1. Introduction
Detecting and tracking moving targets’ locations, Doppler frequencies, and velocities based on the target-skin-return is the main function of modern electromagnetic (EM) based tracking and measurement systems, e.g., radars [
1]. Successful EM propagation and antenna array modeling for this detection and tracking process in software is important for the designing of such systems for radar electronic warfare studies. In this paper, we present the use of numerical models for analyzing the EM skin return of moving targets in the presence of stationary clutters and receiver noise with Simulink software. The main models include the “point-reflector” target simulation model, the simplified radio frequency (RF) frontend, and the digital beamforming (DBF) receiver. The “point-reflector” target simulation model simulates a target at certain three-dimensional (3D) coordinates using a radar cross section (RCS) number, the 3D coordinates, arbitrary 3D velocities, and arbitrary 3D accelerations as inputs to this model. The simplified RF frontend models transmit-to-receive (TX-to-RX) coupling (or leakage) and the additive white Gaussian noise (AWGN). The features of the paper are to tie the aspects of antenna array and EM wave multi-skin-returns (target and clutter) modeling and simulation (M&S) with the aspects of algorithm and system architecture. It applies the DBF antenna array theory and 3-domain (time-, frequency-, and Doppler-domain) based signal processing theory to the system under design. The numerical models presented in this paper are highly modular. The DBF receiver model is highly parallel by pipeline processing. All the models can be implemented in real time on digital hardware like field programmable gate array (FPGA) and application-specific integrated circuit (ASIC) for real time applications. In the introduction, we first review the recent frequency modulated continuous wave (FMCW) waveform related literature. Then we will address the main contributions of the paper from the modeling and simulation (M&S) aspects, and the FMCW radar algorithm and architecture aspects.
Triangular FMCW waveform [
2] is used in this paper as the signal to interrogate moving targets. FMCW waveform has high signal processing gain, due to the continuous transmission and the Fast Fourier Transform (FFT). Two different radio frequency (RF) architectures are available for FMCW systems, as discussed in [
3]. The first architecture (p. 9 of [
3]) generates a chirp signal in the digital domain for the transmitter and does de-chirping in the digital domain of the receiver. This architecture mixes the received RF waveform with the stable local oscillator signal (the frequency agile part), then mixes the output signal with the coherent oscillator signal (the fixed frequency part), and after that feeds the signal to analog to digital converters (ADCs) [
4], then finally, de-chirps the signal in the digital domain. The FMCW algorithm in this paper is based on this architecture. The second architecture (p. 12 of [
3]) is to mix the received RF waveform with the transmitted RF waveform, before ADC. This method does de-chirping operation in the RF analog domain. This is a popular architecture used in the automotive industry [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15] and the harbor surveillance application [
16]. In particular, the three-dimensional FFT algorithm per fast time, antenna, and slow time, is very popular for the automotive application in order to estimate the range, angle, and Doppler [
11].
From the M&S aspect, typical EM echo measurement system models only present the amplitude level details of the EM wave propagation and radar processing. It uses the radar range equation to calculate the receiver signal to noise ratio, and outputs the detection probability and false alarm probability as system outputs [
17]. It also relies on many assumptions made on the radar receiver processing and has very little flexibility. The other approach is to model the complex in-phase and quadrature (I/Q) signals in the radar processing chain. However, simulating the continuous electromagnetic (EM) wave scattering/reflection return (also called skin return) from the targets over the air and across the complex antenna system is often very challenging. Instead of simulating the EM wave interaction with the target using a time domain approach or a frequency domain approach [
18,
19,
20], we use the RCS-based method based on three assumptions. The first assumption assumes that the distance between the rigid body target and the radar is much larger than target size. The second assumption is that the target is at the far field region of the EM wave propagation. The last assumption is that the maximum difference of the distances between any points of the target to the radar is less than half of the product of the receiver sampling time resolution and the speed of light. With these assumptions, we can closely model the target as a moving “point” with 3D coordinates and certain 3D complex valued RCS patterns as a function of the angles in the spherical coordinates. A point target, which represents the “mass center” in the RCS measurement sense (not the physical mass centroid), moves based on its 3D velocity vector and its 3D acceleration vector, and rotates in pitch, roll, and yaw axes [
21].
If the radar waveform is band-limited, we can accurately recover the waveform after an arbitrary propagation time using an ideal delay filter based on an adequate number of the non-delayed digital samples [
22]. When a target is moving continuously, the coefficients of this ideal delay filter must be changed based on the changes of the EM wave round-trip propagation time. We can describe this continuous target movement using a time varying delay filter and a number of digital samples of the non-delayed waveform. This approach was first introduced in [
23].
From the algorithm and architecture aspects, the main novelty of this paper is to use a hybrid time-domain and frequency-domain signal processing architecture, which combines a time domain vector moving target indication (MTI) filter [
24,
25], a time domain vector direct current (DC) canceller, a frequency domain constant false alarm rate (CFAR) detector [
26] and a frequency domain mono-pulse angle tracker [
27,
28]. The advantages of this new hybrid architecture become obvious when the number of receive antennas is big and the FFT size is large, as in that case the implementation using per-antenna FFT [
11] can be dauntingly complex. In our design, we only use four FFTs per target tracker for a 4 × 4 element antenna array. Additionally, each target tracker can be time-multiplexed if properly configured by different targets. The implementation complexity of our approach has been much reduced.
The proposed architecture is a complete tracking and measurement system receiver design with DBF. The input to the system is the initial range, the initial angles in the spherical coordinate system, and the initial Doppler value of the moving target. Then the system does automatic tracking of the angles and calculation of the range and the Doppler. The tracking mechanism uses closed loop mono-pulse tracking, and is different from the open loop tracking while scan (TWS) mechanism [
1,
29,
30]. The MTI filter is a vector extension of the scalar MTI design used for the FMCW radar in [
24]. The CFAR detector is similar to the one used in [
26]. The mono-pulse tracking follows the previous work in [
28]. Compared with our prior work [
23], we use the triangular FMCW waveform instead of the sawtooth FMCW waveform, and use vector MTI filter for the clutter cancellation, and the CFAR detector for the target detection. We also present a range extrapolation scheme to extrapolate the range estimate based on the last known range and Doppler values when the target is at the “blind speed” of the vector MTI filter. Additionally, compared with [
23], the DC canceller is placed before the beamforming operation to completely cancel the DC and avoid the spectrum sidelobes of the DC caused by the varying beamforming coefficients in time. The proposed architecture can be applied to different radar waveforms, e.g., radar pulses, and even in the joint radar and communications scenario [
31], with small modifications.
This paper is organized as follows. In
Section 2, we describe the method of simulating the FMCW waveform and the skin-return of a moving target. In
Section 3, we introduce the triangular FMCW waveform and describe some basic processing ideas. In
Section 4, we present the tracking and measurement system receiver architecture and give details about each receiver block. In
Section 5, simulation results about three simulation scenarios are presented.
Section 6 gives a brief discussion about the results. Lastly, we draw some conclusions in
Section 7.
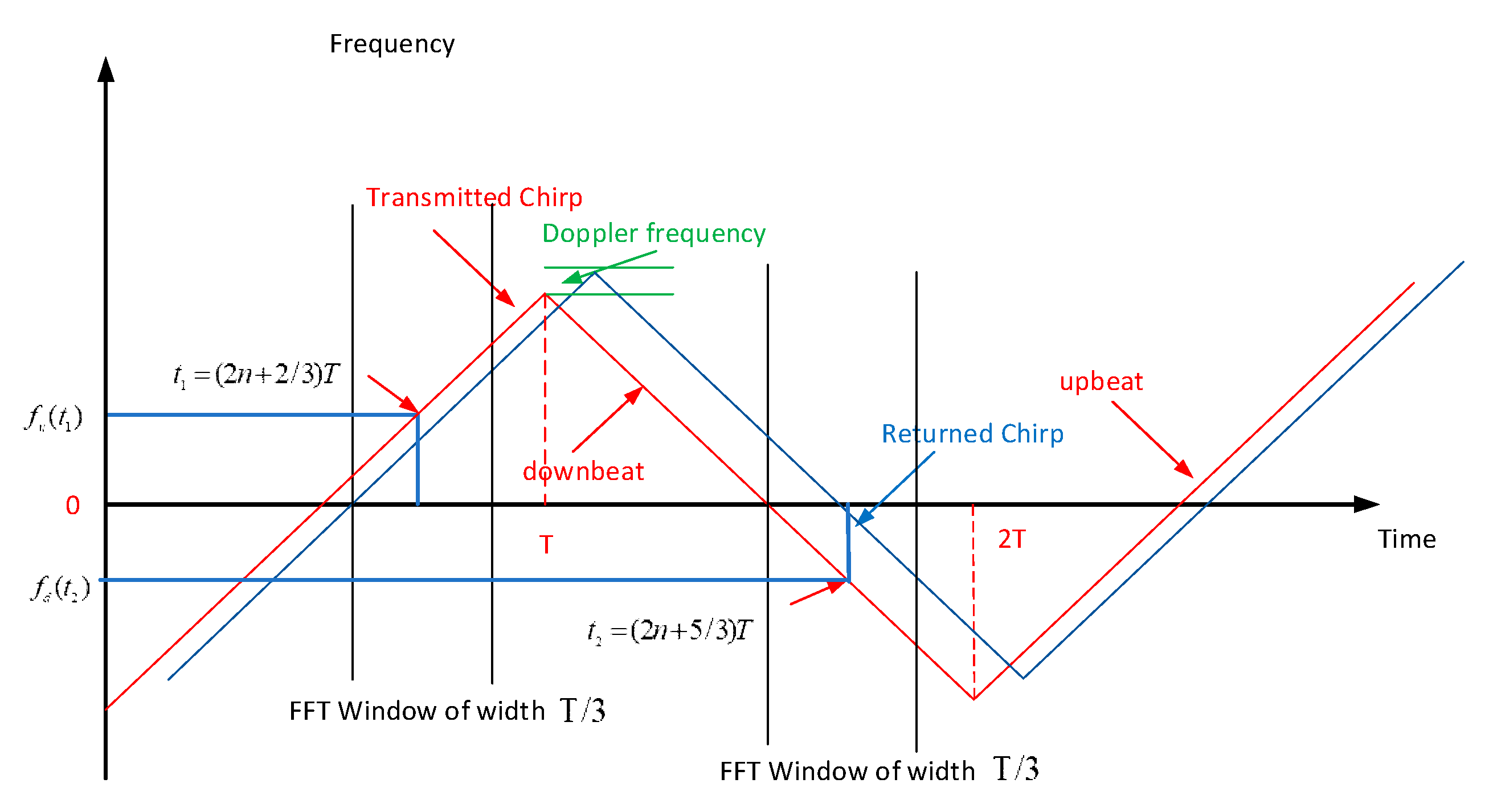
3. FMCW Triangular Waveform
The chirp signal uses the triangular waveform. The triangular shape depicts the change of the chirp signal’s frequency component over time. The frequency of transmitted waveform versus time is:
where
is the carrier frequency of the chirp signal, and
stands for the slope of the chirp signal, while
stands for the upbeat or downbeat time duration as illustrated in
Figure 9.
