

Group Stable Matching Problem in Freight Pooling Service of Vehicle–Cargo Matching Platform

Abstract
1. Introduction
- (1)
- We introduced stable matching theory into the freight pooling matching problem on vehicle–cargo matching platforms, thereby improving platform matching efficiency, user satisfaction, and platform competitiveness. In the freight pooling transportation service scenario on vehicle–cargo matching platforms, cargo owners and vehicle owners submit relevant information such as transportation service requirements and carrying capacity to the platform. Within the carrying capacity range, a vehicle owner can provide transportation services to multiple cargo owners, with each cargo owner’s goods being allowed to be carried by only one vehicle owner. This constitutes a one-to-many stable matching problem under the vehicle–cargo matching platform.
- (2)
- Based on the characteristics of the freight pooling stable matching problem on vehicle–cargo matching platforms, we define the concepts of combination preferences and group stability based on combination preferences, establish a group stable matching model for the freight pooling business on vehicle–cargo matching platforms, and verify the stability of the model through theoretical proof.
- (3)
- Based on the characteristics of the model, an improved cutting-plane algorithm is designed to solve the model. The group stable matching model for the freight pooling business on vehicle–cargo matching platforms established in this paper is a mixed-integer linear programming model. Since the model is an NP-hard problem, the number of constraints reaches , which severely impacts the solution efficiency of the group stable matching problem for the freight pooling business on vehicle–cargo matching platforms. At the same time, the model has only m⋅n decision variables, which is much smaller than the number of constraints, indicating that the majority of the constraints are ineffective. Therefore, this paper introduces the cutting-plane algorithm and improves it for the specific problem at hand. This modification allows for the removal of most ineffective constraints during the solving process, using only a subset of the model’s constraints to obtain the same solution as the original model. This significantly improves solving efficiency and is highly suited to the characteristics of the model.
- (4)
- Finally, through simulation experiments, we validate the advantages of the group stable matching model proposed in this paper over traditional matching models from the perspectives of the platform, vehicle owners, and cargo owners. Additionally, we verify the efficiency improvement of the cutting-plane algorithm in solving the group stable matching problem for vehicle–cargo matching platforms. The results show that this method has strong practicality and promotion value, as it can accurately push matching solutions for vehicle–cargo matching platforms in real-world operations, enhancing the platform’s matching efficiency and core competitiveness.
2. Literature Review
2.1. Vehicle and Cargo Matching Platforms
2.2. Stable Matching Theory
2.3. Research Gap
- (1)
- Due to the high complexity of the freight pooling business on vehicle–cargo matching platforms, which involves matching the cargo of multiple cargo owners with vehicle owners, existing research predominantly focuses on the full-load business model of vehicle–cargo matching platforms. Research on the freight pooling business model, which can effectively improve transportation efficiency and vehicle utilization, is relatively scarce. This paper focuses on the freight pooling business on vehicle–cargo matching platforms, aiming to fill this research gap.
- (2)
- A review of the literature reveals that existing research predominantly focuses on pricing, route design, or the processing of basic information on vehicle–cargo matching platforms. However, the matching problem between vehicle owners and cargo owners on vehicle–cargo matching platforms is a critical task. It serves as a precursor to vehicle route planning and vehicle loading problems. Only by accurately matching vehicle owners with cargo owners can the matching efficiency of the platform be fundamentally improved. This paper focuses on the matching problem between vehicle owners and cargo owners in the freight pooling business of vehicle–cargo matching platforms. It fully considers user preferences and defines the concept of composite preferences, allowing the matching results to enhance user satisfaction.
- (3)
- While stable matching theory has been widely applied in areas such as one-to-one marriage stability matching, one-to-many admissions, medical resource allocation, and carpooling, research on one-to-many matching in the context of the freight pooling business on vehicle–cargo matching platforms remains a gap in the literature. This is primarily due to the fact that, compared to one-to-many stable matching problems with quantity constraints on one side, such as in university admissions [31] and medical resource allocation [33], the one-to-many stable matching problem in the freight pooling business of vehicle–cargo matching platforms involves quantity constraints on both sides (vehicle capacity constraints on the vehicle owner side and cargo capacity transportation demands on the cargo owner side). This significantly increases the complexity of the problem and the difficulty of solving it. To address this issue, this paper defines the concept of group stability based on composite preferences and establishes a group stable matching model for the freight pooling business on vehicle–cargo matching platforms. The stability of the model is then verified through theoretical proof.
- (4)
- Since the group stable matching model for the freight pooling business on vehicle–cargo matching platforms established in this paper is a mixed-integer linear programming model with relatively few decision variables but a large number of constraints, it significantly affects the solution efficiency of the group stable matching problem in the freight pooling business. This paper introduces the cutting-plane algorithm and improves it based on the characteristics of the problem. By utilizing only a subset of the constraints from the model, the algorithm achieves the same solution as the original model, significantly enhancing solution efficiency. This not only provides accurate matching solutions for vehicle owners and cargo owners but also effectively improves matching efficiency.
