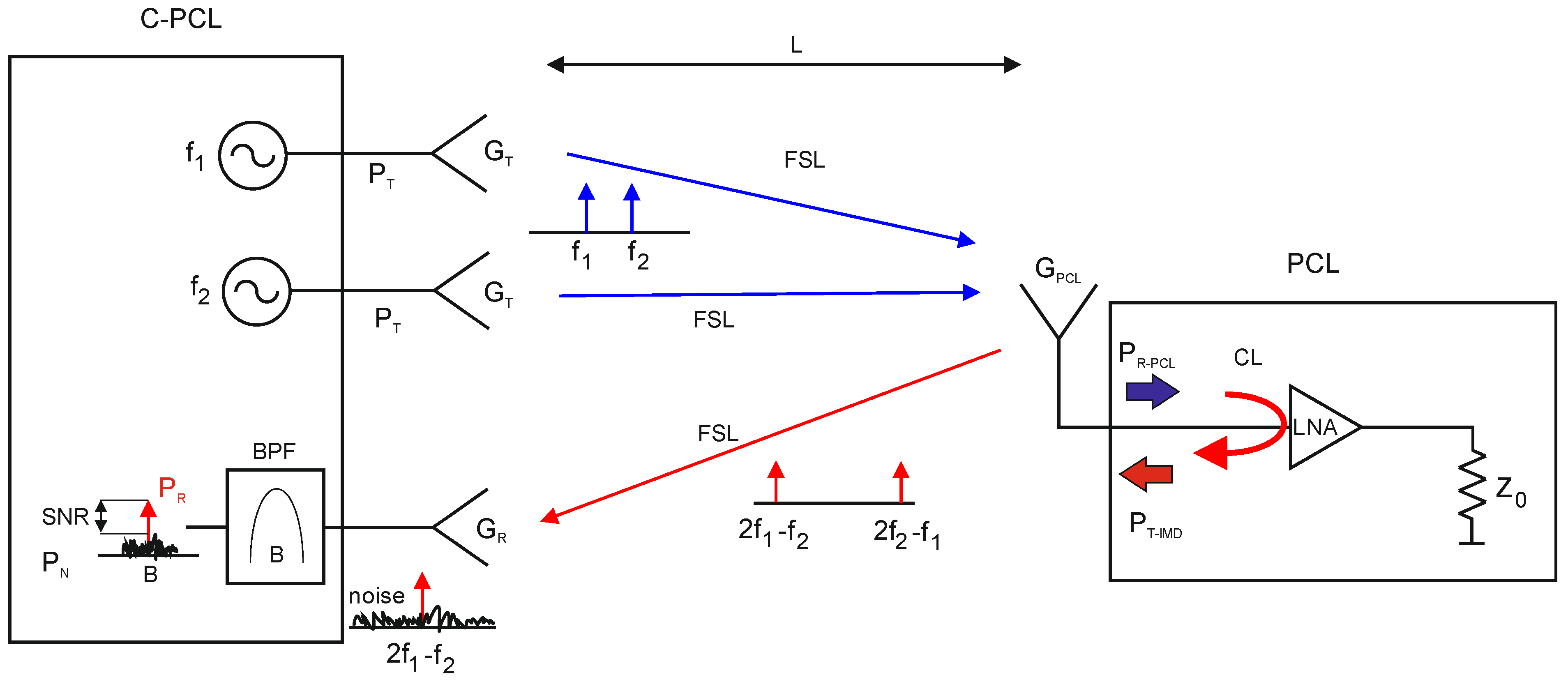
Taking the above into consideration, the authors proposed here to apply the intermodulation approach. Then, the C-PCL system emits two sounding signals at frequencies f1 and f2 and receives the third-order nonlinear response at frequencies 2f2 − f1 or/and 2f1 − f2. Such signals are further referred to as an intermodulation (IMD). The assumption is that the frequencies f1 and f2 are closely spaced in order to ensure that both of them fit the PCL’s input band. Additionally, the resulting intermodulation signals frequencies appear close to f1 and f2 and, therefore, also fit inside the PCL input band.
One may consider the use of second-order nonlinearity because of the fact that the transistor inside an LNA presents both—odd and even kinds of nonlinearity. Although the second order nonlinearity exhibits a higher frequency conversion efficiency, the frequency components in the resulting spectrum are difficult to exploit in the case of a harmonic sensor. For one-tone excitation, the only useful signal is the second harmonic. It can be used as the response to a sounding signal only when the PCL input band is wide enough to cover frequencies of both the sounding signal and its second harmonic. A similar situation takes place when two-tone excitation is chosen. The only useful signal of the second-order is the summary sideband, i.e., f1 + f2, so the same PCL band restrictions are present.
The main issue in this approach is the question of IMD generation at the input side of the LNA amplifier. The rise of an IMD product at the output of an amplifier in response to the two-tone excitation at the input is known and deeply described in the literature. There is a number of widely used parameters dedicated to describe this phenomenon, especially in telecommunication. Examples can be named as intercept point IP2, intercept point IP3, spurious-free dynamic range (SFDR) and spectral regrowth. However, all of these common parameters are dedicated to the characterization of nonlinear products in the signal spectrum at the output of the LNA.