The transmitted waveform in a closed form is
When this RF signal hits a moving target with the radial speed
(m/s) at a distance
relative to the transmitter, it bounces back to the receiver with the radial speed
(m/s) at a distance
relative to the receiver. The received signal can be expressed in a classical physics sense as:
where
and
are the gain and phase introduced by the EM wave reflection/scattering and other losses in the two-way path of TX (antenna)-target-RX (antenna), respectively.
is the time of receiving the signal at the radar receiver,
and
is the time instance that reflection/scattering occurs, and
where
is the initial distance between the transmitter and the target, and
is the initial distance between the receiver and the target. Note that the observable range for radar measurement is defined as
and we assume
, so that the range ambiguity is not considered.
We choose the FFT windows centered at
and
as shown in
Figure 9 to estimate the Doppler values and ranges with both the upbeat and the downbeat waveform. We assume that the transmitter and the receiver are powered up at the same time, i.e., time
, thus
and
are with respect to this power-up time. In this paper, we choose
and
as the centers of the FFT windows, and assume that the FFT window has a width of
. Here,
stands for the
period. With this parameter selection, the guard time is
and can guard max one-way propagation time of
.
By taking derivatives to the phases at
and
in Equation (16) using the chain rule of derivatives, where
stands for the
period, we can estimate the frequency of the received waveform in the selected FFT windows as:
The FFT windows centered at and are properly guarded before and after the windows in time so that they only contain the skin return signals in upbeat or downbeat, respectively. This avoids the difficulty in spectrum analysis due to having received signals in both upbeat and downbeat.
We also define the observable radial speed for radar measurement at time
as
v, where
The quantity and will be estimated in the simulation. Since the transmitter and the receiver are very close to each other and the speed of the target is much less than the speed of light, we have
Subtracting the frequencies of the transmitted waveforms from
and
we obtain:
After plugging in
and
, we obtain:
The Doppler frequency is thus estimated by
By properly choosing the parameters
and
, and by ignoring the terms of
and
since they are very small, as
and
are much smaller than the speed of light
, we obtain:
4. The Receiver
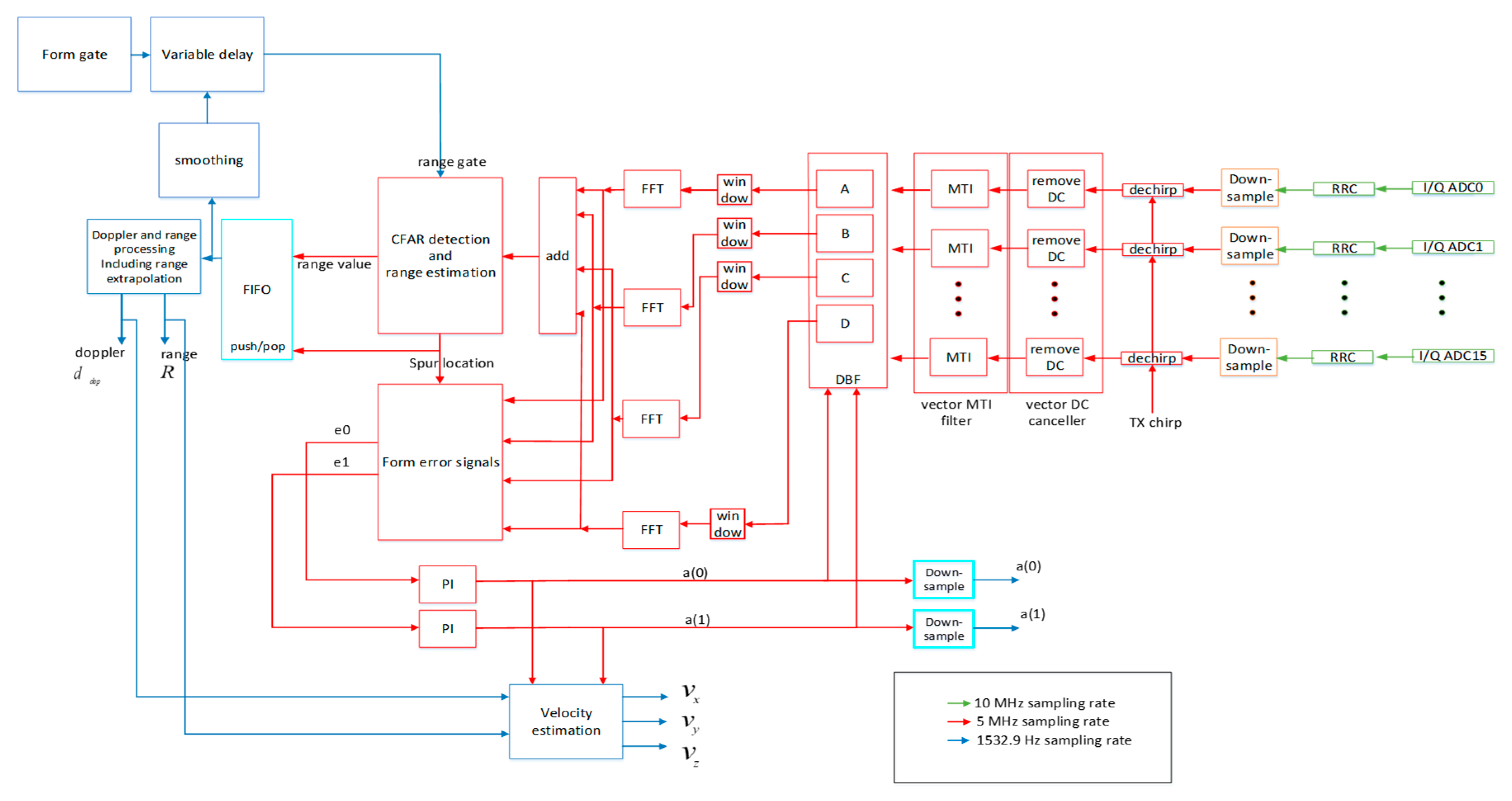
4.1. The Receiver Diagram
The digital portion of the receiver diagram is shown in
Figure 10. It takes complex I/Q samples after ADCs from a 4 × 4 array and filters them with a root-raised-cosine (RRC) filter for each of the ADC input stream. The RX RRC filter is the same as the TX RRC filter. Both RRC filters are used to filter out the out of band spurious signals and to improve the flatness of the in-band frequency domain response. Then de-chirp operations are applied using the baseband version of the TX chirp waveform. After de-chirping, the DC component of each input stream, which retains the TX-to-RX leakage signal, is removed. Then DBF is applied based on angle quantities
and
. After DBF, 16 signal-streams from vector MTI filter form four partial sums in four quadrants, labeled as A, B, C, and D in Figure 17, for one target. These four signals are sent to four Chebyshev window function units to reduce the sidelobes of the main spurs.
After the window function, the signals are fed into four FFT engines. Note that the time window of the FFT centers at
and
specified are shown in
Figure 9. These four FFT outputs are added together to form the sum signal after DBF. Note that the four FFT outputs are serialized from FFT index
to FFT index
and form four time series at the baseband sampling rate. This is because
-point time-domain I/Q signals fed in the FFT and
bins are produced by the FFT engine. Since these FFT indices are proportional to the two-way propagation delays, these time series are called “post-FFT time series”. The pre-FFT time series at the baseband sample rate
is indexed by
and the post-FFT time series at the baseband sample rate
is indexed by
. The key notations are summarized in
Table 1.