3. Problem Description, Model Setup, and Algorithm Design
3.1. Problem Description
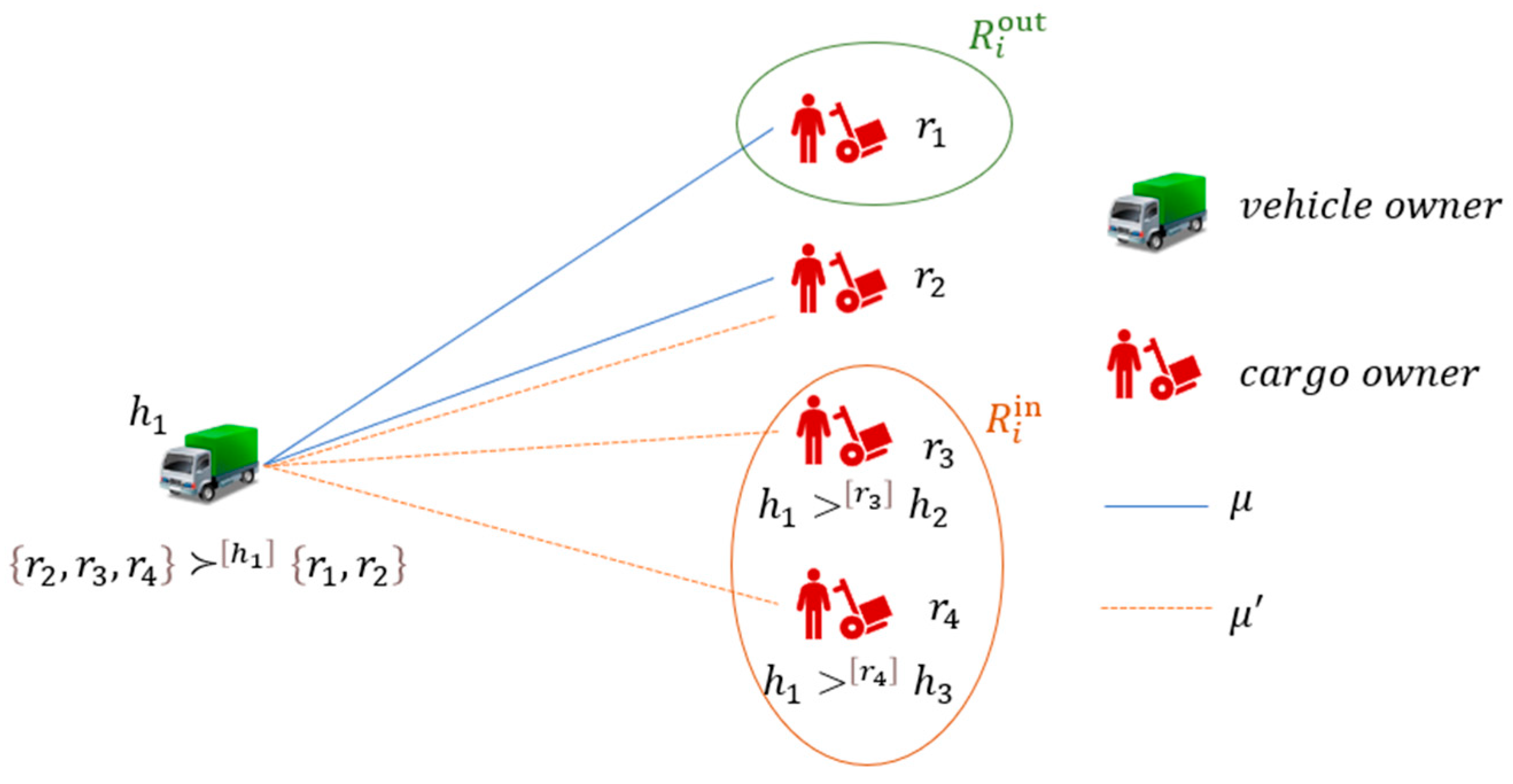
3.2. Group Stability Definition
3.3. Mathematical Model
- (1)
- , meaning that the transportation capacity of vehicle owner is sufficient.
- (2)
- ; that is, each cargo owner in must consider vehicle owner to be preferred over their current matching partner .
3.4. Cutting-Plane Method for Solving the Group Stable Matching Model Based on Combinational Preferences
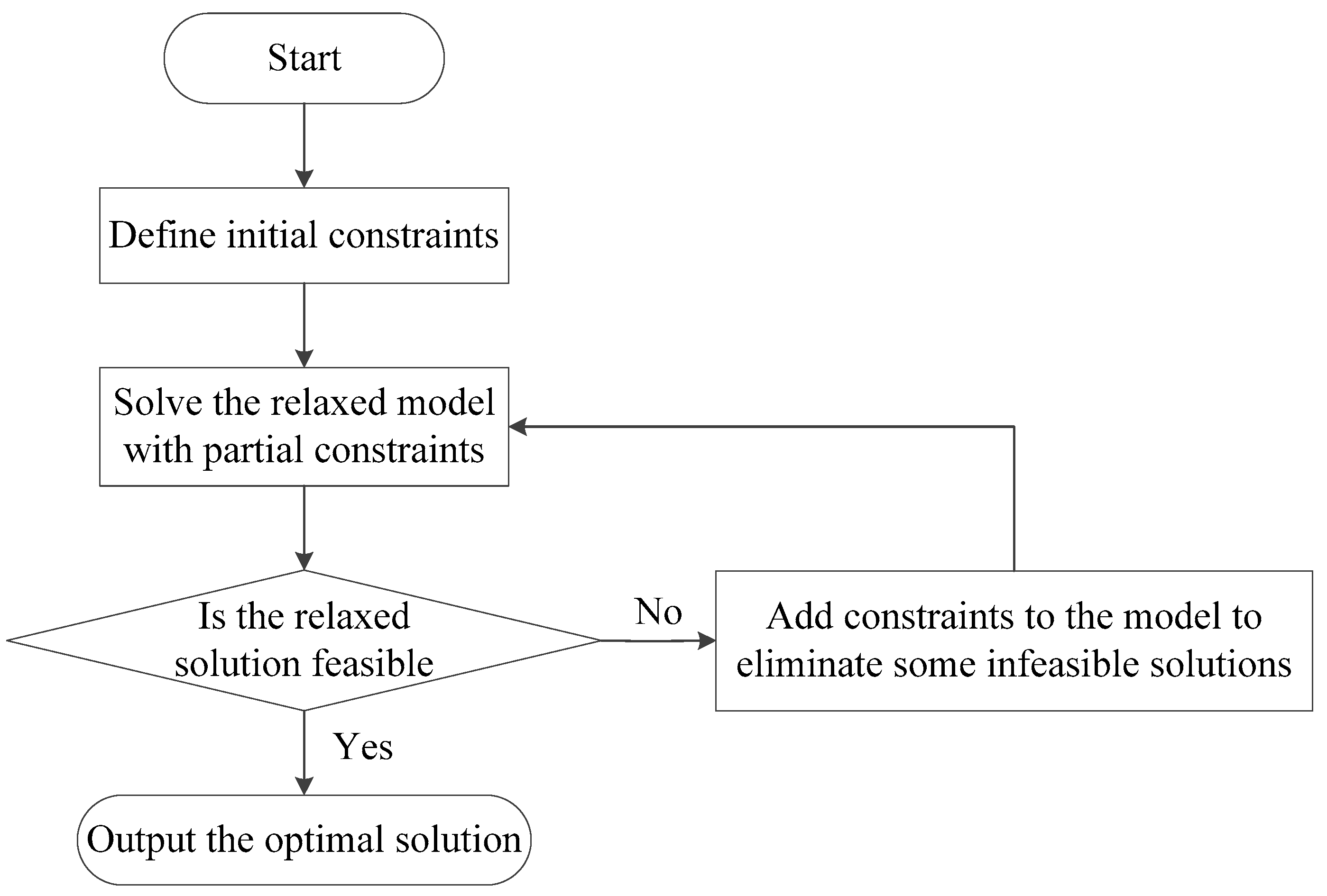
3.4.1. Introduction to the Cutting-Plane Method
- (1)
- How to determine the initial constraints;
- (2)
- How to determine the feasibility of the relaxed solution without checking all the constraints;
- (3)
- How to add effective cutting constraints when the relaxed solution is infeasible.