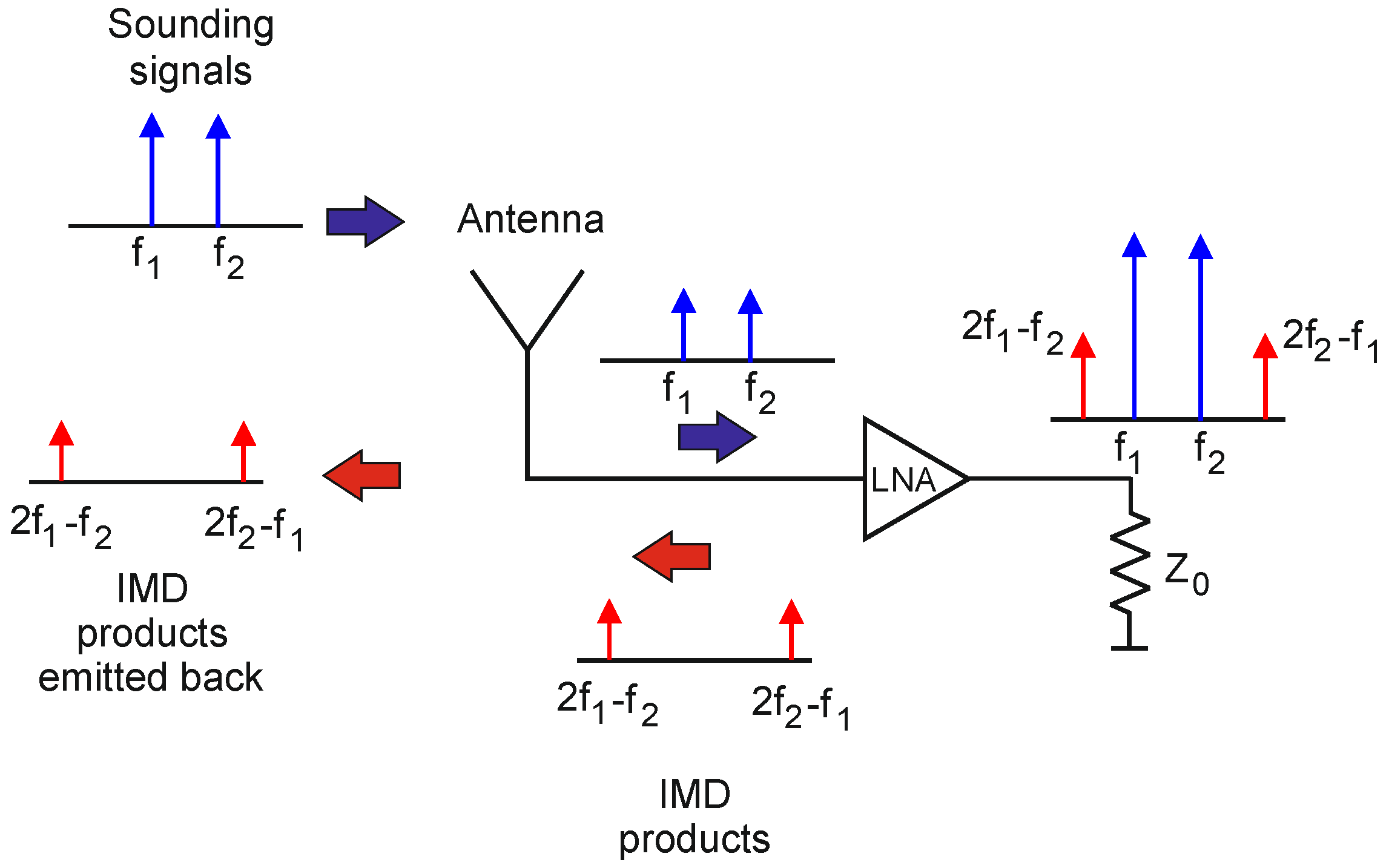
In the case of the C-PCL system, according to the proposed scheme, the key factor is to obtain the IMD products arising at the input side of the amplifier. It means that the input port, i.e., the gate–source junction in the case of field-effect transistor (FET) devices, is the origin of the IMD generation. Then, the whole C-PCL system relies on the following mechanism (depicted in
Figure 4):
- -
Reception of the set of sounding signals (preferably two-tone, f1 and f2 with equal powers) by the PCL input antenna;
- -
Set of sounding signals reach the LNA input;
- -
LNA is excited by sounding signals and produces IMD spectral components;
- -
IMD signals are emitted back through the PCL input antenna.
Efficiency of the proposed method relies on the power of IMD products which are emitted back from the PCL front-end. This issue was verified experimentally and is shown in the further sections of the paper.
3. Design Considerations of C-PCL System
For a real-world situation, in a remotely located C-PCL system, three key issues are important:
- -
Power of transmitted sounding signals versus their power level at the PCL antenna aperture (i.e., radio link loss at the distance from the C-PCL to the PCL);
- -
Frequency conversion efficiency (IMD generation) of the low-noise transistor related to its input;
- -
Power of the IMD products emitted back by the PCL antenna and received by the C-PCL antenna (i.e., radio link loss at the distance from the PCL to the C-PCL).
The first issue listed above is related to the design and calculation of the transmitted power and antenna gain for the C-PCL transmitter.
The second issue is related to the nonlinear effect in a low-noise transistor during the two-tone excitation at enough input power. In a real case, there are external signals that are continuously received by the LNA which are emitted by transmitters of opportunity and are further processed in the PCL circuitry. When sounding signals appear at the input of a PCL receiver, multi-tone excitation occurs and preferably the sounding tones’ power should be dominant. The efficiency of IMD generation is power-dependent. That is why the power of the sounding signals entering the LNA input is so important. The type of transistor in a real situation is unknown; therefore, the only way to ensure that the IMD are to be generated is to emit an adequate, previously predicted, amount of power.
The third issue is related to the design and calculation of reverse radio link efficiency. The PCL antenna serves now as a transmitting antenna and the only way to have a dimension of freedom in the C-PCL design is to assume that there is another receiving antenna matched to receive IMD frequencies. The gain of that antenna poses an additional variable of the considered design.
Yet another issue is to ensure that the frequency of transmitted sounding signals corresponds to the input band of a PCL that is planned to be detected. In the case of a lack of preliminary knowledge about the type of PCL, the solution is to use frequency-swept sounding signals. However, this technique may require a wider bandwidth of the receiver, which results in more noise power received.
The design and simulation of the C-PCL performance gives as a result the requirements for the transmitted power, antenna gains and distance of detection of a PCL.
The analysis of the sounding signals power and antenna gains may be performed only after gaining the knowledge of the IMD generation efficiency.
This issue was verified experimentally in this work with the use of a dedicated measurement setup.
