Abstract
The trucking industry, a vital part of the economic structure, faces numerous challenges such as greenhouse gas emissions, labor-related issues, fluctuating fuel costs, and safety concerns. These challenges intensify as the industry expands to meet growing demand. The advent of artificial intelligence has led to the development of autonomous trucks, which are seen as a promising solution to these ongoing issues. This study is the first comprehensive review of literature on autonomous trucks, organized by theme and research method. Studies are initially categorized based on the timeline of the issues investigated, divided into two main subcategories: foundational aspects of autonomous truck implementation and practical implementation and economic analysis of autonomous trucks. Research on the foundational aspects of autonomous trucks is further divided into four categories: (1) Acceptance surveys, (2) Identification of barriers, (3) Core technologies for autonomous trucks implementation, and (4) Predictions of adoption rates. Research on practical and economical aspects of autonomous trucks falls into three subcategories: (1) Infrastructure, (2) Systemic performance optimization, and (3) Cost estimation. To enhance the accuracy of this review, a more detailed classification was conducted on two specific subcategories: core technologies for autonomous truck implementation and systemic performance optimization. Additionally, the studies were also categorized based on their research methods and assumptions, which include accurate descriptions of autonomous technology, data collection methods, assumptions about the study environment, the fuel type of autonomous trucks, and approach to analysis: simultaneous or separate. This comprehensive review of the literature offers a roadmap for researchers, aiding them in identifying unique and novel research topics, thereby propelling the advancement of autonomous trucks as a viable solution to numerous challenges in the trucking industry.
1. Introduction
Transportation systems play a vital role in our modern society, serving as essential mechanisms for the movement of both goods and people in response to diverse demands [1]. The landscape of these systems has dynamically evolved to address recent challenges such as escalating fuel prices and global supply chain disruptions, extreme events, and other sustainability aspects of transportation systems [2,3,4]. Freight transportation, notably, holds a crucial position in shaping product costs and influencing economic dynamics [5]. In the realm of freight transportation, trucks on roadways constitute a critical mode of transport, with trucks being responsible for 24.6% of freight transportation in Europe in 2021 [6] and 61.66% in the USA in 2020 [7]. Furthermore, the substantial revenue generated by the trucking industry, in addition to the extensive employment opportunities it provides, underscores its immense economic significance. More specifically, the global freight trucking market size was valued at $2577 billion USD in 2022 and is projected to reach $3446 billion USD by 2030 [8]. The revenue of the trucking industry, which includes payments received for services provided, constitutes 3% of the global GDP1 [9]. These statistics underscore the significant economic impact of the trucking industry. In addition, from an environmental perspective, transportation accounted for 29% of all energy consumed globally in 2015 [10]. Of this, road transportation used 75%, with trucking transportation accounting for a quarter of that [10]. As per the data provided by the International Energy Agency, trucks are responsible for nearly one-fifth of the global oil demand, which equates to approximately 17 million barrels per day. Furthermore, trucks account for about half of the global consumption of diesel [11]. These compelling statistics highlight the need to use advanced technologies as a strategy for enhancing truck performance. Primarily, it is imperative to conduct an evaluation of key facets within the trucking industry, such as drivers, energy efficiency, and safety measures. This assessment will help identify areas where the integration of new technologies can be applied to address potential challenges and formulate strategies for improvement.
In recent years, one of the boldest controversies within the realm of truck freight transportation revolves around the shortage of drivers. In 2021, the United States needed 80,500 truck drivers, and it is estimated that this number will rise to 162,000 by the year 2030 [12,13]. Nevertheless, the trucking industry grapples not only with a shortage of qualified drivers but also with retention issues. The challenge lies not just in attracting individuals to work in demanding roles for low wages but also in keeping them within the industry [14]. Following disruptions in the supply chain caused by COVID-19 quarantine measures, there was an initial increase in demand for new truckers. However, as conditions stabilized, the demand has decreased, leading to challenges for drivers in securing employment. Consequently, individuals who entered the trucking profession with the expectation of it being a reliable means of livelihood are now facing significant financial struggles, finding themselves in deep debt without available work opportunities. The main factors contributing to this circumstance, which presents a less than favorable environment for labor, are the rise in fuel prices resulting from Russia’s invasion of Ukraine and the impact of the COVID-19 pandemic on demand and supply chain dynamics [15]. Regardless of the perspective one adopts as more accountable, it inevitably leads to the inference that there are prevalent labor issues within the supply chain.
Apart from labor challenges in the trucking industry, there are significant challenges posed by energy consumption in the domain of trucking transportation. Many studies believe that the economic rebound following the 2021 pandemic, coupled with Russia’s invasion of Ukraine in February 2022, led to the first genuine global energy crisis [16]. This crisis precipitated an unparalleled escalation in the price of natural gas. This, in turn, led to an inflation in electricity costs, particularly in markets where power plants are predominantly dependent on gas. Simultaneously, oil prices have soared, reaching levels not seen since 2008. This contemporary crisis presents a stark contrast to the oil shocks of the 1970s. Those shocks, while significant, were not classified as a global crisis due to their limited association with oil, the then limited economic interconnections among countries, and a greater dependence on oil rather than gas. However, the current situation, characterized by its far-reaching impacts and global interconnectedness, has manifested as a comprehensive global crisis. In response, many governments are actively exploring strategies to mitigate their energy consumption. As previously mentioned, trucking transportation accounts for a substantial share of global energy consumption, underscoring the paramount importance of optimizing fuel efficiency within this domain.
To build upon the challenges facing the trucking industry, safety concerns emerge as a critical aspect deserving attention. According to the United States Federal Motor Carrier Safety Administration2, there are more than 168,000 truck accidents every year, approximately 32% of which result in injuries, and around 3% lead to fatalities [17]. In addition to direct costs such as vehicle and cargo damage, as well as medical expenses, there are also indirect costs linked to truck accidents. These include legal costs if the trucking company faces a lawsuit, higher insurance premiums, and loss of productivity due to the truck being out of service, which hinders revenue generation. Given the importance of human safety, the vulnerability of other vehicles in truck-related accidents, and the significant impact of truck transportation on the economy, many technicians and corporations have dedicated their efforts to mitigating truck accidents. This heightened focus stems from the recognition of the potential for substantial consequences, making the reduction in truck accidents a primary and urgent objective.
In response to the multifaceted challenges outlined above within the trucking industry—specifically, labor shortages, energy consumption issues, and safety concerns—the deployment of automation has emerged as a prominent and contemporary solution in recent years [18]. The first idea of an autonomous car originated in 1918, and the initial conceptual design was presented by General Motors in 1939 [19]. Many technicians believe that, due to traffic consistency and long distances, road freight transportation is the most suitable environment for the initial widespread adoption of autonomous vehicles [20]. Corporations such as Uber and Daimler AG are at the forefront of commercial autonomous trucks and are anticipated to achieve significant advancements in the near future [21,22]. Meanwhile, researchers have been drawn to the considerable attention surrounding automation in road transportation due to its complex nature. This includes (1) the environmental impacts of implementation, (2) the requirements for optimal performance, (3) the methods of operation, and (4) potential paths for improvement [23,24,25,26,27,28,29,30]. Moreover, several studies, categorized as literature reviews, have been instrumental in illuminating research gaps. For instance, a study partitioned the implementation environment of autonomous vehicle research into urban and non-urban areas, analyzing the short, medium, and long-term effects of autonomous transportation on urban areas and the environment [23]. In another comprehensive review, the current levels of autonomous vehicle deployment and the infrastructure prerequisites for their optimal operation were assessed [24]. The scholarly discourse on the operation of autonomous vehicles via shared platforms in another study has also been scrutinized [25]. Furthermore, scholarly investigations into diverse platforms for automation in road transportation, encompassing autonomous buses [26], taxis [27], and trucks [28], have also been meticulously reviewed. Findings on the infrastructure adaptations necessitated by the deployment of autonomous trucks were also evaluated in a different review study [28]. Another study scrutinized the technological prerequisites for these vehicles as presented in other works [29]. Lastly, studies that investigate the implications on fuel economy when autonomous trucks operate in platoons were probed in another review study [30].
Upon thorough examination of extant literature, a noticeable gap in the existing literature reviews on autonomous trucks becomes evident, particularly in the categorization of studies based on their objectives, research methodologies, and assumptions. Therefore, this paper endeavors to fill this gap by conducting an in-depth literature review on autonomous trucks classifying articles using thematic and research method categorizations. The aim is to examine these studies to comprehend the research trends and contributions in this field. Furthermore, this review aims to provide valuable guidance for researchers in their future explorations. To do so, we first define our strategy for conducting a literature search with the aim of identifying relevant sources. We then introduce the methodology employed for categorizing the levels of autonomy in this study. Following this, we present an overview of the resources, providing additional details on the years of publication, publishers, and types of sources. Finally, in the main section, we embark on a review of the literature, categorizing the studies based on thematic areas and research methodologies.