Tone detection is performed within a specified range gate. The definition of the range gate will be discussed in a later section. The tone location in the post-FFT time series and the range value corresponding to the desired tone’s FFT index are outputted. The error signals and for the measured target are formed based on the tone location and four FFT outputs of the four quadrants A, B, C, and D. Then the PI controller uses these error signals and the initial angle information to form the output angles quantities and . Since the target moves continuously, the range gate needs to be adjusted continuously. This is done by adjusting the delay value of the range gate according to the estimated propagating time based on the range estimates.
4.2. De-Chirp of the Received Signal
The digital version of the transmitted chirp signal from the transmitter is written as
. The output signal from de-chirp signal processing can be expressed as follows:
where
is the complex conjugate operation and
is equivalently to
, which is down-sampled from
by a down-sampling factor
.
As explained in Equation (16), a propagation delay in the round-trip path of the waveform is translated to a frequency shift from the center frequency. By analyzing the de-chirped signal in the baseband, we can see a distinct frequency component, away from the origin of the frequency axis. The amount of frequency shift is in proportion to the signal delay.
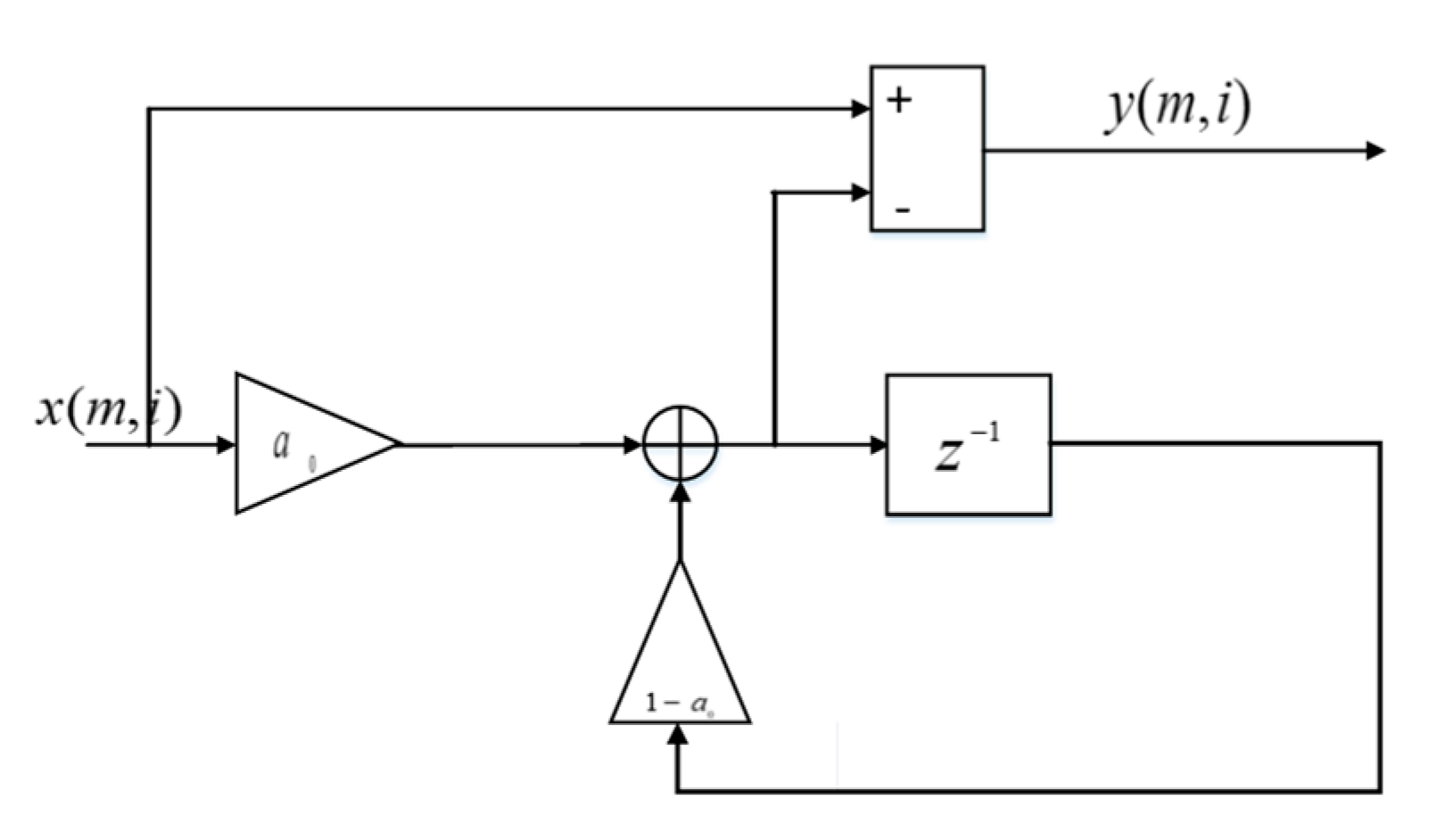
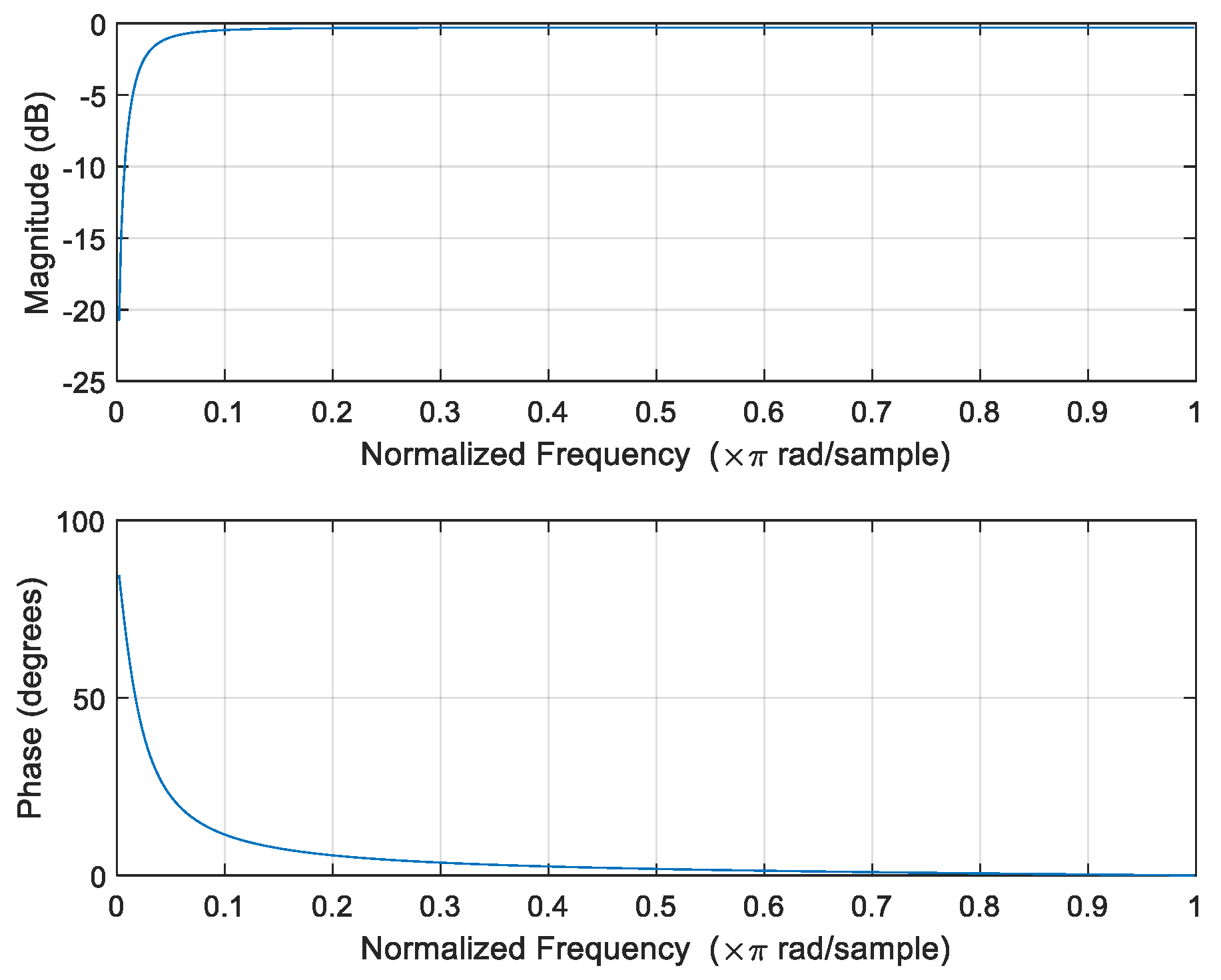
4.3. The Vector DC Canceller
It is well known that the useful signal of the target skin return can be buried by the TX-to-RX leakage signal at the receiver with the continuous wave. In some prior arts, the TX-to-RX leakage is attenuated by a DC canceller after the beamforming operation. This imposes some restrictions to the beamforming operation. For example, it requires a stepping response of the angle update for the beamforming operation and requires tight synchronization between the angle update and the DC cancellation. In our design, we use a per antenna DC canceller before the beamforming operation as illustrated in
Figure 10 and
Figure 11. This is a first order IIR filter. In this manner, the strong DC of the TX-to-RX leakage is removed completely. We illustrate the filter response of the digital DC filter in
Figure 12.
