
Battery Parameter Analysis through Electrochemical Impedance Spectroscopy at Different State of Charge Levels



Abstract
1. Introduction
- This paper uses the parameter estimation approach presented in [27] to extract the battery ECM parameters based on EIS at multiple SOC levels.
- For the first time, the closed-form ECM parameters obtained using the frequency domain (EIS) approach were compared to the ECM parameters obtained using a time domain approach at multiple SOC levels. This time domain ECM parameter estimation approach [28] exploits the pulse stream current profile to reduce the error due to measurement noise. Furthermore, the proposed parameter estimation approach was partially tested based on parameters reported by the scientific grade measurement system.
- The ECM parameter estimation approach was applied to four different battery cells belonging to two different manufacturers, and the results were found to be consistent.
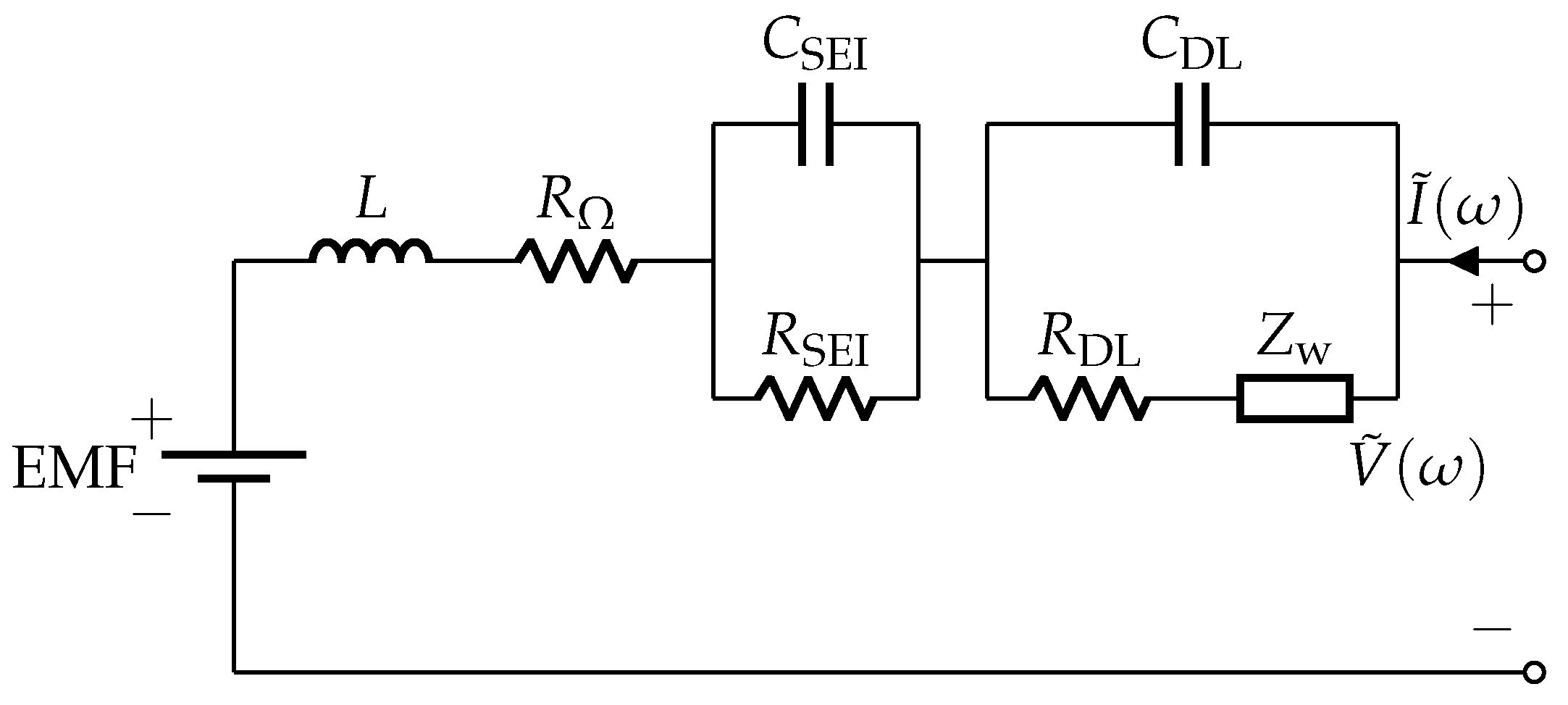
2. Frequency Domain Approach to ECM Parameter Estimation
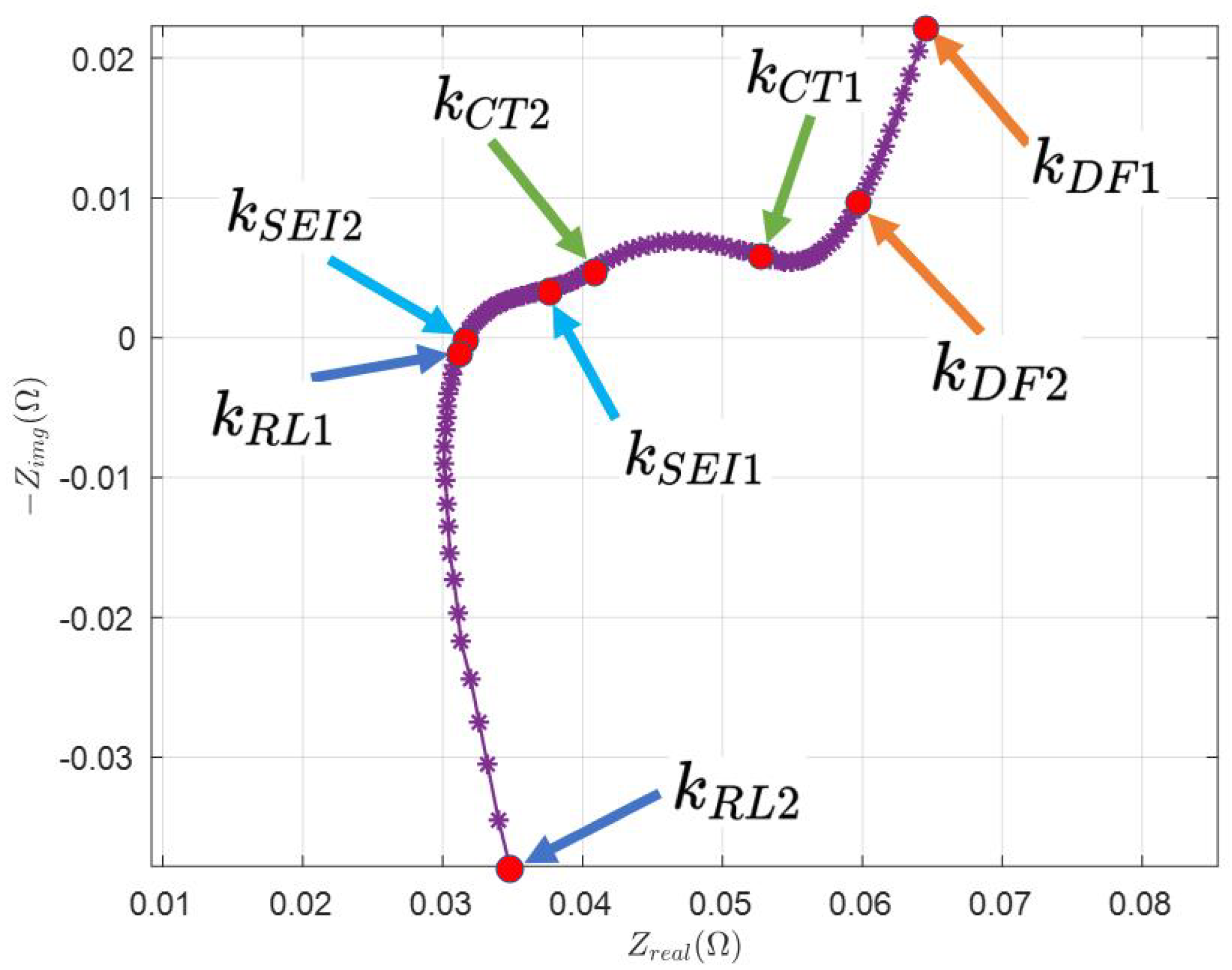
- is the index of the first data point, that is, .
- is selected such that the data points from to follow the linear line.
- is selected at the beginning of the CT arc such that the data points start to follow the arc.
- is selected at the end of CT arc such that to follows the CT arc to achieve the best fit.
- Similarly, is selected at the beginning of the SEI arc.
- is selected at the end of the SEI arc such that follow the SEI arc to achieve the best fit.
- is selected at the beginning of the RL arc.
- is selected at the end of the RL arc.
2.1. Estimation of Ohmic Resistance and Stray Inductance
2.2. Estimation of Warburg Coefficient