4. Results
4.1. Measurements of the Input-Referred Intermodulation Effect in a Solid-State Amplifier
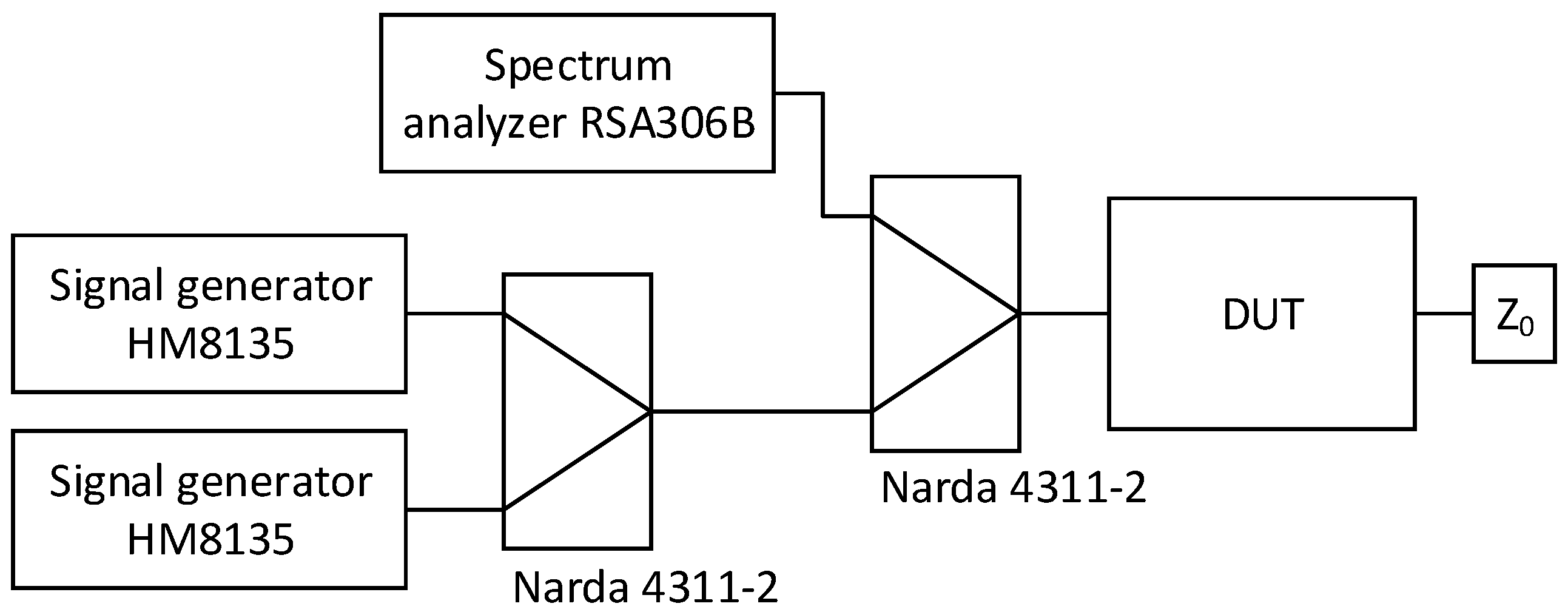
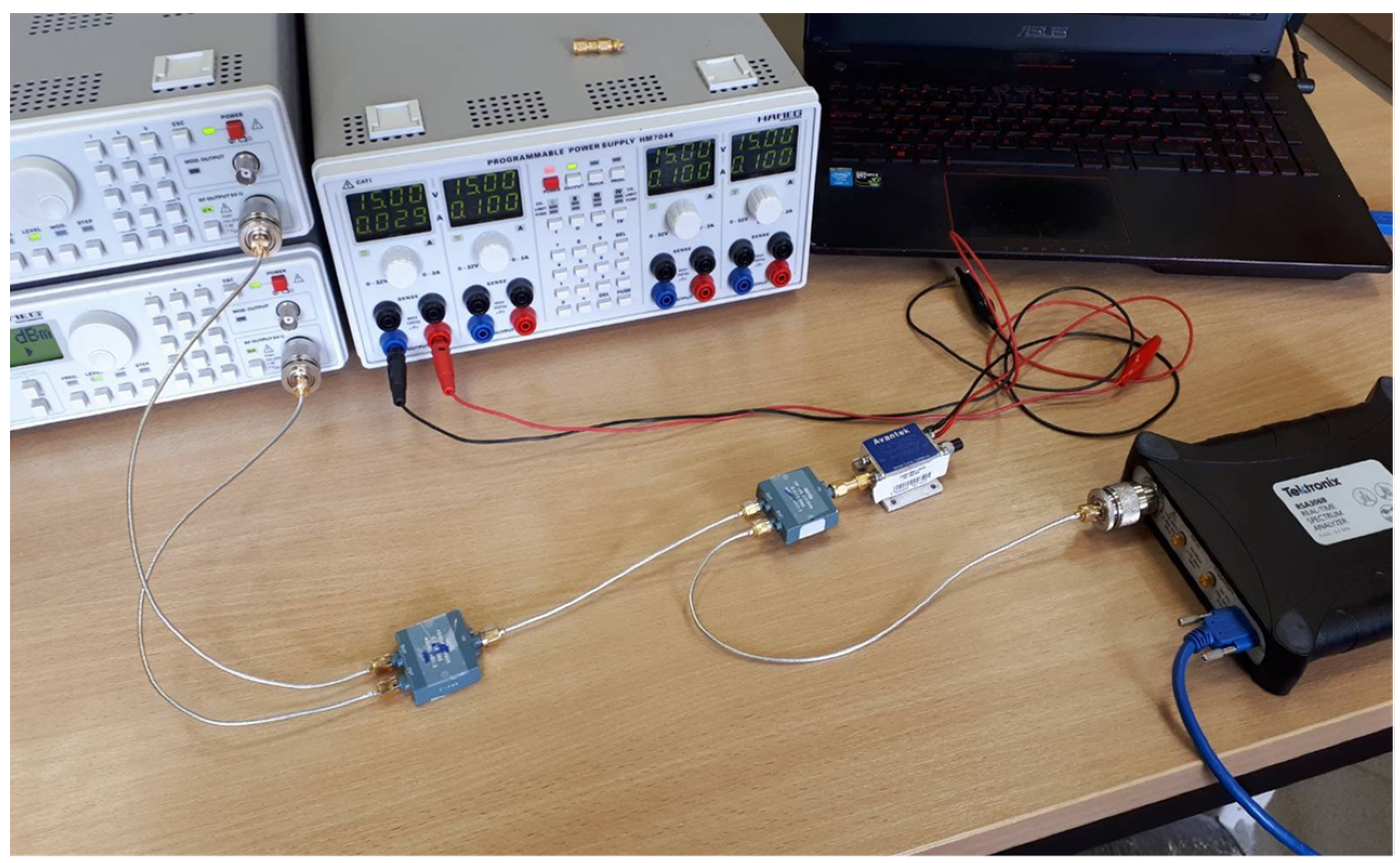
In order to experimentally examine the possibility of IMD generation at the input of an amplifier and measure the power of adequate frequency components, the following test-bed was prepared (
Figure 5 and
Figure 6). The setup consists of two signal generators, two 3dB power dividers—which work as combiners—and a spectrum analyzer.