Although we can remove the DC component using the DC canceller, relatively weak near DC spurs are in the presence as illustrated later in Figure 18. They are caused due to the non-ideality of the RRC filter. The amplitude response of the RRC filter is not flat. Thus, the FMCW waveform amplitude is modulated by this amplitude response after passing the ideal FMCW waveform through the RRC filter.
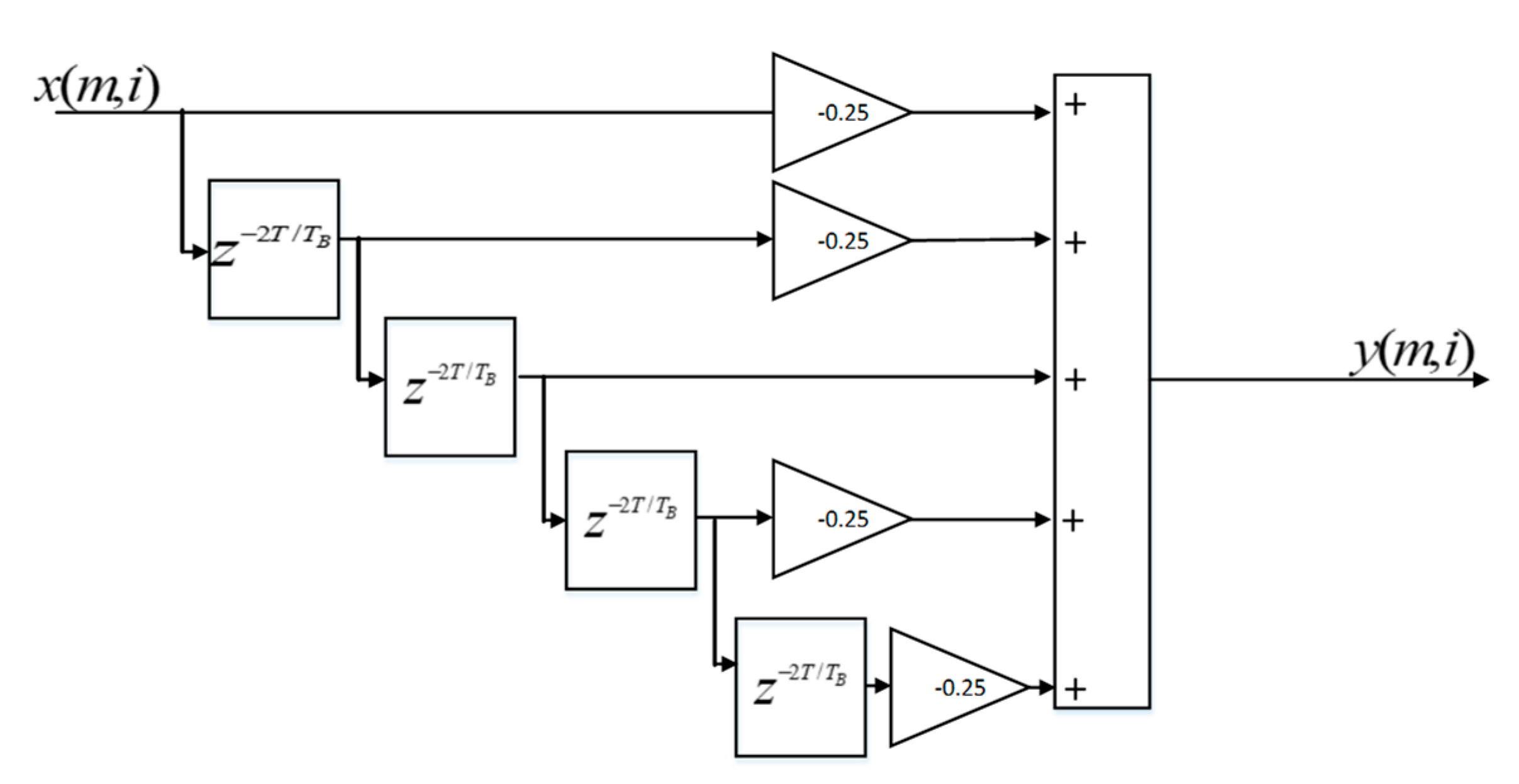
4.4. The Vector MTI Filter
In order to remove the effects of the strong echoes of the clutters, an MTI filter is introduced. Since the antenna panel does not move with respect to the ground, the MTI filter can be applied in each receiving channel after each RX antenna before DBF. Normally, the MTI filter can be done in the post-FFT domain. However, it requires per-antenna FFT operations. As illustrated in
Figure 10, the FFT operation is after the MTI filters, hence the time domain vector MTI filter is introduced in our design and illustrated in
Figure 13. This is because the FMCW waveform is periodic with a period of
baseband samples. The MTI filter is FIR and has an order of 4. An IIR version can be introduced to further improve the filter response as a design choice.
The MTI filter amplitude response versus the target radial speed is shown in
Figure 14 as an example. The nulls of the filter correspond to the blind speeds of the target. The first null corresponding to the zero speed can remove the stationary or very low speed clutter echoes from the received signal. The second null corresponding to about 275.5 km/h radial speed is called the blind speed. When the target speed is about an integer multiple of the blind speed, the MTI filter removes the target skin return as well. In the later part of this paper, we introduce the CFAR detector and range extrapolation as a work-around to this issue.
4.5. Range and Doppler Estimation
Let
be the picked tone location from the sum signal in the FFT domain of
for the
upbeat, we have:
Similarly, for the
downbeat, we can detect a tone at FFT index
. We have:
Based on Equation (26), we can estimate the range as:
Given the baseband bandwidth
, the normalized Doppler is defined as:
Based on Equation (25), we can estimate the normalized Doppler value at the
FFT window pair (the FFT window for the upbeat and the FFT window for the downbeat) as,
Note that the estimated range and Doppler are updated at the sampling rate.
4.6. Range Gate
The range gate is denoted by where and lie within the FFT index range of and is the center of the range cell under test in either upbeat or downbeat of the echo signal. The tone location of the intended target needs to lie within the range gate. Note that the desired tone index and range gate center index are not always the same. The quantity allows an uncertainty from the range estimation process and accounts for the sidelobe region in the spectrum due to the window function.
Since the FMCW waveform is modulated, the post-FFT tone is strong in the spectrum main-lobe and it is very weak in the spectrum sidelobe (due to the window function), the conventional range gate control mechanism for the un-modulated signal [
4] does not apply. In our design, the gate center control simply uses a moving average filter. The feedback part of the range gate tracking loop consists of “form gate”, “smoothing”, and “variable delay”, as shown in
Figure 10. The range gate is first formed using a square waveform generation circuitry with the properly generated gate width
. Then the range gate tracking loop utilizes a variable delay function, which delays the range gate by the detected FFT tone location index in the post-FFT time series. To improve the tracking accuracy, the FFT tone location indices
and
are smoothed by smoothing
and
. This is the smoothing block illustrated in
Figure 10. This moving average tone location is translated into a delay time and is used to delay the range gate accordingly.
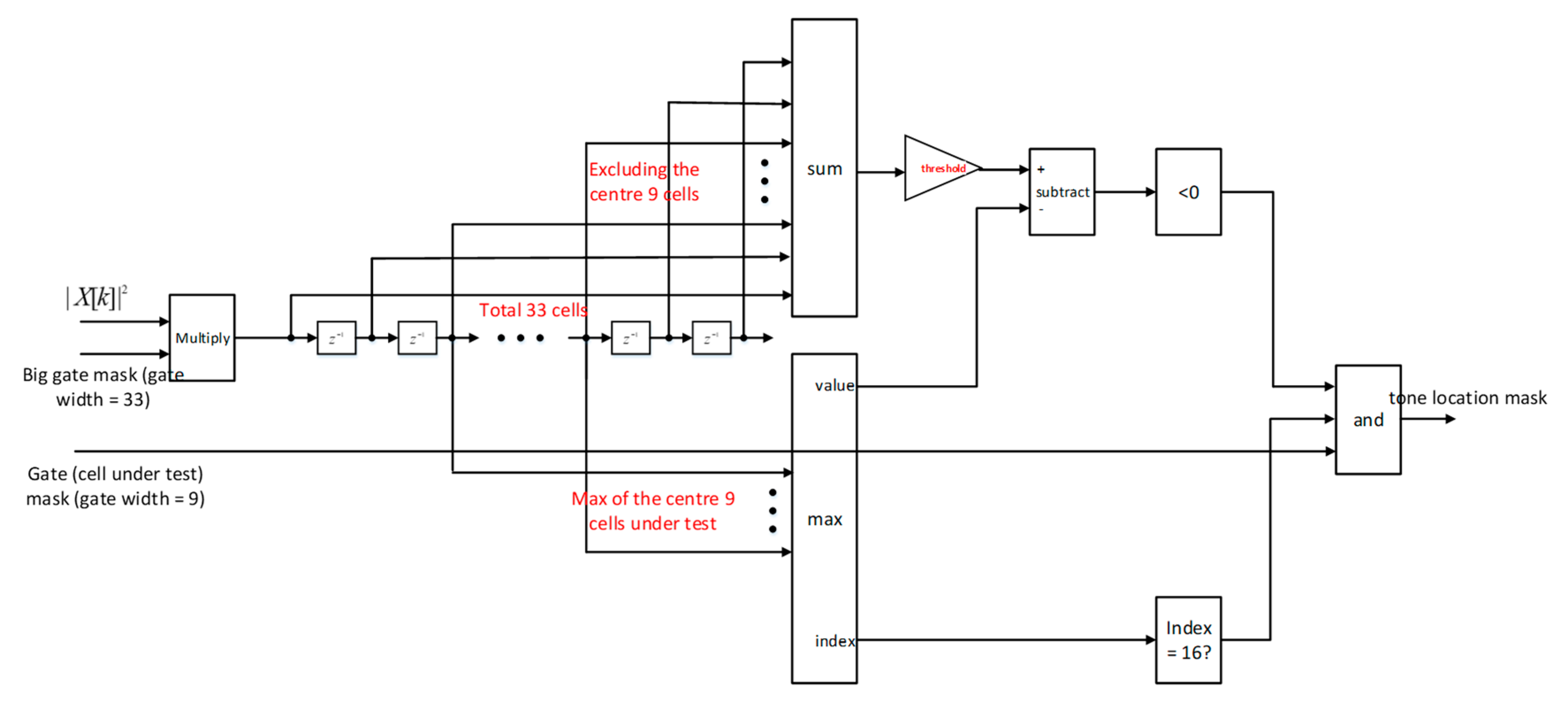
4.7. The FMCW CFAR Detector
The standard cell-averaging CFAR detector [
26] is applied to the post-FFT domain of the sum signal of DBF as illustrated in
Figure 15. From [
26], we adopt the CFAR detector figure here for illustration purposes. The cell under test is governed by the range gate of
post-FFT frequency indices centered at
. In the range cell under test, we pick the index that corresponds to the maximum power of the
frequency indices, i.e.,
Ideally, if the range gate is tracked properly, the center of the test cell corresponds to the maximum. Outside the range cell under test, we collect the average power of the
post-FFT indices to determine the noise and residual clutter power floor, namely,
. We define
as the power ratio between
and
When
, the CFAR detector threshold, the index location with the maximum power will be recorded. Otherwise, the location of the maximum will not be discarded.