2.3. Estimation of and
2.4. Estimation of and
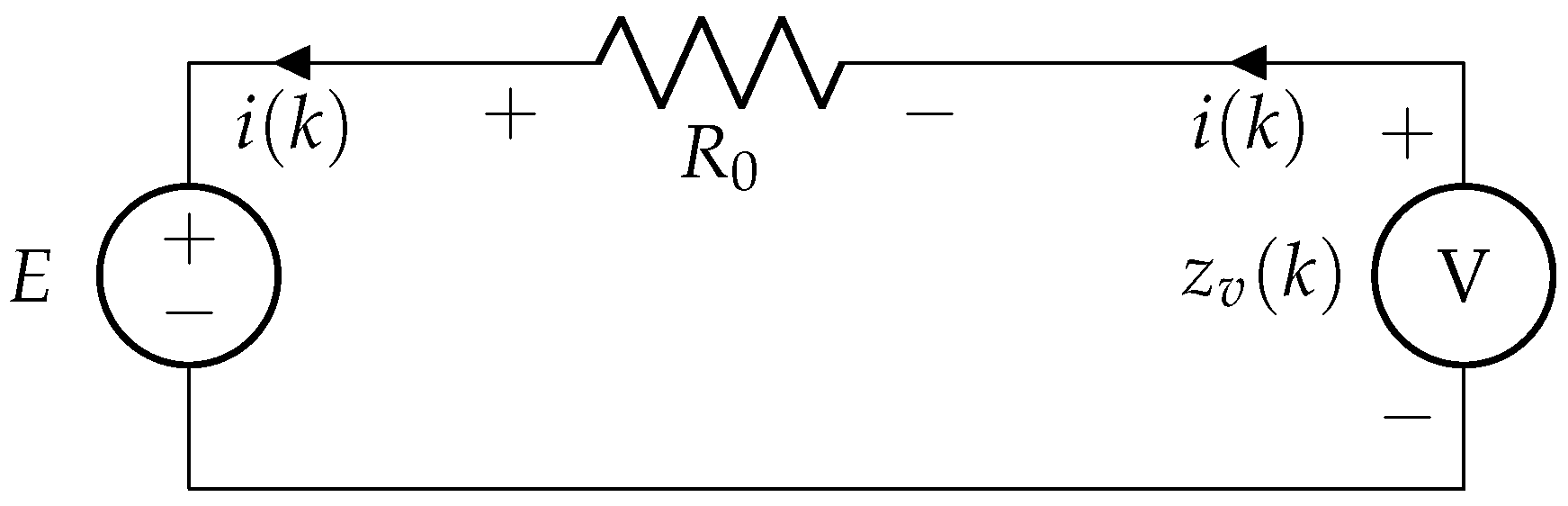
3. Time Domain Approach to ECM Parameter Estimation
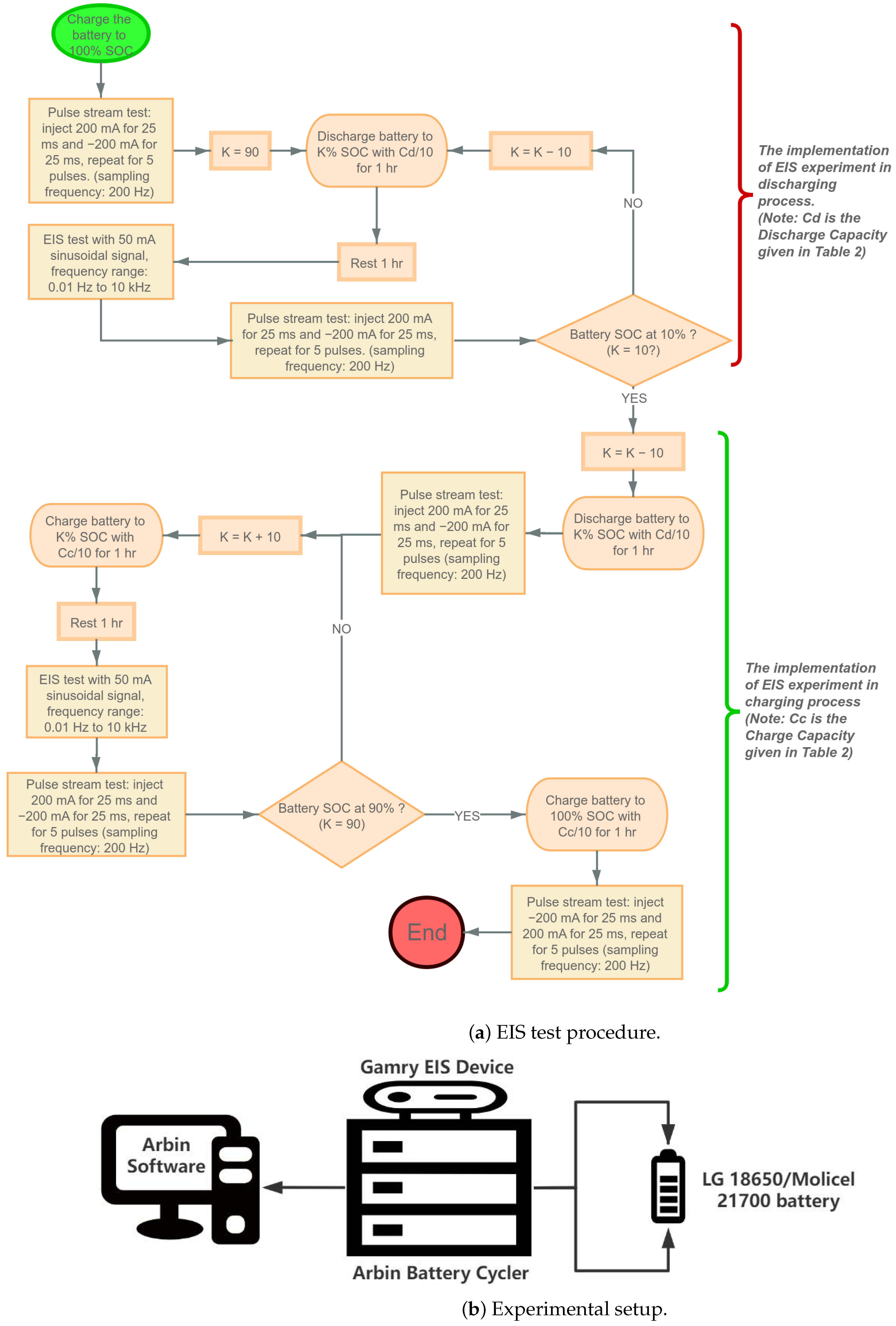
4. Experimental Procedure
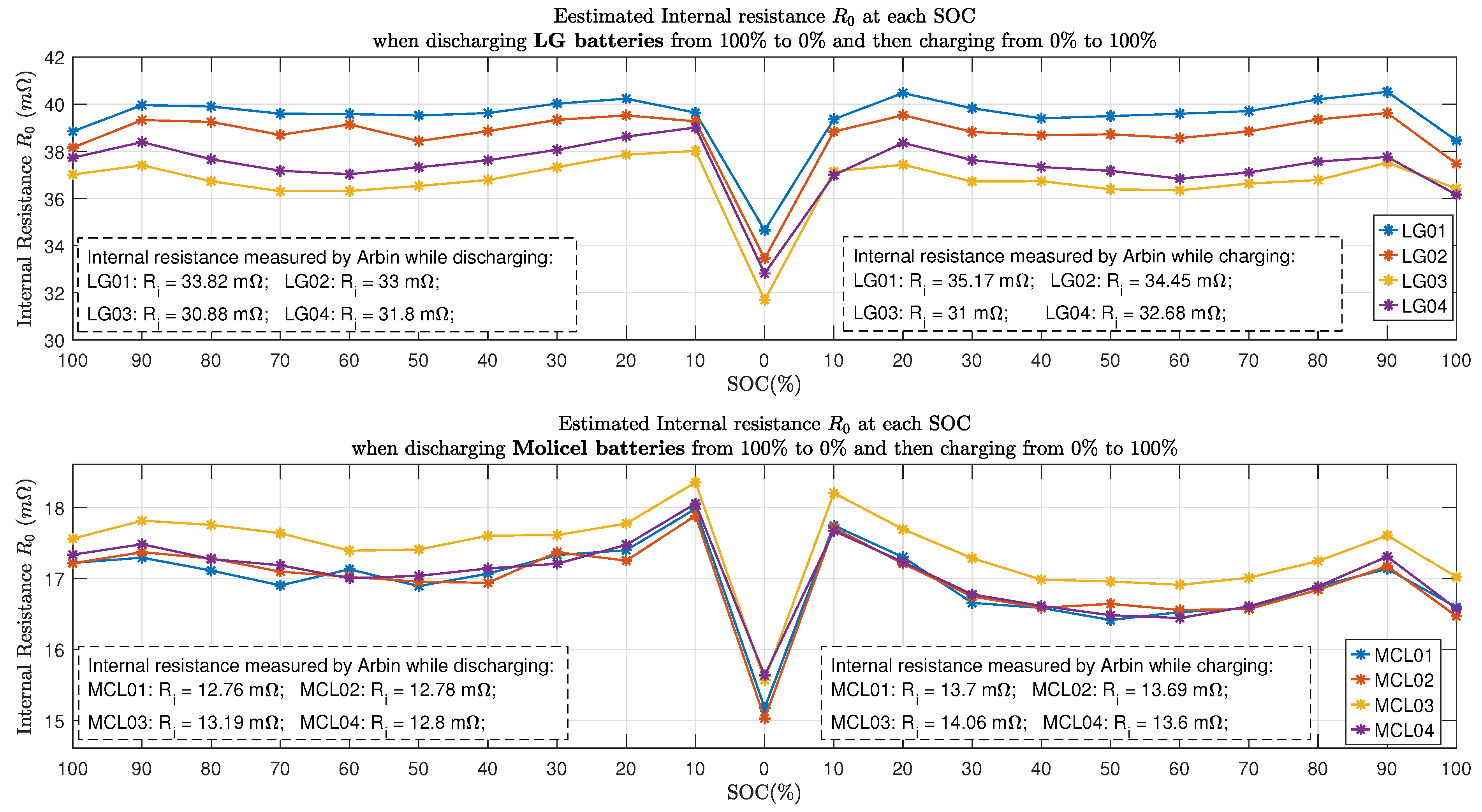
- Find the cut-off voltageTo ensure the maximum current in the CC-CV charging process below the safety limit, we need to set a conditional voltage, which should be greater than the cut-off voltage to decide when to start the CC or CV charging; the cut-off voltage can be written as:From Table 1, the internal resistance of the LG battery is less than 40 m, and the internal resistance of the Molicel battery is less than 15 m. The maximum current = 4.2 A, and the maximum voltage = 4.2 V. Therefore, in the OCV test, we set the conditional voltage = 4.1 V for LG batteries and = 4.15 V for Molicel batteries.