The measurements were conducted using two generators. The output power of the generators was changed simultaneously (two-tone excitation). The power spectrum of the signals returning from the input port of the LNA was observed at one of the ports of a power divider. The power losses introduced by power dividers during power dividing and summing were measured and taken into account in the final processing of the results.
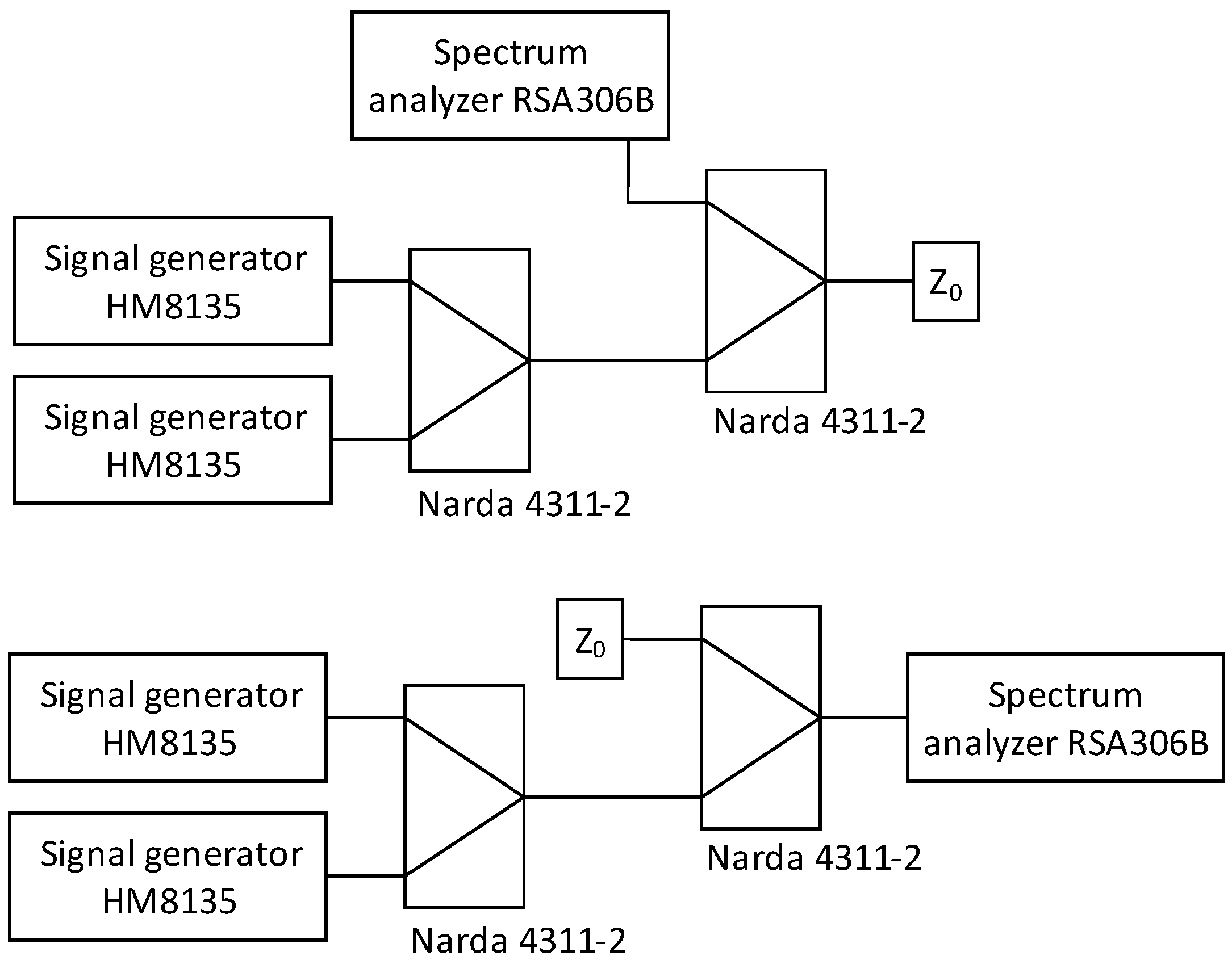
The test-bed was calibrated, i.e., there were two configurations (
Figure 7) measured in order to find out the attenuation in the signal path, power leakage between ports of the power dividers and spectrum analyzer spurious and nonlinear responses.
It was found that the signals with a power equal or less than –80 dBm were covered and influenced by spectrum analyzer-induced spurious signals. The analyzer RSA306B had its spurious response set to a level of –80 dBm, according to its datasheet. In general, the intermodulation products (frequency components) may have very low power levels (i.e., lower than –80 dBm) depending on the excitation power, which in a real dedicated receiver design may be detected with the use of a narrow bandpass filter.