If this tone location
is recorded, the mono-pulse “Form error signals” in
Figure 10 is activated at this tone location of the post-FFT time series. The mono-pulse error signals are then enabled and are fed into the PI controller. More on mono-pulse error signals will be given later. Otherwise, the mono-pulse angle tracking follows the angle memory stored in the PI controller in
Figure 16 in the current time duration interval of
.
4.8. Range Extrapolation Using Doppler Estimate for Low Signal-to-Noise Ratio (SNR)
When the strength of the signal tone is below the CFAR detection threshold, we use a scheme to extrapolate the range estimation based on the last known range estimate
and last known Doppler estimate
. Since the signal tone can be significantly attenuated when the radial velocity is close to the integer multiple of the MTI blind speed, under this situation, the range extrapolation scheme helps to follow the actual range. The extrapolation uses the following simple formula:
The range extrapolation can be effective only when the last known range and Doppler estimation are relatively accurate.
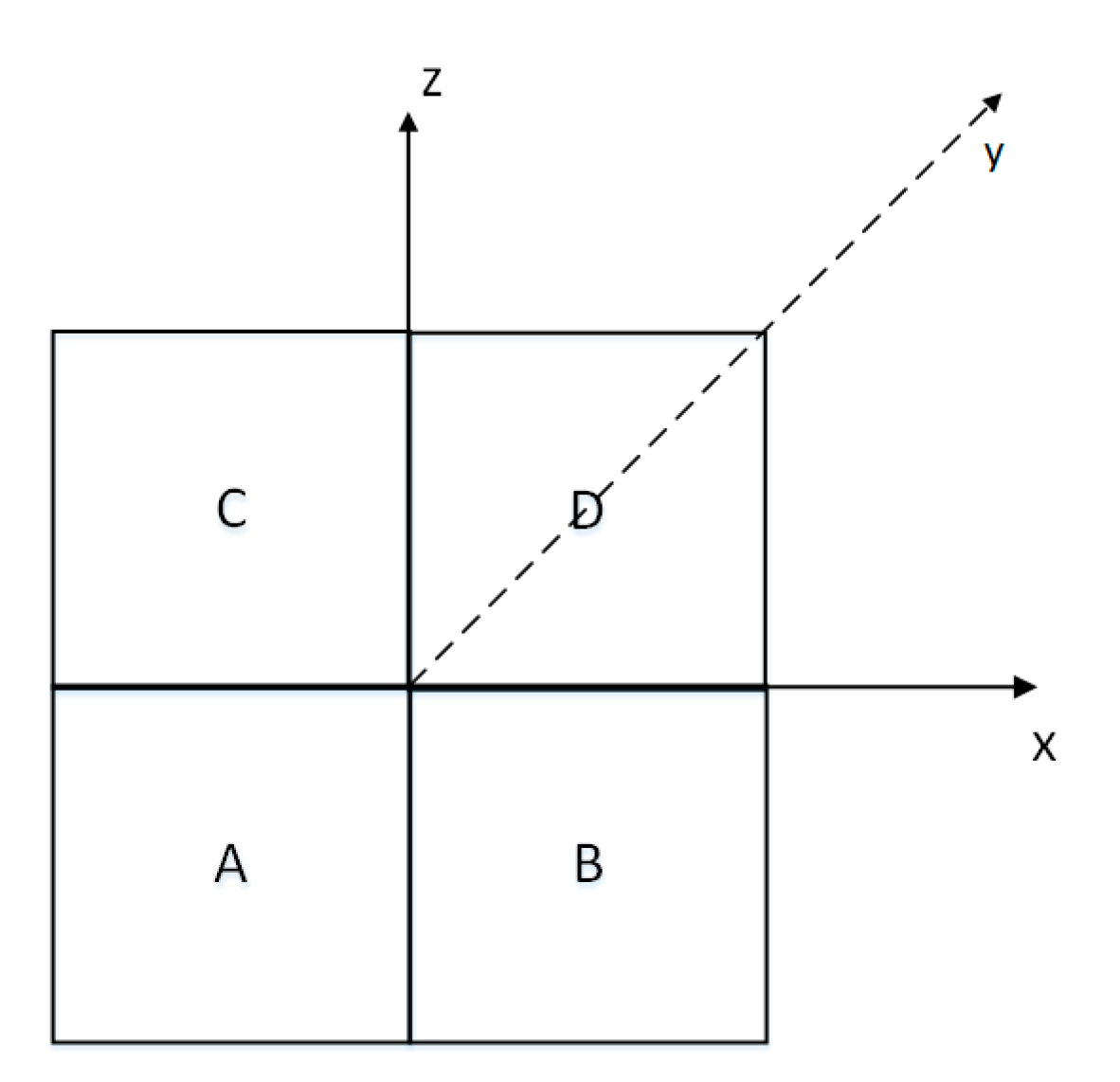
4.9. Four-Quadrant Digital Mono-Pulse Tracking
The four-quadrant mono-pulse tracking algorithm for pulse Doppler radar with mechanical steering can be found in [
28]. Here, we extend this algorithm to the FMCW phased array angle tracking scenario. The antenna panel is equally divided into four quadrants, labeled as A, B, C, and D, as illustrated in
Figure 17. The partial sum of received signals after digital beam forming in the quadrant
has the following form:
After the point FFT, the output from each quadrant is , where is the post-FFT time-series index. If target tone locations from CFAR detection are recorded in the upbeat and downbeat of the FFT window pair during the 2T time-period, the signal of these tones can be represented as and , respectively. The sum signal is . For the upbeat and downbeat of the FFT pair, the CFAR detected sum signals are and .
4.10. Angle Tracking Error Signals
The tone location
in the post-FFT time series will be used to read the FFT outputs from the A, B, C, and D quadrants, denoted by
,
,
and
. Then we can form the angle tracking error signals
and
as follows,
where
stands for evaluating the angle of a complex number.
4.11. Angle Tracking Loop
The angle tracking loop relies on a closed loop control feedback mechanism. The classical PI controller is used to drive the digital beamformer. Starting from the initial and values in the proximity of true and the controller uses and to update the new estimated and values for the digital beamformer. The new estimated and will affect the estimation of the new and values.
The PI controller implementation in the baseband sampling domain has the structure shown in
Figure 16.
The constant value . The constant and are fine-tuned for a medium range scenario. They can be scaled by the inverses of the estimated range values.
4.12. Velocity Estimation
Based on two range and angle estimations separated by
time duration, we can estimate the velocity on the
axes
where
denotes the
time period, and
5. Results
In this section, we present the Simulink simulation results. The simulation setup is first presented. Then, in this controlled environment, we compare the angle, range, Doppler, and velocity estimation results of three configured scenarios with the true angle, range, Doppler, and velocity values.
5.1. Simulation Setup
We first simulate the effect of line-of-sight target skin return to lower the computational complexity in order to demonstrate a fully functional FMCW-based moving target tracking and measurement system. Then, we focus on the results in the scenario with a target, where it is fast moving and a strong clutter with zero velocity. Additionally, for simplicity, the simulation considers none of the effects of target glint, angle scintillation, atmospheric propagation, and multi-path propagation. The Simulink parameters are shown in
Table 2.