3.4.2. Selection of Initial Constraints
3.4.3. Feasibility Check of the Relaxed Solution
3.4.4. Method for Adding Cutting Constraints
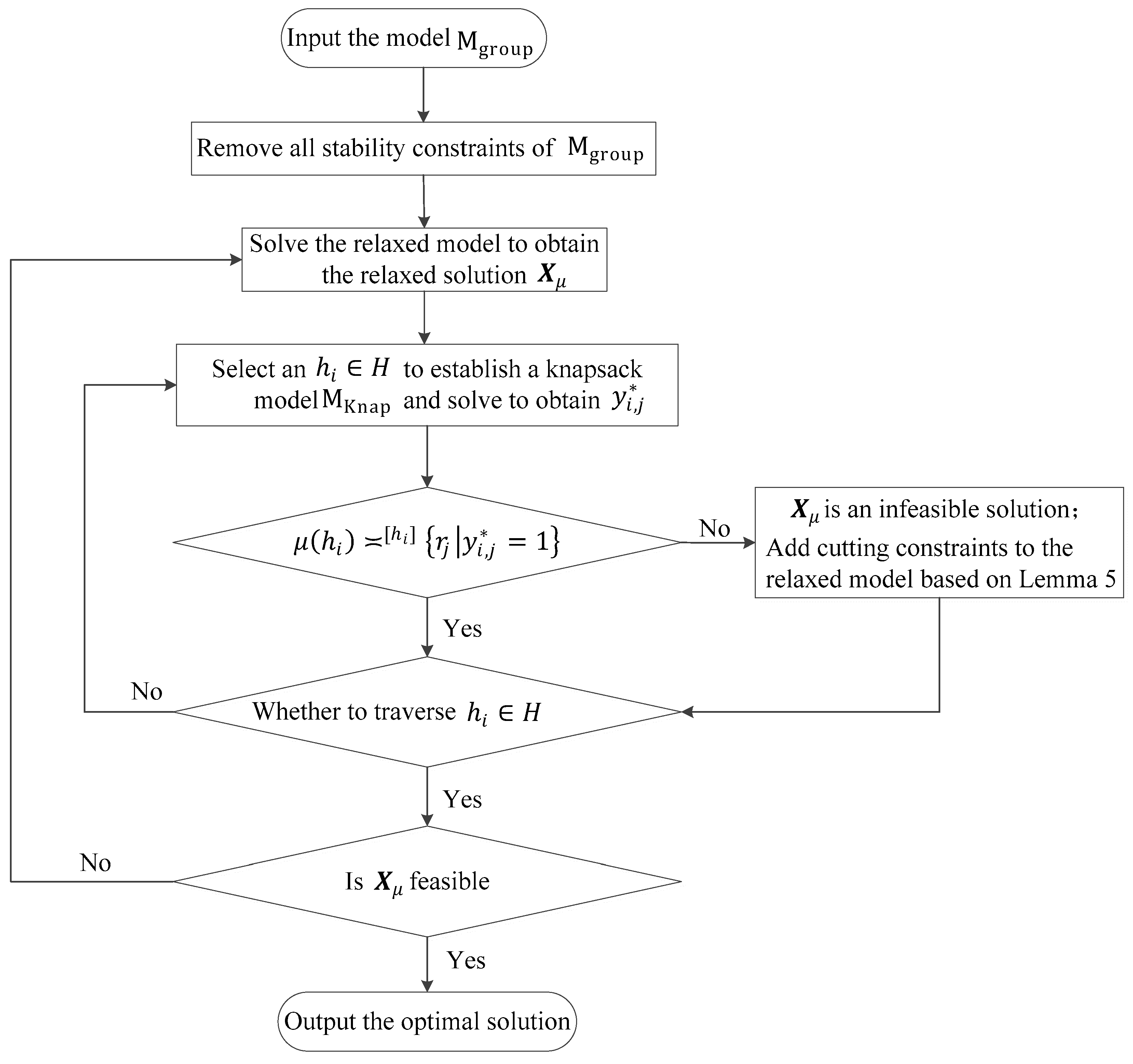
3.4.5. Cutting-Plane Method for Solving Group Stable Matching Models Based on Combinatorial Preferences
- (1)
- There are only a finite number of solutions in the solution space of model . Since the decision variables are binary (0–1 variables), the number of possible solutions in the solution space is no more than .
- (2)
- The cutting-plane method will never produce an infeasible solution for model . According to Lemma 4, by formulating and solving a knapsack model for each vehicle owner , the solution of provides a necessary and sufficient condition to determine the feasibility of the relaxed solution of model .
- (3)
- Infeasible relaxed solutions of model will not reappear repeatedly during the iterations. According to Lemma 5, at each iteration, constraints violated by infeasible relaxed solutions are added to the relaxed model. Therefore, these previously encountered relaxed solutions will not reoccur in the next iteration. Since the number of solutions is finite, the algorithm is guaranteed to terminate after a finite number of iterations.
- (4)
- The cutting-plane method will never produce a solution worse than the optimal solution of model . Throughout the entire algorithm, the constraints added to the relaxed model are all present in model . Therefore, the feasible region of the relaxed model is always at least as large as that of model , ensuring that the solution obtained by the cutting-plane method is never worse than the optimal solution of model .
4. Numerical Experiment
4.1. Example Parameters
4.2. Comparative Analysis of Matching Models
- (1)
- Vehicle owner can identify a blocking scheme that does not include cargo owner . In this case, cargo owner may be abandoned by vehicle owner , resulting in a loss of the corresponding commission revenue for the platform.