2. Review Methodology and Overview on Papers
2.1. Search Strategy
In this study, we curated articles with a primary focus on autonomous trucks. ‘Autonomous Trucks’ and ‘Driverless Trucks’ served as the foundational keywords in our literature search. The scope of autonomous trucks extended beyond road freight transportation, encompassing research on their utilization in mines and industry. To locate pertinent articles, we utilized search engines such as Google Scholar3, IEEE Xplore4, the MDPI publisher’s database5, and the TRB TRID database6.
2.2. Autonomy Level
In response to the need for precise referencing in regulations and policies, the Society of Automotive Engineers (SAE) has established a categorization system based on the level of automation technology. This system delineates six distinct levels, ranging from level 0 to 5. Vehicles that fall under levels 0, 1, and 2 are classified as ‘assisted’, indicating that some degree of human intervention is required. Conversely, vehicles that meet the criteria for levels 3, 4, and 5 are labeled as ‘autonomous’, signifying their capability to operate with minimal to no human input [31]. Each level is defined as follows:
- Level 0: This level offers warnings and momentary assistance, such as automatic emergency braking, blind spot warning, and lane departure warning.
- Level 1: This level provides either steering OR brake/acceleration support, such as lane centering or adaptive cruise control.
- Level 2: This level provides both steering AND brake/acceleration support, such as lane centering and adaptive cruise control.
- Level 3: This level involves driving the vehicle under limited conditions. The system will not operate unless all required conditions are met, similar to a traffic jam chauffeur. Note that at this level, if the system requests, manual driving is required.
- Level 4: This level is akin to level 3, but it will not request manual driving. An example would be a local driverless taxi.
- Level 5: This level is similar to level 4 but can be utilized in all circumstances.
A majority of the papers in this review study pertain to Level 4 or 5 as per the aforementioned definition. This will facilitate a deeper comprehension of the precise description of the autonomy level of trucks delineated in the papers, which is instrumental in categorization.
2.3. Overview of Papers
2.3.1. Distribution of Papers per Publishing Year and Type
In this study, we curated a total of 125 articles, spanning various years of publication. Figure 1 presents a categorization of the reviewed articles, organized by their respective years of publication. Additionally, we classified the articles based on their type into categories such as journal articles, conference articles, reports, theses, and books. The results of this classification are depicted in Figure 2.
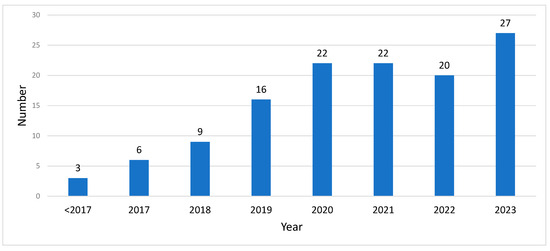
Figure 1.
The annual publication of peer-reviewed research studies, reports, theses, and books.
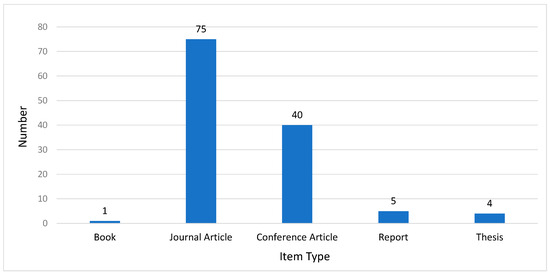
Figure 2.
Distribution analysis of item types in reviewed articles.
2.3.2. Distribution of Papers per Publisher/Journal/Conference
Table 1 provides a summary of the distribution of papers, considering only those publishers that have contributed more than five papers to our categories. In a similar vein, Table 2 takes into account the specific journals or conferences where our resources were published, mentioning only those that have published more than two of our papers. An almost uniform distribution is observed among the journals/conferences in our sources, making our findings more reliable and less biased.

Table 1.
Number of papers per publisher.
Table 2.
Number of papers in journals and conference proceedings.
2.4. Literature Limitations
As delineated in Section 2.2, the classification of autonomy levels conforms to the standards prescribed by the Society of Automotive Engineers (SAE), which categorizes each level based upon the degree of interaction between the driver and the vehicle. This regulatory framework is universally applicable to a diverse array of vehicle types, encompassing trucks of varying dimensions, buses, passenger cars, and beyond. A notable limitation identified in the literature is the absence of specific regulations that distinctly characterize autonomy levels for trucks.
3. Thematic Categorization in the Literature Review
3.1. Thematic Categorization
Every emerging technology requires thorough examination and study. The technology of autonomous trucks, being in its aborning stage, has prompted a multitude of studies focusing on its feasibility and detailed examination prior to widespread adoption. Another set of studies has emerged to address performance optimization and analysis issues that surface with increased usage of this technology. Consequently, in this comprehensive research, we have bifurcated the studies conducted on autonomous trucks into two primary categories:
- Studies addressing challenges and considerations related to the emergence of autonomous trucks and foundational issues, which are labeled as foundational aspects of autonomous truck implementation.
- Studies addressing issues and opportunities that arise following the emergence of autonomous trucks, with a focus on improving implementation quality. This falls under the category of practical implementation and economic analysis of autonomous trucks.
The thematic categorization is visually represented in Figure 3. Detailed definitions of all subcategories are provided in the subsequent sections.
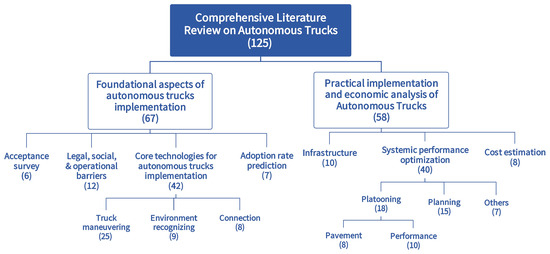
Figure 3.
Hierarchical tree diagram illustrating thematic categorization and corresponding paper counts for each topic.
3.1.1. Foundational Aspects of Autonomous Truck Implementation
Studies within this category are designed to establish necessary conditions for the emergence of autonomous trucks, either through technological advancements or by understanding their societal impacts. Consequently, we have identified two distinct subdivisions within this classification:
- Core Technologies: This subdivision focuses on the enhancement of technology and design aspects of autonomous trucks. In the initial stages of autonomous truck adoption, there is a pronounced necessity for technological advancements. Initially, the priority must be on developing and implementing feasible innovations rather than on societal impacts. However, as the deployment and testing of autonomous truck prototypes advance, a transition from a focus on technological development to community engagement is anticipated. This comprehensive literature review categorizes the research on autonomous trucks into three primary subcategories: truck maneuvering, environmental recognition, and connectivity. These categories will be meticulously examined in the subsequent sections. A thorough analysis of the data presented in Figure 3 underscores that truck maneuvering is the most emphasized core technology in the foundational aspects of autonomous truck implementation. Specifically, 25 out of 42 reviewed studies concentrated on the development of algorithms aimed at achieving smoother and more optimized maneuvers under diverse conditions. Detailed recommendations regarding these subcategories will be provided in the ensuing sections.
- Community Engagement: This subdivision aims to gather insights from the target community, which includes drivers, company owners, and policymakers. Changes in transportation significantly impact the supply chain. While some studies in the reviewed literature have devoted efforts to examining this facet, only 25 out of 67 articles on foundational aspects addressed these effects. In total, only 20% of the studies have focused on analyzing impacts, barriers, and adoption rates. As has been previously established, policymaking is as crucial as the technical aspects of new technology. Therefore, it is imperative to suggest more investigations into community engagement within foundational aspects. In this study, only 25 research papers could be classified under community engagement, with three categories created to differentiate them. However, critical gaps in the literature remain evident. Notably, there is a significant lack of research focused on policymaking to facilitate the implementation of this new technology. Although this gap can be considered a practical implementation issue, its foundational aspect is discussed here. The introduction of autonomous trucks is expected to cause substantial disruptions in the foundational aspects of the supply chain, raising serious questions.
These studies have been categorized based on their primary objectives, providing a comprehensive overview of the current state of research in the field of autonomous trucks.
Acceptance Survey
Research within this category is designed to understand the target community’s viewpoint on autonomous truck technology, primarily utilizing questionnaires as a tool for data collection. The sentiments of drivers and freight company owners, being key stakeholders, are of utmost importance. Gaining insights into the perceived pros and cons of autonomous trucks from these stakeholders is essential. This information plays a significant role in shaping marketing strategies and policymaking, with the ultimate goal of fostering the adoption of this technology.