- OCV Test
5. Results
6. Conclusions and Discussions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Movahedi, H.; Tian, N.; Fang, H.; Rajamani, R. Hysteresis compensation and nonlinear observer design for state-of-charge estimation using a nonlinear double-capacitor li-ion battery model. IEEE/ASME Trans. Mechatronics 2021, 27, 594–604. [Google Scholar] [CrossRef]
- Pattipati, B.; Balasingam, B.; Avvari, G.V.; Pattipati, K.R.; Bar-Shalom, Y. Open circuit voltage characterization of lithium-ion batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, X.; Zhu, C.; Guo, B. Global parameter sensitivity analysis of electrochemical model for lithium-ion batteries considering aging. IEEE/ASME Trans. Mechatronics 2021, 26, 1283–1294. [Google Scholar] [CrossRef]
- Deng, Z.; Hu, X.; Lin, X.; Xu, L.; Che, Y.; Hu, L. General discharge voltage information enabled health evaluation for lithium-ion batteries. IEEE/ASME Trans. Mechatronics 2020, 26, 1295–1306. [Google Scholar] [CrossRef]
- Ahmed, M.S.; Balasingam, B. A scaling approach for improved open circuit voltage modeling in li-ion batteries. In Proceedings of the 2019 IEEE Electrical Power and Energy Conference (EPEC), Montreal, QC, Canada, 16–18 October 2019; pp. 1–6. [Google Scholar]
- Agudelo, B.O.; Zamboni, W.; Monmasson, E. A comparison of time-domain implementation methods for fractional-order battery impedance models. Energies 2021, 14, 4415. [Google Scholar] [CrossRef]
- Balasingam, B.; Avvari, G.; Pattipati, B.; Pattipati, K.; Bar-Shalom, Y. A robust approach to battery fuel gauging, part i: Real time model identification. J. Power Sources 2014, 272, 1142–1153. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H. Online estimation of model parameters and state-of-charge of lifepo4 batteries in electric vehicles. Appl. Energy 2012, 89, 413–420. [Google Scholar] [CrossRef]
- Islam, S.R.; Park, S.-Y. Precise online electrochemical impedance spectroscopy strategies for li-ion batteries. IEEE Trans. Ind. Appl. 2019, 56, 1661–1669. [Google Scholar] [CrossRef]
- Heaviside, O. Electrical Papers by Oliver Heaviside (In Two Volumes); MacMillon & Co.: New York, NY, USA, 1894; Volume 268. [Google Scholar]
- Orazem, M.E.; Tribollet, B. Electrochemical impedance spectroscopy. New Jersey 2008, 1, 383–389. [Google Scholar]
- Felder, M.P.; Gotze, J.; Banerjee, S.; Jansen, P. SoLE—An alternative approach for impedance measurement of Lithium-ion battery cells. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016. [Google Scholar]
- Allagui, A.; Baboukani, A.R.; Elwakil, A.S.; Wang, C. Electrochemical stability analysis of red phosphorus-based anode for lithium-ion batteries. Electrochim. Acta 2021, 395, 139149. [Google Scholar] [CrossRef]
- Murbach, M.D.; Schwartz, D.T. Analysis of li-ion battery electrochemical impedance spectroscopy data: An easy-to-implement approach for physics-based parameter estimation using an open-source tool. J. Electrochem. Soc. 2018, 165, A297. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.C.; Cao, B.; Cao, J. A new method to estimate the state of charge of lithium-ion batteries based on the battery impedance model. J. Power Sources 2013, 233, 277–284. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, J.; Cao, B.; Li, X. A simplified fractional order impedance model and parameter identification method for lithium-ion batteries. PLoS ONE 2017, 12, e0172424. [Google Scholar] [CrossRef] [PubMed]
- Pastor-Fernández, C.; Widanage, W.D.; Marco, J.; Gama-Valdez, M.-Á.; Chouchelamane, G.H. Identification and quantification of ageing mechanisms in lithium-ion batteries using the eis technique. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Qahouq, J.A.A.; Xia, Z. Single-perturbation-cycle online battery impedance spectrum measurement method with closed-loop control of power converter. IEEE Trans. Ind. Electron. 2017, 64, 7019–7029. [Google Scholar] [CrossRef]
- Pattipati, B.; Sankavaram, C.; Pattipati, K. System identification and estimation framework for pivotal automotive battery management system characteristics. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2011, 41, 869–884. [Google Scholar] [CrossRef]
- Agudelo, B.; Zamboni, W.; Monmasson, E.; Spagnuolo, G. Identification of battery circuit model from eis data. In JCGE-Congrès des Jeunes Chercheurs en Génie Electrique. 2019. Available online: https://hal.science/hal-02915697/document (accessed on 13 April 2023).