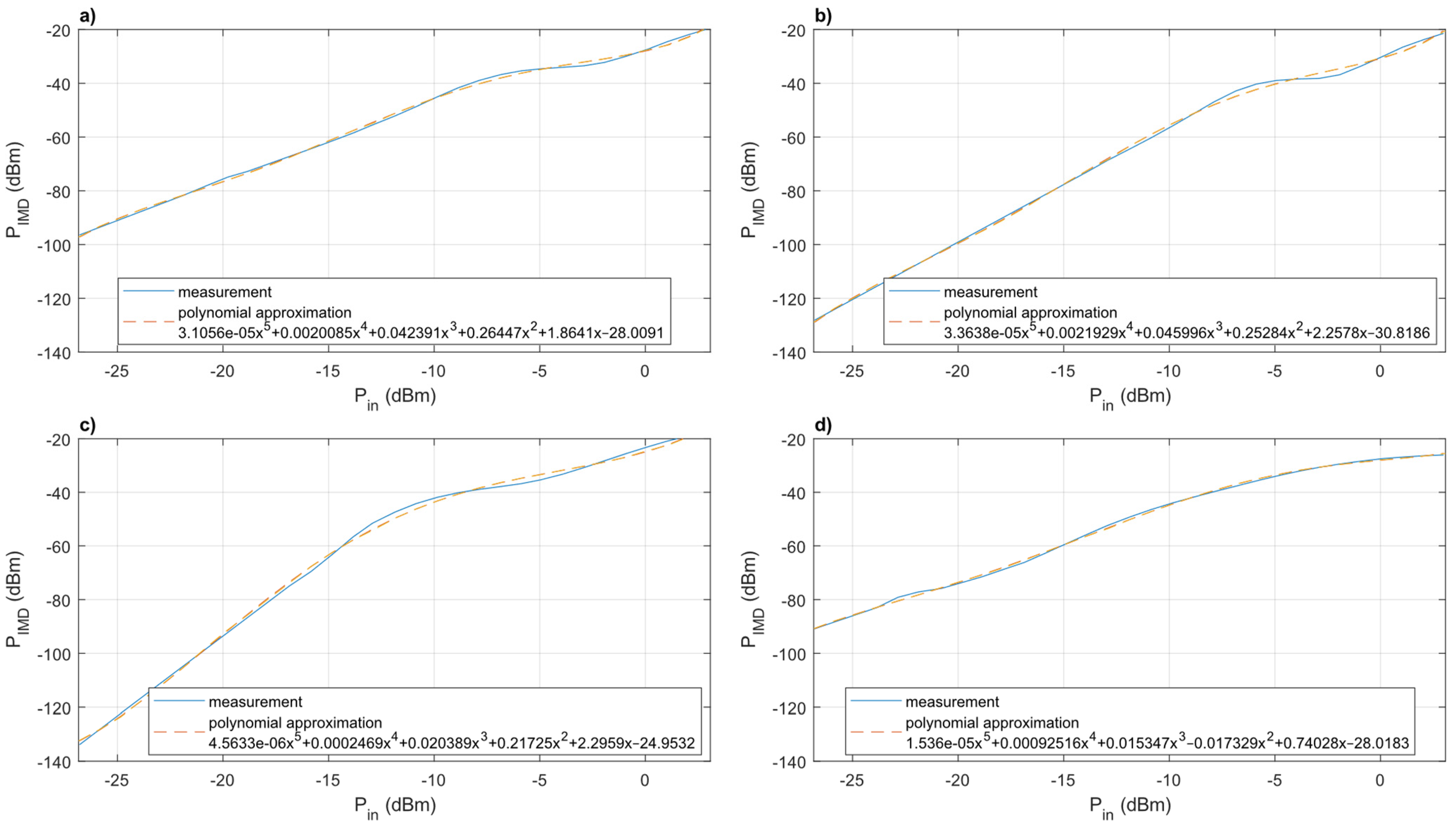
The parts of characteristics of IMD power versus input power above about –70 dBm is taken to make an analytical modeling. This model was used to predict IMD power below a level of –70 dBm for purposes of further calculations of the C-PCL system performance. The prediction is based on an extrapolation with the use of the existing slope (theoretically 3:1) of the device under test, which results from the fact that the IMD is a third-order product and its power is with a cubic relation to the exciting signal power. For the following analysis, the IMD product at 2f1 − f2 was chosen.
The measurements were performed with the use of the following devices under test (DUT):
LNA amplifier Avantek SC82-2342M;
Amplifier Crystek CRBAMP-100-6000;
Amplifier Mini-Circuits ERA-3;
DVB-T receiver and tuner in the form of a USB dongle, model R820T.
The set of chosen devices corresponds to typical semiconductor amplifiers used in the microwave area. Additionally, a ready-to-use miniaturized full DVB-T receiver was used as a representative of an integrated device.
The amplifiers that we tested were chosen in order to have a cross-section of typical devices that are used in the military or dedicated designs, i.e.,:
- -
Packaged amplifiers from the market used in military designs;
- -
Mini-Circuits SMD amplifier commonly used in the microwave engineering world;
- -
A case of commonly available integrated receiver as an example of a ready-to-use device that may be used in low-cost solutions.
The measurements were conducted for frequencies of sounding signals equal to f1 = 749 MHz and f2 = 754 MHz. These values fit the DVB-T band and may serve as an example for illustration purposes and were chosen as the trade-off between the available bandwidth of the power dividers and amplifiers used for the experiment.