- (2)
- Another vehicle owner is able to identify a blocking coalition that includes cargo owner . In this case, cargo owner may reject the original matching and instead choose to match independently with vehicle owner to obtain a more satisfactory outcome, resulting in the platform losing the corresponding portion of its commission revenue.
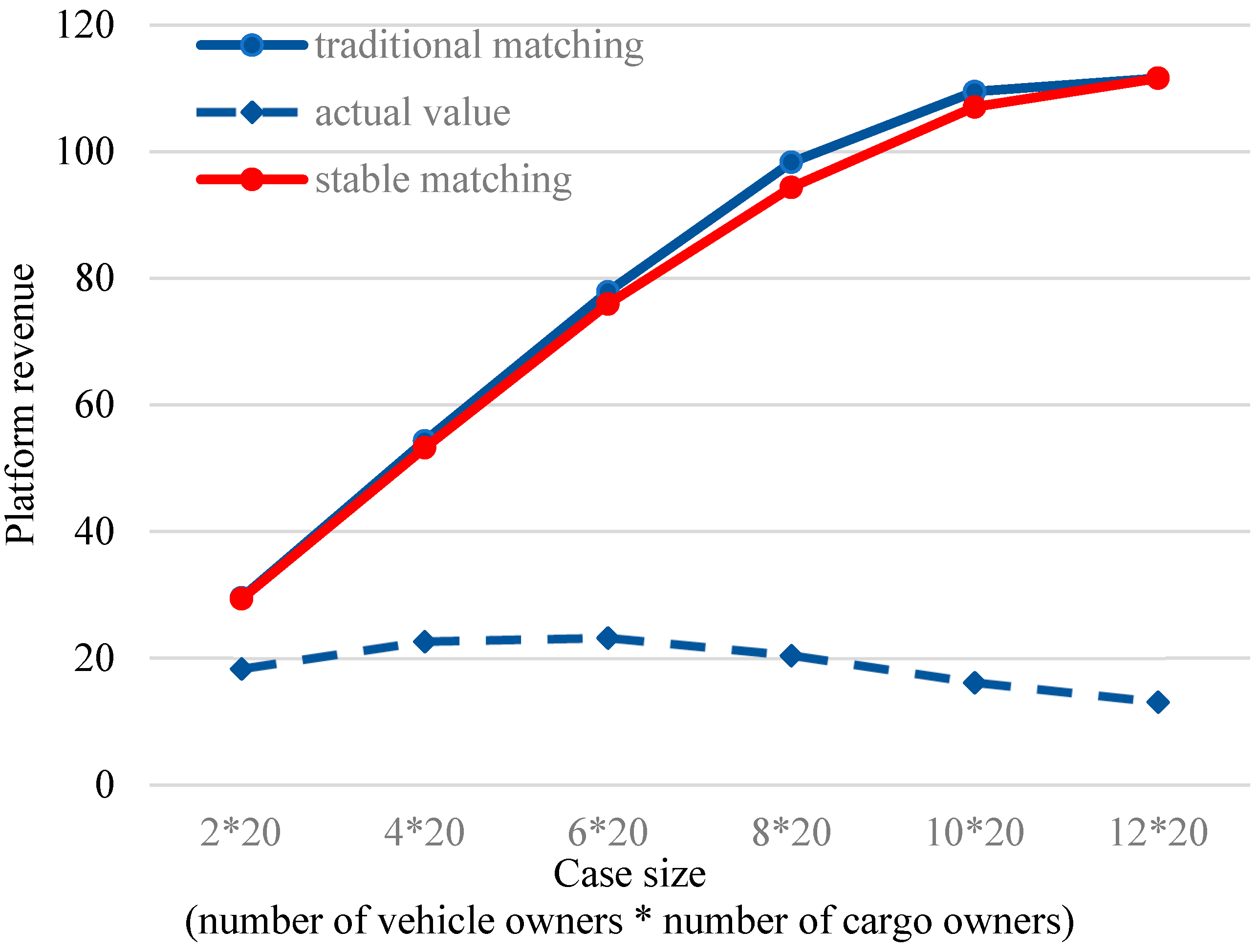
4.2.1. Comparison of Platform Revenue Under Different Supply/Demand Conditions and Matching Models
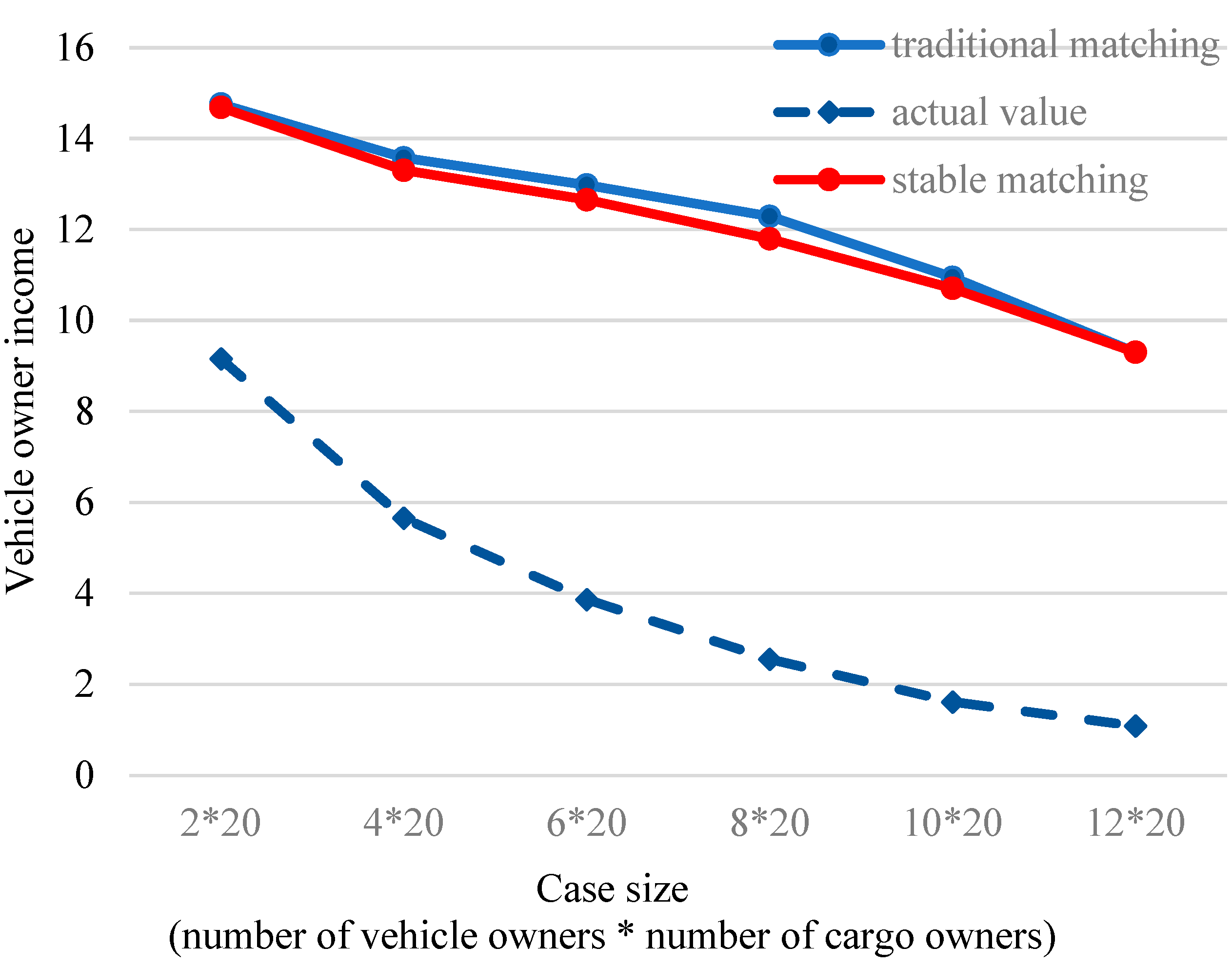
4.2.2. Comparison of Vehicle Owners’ Earnings Under Different Supply/Demand Conditions and Matching Models
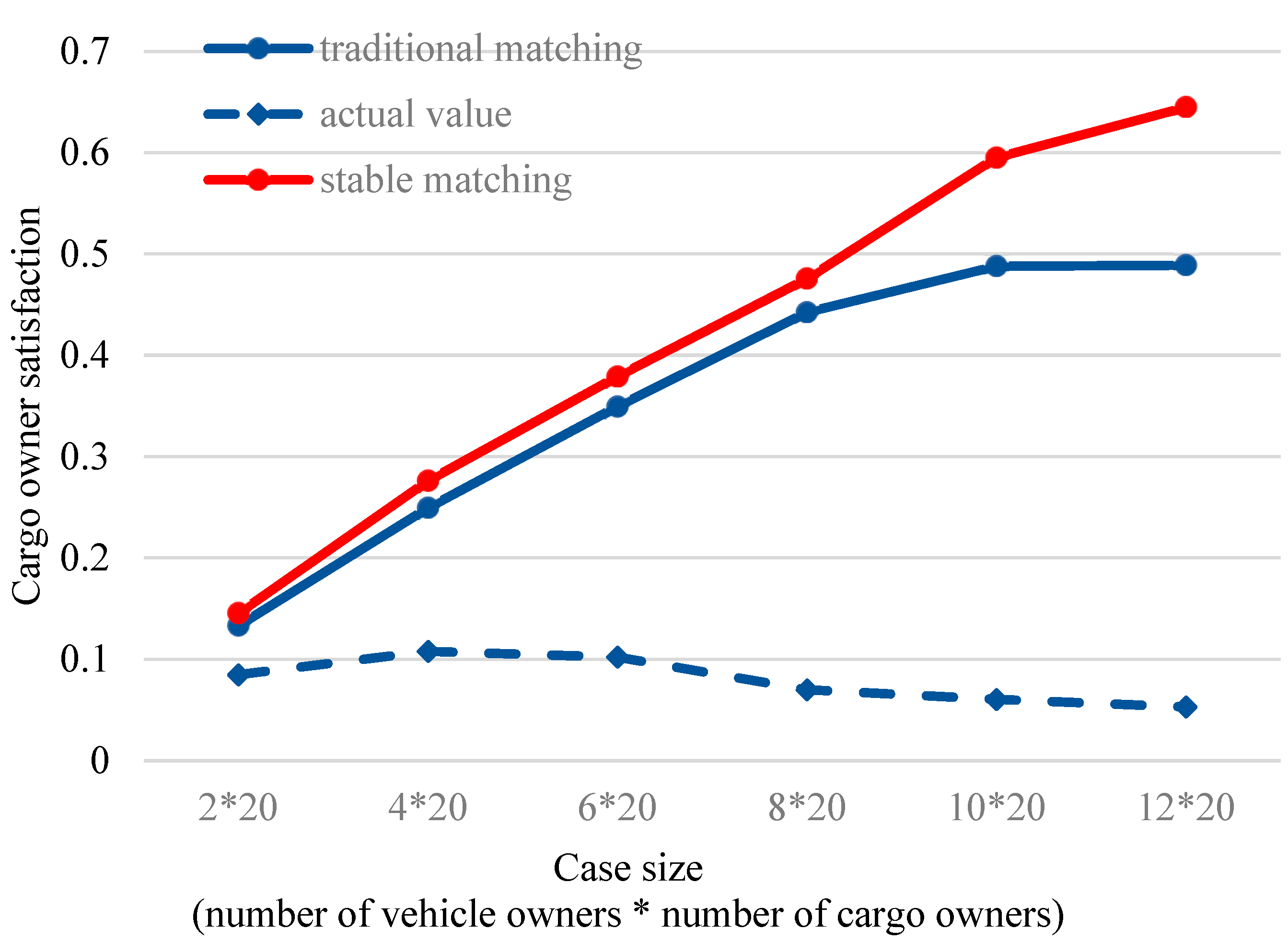
4.2.3. Comparison of Cargo Owners’ Satisfaction Under Different Supply/Demand Conditions and Matching Models
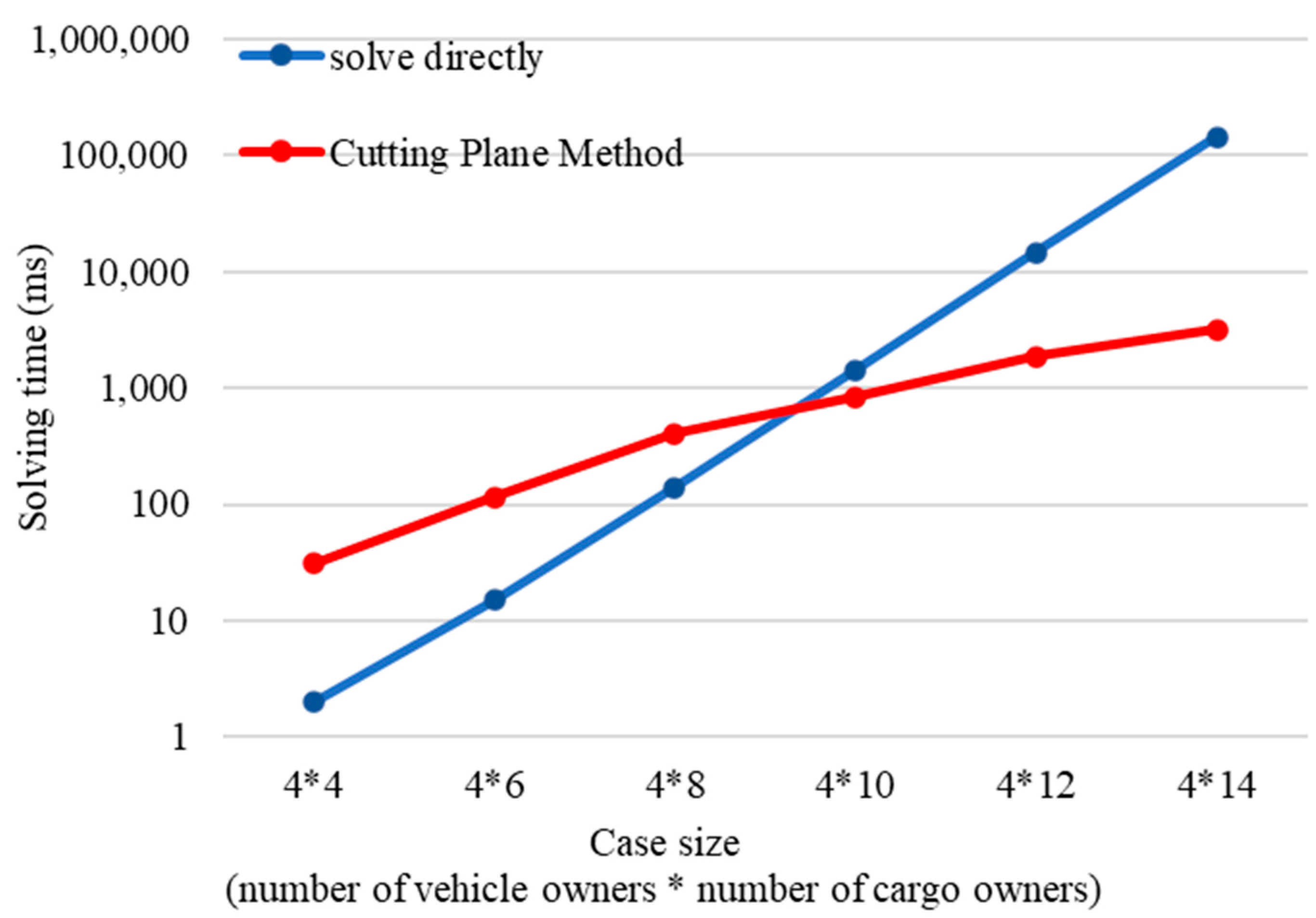
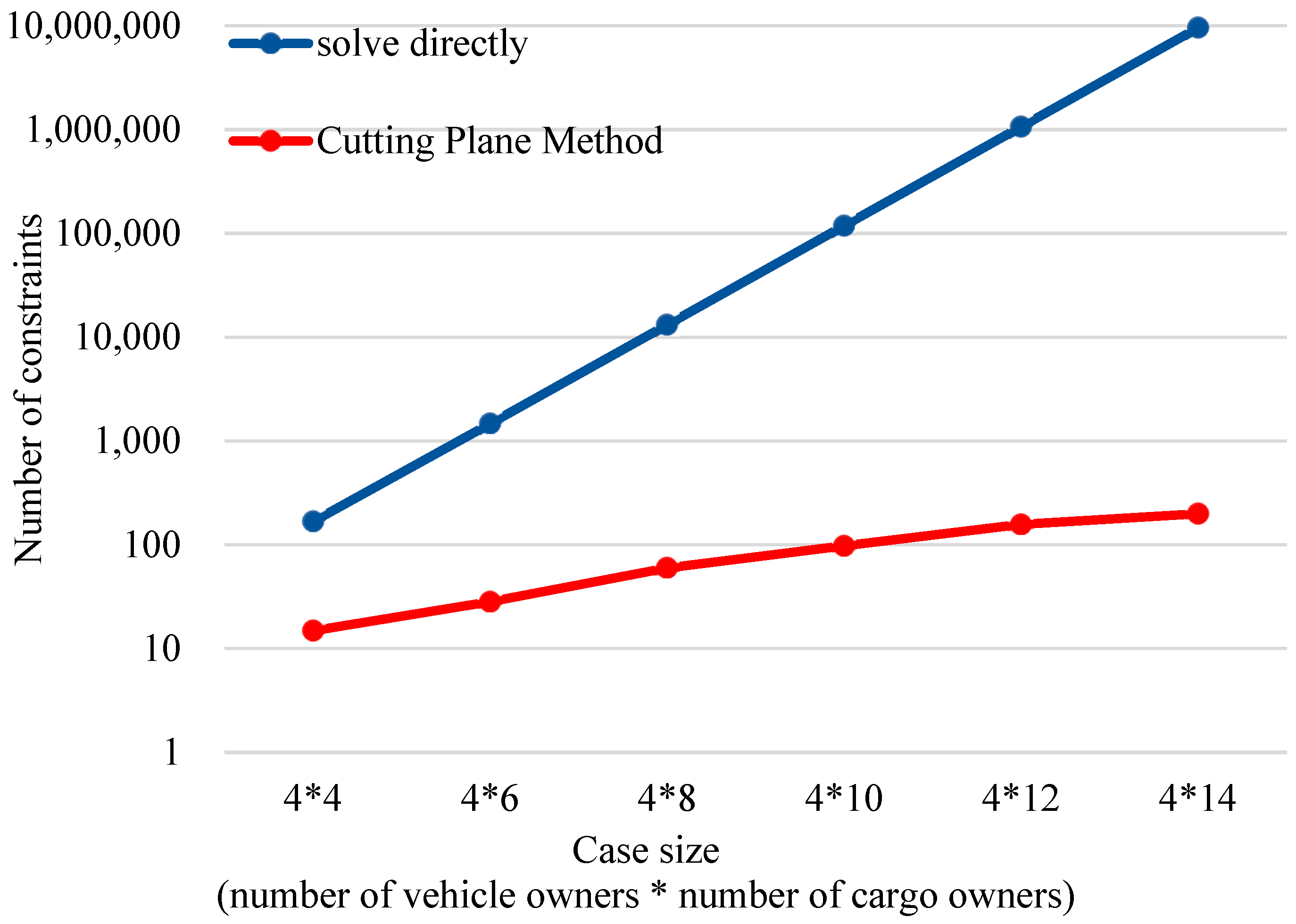
4.3. Efficiency Analysis of the Cutting-Plane Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, Y.; Huang, J.; Chen, X. The information value of logistics platforms in a freight matching market. Eur. J. Oper. Res. 2024, 312, 227–239. [Google Scholar] [CrossRef]
- Acocella, A.; Caplice, C.; Sheffi, Y. Elephants or goldfish?: An empirical analysis of carrier reciprocity in dynamic freight markets. Transp. Res. Part E Logist. Transp. Rev. 2020, 142, 102073. [Google Scholar] [CrossRef]
- Sun, Q.; Jiang, L.; Xu, H. Expectation-maximization algorithm of gaussian mixture model for vehicle-commodity matching in logistics supply chain. Complexity 2021, 2021, 9305890. [Google Scholar] [CrossRef]
- Bǎdicǎ, C.; Leon, F.; Bǎdicǎ, A. Freight transportation broker agent based on constraint logic programming. Evol. Syst. 2020, 11, 363–382. [Google Scholar] [CrossRef]
- Mallick, P.; Sarkar, S.; Mitra, P. Decision recommendation system for transporters in an online freight exchange platform. In Proceedings of the 2017 9th International Conference on Communication Systems and Networks (COMSNETS), Bengaluru, India, 4–8 January 2017; pp. 448–453. [Google Scholar]
- Wang, Z.; Li, Y.; Gu, F.; Guo, J.; Wu, X. Two-sided matching and strategic selection on freight resource sharing platforms. Phys. A Stat. Mech. Its Appl. 2020, 559, 125014. [Google Scholar] [CrossRef]