Note that the quantities like initial angles and initial ranges of the moving target and the clutter are variables changing based on the scenarios. This table shows the common parameters used for the simulation scenarios. We will define the three scenarios later. In each scenario, we apply the standard Chebyshev window with sidelobe suppression.
With the point FFT, the resolution range of the radar in the frequency domain . The range gate spans frequency indices. The guard range of the range gate is translated from the guard frequency indices from the left or the right of the center frequency index in the range gate, and it is equal to Due to the blind speed effect, the target tone is fully buried under the noise floor for a certain period of time, and even when the target moves out of the blind speed, the target tone is no longer at the center of the range gate. There exists a range offset between the times before and after the blind speed zone when the target is detected. Therefore, we need a wider range gate to accommodate this range offset so that the target tone can be re-detected when the target moves out of the blind speed.
The radar operates at carrier frequency. The triangular chirp signal has a period of samples. The blind speed is 275.5 km/h.
There are three simulation scenarios. Scenario I and II are used to demonstrate both the CFAR detector and the range extrapolation functions. Scenario III is used to demonstrate how the long range and high-speed tracking work.
The initial range and angle and the TX antenna gain information are common for the scenarios I and II. They are shown in
Table 3. The initial range of the moving target is
. The mean square of the velocity vector of the moving target is
, equivalently
. The initial radial speed is about
, i.e.,
. The target moves into the blind speed Doppler zone, then moves out of it in these scenarios. In the scenario I, we set the CFAR detector threshold
and turn off the range extrapolation. In the scenario II, we set the CFAR detector threshold
and turn off the range extrapolation. We also illustrate the matching of the SNR measurement and the SNR calculation in the simulations. We also illustrate the CFAR detector works with its detection diagram over time.
Scenario III is a long-range and high-speed target scenario. The parameters like initial range and angle information are shown in
Table 4. The initial range of the moving target is
. The mean square of the velocity vector of the moving target is
, equivalently
. The initial radial speed is about
, i.e.,
The target moves into the blind speed Doppler zone, then moves out of it in this scenario. Due to relatively low SNR in Scenario III, we just set the CFAR detector threshold
and turn on the range extrapolation.
5.2. Simulation Results
5.2.1. Unit Test for the Vector MTI Filter
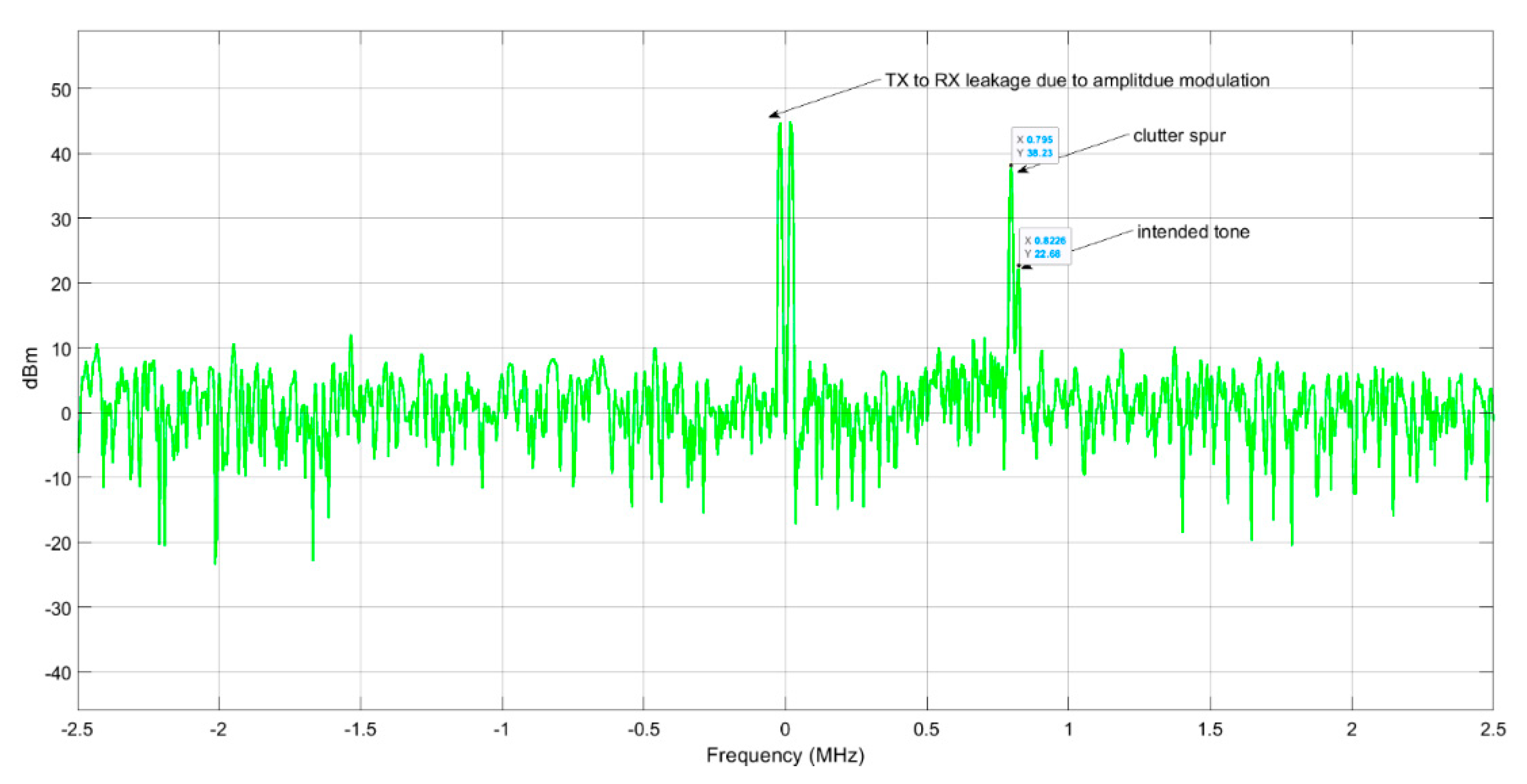
The spectrum plot at
of the simulation with the vector MTI filter turned off is shown in
Figure 18. The simulation setup is using scenario II. The post beamforming noise floor in the simulation is normalized to
(equivalent to
) with a gain normalization. This gain is introduced at the receiver and the signal power is scaled accordingly. Based on
Table 2, the noise floor is
dBm/Hz at each receiver antenna. The baseband bandwidth is 5 MHz. The noise power after DBF combining of 16 elements is
. Normalization is done by introducing a gain of
.
For the spectrum plot, since we apply the Chebyshev window for the spectrum analysis, additionally, the Chebyshev window enhances the noise floor by . Based on Equation (1) (the radar range equation), adding the normalization gain of , the DBF gain of and the FFT gain of , the signal power of the target after the FFT and the DBF is . The measured signal power of the target tone is The difference is small. The actual SNR of the target is . Similarly, the signal power of the clutter after the FFT and the DBF is based on the calculation. The measured signal power of the clutter spur is . The difference is caused by the signal leakage that happens when the exact spur location in the frequency domain does not align with the FFT index grid.
The spectrum plot at the end of the
simulation with the vector MTI filter turned on is shown in
Figure 19. In this case, the noise floor is
because the MTI filter enhances the noise power by
times, which is the summation of the squares of the filter coefficients
. Additionally, the Chebyshev window enhances the noise floor by
. Compared with the
Figure 18, the clutter spur and the two near DC spurs are both removed by the MTI filter. The measured signal power of the target tone is
. Given the final normalized Doppler value of 0.001037 and the chirp period of
samples, the MTI filter gain is calculated as
. Additionally, the final range reading is
. Therefore, the calculated signal power is
where the initial signal power is
at the
range. The difference between the measured and calculated signal powers of the target tone is likely caused by the angle error and the signal leakage due to the misalignment of the tone location with the FFT index grid. The SNR of the target tone is actually equal to
.