The selected results of measurements are shown in
Figure 8 and
Table 1,
Table 2,
Table 3 and
Table 4. These values of power are related to the DUT’s input, i.e., the losses of power splitters are taken into account. The conversion losses (CL) calculated for each of the cases are defined as:
4.2. Calculation of C-PCL System Performance
For purposes of the calculation of the C-PCL system performance and derivation of the requirements for system components, the following C-PCL structure was assumed (
Figure 9). The system consists of two separate transmitters of two sounding signals at f
1 and f
2 of equal power P
T, transmitting antenna and receiving antenna. The antennas are described by the gain parameter, G
T for transmitting one and G
R for the receiving one. The transmitting antenna is the part of the C-PCL system and the value of the gain G
T may be high due to a dedicated design and high directivity. The receiving antenna for the sounding signals is the PCL radar own receiving antenna. The gain G
PCL of this antenna depends on the design of the PCL; however, in real-world scenarios there are two solutions used most frequently: first is a conformal array of half-wave dipole antennas (usually eight dipoles) with a digital synthesis of the receiving beam, second is the log-periodic antenna with a gain equal to about 8 dBi used in the additional reference receiver in the PCL structure [
2,
16,
17]. In some solutions, there are linear arrays of unit antennas [
18]. In the case of the circular array of dipoles and digital beamforming of the baseband signals in the radar processing, each dipole followed by a LNA amplifier may be treated as a separate PCL receiver. Then, the process of sounding signal reception may be described by a single dipole directive gain. Further, the IMD generation may be analyzed as for a single transistor. The reverse situation becomes more complex. Each of the LNAs in every sub-receiver in the array produce their own IMD signals and emit them back through the dipole. Because of the fact that the dipoles are spatially distributed in a circular way, the incoming sounding signals arrive with different phase shifts depending on the array dimension and the value of sounding frequencies. Then, the IMD products are generated in every LNA and they have different relative phase shifts due to the frequency conversion of phase-shifted sounding signals. Moreover, when the IMDs are emitted back from the dipoles, they are additionally phase-shifted between each other due to the spatial distribution of the dipoles. Therefore, the equivalent transmitting beam of the dipole array with respect to the IMD wave has a directivity depending on the IMD frequency and the direction of the sounding signals arrival. Thus, it is difficult to evaluate the PCL antenna directive gain value by a simple formula to use in a radio link range equation. A further analysis of predefined cases should be performed, where the dimensions of the PCL antenna array, range of frequencies and different angles of arrival of sounding signal are assumed. This analysis should be conducted in order to design a dedicated C-PCL system based on real tactical requirements. For the purposes of further consideration, in this paper the PCL transmitting antenna gain for IMD was assumed to be equal to 2.14 dB – in the worst case with only one dipole and about 5 dB – in the case of a cumulative gain of the array. The reference channel antenna in the PCL, used to direct receive the opportunity signal, is usually of log-periodic or Yagi-Uda type and may be described by a gain equal to about 8 dB. The C-PCL system may detect the reference channel receiver or the receivers in the main antenna array.
The detection distance is denoted as L. The PCL system, taken for further calculations, had one equivalent receiving antenna with a gain GPCL-R for signals reception and GPCL-T for transmission of IMD products. For purposes of simplicity, it was assumed that the sounding frequencies and IMD products are so closely spaced that the radio link loss due to frequency had approximately the same value. The bandwidth of the IMD receiver is denoted as B.
The analysis of the C-PCL performance uses formulas for radio link losses; however, here it was rearranged with respect to the received IMD signal power in the C-PCL receiver (see
Figure 8).
The bandwidth of the IMD receiver is denoted as B, and it allows the noise power to be calculated.
Then, one may define the signal-to-noise ratio (SNR) that is sufficient to decide that the IMD signal (with the power P
R) is detected with a sufficiently high probability. In this calculation, the SNR was assumed to be equal to 10 dB.
The power of the IMD signal equal to P
R appears at the input of the C-PCL receiver, after transmission through a radio link from the PCL antenna. Therefore, one may write:
where:
- -
PT-IMD—power of the IMD product generated at the amplifier’s input;
- -
LLUP—link loss for uplink, i.e., from the PCL to the C-PCL.
The uplink loss (i.e., from the C-PCL transmitter to the PCL receiver) was calculated according to the known formula:
where:
- -
GT-PCL is the PCL antenna gain when the transmission of the IMD signals is considered;
- -
GR is the C-PCL receiver antenna gain;
- -
FSL is a free-space loss defined as:
The power of the IMD products may be derived from:
where P
R-PCL denotes power of the sounding signals received by the PCL. The process of the IMD generation in the PCL low-noise amplifier is described by the frequency conversion loss (CL). This value was calculated from the measurement results. Then, the sounding power at the LNA input is given by:
The downlink loss (i.e., from the C-PCL transmitting antenna to the PCL receiver) was calculated as in the case of uplink:
where G
R-PCL is the PCL antenna gain for the reception of sounding signals.
The methodology presented above describes the relation between the sounding signals power GT and the detection distance L for a given C-PCL receiver bandwidth B and SNR. The other variables are the gains of antennas and IMD generation efficiency (CL, conversion loss).