- Islam, S.; Park, S.-Y.; Balasingam, B. Unification of internal resistance estimation methods for li-ion batteries using hysteresis-free equivalent circuit models. Batteries 2020, 6, 32. [Google Scholar] [CrossRef]
- Kersten, A.; Kuder, M.; Han, W.; Thiringer, T.; Lesnicar, A.; Weyh, T.; Eckerle, R. Online and on-board battery impedance estimation of battery cells, modules or packs in a reconfigurable battery system or multilevel inverter. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 1884–1891. [Google Scholar]
- Galeotti, M.; Cinà, L.; Giammanco, C.; Cordiner, S.; Carlo, A.D. Performance analysis and soh (state of health) evaluation of lithium polymer batteries through electrochemical impedance spectroscopy. Energy 2015, 89, 678–686. [Google Scholar] [CrossRef]
- Jiang, J.; Shi, W.; Zheng, J.; Zuo, P.; Xiao, J.; Chen, X.; Xu, W.; Zhang, J.-G. Optimized operating range for large-format lifepo4/graphite batteries. J. Electrochem. Soc. 2013, 161, A336. [Google Scholar] [CrossRef]
- Feng, F.; Yang, R.; Meng, J.; Xie, Y.; Zhang, Z.; Chai, Y.; Mou, L. Electrochemical impedance characteristics at various conditions for commercial solid–liquid electrolyte lithium-ion batteries: Part. 2. Modeling and prediction. Energy 2022, 243, 123091. [Google Scholar] [CrossRef]
- Pastor-Fernández, C.; Uddin, K.; Chouchelamane, G.H.; Widanage, W.D.; Marco, J. A comparison between electrochemical impedance spectroscopy and incremental capacity-differential voltage as Li-ion diagnostic techniques to identify and quantify the effects of degradation modes within battery management systems. J. Power Sources 2017, 360, 301–318. [Google Scholar] [CrossRef]
- Ghadi, M.A. Performance Analysis and Improvement of Electrochemical Impedance Spectroscopy for Online Estimation of Battery Parameters. Master’s Thesis, University of Windsor (Canada), Windsor, ON, Canada, 2021. [Google Scholar]
- Pillai, P.; Sundaresan, S.; Pattipati, K.R.; Balasingam, B. Optimizing current profiles for efficient online estimation of battery equivalent circuit model parameters based on Cramer–Rao lower bound. Energies 2022, 15, 8441. [Google Scholar] [CrossRef]
- Balasingam, B.; Pattipati, K.R. On the identification of electrical equivalent circuit models based on noisy measurements. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Waag, W.; Käbitz, S.; Sauer, D.U. Experimental investigation of the lithium-ion battery impedance characteristic at various conditions and aging states and its influence on the application. Appl. Energy 2013, 102, 885–897. [Google Scholar] [CrossRef]
- Instrument Operator’s Manual; EIS Box; Gamry Instruments Inc.: Warminster, PA, USA, 2018.
- Approval Sheet–Lithium-Ion Rechargeable Battery; MOLICEL: Richmond, CA, USA, 2018.
- Product Specification–Rechargeable Lithium Ion Battery; LG Chem: Seoul, Republic of Korea, 2014.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value | |
|---|---|---|
| Molicel INR-21700-P42A | LG INR-18650-MJ1 | |
| Nominal voltage | 3.6 V | 3.635 V |
| Nominal capacity | 4200 mAh | 3500 mAh |
| End of charge voltage | 4.2 V | 4.2 V |
| End of discharge voltage | 2.5 V | 2.5 V |
| Internal resistance | ≤15 m | ≤40 m |
| Height | 70.2 mm | 65 mm |
| Diameter | 21.7 mm | 18 mm |
| Weight | 70 g | 49 g |
| Battery | Discharge Capacity (Ah) | Charge Capacity (Ah) |
|---|---|---|
| LG01 | 3.4063 | 3.3918 |
| LG02 | 3.4272 | 3.4228 |
| LG03 | 3.493 | 3.4972 |
| LG04 | 3.4853 | 3.4912 |
| MCL01 | 3.9867 | 3.98 |
| MCL02 | 4.0105 | 3.9953 |
| MCL03 | 4.0115 | 4.0249 |
| MCL04 | 3.9889 | 4.0025 |
| Battery | SOC (%) | L | |||||||