Despite the acknowledged importance of this research field, a scant 6 out of 125 articles have concentrated on this subject. This dearth of research highlights a significant void in the literature, as comprehending the viewpoints of the community impacted by autonomous truck technology is critical for steering the future direction of freight transportation. In the absence of extensive surveys, policymakers and decision-makers run the risk of misinterpreting the reactions of truck drivers, company stakeholders, owners, and other road users to this novel technology. Launching a product without assessing customer expectations and considering the perspectives of those affected may lead to substantial challenges that we are ill-prepared to tackle.
In the wake of the introduction of prototype autonomous trucks by leading firms, capable of efficiently traversing extensive distances within heavily trafficked environments, the imperative to evaluate trust and acceptance among the affected populace has escalated. This evaluative phase now demands heightened and more frequent scrutiny than previously necessitated. It is crucial that surveys comprehensively acknowledge and confront the barriers to acceptance. These challenges should be rigorously examined by interdisciplinary experts, encompassing both technical and sociocultural perspectives, to facilitate thorough analysis and drive progressive reforms.
Smaller companies are anticipated to be significantly impacted by the adoption of autonomous trucks. Therefore, it is highly recommended to conduct surveys to capture the opinions of small company owners regarding the potential transition from independent ownership to becoming stakeholders in larger entities. A thorough analysis of various management scenarios within autonomous freight transportation systems is crucial. This analysis should be conducted with sensitivity to avoid serious disruptions, such as investment migration, which could result in insufficient funding for maintaining supply chains. We foresee this as a critical phase in policymaking that warrants more comprehensive attention than what has been observed in the existing literature.
Legal, Social, and Operational Barriers
These studies are dedicated to identifying and scrutinizing the legal, social, and operational challenges associated with the use of autonomous trucks. Predominantly, these studies employ interviews with technical and scientific experts to gather in-depth insights. Recognizing these obstacles is the initial step towards creating conductive conditions and mitigating these challenges. This category of articles is instrumental in addressing this critical aspect.
Less than 10% of the reviewed literature pertains to this subject. The existing research primarily focuses on identifying barriers that must be overcome to successfully implement autonomous trucks in freight transportation. However, further investigation is warranted to delve deeper into these challenges.
In the current landscape, with an abundance of accessible technologies, effective policymaking and the continuous evolution of autonomy are crucial. Consider the scenario of a fully equipped autonomous truck functioning seamlessly, yet unable to operate due to regulatory gaps related to potential accidents or ambiguities in road rights. Such regulatory hurdles can significantly impede progress.
Moreover, the lack of adequate parking facilities and essential infrastructure at transportation hubs poses practical challenges for autonomous trucks. These issues must be proactively addressed to ensure smooth operations. Additionally, the transition to autonomous vehicles has implications for the driver community as job displacement becomes a reality. Anticipating and planning for these impacts is crucial, necessitating consultation with experts across technical and social domains.
Another significant gap identified in the literature is the insufficient analysis of barriers encountered by technicians who hold policymaking and political responsibilities, in addition to the perspectives of technical experts already considered. These barriers are not confined to technical challenges alone. As depicted in Figure 3, the technological aspects of autonomy have already received considerable attention. However, the formulation and enforcement of regulatory frameworks constitute a critical and complex task that must be addressed before the global implementation of autonomous systems. Thus, we advocate for a more comprehensive examination of this aspect within the literature, with a particular emphasis on the political and regulatory dimensions. This approach will ensure a holistic understanding and facilitate the development of robust policies for the successful deployment of autonomous technologies worldwide.
Core Technologies for Autonomous Truck Implementation
A substantial body of research is dedicated to the technical aspects of autonomous trucks. A comprehensive review of technical and design elements serves as an essential prerequisite for their effective utilization. Consequently, we have categorized this research under the foundational domain. Studies within this category seek ways to advance truck technology to a level where practical implementation becomes feasible. The operation of autonomous trucks can be distilled into three primary features: (1) This involves navigating through traffic, overtaking other vehicles, and avoiding accidents using optimal strategies; (2) Autonomous trucks must recognize other vehicles, lanes, ramps, boundaries, and obstacles to make informed decisions; and (3) Establishing communication links between trucks and infrastructure is essential for accessing vital information.
The category focused on the technical aspects of developing new autonomous truck technology represents a foundational step. Given its prominence—accounting for over 30% of the literature volume—we have further subdivided the studies within this section into several critical subcategories:
- Truck maneuvering
We have categorized studies that focus on enhancing truck route change algorithms under varying conditions into this section. The primary objectives of these studies are to increase safety measures, minimize costs, and expedite maneuvering.
A significant portion of the technical analyses in the existing literature, approximately 60%, has been dedicated to route maneuvering, a primary operational facet of autonomous technology. With the advent of prototypes, it can be inferred that the current state of algorithms has achieved a level of maturity suitable for practical implementation. We anticipate a shift in research focus from this area to other critical aspects of autonomous technology.
It is imperative that future research efforts investigate maneuvering in complex, unbounded environments such as parking lots, gas stations, and transportation hubs. While the majority of studies have concentrated on road performance, which is crucial at the initial stages of development, a comprehensive understanding of autonomous vehicle behavior in these intricate environments is essential for achieving full automation and eliminating the need for human labor. Such investigations will be instrumental in advancing the robustness and versatility of autonomous systems, ensuring their effective deployment across a variety of operational contexts.
- 2.
- Environment recognizing
Some studies are specifically aimed at recognizing environmental factors and obstacles, such as potholes, uneven road surfaces, vehicles, road lines, or unmarked routes. We have categorized the studies that introduce sensors, cameras, or algorithms to enhance environmental recognition into a separate category.
The critical role of this subcategory in ensuring the regulatory compliance and quality assurance of autonomous trucks cannot be overstated. A significant shortcoming in the literature is evident, with only 9 out of 125 reviewed articles evaluating this subcategory and approximately 21.4% of technology-related studies addressing these methods and tools. To bridge this gap, we strongly advocate for the development and implementation of advanced methodologies for automatic positioning in specific environments such as fueling stations, loading docks, and unloading areas. These methodologies must incorporate sophisticated recognition systems tailored to these environments, a factor that has been largely neglected in current research. Addressing this deficiency is essential for the comprehensive integration and operational efficiency of autonomous truck technologies.
- 3.
- Connecting
Another subset of studies within the core technologies section is dedicated to enhancing communication between trucks and the requisite infrastructure. The focus of these studies is on improving aspects such as processing speed, security, and overall performance.
A notable gap identified in the current literature is the strategic analysis and conceptual frameworks for the future control and monitoring of autonomous trucks. The operational mechanisms for managing these vehicles remain ambiguous: it is unclear whether autonomous trucks will be overseen by independent corporations managing distinct fleets or integrated into centralized systems coordinated through unified servers. The requisite technologies for these connectivity solutions must be comprehensively reviewed and standardized to enhance performance and interoperability. We strongly recommend and anticipate a significant increase in scholarly investigations into this domain, given its critical importance for the effective and efficient deployment of autonomous transportation systems.
Adoption Rate Prediction
Determining the timeline for when autonomous trucks will supersede conventional trucks is crucial for policymaking in related sectors. As such, we have segregated the studies conducted for this purpose into a distinct category. Out of the 125 reviewed research articles, only 7 delve into this essential subject. This adoption rate will significantly influence the future market dynamics of autonomous trucks.
Preparedness for the anticipated demand becomes a strategic imperative. While quality remains paramount, addressing the low adoption rate despite sufficient quality is essential. Conversely, high demand coupled with a limited production rate may lead to pricing challenges. Accurate predictions in this regard are vital for informed decision-making.
Looking ahead, it is anticipated that this category, along with other foundational areas such as understanding barriers and conducting acceptance surveys, will receive heightened attention compared to mere literature reviews.
We strongly advocate for future research to focus not only on a meticulous analysis of the projected timeline for the global dissemination of autonomous trucks but also on developing strategies to expedite the preparatory phases. By proposing methodologies that streamline these preliminary stages, the transition to widespread adoption can be significantly accelerated. Such detailed investigations are imperative for bridging the gap between current technological advancements and their large-scale, practical implementation.
Findings from these categorizations are presented in Table 3.
Table 3.
Thematic categorizing results for those that insist on foundational aspects of Autonomous Trucks (ATs) implementation.