- Yang, B.; Han, K.; Tu, W.; Ge, Q. Fairness in online vehicle-cargo matching: An intuitionistic fuzzy set theory and tripartite evolutionary game approach. Appl. Soft Comput. 2024, 167, 112418. [Google Scholar] [CrossRef]
- Park, A.; Chen, R.; Cho, S.; Zhao, Y. The determinants of online matching platforms for freight services. Transp. Res. Part E Logist. Transp. Rev. 2023, 179, 103284. [Google Scholar] [CrossRef]
- Gale, D.; Shapley, L.S. College admissions and the stability of marriage. Am. Math. Mon. 1962, 69, 9. [Google Scholar] [CrossRef]
- Roth, A.E. The evolution of the labor market for medical interns and residents: A case study in game theory. J. Polit. Econ. 1984, 92, 991–1016. [Google Scholar] [CrossRef]
- Equi, L.; Gallo, G.; Marziale, S.; Weintraub, A. A combined transportation and scheduling problem. Eur. J. Oper. Res. 1997, 97, 94–104. [Google Scholar] [CrossRef]
- Kim, K.H.; Jun Chung, W.; Hwang, H.; Seong Ko, C. A distributed dispatching method for the brokerage of truckload freights. Int. J. Prod. Econ. 2005, 98, 150–161. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y. Optimization of Truck Load Matching Based on Grey Clustering. In Proceedings of the 2009 International Conference on Information Engineering and Computer Science, Wuhan, China, 19–20 December 2009; pp. 1–4. [Google Scholar]
- Van de Klundert, J.; Otten, B. Improving LTL truck load utilization on line. Eur. J. Oper. Res. 2011, 210, 336–343. [Google Scholar] [CrossRef]
- Li, J.; Zheng, Y.; Dai, B.; Yu, J. Implications of matching and pricing strategies for multiple-delivery-points service in a freight O2O platform. Transp. Res. Part E Logist. Transp. Rev. 2020, 136, 101871. [Google Scholar] [CrossRef]
- Kim, Y.; Chang, T. Deep Learning-Based freight recommendation system for freight brokerage platform. Systems 2024, 12, 477. [Google Scholar] [CrossRef]
- Deng, J.; Zhang, H.; Wei, S. Prediction of vehicle-cargo matching probability based on dynamic Bayesian network. Int. J. Prod. Res. 2021, 59, 5164–5178. [Google Scholar] [CrossRef]