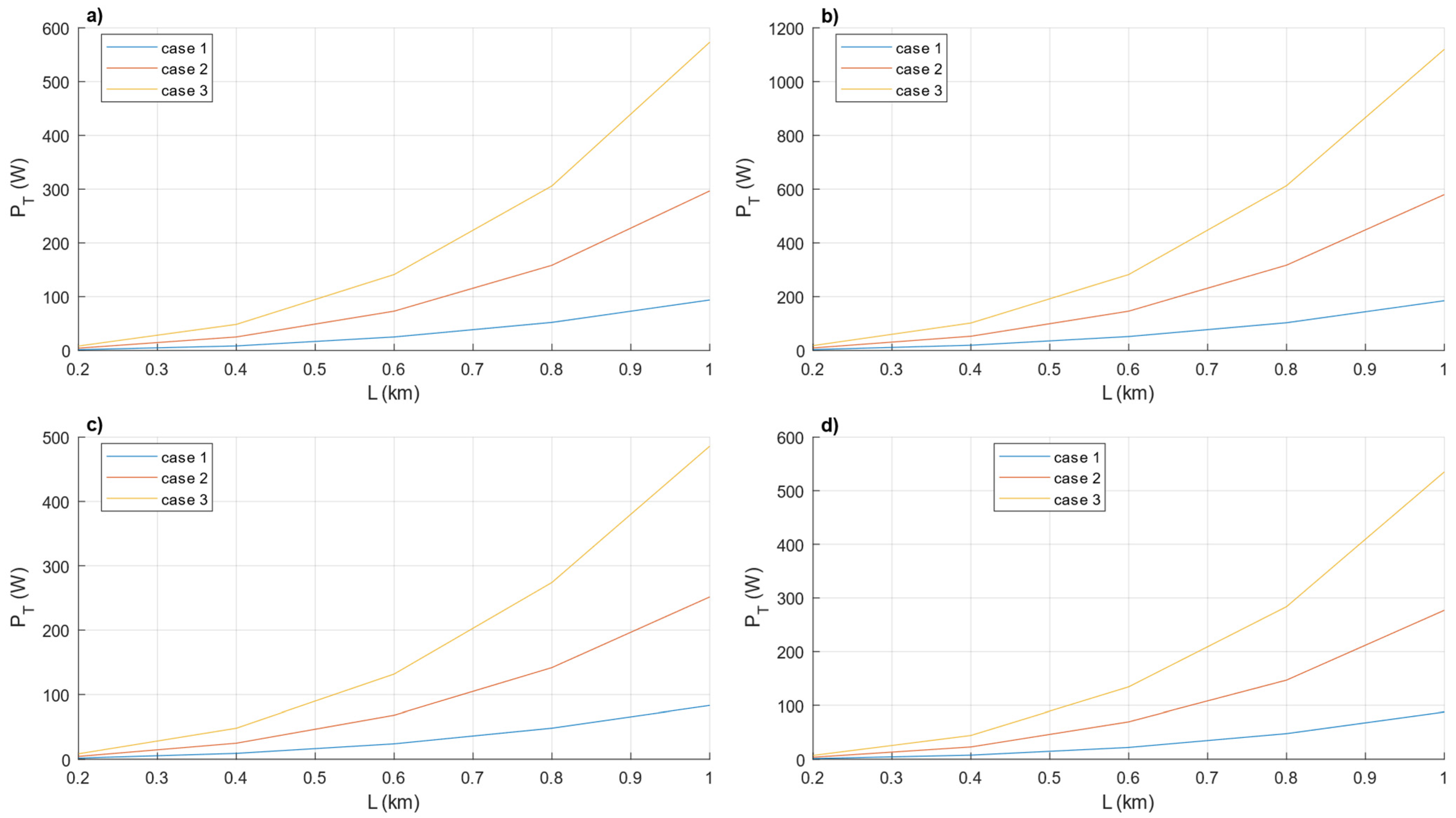
In order to evaluate the C-PCL system performance, three main cases were assumed:
Case 1: Illumination of the PCL reference antenna, GPCL-R = GPCL-T = 8dB;
Case 2: Illumination of the PCL main antenna—array of dipoles, reasonably best case, GPCL-R = 2.14 dB, GPCL-T = 5dB;
Case 3: Illumination of the PCL main antenna—array of dipoles, worst case, GPCL-R = 2.14 dB, GPCL-T = 2.14dB;
For all cases above it was assumed:
- -
The IMD receiver bandwidth B equal to 100 kHz;
- -
For simplicity, the absence of other background signals (e.g., DVB-T channels) and a minimal required signal-to-noise offset of 10 dB defined for the C-PCL receiver;
- -
The C-PCL transmitting and receiving antenna gains equal to 20 dB;
- -
Frequency for the calculation of free-space losses for down-link and up-link is equal to 750 MHz (value equivalent for f1, f2 and fIMD, one common value in order to have equal-power two-tone excitation of the LNA);
- -
The maximal analyzed detection range is set to 1 km, but this should not be considered as a limit. The value is chosen for the purposes of convenient comparison between cases and nonlinear devices.
An example of the calculation performed for several conditions and scenarios is shown in
Table 5,
Table 6 and
Table 7. The C-PCL system performance was presented in the form of characteristics: detection range versus transmitted power, in
Figure 10.
To summarize the results, for three of the four DUTs examined, for the best case, the sounding power required to obtain the maximum detection range of 1 km was equal to about 100 W for f1 and f2 equal to about 750 MHz.
5. Discussion
The detection range may be extended when the sounding frequencies are lower, i.e., closer to the lower edge of the DVB-T band as the free-space losses decrease.
The real design of a dedicated C-PCL system should contain an analysis of real background noise, including a distributed power density from DVB-T channels, depending on the DVB-T transmitter’s physical localization in a given area. The presence of such background signals can lower the SNR value and deteriorate the C-PCL detection range. It can be overcome with digital signal processing, meanings, i.e., by the design of a sounding waveform with a modulation orthogonal to DVB-T’s one and by applying a matched detection in the C-PCL receiver. The digital processing gain should compensate a decrease in the SNR value caused by DVB-T transmitters. On the other hand, the use of wider band signals requires a wider band of the C-PCL receiver which allows more noise power to enter into the signal processing. Therefore, the opposite method is to use a bandpass filter with as narrow a transmission band as possible. The third possible approach is to use a kind of adaptive signal cancelling designed for DVB-T background signals entering into a C-PCL receiver.