3.1.2. Practical Implementation and Economic Analysis of Autonomous Trucks
Upon meeting the requisite conditions for the emergence of autonomous trucks, aspects such as cost, optimization, and performance evaluation gain prominence. In this comprehensive review, we endeavored to identify commonalities among the research within this category and subsequently classify them into suitable subcategories.
This primary category focuses on enhancing the implementation of existing autonomous trucks. The studies within this domain address essential infrastructure modifications, ranging from pavements and bridges to parking lots and hubs. Additionally, researchers delve into cost estimations, seeking ways to reduce expenses associated with autonomous truck deployment. Furthermore, optimization strategies are explored to enhance systemic performance within freight transportation systems that incorporate autonomous trucks alongside conventional vehicles.
Of the 125 studies reviewed, 58 specifically concentrate on this implementation-focused category. This balanced attention between practical and foundational aspects underscores the importance of addressing real-world challenges. The diverse distribution of topics and categorization within this category contributes to robust and validated research outcomes.
Infrastructure
Recognizing that operating autonomous trucks alongside manual vehicles within the same platform may squander their potential, we encounter multifaceted challenges. These challenges span from increased pavement damages and heightened fatigue due to platooning, to disruptions in transportation hubs arising from disharmony between manual and driverless trucks, potentially leading to collisions.
Addressing these long-tail infrastructure adaptation needs is imperative. As we delve into the implementation of autonomous trucks, we must concurrently assess and mitigate these issues. Surprisingly, despite their significance, only 10 out of the 125 reviewed articles specifically focus on this expansive area. It is reasonable to attribute this scarcity to the early phases of technology development, where attention gravitates toward technical aspects. However, we anticipate a shift as we move beyond the technical phase. In the future, we expect greater emphasis on this field, recognizing its depth and the need for more comprehensive studies.
These studies aim to evaluate the infrastructure requirements and assess the adequacy of current resources in the context of autonomous trucks. Specific needs, such as charging stations for electric autonomous trucks, the feasibility of designating separate routes for platoon movement, and the resilience of bridges against the live load of truck platoons, are among the considerations. These aspects are critical in understanding the broader implications of integrating autonomous trucks into our transportation systems.
This field is poised to receive increased attention in the future, driven by the shift in focus within the domain of autonomous technology from the development of autonomous trucks to their implementation. We recommend that future research concentrate on the requirements and design of environments adaptable to autonomous trucks. Specifically, the analysis of dedicated lanes for these trucks, operating as platoons, represents a promising area that could significantly enhance operational efficiency. Investigating these aspects will be crucial for advancing the implementation and functionality of autonomous freight systems.
Systemic Performance Optimization
Research in this category is centered on the implementation of new policies and initiatives aimed at enhancing the overall performance of autonomous systems. Given the considerable volume and diversity of these studies, we have further subdivided this category into three distinct subcategories. Consider that these categories operate under the important assumption that studies are seeking ways to improve the implementation of autonomous trucks. Route and freight assignment, which can be collectively termed as planning, along with functional policies such as platooning, fall within this category. Notably, one-third of the reviewed studies (40) are categorized as systemic performance optimization, indicating a concentrated focus in this area. Systemic performance optimization is a crucial facet of any transportation system and warrants more attention than some of the technical aspects related to autonomous truck deployment.
- Planning
We have categorized articles that focus on route planning, resource allocation, and comprehensive policymaking aimed at improvement into this specific category. Fifteen studies have concentrated on this facet, which suggests that it will continue to gain prominence in the near future. To maximize the available potential of autonomy in transportation systems, researchers must prioritize optimizing fleet planning.
Future studies should undertake a more in-depth examination of planning within the autonomous trucking field. Key areas requiring further research include the allocation of trucks to various services, the scheduling of maintenance periods, the optimization of operational hours, the dedicated use of transportation hubs for loading and unloading, and the timing and selection of fueling locations. These elements are critical for enhancing the efficiency and effectiveness of autonomous freight systems and represent promising avenues for future exploration.
- 2.
- Platooning
A significant portion of research in this category employs platooning as a strategy to enhance system performance. Based on the primary focus of these studies, we have further divided them into two main subcategories. While platooning is an effective way to maximize the potential of autonomous trucks, it is essential to evaluate the associated costs and necessary modifications. Despite the attention it has received, other categories remain more essential due to platooning’s secondary nature.
- Focused on performance
These studies concentrate on the factors that influence the performance of platoons. Notable among these factors are the number of trucks in the platoon and the longitudinal and lateral distances between the trucks.
We recommend that future research in this field place greater emphasis on the impacts of autonomous trucking on road traffic. This includes examining the potential challenges associated with lane changes and the reactions of human drivers when encountering platoons. It appears that, in the early stages, the implementation of platooning may be hindered by its infrastructural complexity and the associated planning requirements. Addressing these challenges will be crucial for the successful integration of autonomous trucks into existing traffic systems.
- b.
- Focused on pavement
Research in this category actively evaluates the impact of platooning on pavement damage and proposes strategies to mitigate it.
Despite comprehensive reviews on solutions to mitigate road destruction caused by fatigue from repetitive loading in platoons, there is a notable paucity of studies that calculate the total damage ratio in relation to the number of trucks in these platoons. Furthermore, there is a significant lack of research on the adaptation of materials that are less susceptible to damage from live repetitive loads, which could be utilized for dedicated lanes for truck platoons. Addressing these gaps is essential for enhancing the durability and sustainability of road infrastructure in the context of autonomous truck operations.
- 3.
- Others
If the evaluation and optimization methodology of a study does not align with either of the previous two categories, we have assigned it to this category. For instance, a study aimed to enhance the performance of autonomous truck systems in an open-pit mine [99]. This was achieved through improved route planning, facilitated by a more precise method of creating a terrain map of the mine.
Cost Estimation
In this category, we have included studies primarily aimed at estimating the costs that autonomous trucks impose on both the network and owners. These costs encompass operational, infrastructural, and systemic expenses. The lack of stochastic continuous approaches for cost estimation is evident and represents a significant gap in the existing literature on autonomous trucks.
The results of these categorizations are presented in Table 4.
Table 4.
Thematic categorizing results for those that insist on practical implementation and economic analysis of ATs.
3.2. Research Method Categorization
To enhance the comprehensiveness of our study, we have established categories based on the assumptions and research methods employed in the articles. These categories are as follows:
3.2.1. Autonomous Technology Description
The Oxford English Dictionary defines “automation” as the use of devices to replace human labor, which aligns with the objective of vehicle automation. However, terms such as “Driverless”, “Self-driving”, and “Autonomous” are often misused. These terms suggest the absence of a driver or complete independence, which is not always accurate. Vehicles frequently depend on auxiliary systems, infrastructure, and other vehicles for information. Consequently, “Connected” may be a more suitable term in certain contexts [19]. Misinterpretation of these terms can lead to confusion, underscoring the importance of precise definitions. In this research, we have accurately defined these terms and categorized them into three general groups. Some studies may fall into two groups due to their multi-dimensional descriptions and research.
A prevalent issue identified in the literature is the inconsistent use and sometimes complete misuse of terms, particularly in the context of autonomous and connected vehicle studies. Many research articles have employed these terms without providing precise definitions, leading to confusion and inaccuracies. This issue is especially pronounced in studies involving autonomous and connected trucks, where some have used the term “autonomous” despite the vehicles being clearly connected. We strongly recommend that future research pay closer attention to the accurate usage of these terms, ensuring clear definitions and distinctions to enhance clarity and rigor in the field.
Autonomous
Research is categorized in this group if the trucks themselves collect the information, or if the research does not provide an explanation about the connection with other trucks or infrastructures.
Connected
Research is allocated to this group if the text provides explanations about the connection and collection of shared information.
Assisted
Studies are allocated to this group if the applied technology explanations in the research correspond to SAE Levels 0, 1, or 2.
The outcomes of this categorization are presented in Table 5.
Table 5.
Categorization of research methods based on the definition of truck technology.
3.2.2. Data Collecting Method
In the interest of enhancing the breadth of our study, we have categorized the studies based on their respective methodologies for procuring indispensable data to meet their research objectives. The categories are as follows:
Existing Data
This category encompasses studies that have leveraged results and information derived from other research, scholarly books, or pre-existing statistical data.
Simulation
This category includes studies that have employed simulation of the research space predicted on their hypotheses for data generation. It also includes studies that have procured initial data from the execution of a similar model or validated their claims through the examination of specific scenarios.
Questionnaire
This category comprises studies that have opted for data collection through the deployment of questionnaires.
Real World Test
This category includes studies that have conducted real-world experiments for data collection or validation of their findings.
The outcomes of the categorization delineated above are presented in Table 6.
Table 6.
Categorizing studies based on their methodology on collecting data.