- Shanthi, T.; Ramprasath, M.; Kavitha, A.; Muruganantham, T. Deep learning based autonomous transport system for secure vehicle and cargo matching. Intell. Autom. Soft Comput. 2023, 35, 957–969. [Google Scholar] [CrossRef]
- Chen, X.; Tang, W.; Hai, Y.; Lang, M.; Liu, Y.; Li, S. Optimization of truck–cargo matching for the LTL logistics hub based on Three-Dimensional pallet loading. Mathematics 2024, 12, 3336. [Google Scholar] [CrossRef]
- Janssen, M.; Verbraeck, A. Comparing the strengths and weaknesses of Internet-based matching mechanisms for the transport market. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 475–490. [Google Scholar] [CrossRef]
- Feng, M.; Cheng, Y. Solving truck-cargo matching for drop-and-pull transport with genetic algorithm based on demand-capacity fitness. Alex. Eng. J. 2021, 60, 61–72. [Google Scholar] [CrossRef]
- Roth, A.E.; Rothblum, U.G.; Vande Vate, J.H. Stable matchings, optimal assignments, and linear programming. Math. Oper. Res. 1993, 18, 803–828. [Google Scholar] [CrossRef]
- Iwama, K.; Manlove, D.; Miyazaki, S.; Morita, Y. Stable marriage with incomplete lists and ties. In Automata, Languages and Programming. Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1999; pp. 443–452. [Google Scholar]
- Wang, X.; Agatz, N.; Erera, A. Stable matching for dynamic Ride-Sharing systems. Transp. Sci. 2018, 52, 850–867. [Google Scholar] [CrossRef]
- Delorme, M.; García, S.; Gondzio, J.; Kalcsics, J.; Manlove, D.; Pettersson, W. Mathematical models for stable matching problems with ties and incomplete lists. Eur. J. Oper. Res. 2019, 277, 426–441. [Google Scholar] [CrossRef]
- Gale, D.; Sotomayor, M. Some remarks on the stable matching problem. Discrete Appl. Math. 1985, 11, 223–232. [Google Scholar] [CrossRef]
- Roth, A.E. The college admissions problem is not equivalent to the marriage problem. J. Econ. Theory 1985, 36, 277–288. [Google Scholar] [CrossRef]
- Baïou, M.; Balinski, M. The stable admissions polytope. Math. Program. 2000, 87, 427–439. [Google Scholar] [CrossRef]
- Sethuraman, J.; Teo, C.; Qian, L. Many-to-One stable matching: Geometry and fairness. Math. Oper. Res. 2006, 31, 581–596. [Google Scholar] [CrossRef]