Taking into account thermal noise only, with the assumption of a 10dB signal-to-noise ratio in the C-PCL receiver, the possibility of the application of such a system was shown. Although the SNR value was chosen conveniently in terms of detectability, a reverse propagation analysis proved that this condition can be met with a reasonable magnitude of C-PCL transmitter power. What is more, the C-PCL system antennas may be chosen or optimized for higher values of gain than modelled. In the best of cases considered in the analysis, using the conversion losses measured for typical amplifiers, the detection range of 1 km is reachable with the use of a sounding power of about 100 W at 750 MHz. The harmonic radar approach is known and used in order to detect objects containing electronic circuits. However, the most developed topic is the detection of specially prepared circuits, called nonlinear transponders [
19]. The design of such a transponder covers the design of antennas for sounding and harmonic signals, and optimized and matched nonlinear circuits, most frequently consisting of a Schottky diode. In that case the parameters of a nonlinear circuit are known and the transponder antennas and operation frequency are to be optimized. Moreover, commonly the one harmonic is chosen, e.g., the second, and the remote exciter, i.e., a sounding and reading device, and the sounding signal form may be easily optimized. Such transponder circuits with appropriate interrogating circuits are used, for example, to track insects [
20]. In the case of detection of hidden PCLs, there is no knowledge a priori about the parameters of the “transponder”. It should be assumed “the worst case”, i.e., the lack of knowledge about the exact parameters of the antennas and LNA in PCL. That is why the authors performed an analysis that covers a range of possible values of these parameters. Some of the initial guesses concerning the PCL structure resulted from the literature survey and knowledge of engineering trends. This work concerns the real case of a radar that is commonly regarded to be completely undetectable. Several devices, that may be used as an LNA for PCL, were tested in order to gain knowledge about typical IMD behavior. The real-world laboratory tests of these devices allowed the analysis to be performed and a C-PCL system performance to be estimated.
Further works may concern wideband and frequency-modulated sounding signals in order to suppress the influence of surrounding opportunity signals or obtain matched detection and signal compression. Another issue is the prediction of frequency- and direction-dependent variation of the PCL antenna directive gain when it serves as the transmitter of IMD signals. In the case of a C-PCL transmitter with a wideband sounding signal, e.g., Linear Frequency Modulation, when a kind of frequency-dependent array is used in the PCL, another additional issue arises. This is a possible change of the PCL’s responding beam angle during the C-PCL frequency sweep. For the quasi-constant position of the C-PCL (during the sweep time) its receiver receives an amplitude and phase modulation of the received signal during the sweep time. This modulation is periodical and synchronized with the frequency sweep. Then, one of the possible solutions to overcome this is a kind of receiving channel equalization. It is based on the synchronic modulation of the receiver gain and additional phase shifter in order to obtain a constant received power and minimalized phase changes.
A real design of a C-PCL system should be started from the tactical point of view. The subsequent analysis steps should cover the following issues, assuming a military mission in an unknown area:
- -
Size of area dedicated to be searched through, and the terrain profile;
- -
Location of known radar stations—based on intelligence data or direction finding devices;
- -
Prediction of possible location of PCL radars, assuming that they may serve as so called “gap fillers”—additional radars used to maintain full coverage of surveillance area;
- -
Location of DVB-T/FM/GSM transmitters and their power.
The information above allows the prediction of the background signals power to be performed. These data are very important in estimating the C-PCL performance. In order to merge and use the information above, one may develop a computer simulation engine which would allow the various scenarios to be analyzed. This kind of simulator would help in the process of C-PCL design. The authors plan further research in this direction.
The practical implementation of this method of PCL detection may rely on the use of Unmanned Aerial Vehicles (drones) with an adaptively defined search trajectory. One may further analyze and optimize the configuration of a distributed C-PCL system with the use of several UAVs. The sounding signal transmitters may be placed on two drones separately. Moreover, the IMD receiver may be placed on another separate drone or even multiplied and placed on several drones. The methodology of scanning the given area may be optimized according to various criteria, e.g., power consumption, investigation time of an area, accuracy of localization of the PCL system, or maximization of the detection distance. The distributed “smart” C-PCL system based on a number of drones with sounding transmitters and IMD receivers may overcome issues related to optimal interception of IMD signals emitted by the circular antenna array of PCL and, moreover, allows a fast PCL localization to be done.
6. Conclusions
The concept was presented. The measurements verifying IMD generation at the input of several transistor amplifiers (including a real DVB-T receiver) were conducted. The value of frequency conversion efficiency referred to input varied with input power. However, the most important conclusion is that the power level of the IMD products, referring to the amplifier’s input, reached values sufficient to be received in the case of back-radiation from a PCL. Acquired data allowed the calculation and simulation of a C-PCL system to be performed. Assuming typical real antenna parameters, the detection range of a PCL system versus the transmitted power was estimated. It was found out that it is possible to remotely induce the intermodulation distortions in the input part of a low-noise amplifier. These IMD products may be received with the use of a dedicated narrowband receiver. The bandwidth of this receiver may be very narrow in the case of stable CW sounding frequencies; however, the possible Doppler shift of IMD frequencies (when the C-PCL system is installed on a drone) should be considered.
The detection range depends mainly on the level of the sounding signals’ transmitted power. There is also obvious influence of antenna gains, especially in the case of the PCL receiving antenna, where a circular array of dipoles may be used. The equivalent transmitting beam of the PCL dipole array with respect to the generated IMD wave has directivity, which depends on the IMD frequency and the sounding signals’ angle of arrival. This is the reason why the additional link-loss depending on situational configuration should be considered. In the case when a PCL system contains separate reference antenna, its gain is typically high, which improves the PCL detectability.
The main conclusion is that such an advanced “silent” system as a PCL may be tracked and detected with the use of novel and specialized methods exploiting the knowledge from nonlinear circuit theory and methodology of UAV application, including artificial intelligence for mission planning and scanning scenario or a multistatic approach. The further conclusion is that the use of a nonlinear method of detection allows new solutions for an anti-radar missile to be developed.
The topic of the real implementation of a C-PCL system should also contain an analysis of possible counter-action from further improved versions of PCL systems. For example, a countermeasure in the form of detecting the sounding signals by a PCL and switching off the power supply of the system (going to standby mode) does not protect a PCL from being detected. Then, the bias point of LNA will be changed but the transistor still keeps its nonlinear behavior allowing it to be detected, likely giving a substantially lower power of IMD signals, but still with a non-zero value. The other possibility of countermeasure is to deploy a kind of decoy device that would mimic a real PCL system. These kinds of topics are under development and are out of the scope of this paper.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}