3.2.3. Research Environment Limitation
Studies that do not impose limitations on their research environment are categorized as ‘Unbounded’. Conversely, research that conducts its investigations on autonomous trucks within a specific and confined environment is classified as ‘Bounded’. Examples of these ‘Bounded’ environments include bridges, mines, industrial workspaces, terminals, ports, and restricted roads between two specific terminals. Given the particular attention to mines as an initial environment for the deployment of autonomous trucks, we have separately categorized this unique environment. Table 7 presents the results of this categorization.
Table 7.
Categorization of studies based on the limitations imposed on the research environment.
It is logical to initially deploy prototypes in controlled environments, gradually expanding their operational scope as confidence in their performance increases. Specific environments tailored to particular tasks will be essential for more focused applications. During the early stages of implementing autonomous trucks, operations should be concentrated between designated hubs and ports. Consequently, bounded areas should receive greater attention to facilitate safe and effective testing and deployment.
3.2.4. Fuel Type of Autonomous Trucks
In a subset of the research we examined, the type of fuel utilized by autonomous trucks has been explicitly specified. In these studies, trucks operate either on fossil fuels or electricity. However, there exists another category of studies where the fuel type of the trucks does not influence the research process. Consequently, we have classified these studies into a distinct category.
Given the recurrent energy crises and the increasingly evident global impacts of greenhouse gas emissions, the number of studies evaluating the field of autonomous trucks remains surprisingly low. This represents a significant and clear gap in the literature that warrants more attention. Addressing this deficiency is critical, as autonomous truck technologies have the potential to contribute to energy efficiency and the reduction in GHG emissions. Therefore, future research should prioritize this area to explore the environmental benefits and sustainability of autonomous trucking.
The results of this categorization can be observed in Table 8.
Table 8.
Categorization of studies based on autonomous trucks’ fuel.
3.2.5. Approach to Analysis: Simultaneous or Separate
Certain studies have conducted separate comparisons of the performance and associated costs of autonomous and manual trucks. It is noteworthy that in the initial phase of autonomous trucks’ integration into the freight system, these trucks will operate concurrently with manual trucks. Consequently, a simultaneous examination of these two types of trucks within a single environment can yield more accurate results. From this standpoint, we highlight this issue as a significant consideration in the enhancement of the literature on autonomous trucks. Some studies have conducted this comparison separately, while others have conducted research independent of this categorization. The results of this categorization are presented in Table 9.
Table 9.
Categorization of studies based on environment that ATs are being compared.
4. Conclusions and Insights
This study presents a thorough review of the literature pertaining to the challenges in the trucking industry that could potentially be addressed by autonomous trucks. Publications that focus on various aspects of autonomy were identified and classified according to their respective subjects. Furthermore, these works were also categorized based on the methodologies employed. These classifications facilitate a clear understanding of the advancements made, highlight the areas of focus, and reveal gaps in the literature that warrant further exploration by researchers in the future. This endeavor aims to provide a roadmap for future scholarly investigations in this rapidly evolving field. More specifically, this review has strategically addressed key topics such as the formulation of new regulations and the optimization of operational planning for autonomous trucks and proposed a novel, logical, and optimized structure for categorizing the literature. This categorization, based on the time relevance of the issues investigated in each article, is expected to guide future researchers in the field of autonomous trucks. A significant portion of the studies evaluated parameters to enhance the feasibility and efficiency of autonomy in the trucking industry, identified obstacles, proposed solutions, and analyzed the roles and impacts of various system components. These studies, which constitute approximately 54% of the reviewed literature, have been grouped under “foundational aspects of ATs implementation”. In contrast, the category “practical implementation and economic analysis of autonomous trucks” includes studies that operate under the assumption that autonomous trucks already exist and thus focus on analyzing strategies, optimization methods, required infrastructure, and financial estimations for improvement. For enhanced visualization, the thematic categorization is presented in a sunburst diagram in Figure 4. The percentage distribution of the reviewed literature corresponding to each theme is also indicated alongside the respective theme names.
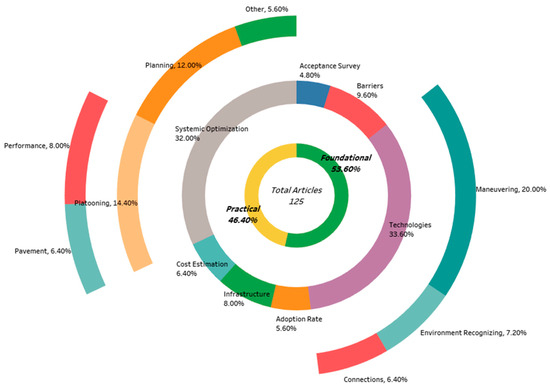
Figure 4.
Sunburst distribution diagram of thematic categorization with percentage related to each theme.
In addition to thematic categorization, the literature exhibits a diversity of methodologies that distinguish articles addressing the same topic. These methodologies are pivotal in unveiling novel topics and identifying gaps within the literature. The salient areas of focus encompass the fuel type of autonomous trucks, the methodologies for data collection, the degree of autonomy in trucks, the environment in which the trucks are evaluated, and the analytical approach—whether it is separate or simultaneous. Our study discerned that a mere 6.4% of the reviewed literature emphasized electricity as a fuel source for autonomous trucks, while 42.4% scrutinized autonomous trucks operating on fossil fuels. Interestingly, 52% did not specify the type of fuel, deeming it an insignificant parameter. The methodologies for data collection exhibited considerable variation: 43.2% of the articles employed simulation, 12% utilized questionnaires, 20% conducted real-world tests, and 26.4% leveraged existing data from various sources. The environment for assessment was confined in 39 out of the 125 reviewed studies, with 16 specifically analyzing the mining context. In terms of the level of autonomy, 77 articles considered the trucks to be fully autonomous, 45 considered connected trucks, and a mere 8 articles mentioned assisted or partially autonomous trucks. Finally, the analytical approach varied, with 23 articles adopting a simultaneous approach and 54 adopting a separate approach. The remaining articles did not specify their analytical approach.
To maximize the utility of our work, it is recommended to employ both categorization methods concurrently. Integrating the data we have provided will assist researchers in identifying gaps and seldom-used methodologies within the topic. For example, finding studies focused on infrastructure becomes a straightforward task. Utilizing a categorization table for the fuel types of autonomous trucks, specific studies investigating the infrastructure for electric autonomous trucks can be easily identified. By arranging the research works in cross-categorical tables, they become readily accessible, thereby streamlining the process of uncovering new research opportunities. This comprehensive approach will provide a robust framework for future research in this rapidly evolving field.
Author Contributions
Conceptualization, A.H. and A.K.; methodology, A.H. and A.K.; validation, A.H. and A.K.; formal analysis, A.H. and A.K.; investigation, A.H. and A.K.; resources, A.K.; data curation, A.H.; writing—original draft preparation, A.H. and A.K.; writing—review and editing, A.K.; visualization, A.H.; supervision, A.K.; project administration, A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data used in this study are available upon request. Interested parties can contact the authors via email to obtain access to the dataset.
Conflicts of Interest
The authors declare no conflicts of interest.
Notes
| 1 | Gross Domestic Product. |
| 2 | https://www.fmcsa.dot.gov/ (accessed on 29 February 2024). |
| 3 | https://scholar.google.com/ (accessed on 9 October 2023). |
| 4 | https://ieeexplore.ieee.org/Xplore/home.jsp, i.e., ee.org/Xplore/home.jsp (accessed on 20 October 2023). |
| 5 | https://www.mdpi.com/ (accessed on 22 October 2023). |
| 6 | https://trid.trb.org/ (accessed on 4 April 2024). |
References
- Mačiulis, A.; Vasiliauskas, A.V.; Jakubauskas, G. The Impact of Transport on the Competitiveness of National Economy. Transport 2009, 24, 93–99. [Google Scholar] [CrossRef]
- Kazemeini, A.; Kermanshah, A. Promoting Sustainable Transport in Developing Countries: A Case Study of University Students in Tehran. Future Transp. 2023, 3, 858–877. [Google Scholar] [CrossRef]
- Kermanshah, A.; Derrible, S. Robustness of Road Systems to Extreme Flooding: Using Elements of GIS, Travel Demand, and Network Science. Nat. Hazards 2017, 86, 151–164. [Google Scholar] [CrossRef]
- Wisetjindawat, W.; Derrible, S.; Kermanshah, A. Modeling the Effectiveness of Infrastructure and Travel Demand Management Measures to Improve Traffic Congestion during Typhoons. Transp. Res. Rec. 2018, 2672, 43–53. [Google Scholar] [CrossRef]
- Kermanshah, A.; Baroud, H.; Abkowitz, M. Cyber-Physical Technologies in Freight Operations and Sustainability: A Case Study of Smart GPS Technology in Trucking. Sustain. Cities Soc. 2020, 55, 102017. [Google Scholar] [CrossRef]
- Freight Transport Statistics—Modal Split. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Freight_transport_statistics_-_modal_split (accessed on 1 January 2024).