| 90 | 34.12 | 467.72 | 3.04 | 0.22279 | 4.91 | 1.7651 | 2.12 | ||
| 80 | 34.09 | 464.57 | 3.2 | 0.2151 | 4.29 | 1.6712 | 2.28 | ||
| 70 | 34.11 | 470.99 | 2.33 | 0.21431 | 4.04 | 1.0928 | 2.24 | ||
| 60 | 34.08 | 466.42 | 2.88 | 0.21156 | 4.01 | 1.4976 | 2.05 | ||
| LG01 | 50 | 33.82 | 34.21 | 473.66 | 2.82 | 0.23089 | 3.62 | 1.7077 | 1.54 |
| 40 | 34.22 | 468.48 | 2.72 | 0.21218 | 3.84 | 1.3592 | 1.50 | ||
| 30 | 34.17 | 465.74 | 3.22 | 0.20842 | 4.38 | 1.6185 | 1.47 | ||
| 20 | 34.28 | 473.25 | 3.36 | 0.23364 | 5.35 | 2.1996 | 1.54 | ||
| 10 | 34.55 | 465.79 | 3.4 | 0.20285 | 15.04 | 3.7892 | 3.12 | ||
| 90 | 33.33 | 448.08 | 3.35 | 0.22329 | 4.82 | 1.926 | 2.04 | ||
| 80 | 33.3 | 444.73 | 2.84 | 0.20036 | 4.46 | 1.2474 | 2.31 | ||
| 70 | 33.29 | 449.46 | 3.14 | 0.21614 | 3.89 | 1.7315 | 2.26 | ||
| 60 | 33.3 | 442.35 | 2.3 | 0.18748 | 4.38 | 0.84849 | 1.96 | ||
| LG02 | 50 | 33 | 33.35 | 451.24 | 2.34 | 0.21002 | 3.75 | 1.0752 | 1.54 |
| 40 | 33.38 | 444 | 3.21 | 0.20429 | 3.93 | 1.6539 | 1.50 | ||
| 30 | 33.33 | 444.65 | 3.58 | 0.20997 | 4.21 | 1.9187 | 1.47 | ||
| 20 | 33.46 | 451.29 | 3.91 | 0.24557 | 5.12 | 2.7591 | 1.68 | ||
| 10 | 33.75 | 457.08 | 3.90 | 0.1923 | 16.51 | 4.1721 | 2.80 | ||
| 90 | 30.41 | 491.69 | 4.07 | 0.17069 | 4.8 | 1.6651 | 2.07 | ||
| 80 | 30.37 | 496.55 | 3.82 | 0.17129 | 3.92 | 1.5633 | 2.26 | ||
| 70 | 30.41 | 480.42 | 3.61 | 0.17819 | 3.71 | 1.5579 | 2.35 | ||
| 60 | 30.44 | 480.88 | 3.43 | 0.17851 | 3.62 | 1.4463 | 2.33 | ||
| LG03 | 50 | 30.88 | 30.48 | 495.02 | 3.76 | 0.16739 | 3.85 | 1.5345 | 1.65 |
| 40 | 30.54 | 492.51 | 3.86 | 0.16338 | 3.95 | 1.5042 | 1.53 | ||
| 30 | 30.6 | 493.95 | 4.14 | 0.16388 | 4.2 | 1.6635 | 1.58 | ||
| 20 | 30.73 | 497.38 | 4.95 | 0.19313 | 4.96 | 2.5082 | 1.65 | ||
| 10 | 31.18 | 486.93 | 4.52 | 0.14924 | 14.1 | 2.7819 | 2.65 | ||
| 90 | 31.25 | 459.39 | 4.21 | 0.1715 | 4.76 | 1.7413 | 2.10 | ||
| 80 | 31.22 | 461.43 | 3.36 | 0.1601 | 4.37 | 1.0751 | 2.37 | ||
| 70 | 31.21 | 467.46 | 3.48 | 0.17395 | 3.74 | 1.4256 | 2.27 | ||
| 60 | 31.22 | 466.49 | 3.53 | 0.1736 | 3.76 | 1.4251 | 2.28 | ||
| LG04 | 50 | 31.8 | 31.24 | 462.1 | 4.02 | 0.17255 | 3.76 | 1.8098 | 1.67 |
| 40 | 31.27 | 461.36 | 4.01 | 0.16519 | 3.94 | 1.6283 | 1.53 | ||
| 30 | 31.30 | 462.34 | 3.20 | 0.1527 | 4.79 | 0.93301 | 1.57 | ||
| 20 | 31.40 | 463.75 | 4.65 | 0.18473 | 5.21 | 2.1757 | 1.64 | ||
| 10 | 31.82 | 469.83 | 4.23 | 0.13732 | 14.01 | 2.9987 | 2.64 |
| Battery | SOC (%) | L | |||||||
| 10 | 34.46 | 470.15 | 4.38 | 0.24722 | 13.95 | 3.9242 | 2.31 | ||
| 20 | 34.31 | 474 | 3.68 | 0.24631 | 4.86 | 2.5783 | 1.6 | ||
| 30 | 34.32 | 474.07 | 3.69 | 0.2751 | 3.53 | 3.4651 | 1.52 | ||
| 40 | 34.25 | 475.98 | 2.97 | 0.24166 | 3.42 | 2.0166 | 1.74 | ||
| LG01 | 50 | 35.17 | 34.21 | 471.19 | 3.18 | 0.23648 | 3.63 | 2.1106 | 2.09 |
| 60 | 34.2 | 470.72 | 3 | 0.23176 | 3.66 | 1.8533 | 2.07 | ||
| 70 | 34.3 | 464.58 | 3.17 | 0.22409 | 3.76 | 1.9357 | 1.7 | ||
| 80 | 34.33 | 461.21 | 3.54 | 0.22834 | 4.03 | 2.2135 | 1.77 | ||
| 90 | 34.31 | 457.45 | 3.5 | 0.21421 | 5.58 | 2.2336 | 1.71 | ||
| 10 | 33.62 | 446.24 | 4.34 | 0.23464 | 14.76 | 4.0039 | 2.29 | ||
| 20 | 33.43 | 450.27 | 4.15 | 0.25904 | 4.63 | 3.3461 | 1.58 | ||
| 30 | 33.43 | 452.72 | 3.33 | 0.24237 | 3.59 | 2.3318 | 1.52 | ||
| 40 | 33.37 | 449.45 | 3.25 | 0.22934 | 3.64 | 2.087 | 1.7 | ||
| LG02 | 50 | 34.45 | 33.32 | 447.91 | 3.54 | 0.23246 | 3.5 | 2.5096 | 2.08 |
| 60 | 33.3 | 447.1 | 3.18 | 0.22511 | 3.66 | 1.8996 | 2.06 | ||
| 70 | 33.35 | 441.77 | 3.5 | 0.22536 | 3.56 | 2.2455 | 1.75 | ||
| 80 | 33.38 | 438.19 | 2.74 | 0.19386 | 4.38 | 1.2153 | 1.74 | ||
| 90 | 33.37 | 451.99 | 4.52 | 0.24856 | 5.04 | 3.4536 | 1.68 | ||