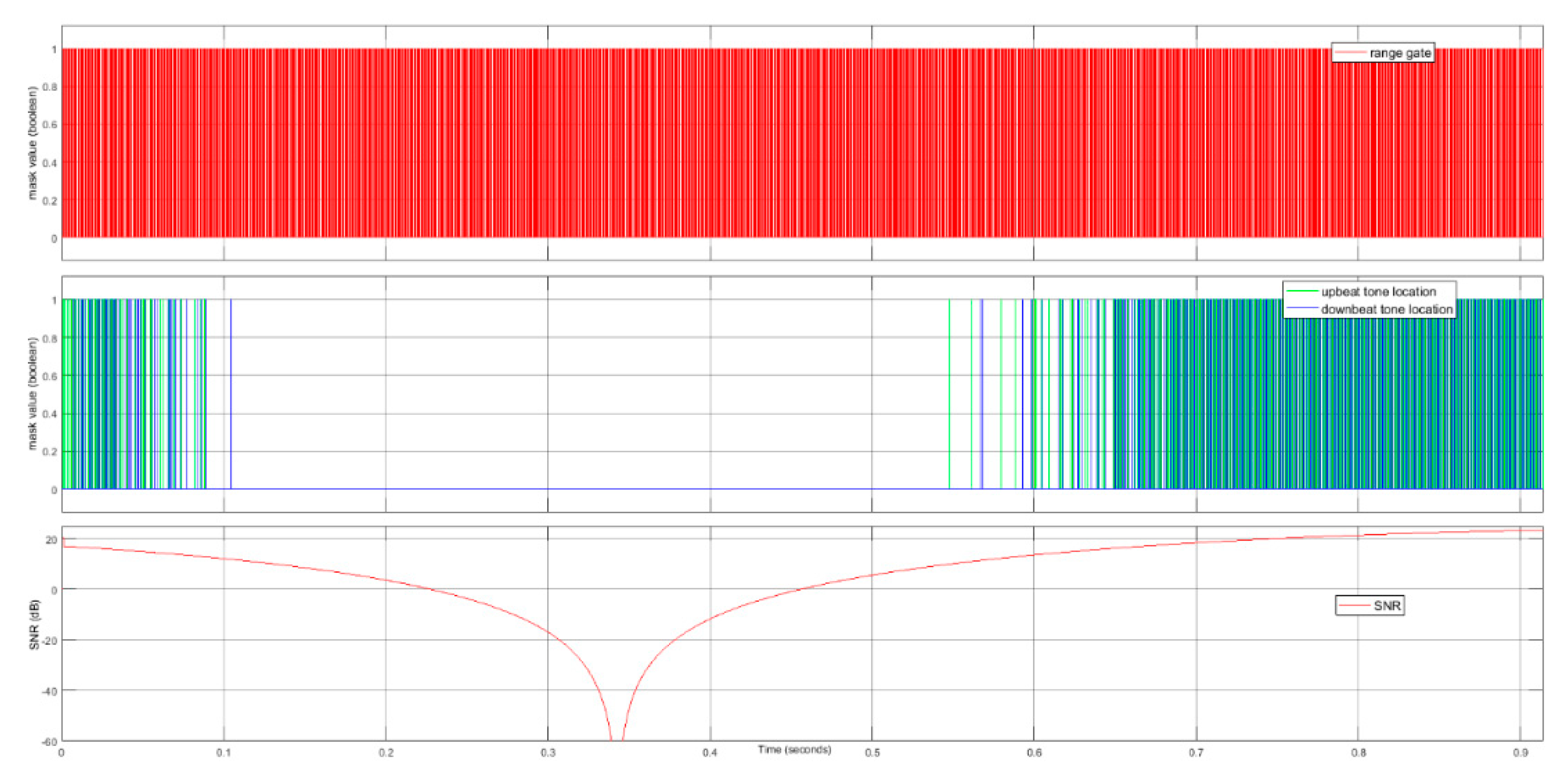
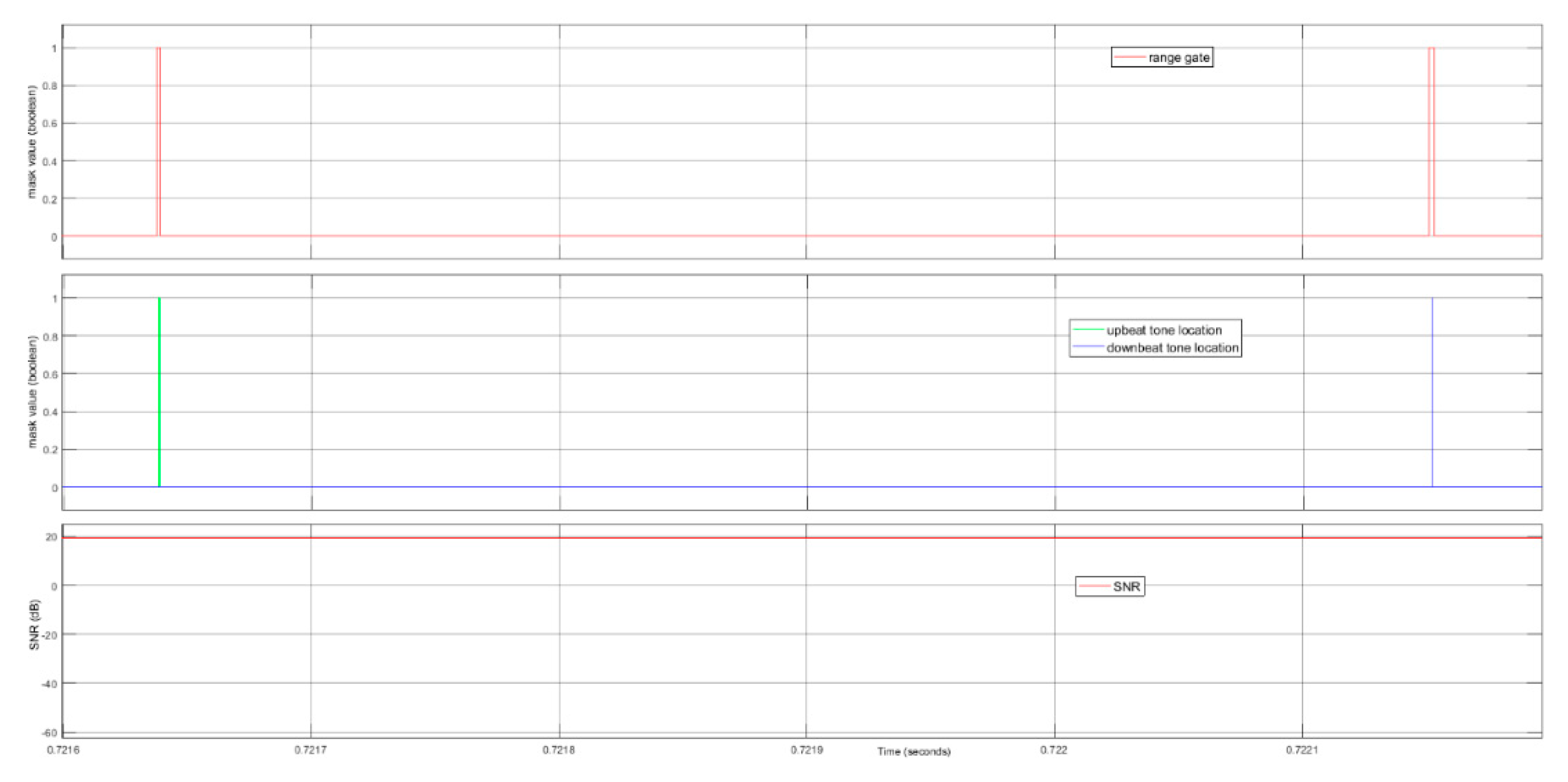
5.2.2. Unit Test for the CFAR Detector
For scenario II, we plot the unit test results for the CFAR detector. In
Figure 20, we plot the mask values of the tone locations, the mask values of the range gates, and the SNRs in dB scale. The mask takes a Boolean value of 1 or 0, representing whether or not the tone is detected in the second sub-figure or whether or not the range gate is selected in the first sub-figure. We observe that the CFAR detector cannot detect any tone location when the SNR is lower than
. Note that in this scenario, the CFAR detector threshold is
. This means that the cut-off of the successful detection does not happen at
, but lower than
. The main reason is that in CFAR detector, the cell averaging noise floor estimator uses only 24 cells, hence the noise floor estimation can be underestimated. In
Figure 21, we zoom in the plot of the CFAR detection time diagram. The tone locations in upbeat and downbeat are at the centers of the range gates, respectively.