- U.S. Freight Movement Mode Share by Tonnage 2020. Available online: https://www.statista.com/statistics/184595/us-freight-movement-mode-share-by-tonnage/ (accessed on 1 January 2024).
- Freight Trucking Market Size & Forecast Analysis [2023–2030]; Fortune Business Insights: Pune, India, 2022; p. 162.
- IRU. Truck Driver Shortage; IRU: Geneva, Switzerland, 2023. [Google Scholar]
- Renewable Energy Statistics; IRENA: Masdar City, United Arab Emirates, 2018; p. 362.
- IEA Study Unveils Key Role for Trucks in Global Oil-Demand Growth—News. Available online: https://www.iea.org/news/iea-study-unveils-key-role-for-trucks-in-global-oil-demand-growth (accessed on 26 February 2024).
- The Truck Driver Shortage in the US Continues. Available online: https://www.ajot.com/news/the-truck-driver-shortage-in-the-us-continues (accessed on 22 January 2024).
- Placek, M. U.S. Truck Driver Shortage 2011–2030. Available online: https://www.statista.com/statistics/1287929/truck-driver-shortage-united-states/ (accessed on 22 January 2024).
- ALANA SEMUELS The Trucking Bubble Has Burst. Available online: https://time.com/6313178/trucking-bubble-has-burst/ (accessed on 22 January 2024).
- ALANA SEMUELS The Great American Trucker Shortage Isn’t Real. Available online: https://time.com/6116853/truck-driver-shortage-supply-chain/ (accessed on 22 January 2024).
- Global Energy Crisis—Topics. Available online: https://www.iea.org/topics/global-energy-crisis (accessed on 30 January 2024).
- Kyle Fretwell Truck Accident Statistics—2023 Edition. Available online: https://www.truckinfo.net/research/truck-accident-statistics (accessed on 30 January 2024).
- Laing, K. Can a Self-Driving 40-Ton Truck Resolve Some Supply Chain Issues? Developers Say Yes. The Economic Times, 9 January 2022. Available online: https://economictimes.indiatimes.com/small-biz/security-tech/technology/can-a-self-driving-40-ton-truck-resolve-some-supply-chain-issues-developers-say-yes/articleshow/88801173.cms?from=mdr (accessed on 20 August 2024).
- Shladover, S.E. Connected and Automated Vehicle Systems: Introduction and Overview. J. Intell. Transp. Syst. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- Engholm, A.; Pernestål, A.; Kristoffersson, I. Cost Analysis of Driverless Truck Operations. Transp. Res. Rec. 2020, 2674, 511–524. [Google Scholar] [CrossRef]
- Paul, A. Eisenstein Millions of Jobs Are on the Line When Autonomous Cars Take Over. Available online: https://www.nbcnews.com/business/autos/millions-professional-drivers-will-be-replaced-self-driving-vehicles-n817356 (accessed on 23 January 2024).
- Roberts, J. Kodiak: Autonomous Trucks Nearly Ready for Real World. Available online: https://www.truckinginfo.com/10214080/kodiak-autonomous-trucks-nearly-ready-for-real-world-fleet-deployment (accessed on 23 January 2024).
- Rahman, M.M.; Thill, J.-C. Impacts of Connected and Autonomous Vehicles on Urban Transportation and Environment: A Comprehensive Review. Sustain. Cities Soc. 2023, 96, 104649. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Connected and Autonomous Vehicles and Infrastructures: A Literature Review. Int. J. Pavement Res. Technol. 2023, 16, 264–284. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Shared Autonomous Vehicle Services: A Comprehensive Review. Transp. Res. Part C Emerg. Technol. 2020, 111, 255–293. [Google Scholar] [CrossRef]
- Azad, M.; Hoseinzadeh, N.; Brakewood, C.; Cherry, C.R.; Han, L.D. Fully Autonomous Buses: A Literature Review and Future Research Directions. J. Adv. Transp. 2019, 2019, e4603548. [Google Scholar] [CrossRef]
- Sankar Raman, S.; Duffy, V.G. A Systematic Review of Autonomous Taxi Service and Discussion on Its Design. In Proceedings of the HCI International 2021—Late Breaking Papers: HCI Applications in Health, Transport, and Industry; Stephanidis, C., Duffy, V.G., Krömker, H., Fui-Hoon Nah, F., Siau, K., Salvendy, G., Wei, J., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 332–344. [Google Scholar]
- Pudasaini, B.; Shahandashti, S.M. A Review on Impacts of Autonomous Trucking on Freight Transportation Infrastructure. In Proceedings of the International Conference on Transportation and Development 2021, American Society of Civil Engineers, Virtual Conference, Virtual Event, 4 June 2021; pp. 391–401. [Google Scholar]
- Rahimi, A.; He, Y. A Review of Essential Technologies for Autonomous and Semi-Autonomous Articulated Heavy Vehicles. In Proceedings of the Canadian Society for Mechanical Engineering International Congress, Charlottetown, PE, Canada, 21–24 June 2020; pp. 21–24. [Google Scholar]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel Economy in Truck Platooning: A Literature Overview and Directions for Future Research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2021. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 24 August 2023).
- Collingwood, L. Autonomous Trucks: An Affront to Masculinity? Inf. Commun. Technol. Law 2018, 27, 251–265. [Google Scholar] [CrossRef]
- Anderhofstadt, B.; Spinler, S. Preferences for Autonomous and Alternative Fuel-Powered Heavy-Duty Trucks in Germany. Transp. Res. Part Transp. Environ. 2020, 79, 102232. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B.; Li, W.; Qin, R. Simulation Study of Passing Drivers’ Responses to the Autonomous Truck-Mounted Attenuator System in Road Maintenance. Transp. Res. Rec. 2023, 2677, 17–32. [Google Scholar] [CrossRef]
- Trösterer, S.; Meneweger, T.; Meschtscherjakov, A.; Tscheligi, M. Transport Companies, Truck Drivers, and the Notion of Semi-Autonomous Trucks: A Contextual Examination. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct; Association for Computing Machinery, New York, NY, USA, 24 September 2017; pp. 201–205. [Google Scholar]
- Talebian, A.; Mishra, S. Unfolding the State of the Adoption of Connected Autonomous Trucks by the Commercial Fleet Owner Industry. Transp. Res. Part E Logist. Transp. Rev. 2022, 158, 102616. [Google Scholar] [CrossRef]
- Müller, S.; Voigtländer, F. Automated Trucks in Road Freight Logistics: The User Perspective. In Proceedings of the Advances in Production, Logistics and Traffic; Clausen, U., Langkau, S., Kreuz, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 102–115. [Google Scholar]
- Elgharbawy, M.; Scherhaufer, I.; Oberhollenzer, K.; Frey, M.; Gauterin, F. Adaptive Functional Testing for Autonomous Trucks. Int. J. Transp. Sci. Technol. 2018, 8, 202–218. [Google Scholar] [CrossRef]
- Chottani, A.; Hastings, G.; Murnane, J.; Neuhaus, F. Distraction or Disruption? Autonomous Trucks Gain Ground in US Logistics; McKinsey & Company: Chicago, IL, USA, 2018. [Google Scholar]
- Viscelli, S. Driverless? Autonomous Trucks and the Future of the American Trucker; Center for Labor Research and Education, University of California, Berkeley, and Working Partnerships USA. September 2018. Available online: https://laborcenter.berkeley.edu/driverless/ (accessed on 20 August 2024).
- Gölbaşı, O.; Dagdelen, K. Equipment Replacement Analysis of Manual Trucks with Autonomous Truck Technology in Open Pit Mines. In Proceedings of the Application of Computers and Operations Research in the Mineral Industry, Golden, CO, USA, 9 August 2017. [Google Scholar]
- Tian, C.; Xiao, J.; Chen, Y.; Feng, Y.; Zhang, J. Implementation, Benefits, and Challenges of Autonomous Truck-Mounted Attenuator. 2022; pp. 120–128. Available online: https://ascelibrary.org/doi/10.1061/9780784484333.011 (accessed on 20 August 2024).