- Klimentova, X.; Viana, A.; Pedroso, J.P.; Santos, N. Fairness models for multi-agent kidney exchange programmes. Omega 2021, 102, 102333. [Google Scholar] [CrossRef]
- Teo, C.; Sethuraman, J.; Tan, W. Gale-Shapley stable marriage problem revisited: Strategic issues and applications. Manag. Sci. 2001, 47, 1252–1267. [Google Scholar] [CrossRef]
- Ehlers, L. Truncation strategies in matching markets. Math. Oper. Res. 2008, 33, 327–335. [Google Scholar] [CrossRef]
- Xu, X.; Wang, C.; Zeng, Y.; Deng, X.; Wang, H.; Barklon, D.; Thibault, D. Matching service providers and customers in Two-Sided dynamic markets. IFAC-PapersOnLine 2015, 48, 2208–2213. [Google Scholar] [CrossRef]
- Alimudin, A.; Ishida, Y. Matching-Updating mechanism: A solution for the stable marriage problem with dynamic preferences. Entropy 2022, 24, 263. [Google Scholar] [CrossRef] [PubMed]
- Kurino, M. Credibility, efficiency, and stability: A theory of dynamic matching markets. Jpn. Econ. Rev. 2020, 71, 135–165. [Google Scholar] [CrossRef]
- Doval, L. Dynamically stable matching. Theor. Econ. 2022, 17, 687–724. [Google Scholar] [CrossRef]
- Sperisen, B.; Wiseman, T. Too good to fire: Non-assortative matching to play a dynamic game. Games Econ. Behav. 2020, 124, 491–511. [Google Scholar] [CrossRef]
- Gu, Y.; Saad, W.; Bennis, M.; Debbah, M.; Han, Z. Matching theory for future wireless networks: Fundamentals and applications. arXiv 2014, arXiv:1410.6513. [Google Scholar] [CrossRef]
- Pham, Q.; Leanh, T.; Tran, N.H.; Park, B.J.; Hong, C.S. Decentralized computation offloading and resource allocation for Mobile-Edge computing: A matching game approach. IEEE Access 2018, 6, 75868–75885. [Google Scholar] [CrossRef]
- Fenoaltea, E.M.; Baybusinov, I.B.; Zhao, J.; Zhou, L.; Zhang, Y. The Stable Marriage Problem: An interdisciplinary review from the physicist’s perspective. Phys. Rep. 2021, 917, 1–79. [Google Scholar] [CrossRef]
- Nemirovski, A. Introduction to Linear Optimization; World Scientific Publishing Co. Pte Ltd.: Singapore, 2024; ISBN 9811277907/9789811277900/9811278733/9789811278730. [Google Scholar]