| 10 | 31.09 | 489.85 | 4.99 | 0.22245 | 10.4 | 3.6818 | 2.33 | ||
| 20 | 30.83 | 494.27 | 3.43 | 0.19534 | 4.8 | 1.6213 | 1.68 | ||
| 30 | 30.77 | 488.72 | 3.65 | 0.19079 | 3.87 | 1.7747 | 1.62 | ||
| 40 | 30.74 | 485.46 | 3.4 | 0.18028 | 3.84 | 1.4483 | 1.88 | ||
| LG03 | 50 | 31 | 30.67 | 487.89 | 2.11 | 0.16878 | 3.96 | 0.63426 | 2.12 |
| 60 | 30.66 | 485.13 | 3.17 | 0.17787 | 3.66 | 1.2994 | 2.04 | ||
| 70 | 30.72 | 479.05 | 3.31 | 0.16892 | 3.84 | 1.3108 | 1.71 | ||
| 80 | 30.75 | 480.36 | 3.44 | 0.18174 | 3.78 | 1.5759 | 1.86 | ||
| 90 | 30.71 | 477.52 | 4.26 | 0.19437 | 4.36 | 2.2802 | 1.67 | ||
| 10 | 31.64 | 470.56 | 4.42 | 0.19099 | 16.9 | 3.9463 | 2.35 | ||
| 20 | 31.48 | 470.95 | 4.85 | 0.2201 | 5.39 | 3.1217 | 1.56 | ||
| 30 | 31.4 | 473.72 | 4.04 | 0.20236 | 3.95 | 2.2992 | 1.68 | ||
| 40 | 31.35 | 471.8 | 2.42 | 0.16841 | 4.2 | 0.78514 | 1.8 | ||
| LG04 | 50 | 32.68 | 31.31 | 469.59 | 2.71 | 0.17051 | 4.08 | 0.9391 | 2.12 |
| 60 | 31.31 | 474.04 | 3.22 | 0.19627 | 3.57 | 1.5973 | 2.06 | ||
| 70 | 31.34 | 465.67 | 3.35 | 0.1785 | 3.73 | 1.4949 | 1.7 | ||
| 80 | 31.38 | 464.39 | 3.73 | 0.1844 | 3.96 | 1.7888 | 1.76 | ||
| 90 | 31.41 | 467.86 | 3.46 | 0.18651 | 4.35 | 1.9457 | 1.69 |
| Battery | SOC (%) | L | |||||||
| 90 | 12.19 | 127.7 | 2.96 | 0.14838 | 3.02 | 1.9264 | 1.91 | ||
| 80 | 12.18 | 128.64 | 2.99 | 0.14925 | 2.95 | 1.7723 | 2.03 | ||
| 70 | 12.22 | 123.27 | 2.86 | 0.15021 | 2.82 | 1.6021 | 1.98 | ||
| 60 | 12.21 | 127.87 | 2.78 | 0.14041 | 2.84 | 1.4092 | 1.93 | ||
| MCL01 | 50 | 12.76 | 12.27 | 124.19 | 2.63 | 0.14448 | 3 | 1.3045 | 1.83 |
| 40 | 12.23 | 129.51 | 2.69 | 0.14108 | 2.91 | 1.349 | 1.77 | ||
| 30 | 12.27 | 127.53 | 2.89 | 0.14477 | 3.11 | 1.4313 | 1.74 | ||
| 20 | 12.3 | 124.27 | 2.87 | 0.14921 | 3.14 | 1.5283 | 1.68 | ||
| 10 | 12.4 | 123.74 | 3.16 | 0.15457 | 3.64 | 1.9338 | 1.97 | ||
| 90 | 12.32 | 94.58 | 2.83 | 0.13917 | 3.22 | 1.8474 | 1.92 | ||
| 80 | 12.29 | 95.12 | 2.98 | 0.14524 | 3.1 | 1.6911 | 2.02 | ||
| 70 | 12.3 | 94.88 | 2.83 | 0.14501 | 2.86 | 1.6404 | 1.94 | ||
| 60 | 12.34 | 95.93 | 2.48 | 0.13526 | 3.2 | 1.1881 | 1.89 | ||
| MCL02 | 50 | 12.78 | 12.32 | 97.55 | 2.68 | 0.14322 | 2.91 | 1.4888 | 1.79 |
| 40 | 12.32 | 97.06 | 2.58 | 0.13936 | 3 | 1.2418 | 1.71 | ||
| 30 | 12.33 | 95.73 | 2.83 | 0.14179 | 3.28 | 1.499 | 1.73 | ||
| 20 | 12.37 | 98.06 | 2.75 | 0.1471 | 3.24 | 1.5932 | 1.66 | ||
| 10 | 12.44 | 97.97 | 3.05 | 0.14893 | 3.97 | 1.8782 | 1.97 | ||
| 90 | 12.73 | 112.93 | 2.88 | 0.15149 | 3.16 | 1.7869 | 1.91 | ||
| 80 | 12.7 | 113.23 | 2.55 | 0.14004 | 3.45 | 1.1063 | 2.06 | ||
| 70 | 12.72 | 113.18 | 2.76 | 0.14458 | 3.24 | 1.3804 | 1.96 | ||
| 60 | 12.75 | 114.47 | 2.23 | 0.14188 | 3.14 | 0.97923 | 1.9 | ||
| MCL03 | 50 | 13.19 | 12.76 | 114.33 | 2.94 | 0.16119 | 2.74 | 1.9954 | 1.82 |
| 40 | 12.74 | 113.87 | 2.86 | 0.15321 | 2.96 | 1.6035 | 1.73 | ||
| 30 | 12.77 | 114.98 | 2.98 | 0.1558 | 3.1 | 1.7348 | 1.79 | ||
| 20 | 12.8 | 115.57 | 3.02 | 0.16174 | 3.09 | 1.8559 | 1.62 | ||
| 10 | 12.86 | 114.67 | 3.72 | 0.17899 | 3.32 | 3.0123 | 1.89 | ||
| 90 | 12.27 | 110.09 | 2.35 | 0.13018 | 3.7 | 1.0107 | 1.96 | ||
| 80 | 12.25 | 111.65 | 3.09 | 0.1497 | 3.2 | 1.6986 | 2.1 | ||
| 70 | 12.27 | 110.12 | 2.83 | 0.14016 | 3.39 | 1.334 | 2.01 | ||
| 60 | 12.28 | 112.54 | 2.49 | 0.13854 | 3.2 | 1.1365 | 1.92 | ||
| MCL04 | 50 | 12.8 | 12.27 | 111.96 | 2.89 | 0.1482 | 2.94 | 1.5953 | 1.84 |
| 40 | 12.29 | 112.02 | 2.73 | 0.14128 | 3.3 | 1.2619 | 1.81 | ||
| 30 | 12.27 | 112.62 | 2.79 | 0.14323 | 3.31 | 1.3253 | 1.77 | ||
| 20 | 12.32 | 114.22 | 2.96 | 0.15357 | 3.41 | 1.5857 | 1.72 | ||