- Hu, X.; Tang, Q. Modeling and Development of Operation Guidelines for Leader-Follower Autonomous Truck-Mounted Attenuator Vehicles. arXiv 2021, arXiv:2104.06507. [Google Scholar] [CrossRef]
- Gnap, J.; Říha, Z.; Semanova, S. Proposal of Methodology to Calculate Necessary Number of Autonomous Trucks for Trolleys and Efficiency Evaluation. Open Eng. 2020, 10, 255–264. [Google Scholar] [CrossRef]
- Kassai, E.T.; Azmat, M.; Kummer, S. Scope of Using Autonomous Trucks and Lorries for Parcel Deliveries in Urban Settings. Logistics 2020, 4, 17. [Google Scholar] [CrossRef]
- Kim, E.; Kim, Y.; Park, J. The Necessity of Introducing Autonomous Trucks in Logistics 4.0. Sustainability 2022, 14, 3978. [Google Scholar] [CrossRef]
- Sternberg, H.S.; Chen, H.; Hofmann, E.; Prockl, G. Autonomous Trucks: A Supply Chain Adoption Perspective. In Proceedings of the 53rd Hawaii International Conference on System Sciences, Maui, HI, USA, 7–10 January 2020; Hawaii International Conference on System Sciences (HICSS). 2020; pp. 4534–4539. [Google Scholar]
- Mondy. An Empirical Analysis of Factors Affecting Autonomous Truck Adoption; University of Missouri: Saint Louis, MI, USA, 2021. [Google Scholar]
- Engholm, A. Driverless Trucks in the Swedish Freight Transport System: An Analysis of Future Impacts on the Transport System and the Emerging Innovation System; Licentiate, Kth Royal Institute of Technology: Stockholm, Sweden, 2021. [Google Scholar]
- Rigatos, G.; Siano, P.; Wira, P.; Busawon, K.; Binns, R. A Nonlinear H-Infinity Control Approach for Autonomous Truck and Trailer Systems. Unmanned Syst. 2020, 08, 49–69. [Google Scholar] [CrossRef]
- Manav, A.C.; Lazoglu, I. A Novel Cascade Path Planning Algorithm for Autonomous Truck-Trailer Parking. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6821–6835. [Google Scholar] [CrossRef]
- Kolb, J.K.; Nitzsche, G.; Wagner, S. A Simple yet Efficient Path Tracking Controller for Autonomous Trucks⁎⁎This Work Is Funded by the Federal Ministry for Economic Affairs and Energy Germany. IFAC-Pap. 2019, 52, 307–312. [Google Scholar] [CrossRef]
- Zhang, F.; Xia, R.; Chen, X. An Optimal Trajectory Planning Algorithm for Autonomous Trucks: Architecture, Algorithm, and Experiment. Sage Publ. 2020, 17, 1729881420909603. [Google Scholar] [CrossRef]
- Fadillah Rukmana, M.A.; Widyotriatmo, A.; Siregar, P.I. Anti-Jackknife Autonomous Truck Trailer for Path Following Control Using Genetic Algorithm. In Proceedings of the 2021 International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 25–28 August 2021; pp. 186–191. [Google Scholar]
- Kim, S.; Jang, M.; La, H.; Oh, K. Development of a Particle Filter-Based Path Tracking Algorithm of Autonomous Trucks with a Single Steering and Driving Module Using a Monocular Camera. Sensors 2023, 23, 3650. [Google Scholar] [CrossRef] [PubMed]
- Pachêco Gomes, I.; Renan Bruno, D.; Santos Osório, F.; Fernando Wolf, D. Diagnostic Analysis for an Autonomous Truck Using Multiple Attribute Decision Making. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), Joao Pessoa, Brazil, 6–10 November 2018; pp. 283–290. [Google Scholar]
- Lima, P.F.; Trincavelli, M.; Nilsson, M.; Mårtensson, J.; Wahlberg, B. Experimental Evaluation of Economic Model Predictive Control for an Autonomous Truck. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 710–715. [Google Scholar]
- Cirillo, M. From Videogames to Autonomous Trucks: A New Algorithm for Lattice-Based Motion Planning. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 148–153. [Google Scholar]
- Kusumakar, R.; Buning, L.; Rieck, F.; Schuur, P.; Tillema, F. INTRALOG—Intelligent Autonomous Truck Applications in Logistics; Single and Double Articulated Autonomous Rearward Docking on DCs. IET Intell. Transp. Syst. 2018, 12, 1045–1052. [Google Scholar] [CrossRef]
- Widyotriatmo, A.; Siregar, P.I.; Nazaruddin, Y.Y. Line Following Control of an Autonomous Truck-Trailer. In Proceedings of the 2017 International Conference on Robotics, Biomimetics, and Intelligent Computational Systems (Robionetics), Bali, Indonesia, 23–25 August 2017; pp. 24–28. [Google Scholar]
- Shi, Y.; Chen, Y.; Jia, B. Local Trajectory Planning for Autonomous Trucks in Collision Avoidance Maneuvers with Rollover Prevention. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PE, USA, 10–12 July 2019; pp. 3981–3986. [Google Scholar]
- Bos, M.; Vandewal, B.; Decré, W.; Swevers, J. MPC-Based Motion Planning for Autonomous Truck-Trailer Maneuvering. IFAC-Pap. 2023, 56, 4877–4882. [Google Scholar] [CrossRef]
- Lima, P.F.; Nilsson, M.; Trincavelli, M.; Mårtensson, J.; Wahlberg, B. Spatial Model Predictive Control for Smooth and Accurate Steering of an Autonomous Truck. IEEE Trans. Intell. Veh. 2017, 2, 238–250. [Google Scholar] [CrossRef]
- Al Jawahiri, A. Spline-Based Trajectory Generation for Autonomous Truck-Trailer Vehicles in Low Speed Highway Scenarios. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Xiong, X.; Tian, B.; Zhang, R.; Sun, Y.; Chen, L. Terrain-Adaptive Longitudinal Control for Autonomous Trucks. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 4375–4380. [Google Scholar]
- Shi, Y.; Huang, Y.; Chen, Y. Trajectory Planning of Autonomous Trucks for Collision Avoidance With Rollover Prevention. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8930–8939. [Google Scholar] [CrossRef]
- Ye, T.; Liu, D.; Wei, J.; Lin, Y. A Novel Approach for Obstacle Avoidance Maneuverer Controls to a 49ton Autonomous Drive Heavy-Duty Truck in GCV. In Proceedings of the 2023 IEEE 3rd International Conference on Power, Electronics and Computer Applications (ICPECA), Shenyang, China, 29–31 January 2023; pp. 902–906. [Google Scholar]
- Tsai, C.-Y.; Sung, C.-K. Algebraic General Trajectory Formula for Semitrailer Truck Vehicles. IEEE Trans. Autom. Sci. Eng. 2021, 18, 2156–2165. [Google Scholar] [CrossRef]
- Hilmi, M.; Widyotriatmo, A. Anti-Jackknife Control for Forward Motion Path Following of a Truck Trailer. In Proceedings of the 2023 8th International Conference on Instrumentation, Control, and Automation (ICA), Jakarta, Indonesia, 9–11 August 2023; pp. 114–119. [Google Scholar]
- Ardhi, R.; Febsya, M.R.; Widyotriatmo, A.; Nazaruddin, Y.Y. Backward Motion Path Following Control of Autonomous Truck-Trailer: Lyapunov Stability Approach. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 900–905. [Google Scholar]
- Febsya, M.R.; Ardhi, R.; Widyotriatmo, A.; Nazaruddin, Y.Y. Design Control of Forward Motion of an Autonomous Truck-Trailer Using Lyapunov Stability Approach. In Proceedings of the 2019 6th International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 31 July 2019; pp. 65–70. [Google Scholar]
- Hahn, R. New Exterior Design Options for Improving the Efficiency of Fully Autonomous Heavy Duty Vehicles. In Proceedings of the 2022 Second International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Virtual, 23–25 November 2022; pp. 1–5. [Google Scholar]
- Wang, F.; Zhang, Z. Route Control and Behavior Decision of Intelligent Driverless Truck Based on Artificial Intelligence Technology. Wirel. Commun. Mob. Comput. 2022, 2022, e7025081. [Google Scholar] [CrossRef]
- Asrofudin, B.; Widyotriatmo, A.; Siregar, P.I.; Apeco Putra, D. Sigmoid Function Optimization for Path Following Control with Obstacle Avoidance of an Autonomous Truck-Trailer. In Proceedings of the 2021 International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 25–28 August 2021; pp. 180–185. [Google Scholar]