- Grotschel, M.; Junger, M.; Reinelt, G. A cutting plane algorithm for the linear ordering problem. Oper. Res. 1984, 32, 1195–1220. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Notation | Physical Meaning |
|---|---|---|
| Platform | The commission rate that the platform takes from the payment made by the cargo owner to the vehicle owner | |
| Vehicle owner | Number of vehicle owners | |
| The -th vehicle | ||
| Set of vehicle owners, | ||
| The maximum transportation capacity of vehicle owner ’s vehicle | ||
| The transportation time rating of vehicle owner , ; the closer it is to 1, the better the rating | ||
| The quality assurance rating of vehicle owner , ; the closer it is to 1, the better the rating | ||
| Cargo owner | Number of cargo owners | |
| The -th vehicle | ||
| Set of cargo owners, | ||
| The transportation capacity required by the cargo owner | ||
| The payment that cargo owner is willing to offer | ||
| The payment that a vehicle owner receives when matched with cargo owner , | ||
| The importance level that cargo owner assigns to the attribute of the vehicle owner, | ||
| The importance level that cargo owner assigns to the attribute of the vehicle owner, | ||
| The satisfaction level of cargo owner with vehicle owner , | ||
| Vehicle–cargo matching | A one-to-many relationship between elements of the vehicle owner set and the cargo owner set . |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, L.; Huang, M. Group Stable Matching Problem in Freight Pooling Service of Vehicle–Cargo Matching Platform. Systems 2025, 13, 485. https://doi.org/10.3390/systems13060485
Kong L, Huang M. Group Stable Matching Problem in Freight Pooling Service of Vehicle–Cargo Matching Platform. Systems. 2025; 13(6):485. https://doi.org/10.3390/systems13060485
Chicago/Turabian StyleKong, Linlin, and Min Huang. 2025. "Group Stable Matching Problem in Freight Pooling Service of Vehicle–Cargo Matching Platform" Systems 13, no. 6: 485. https://doi.org/10.3390/systems13060485
APA StyleKong, L., & Huang, M. (2025). Group Stable Matching Problem in Freight Pooling Service of Vehicle–Cargo Matching Platform. Systems, 13(6), 485. https://doi.org/10.3390/systems13060485