| 10 | 12.37 | 113.14 | 3.22 | 0.1474 | 4.19 | 1.6458 | 1.93 |
| Battery | SOC (%) | L | |||||||
| 10 | 12.44 | 127.69 | 3.5 | 0.16041 | 3.91 | 2.5303 | 1.97 | ||
| 20 | 12.37 | 123.65 | 3.22 | 0.15903 | 3.34 | 1.9775 | 1.7 | ||
| 30 | 12.33 | 123.16 | 2.78 | 0.14601 | 3.25 | 1.3636 | 1.74 | ||
| 40 | 12.31 | 127.87 | 2.82 | 0.14565 | 3 | 1.3831 | 1.8 | ||
| MCL01 | 50 | 13.7 | 12.28 | 127.65 | 2.52 | 0.13408 | 3.2 | 1.0172 | 1.9 |
| 60 | 12.27 | 126.8 | 1.47 | 0.12357 | 3.29 | 0.45992 | 2.09 | ||
| 70 | 12.29 | 125.84 | 2.65 | 0.13586 | 2.94 | 1.2557 | 1.83 | ||
| 80 | 12.28 | 127.24 | 2.85 | 0.14256 | 2.85 | 1.5845 | 1.82 | ||
| 90 | 12.27 | 125.7 | 2.84 | 0.13672 | 2.96 | 1.7427 | 1.73 | ||
| 10 | 12.48 | 96.43 | 3.61 | 0.16464 | 4.14 | 3.0663 | 1.89 | ||
| 20 | 12.41 | 97.55 | 3.1 | 0.15 | 3.27 | 1.8899 | 1.66 | ||
| 30 | 12.33 | 96.18 | 3.17 | 0.15212 | 2.87 | 2.1141 | 1.71 | ||
| 40 | 12.34 | 95.6 | 2.93 | 0.14508 | 3.1 | 1.5808 | 1.78 | ||
| MCL02 | 50 | 13.69 | 12.34 | 95.24 | 2.83 | 0.14004 | 3.09 | 1.4919 | 1.89 |
| 60 | 12.33 | 94.88 | 2.79 | 0.13887 | 2.9 | 1.4831 | 2.06 | ||
| 70 | 12.34 | 94.34 | 1.37 | 0.1225 | 3.33 | 0.48037 | 1.8 | ||
| 80 | 12.36 | 94.63 | 1.53 | 0.1241 | 3.36 | 0.5577 | 1.78 | ||
| 90 | 12.36 | 93.96 | 2.88 | 0.13771 | 3.32 | 1.8098 | 1.67 | ||
| 10 | 12.88 | 113.27 | 3.94 | 0.17241 | 4.05 | 2.9983 | 2.05 | ||
| 20 | 12.87 | 114.83 | 3.37 | 0.17392 | 3.1 | 2.4794 | 1.74 | ||
| 30 | 12.8 | 114.72 | 2.36 | 0.14214 | 3.22 | 1.0772 | 1.7 | ||
| 40 | 12.78 | 112.61 | 2.75 | 0.14392 | 3.18 | 1.3912 | 1.78 | ||
| MCL03 | 50 | 14.06 | 12.77 | 111.85 | 2.63 | 0.13862 | 3.19 | 1.1738 | 1.89 |
| 60 | 12.77 | 114.16 | 2.1 | 0.13627 | 2.98 | 0.86353 | 2.07 | ||
| 70 | 12.79 | 114.4 | 2.04 | 0.13671 | 2.96 | 0.88326 | 1.75 | ||
| 80 | 12.77 | 111.48 | 1.37 | 0.12773 | 3.38 | 0.47767 | 1.81 | ||
| 90 | 12.78 | 112.13 | 2.67 | 0.1439 | 3.01 | 1.6431 | 1.72 | ||
| 10 | 12.45 | 113.81 | 3.46 | 0.16651 | 3.98 | 2.2854 | 1.95 | ||
| 20 | 12.37 | 115.03 | 2.79 | 0.15239 | 3.38 | 1.5069 | 1.7 | ||
| 30 | 12.37 | 114.91 | 2.45 | 0.14681 | 3.18 | 1.1633 | 1.7 | ||
| 40 | 12.35 | 113.93 | 2.54 | 0.14354 | 3.19 | 1.1937 | 1.82 | ||
| MCL04 | 50 | 13.6 | 12.35 | 113.45 | 2.05 | 0.13807 | 3.27 | 0.78896 | 1.98 |
| 60 | 12.33 | 114.16 | 2.44 | 0.14425 | 2.88 | 1.2123 | 2.09 | ||
| 70 | 12.35 | 113.42 | 2.4 | 0.13905 | 2.84 | 1.2617 | 1.8 | ||
| 80 | 12.33 | 111.68 | 2.61 | 0.13576 | 3.08 | 1.2558 | 1.88 | ||
| 90 | 12.33 | 110.33 | 2.83 | 0.14168 | 2.93 | 1.7636 | 1.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Sundaresan, S.; Balasingam, B. Battery Parameter Analysis through Electrochemical Impedance Spectroscopy at Different State of Charge Levels. J. Low Power Electron. Appl. 2023, 13, 29. https://doi.org/10.3390/jlpea13020029
Wu Y, Sundaresan S, Balasingam B. Battery Parameter Analysis through Electrochemical Impedance Spectroscopy at Different State of Charge Levels. Journal of Low Power Electronics and Applications. 2023; 13(2):29. https://doi.org/10.3390/jlpea13020029
Chicago/Turabian StyleWu, Yuchao, Sneha Sundaresan, and Balakumar Balasingam. 2023. "Battery Parameter Analysis through Electrochemical Impedance Spectroscopy at Different State of Charge Levels" Journal of Low Power Electronics and Applications 13, no. 2: 29. https://doi.org/10.3390/jlpea13020029
APA StyleWu, Y., Sundaresan, S., & Balasingam, B. (2023). Battery Parameter Analysis through Electrochemical Impedance Spectroscopy at Different State of Charge Levels. Journal of Low Power Electronics and Applications, 13(2), 29. https://doi.org/10.3390/jlpea13020029