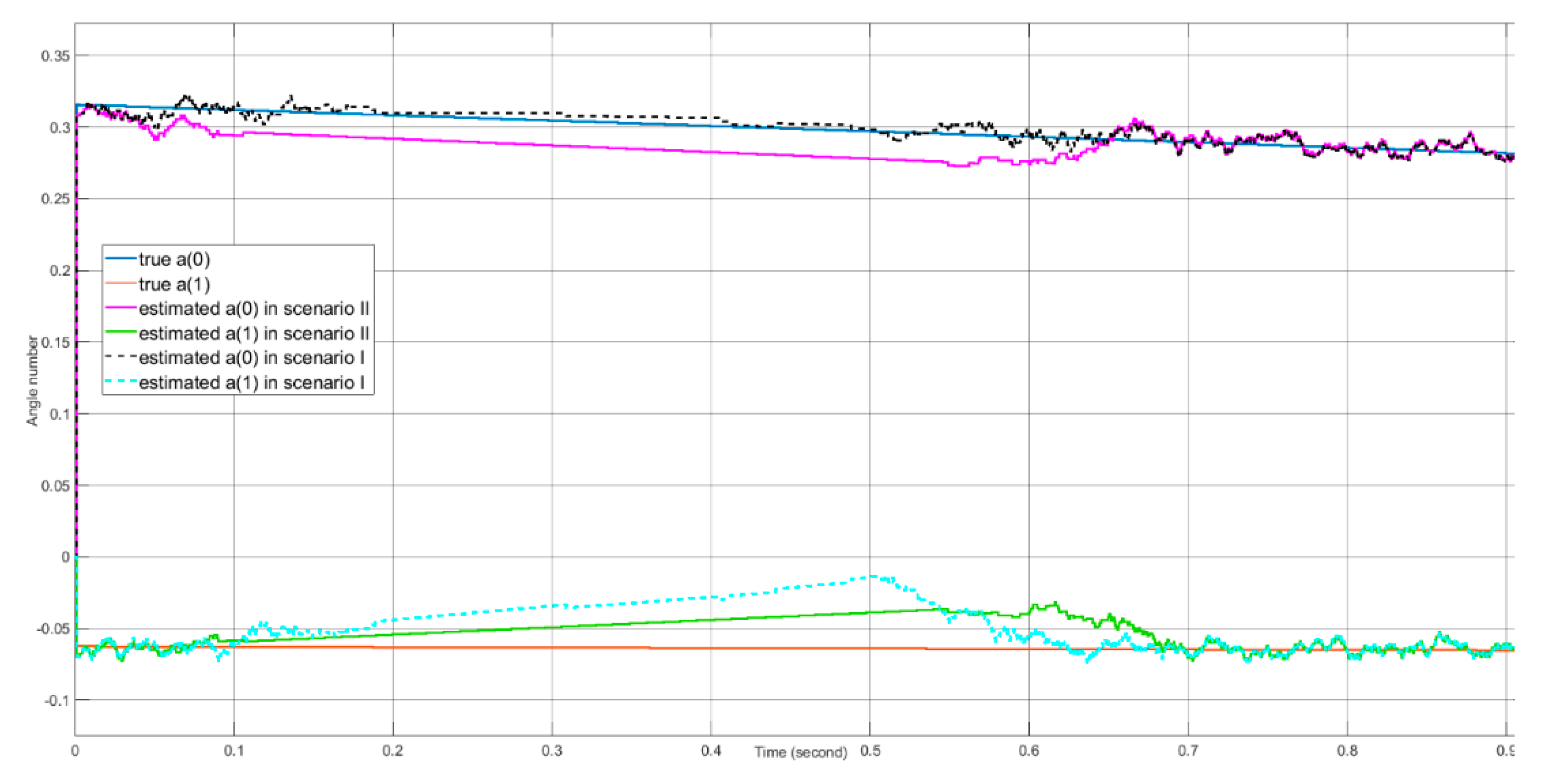
5.2.3. Angle Estimation
In
Figure 22, the estimated angle values in Scenario I and Scenario II are compared against the true angle values in terms of
and
. Due to the blind speed effect, in Scenario I, there is about
of time during which the intended tone has a low SNR, which is below or close to the CFAR detector threshold of 10 dB. The low CFAR detector threshold value causes a larger tracking error during this period of time than the result of Scenario II. In Scenario II, there is also about
of time during which the intended tone has a low SNR below the CFAR detector threshold of
. In this case, the angle tracking is purely driven by the memory of the PI controller. When the radial speed is not close to an integer multiple of the blind speed, the tracking error is smaller than
(
).
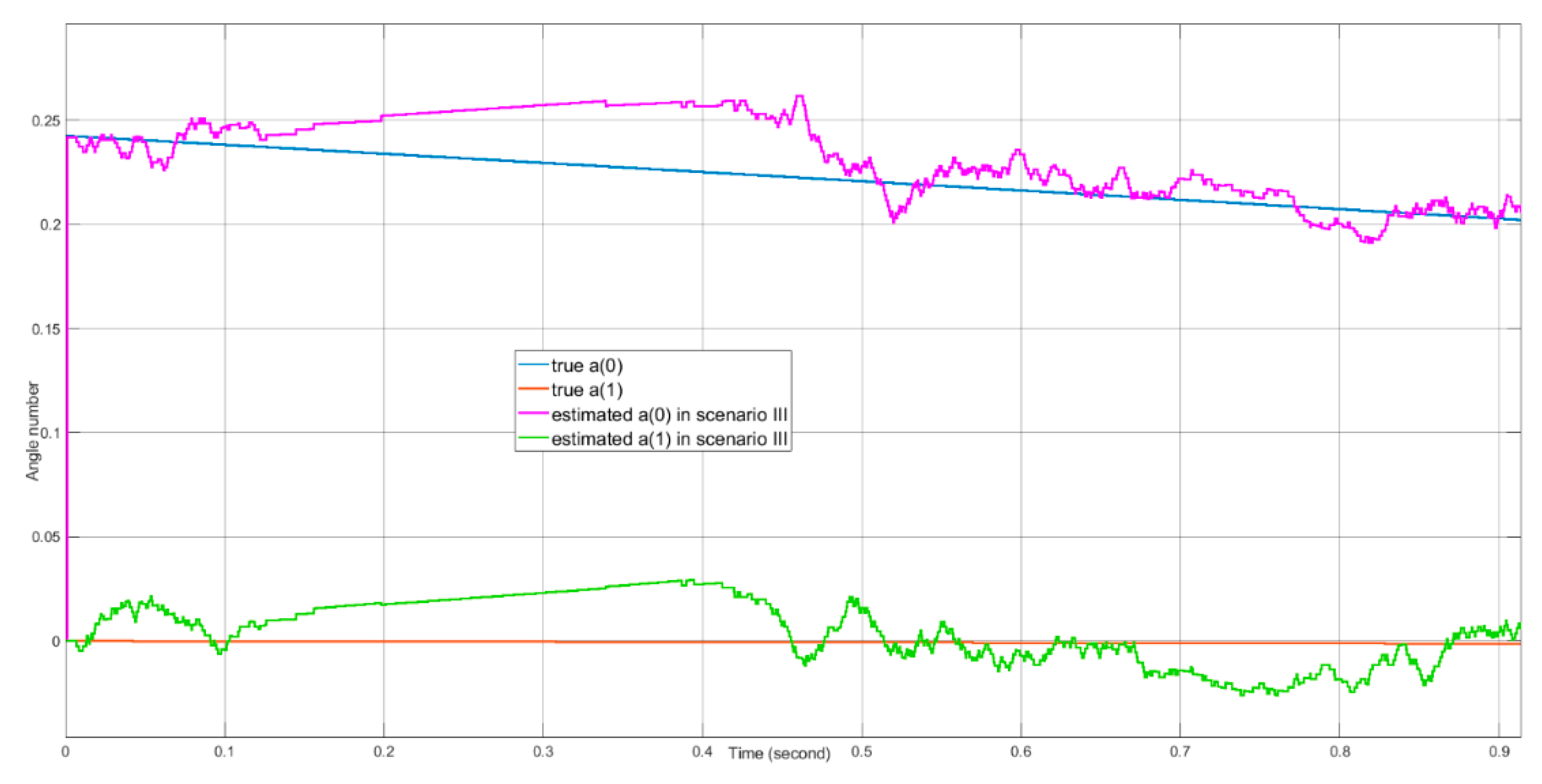
In
Figure 23, the estimated angle values in Scenario III are compared against the true
and
During the 0.4 s of time when the SNR is below the CFAR detector threshold, the angle tracking is driven by the memory of the PI controller and occasional false alarms. When the target is out of the blind speed Doppler zone, the tracking error is smaller than
(
).
5.2.4. Range Estimation
We plot the range estimate versus the true distance between the receiver (the origin of the coordinate system) and the target
in
Figure 24 and
Figure 25. In
Figure 24, due to the higher CFAR detector threshold and the range extrapolation scheme in Scenario II, the range tracking error in Scenario II is much smaller than that of Scenario I during the “blind speed” period of about 0.4 s. During rest of the time, the tracking errors of the two scenarios are similar to each other. In
Figure 25, the maximum range estimation error of Scenario III is lower than
during the blind speed Doppler zone of
time.
5.2.5. Doppler Estimation
The Doppler tracking results are presented in
Figure 26 and
Figure 27. In
Figure 26, during the “blind speed” period, the estimated Doppler value fluctuates more often in Scenario I than the estimated value in Scenario II due to the lower CFAR detector threshold value in Scenario I. The normalized Doppler tracking error is smaller than 0.002. The Doppler tracking error is thus smaller than 10,000 HZ. In
Figure 27, the Doppler tracking error of Scenario III is also lower than 10,000 HZ.
5.2.6. Velocity Estimation
The velocity tracking results are presented in
Figure 28 and
Figure 29. The estimated velocities the in
,
and
axes during the “blind speed” period are not in agreement with the true velocities for all three scenarios, mainly due to the angle tracking error in the blind speed Doppler zone.
5.2.7. The RMS Errors When Normal Tracking Takes Place
From the angle, range, Doppler, and velocity plots, both scenario I and II have the common normal tracking period beyond
of simulation time. Normal tracking simply means that the SNR values in each scenario after the MTI filter are above each of the CFAR detector thresholds of each scenario. Since all random generators for noise use the same random seeds, the simulation results are roughly the same after
of simulation time. The calculated RMS errors are shown in
Table 5.
5.2.8. The Total Simulation Time
The total recorded simulation time is roughly for of real time simulation. To speed up the simulation and the processing, the proposed hybrid time and frequency domain signal processing with target moving scenario will be planted on a commercial FPGA board, so that much faster M&S can be achieved.
7. Conclusions
The system model of a digital beamforming phased array system for fast moving object skin-return signal processing is presented in this paper with numerical modeling in Simulink. Using FMCW modulated EM wave, the proposed array system interrogates a moving target in a clutter environment and measures object in range, angle, and Doppler using joint time and frequency domain signal processing. Comparing with existing FMCW based tracking systems, the new system has much lower complexity, especially for a DBF array with large number of elements. Even at range and radial-speed, simulation results show that the system root-mean-square errors of range, angle, and Doppler tracking are , and , respectively. To speed up the simulation and the design process, the proposed hybrid time and frequency domain signal processing with target moving scenario will be planted on a commercial FPGA board. This way, much faster M&S can be achieved. In addition, the actual baseband processing chain on FPGA would allow real measurements in field experiments.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}