- Song, T.; Lee, H.; Oh, K. A Model Predictive Tracking Control Algorithm of Autonomous Truck Based on Object State Estimation Using Extended Kalman Filter. J. Drive Control 2019, 16, 22–29. [Google Scholar] [CrossRef]
- Ruan, S.; Li, S.; Lu, C.; Gu, Q. A Real-Time Negative Obstacle Detection Method for Autonomous Trucks in Open-Pit Mines. Sustainability 2023, 15, 120. [Google Scholar] [CrossRef]
- Meng, D.; Tian, B.; Pan, Z.; Cao, D.; Chen, L. Berm Detection for Autonomous Truck in Surface Mine Dump Area. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–21 September 2021; pp. 2829–2834. [Google Scholar]
- Lu, X.; Ai, Y.; Tian, B. Real-Time Mine Road Boundary Detection and Tracking for Autonomous Truck. Sensors 2020, 20, 1121. [Google Scholar] [CrossRef]
- Tang, J.; Lu, X.; Ai, Y.; Tian, B.; Chen, L. Road Detection for Autonomous Truck in Mine Environment. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 839–845. [Google Scholar]
- Vinh, N.Q.; Kim, H.-S.; Long, L.N.B.; You, S.-S. Robust Lane Detection Algorithm for Autonomous Trucks in Container Terminals. J. Mar. Sci. Eng. 2023, 11, 731. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, T.; Wang, H.; Wu, S.; Shao, Z. Stability Analysis of a Vehicle–Cargo Securing System for Autonomous Trucks Based on 6-SPS-Type Parallel Mechanisms. Machines 2023, 11, 745. [Google Scholar] [CrossRef]
- DiPalma, C.; Wang, N.; Sato, T.; Chen, Q.A. Demo: Security of Camera-Based Perception for Autonomous Driving under Adversarial Attack. In Proceedings of the 2021 IEEE Security and Privacy Workshops (SPW), Francisco, CA, USA, 27 May 2021; p. 243. [Google Scholar]
- Rzydzik, S.; Saltarski, A.; Roziński, M.; Psiuk, K. Infrared Distance Sensors for Autonomous Model of Truck with Semi-Trailer. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering (ICMRE), Barcelona, Spain, 12–15 February 2020; pp. 104–109. [Google Scholar]
- Wang, M.; Zhou, A.; Chen, X.; Shen, Y.; Li, Z. A Novel Asynchronous UWB Positioning System for Autonomous Trucks in an Automated Container Terminal. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 3413–3422. [Google Scholar] [CrossRef]
- Li, W.; Meese, C.; Guo, H.; Nejad, M. Aggregated Zero-Knowledge Proof and Blockchain-Empowered Authentication for Autonomous Truck Platooning. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9309–9323. [Google Scholar] [CrossRef]
- Sari, T.; Sever, M.; Candan, A.T.; Girgin, G.T.Ç.; Girgin, E.; Haklıdır, M. Cloud Assisted Connected and Automated Mobility System Architecture Design and Experimental Verification: The 5G-MOBIX Autonomous Truck Routing Use Case. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022; pp. 1374–1380. [Google Scholar]
- Li, W.; Meese, C.; Zhong, Z.G.; Guo, H.; Nejad, M. Location-Aware Verification for Autonomous Truck Platooning Based on Blockchain and Zero-Knowledge Proof. In Proceedings of the 2021 IEEE International Conference on Blockchain and Cryptocurrency (ICBC), Sydney, Australia, 3–6 May 2021; pp. 1–5. [Google Scholar]
- Xing, R.; Su, Z.; Xu, Q.; Zhang, N.; Luan, T.H. Secure Content Delivery for Connected and Autonomous Trucks: A Coalition Formation Game Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20522–20537. [Google Scholar] [CrossRef]
- Balador, A.; Bazzi, A.; Hernandez-Jayo, U.; de la Iglesia, I.; Ahmadvand, H. A Survey on Vehicular Communication for Cooperative Truck Platooning Application. Veh. Commun. 2022, 35, 100460. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Lu, Y. Cooperative Delivery of Truck-UAV with Consideration of the UAV Track. In Proceedings of the 2023 19th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Harbin, China, 29–31 July 2023; pp. 1–6. [Google Scholar]
- Elhadeedy, A.; Daily, J. Securing New Autonomous Truck-Trailer Communication Protocols. In Proceedings of the 2023 IEEE World AI IoT Congress (AIIoT), Virtual, 7–10 June 2023; pp. 0384–0391. [Google Scholar]
- Simpson, J.R.; Mishra, S.; Talebian, A.; Golias, M.M. An Estimation of the Future Adoption Rate of Autonomous Trucks by Freight Organizations. Res. Transp. Econ. 2019, 76, 100737. [Google Scholar] [CrossRef]
- Simpson, J.R.; Sharma, I.; Mishra, S. Modeling Trucking Industry Perspective on the Adoption of Connected and Autonomous Trucks. Res. Transp. Bus. Manag. 2022, 45, 100883. [Google Scholar] [CrossRef]
- Ackerman, E. Robot Trucks Overtake Robot Cars: This Year, Trucks Will Drive Themselves on Public Roads with No One on Board. IEEE Spectr. 2021, 58, 42–43. [Google Scholar] [CrossRef]
- Fritschy, C.; Spinler, S. The Impact of Autonomous Trucks on Business Models in the Automotive and Logistics Industry–a Delphi-Based Scenario Study. Terrain-Adapt. Longitud. Control Auton. Trucks 2019, 148, 119736. [Google Scholar] [CrossRef]
- Simpson, J.R.; Mishra, S. Developing a Methodology to Predict the Adoption Rate of Connected Autonomous Trucks in Transportation Organizations Using Peer Effects. Res. Transp. Econ. 2021, 90, 100866. [Google Scholar] [CrossRef]
- Balata, D.; Menghes, R. Innovation Diffusion Dynamics and Behavior of Actors in Road Freight Transportation: A Study of the Market Uptake Dynamics and Adoption of Driverless Trucks. 2021. Available online: https://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-296515 (accessed on 12 June 2023).
- Hodes, C.; McCabe, P.; McGeeney, A.; Smith, S.; Sun, I.; Awwad, M. The Future of Autonomous Trucks in the Supply Chain Industry. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2020; pp. 203–208. Available online: https://www.proceedings.com/58547.html (accessed on 20 August 2024).
- Wang, J.; Tian, B.; Zhu, Y.; Yao, T.; Pan, Z.; Chen, L. Terrain Mapping for Autonomous Trucks in Surface Mine. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 4369–4374. [Google Scholar]
- Andersson, P.; Ivehammar, P. Benefits and Costs of Autonomous Trucks and Cars. J. Transp. Technol. 2019, 9, 121–145. [Google Scholar] [CrossRef]
- Lee, S.; Cho, K.; Park, H.; Cho, D. Cost-Effectiveness of Introducing Autonomous Trucks: From the Perspective of the Total Cost of Operation in Logistics. Appl. Sci. 2023, 13, 10467. [Google Scholar] [CrossRef]
- Sen, B.; Kucukvar, M.; Onat, N.C.; Tatari, O. Life Cycle Sustainability Assessment of Autonomous Heavy-Duty Trucks. J. Ind. Ecol. 2019, 24, 149–164. [Google Scholar] [CrossRef]
- Tao, X.; Mårtensson, J.; Warnquist, H.; Pernestål, A. Short-Term Maintenance Planning of Autonomous Trucks for Minimizing Economic Risk. Reliab. Eng. Syst. Saf. 2022, 220, 108251. [Google Scholar] [CrossRef]
- Engholm, A.; Kristoffersson, I.; Pernestal, A. Impacts of Large-Scale Driverless Truck Adoption on the Freight Transport System. Transp. Res. Part Policy Pract. 2021, 154, 227–254. [Google Scholar] [CrossRef]
- Sigle, S.; Hahn, R. Energy Assessment of Different Powertrain Options for Heavy-Duty Vehicles and Energy Implications of Autonomous Driving. Energies 2023, 16, 6512. [Google Scholar] [CrossRef]
- Lunkeit, S.; Flämig, H.; Rosenberger, K. The Impact of Driverless Vehicles on Transportation Costs in Road Haulage: A System Dynamical Approach. In Proceedings of the Advances in Production, Logistics and Traffic; Clausen, U., Langkau, S., Kreuz, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 116–127. [Google Scholar]
- Zhao, Z.; Bi, L. A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Appl. Sci. 2020, 10, 6622. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Meng, Q. Autonomous Truck Scheduling for Container Transshipment between Two Seaport Terminals Considering Platooning and Speed Optimization. Transp. Res. Part B Methodol. 2021, 154, 289–315. [Google Scholar] [CrossRef]
- Al Hajj Hassan, L.; Hewitt, M.; Mahmassani, H.S. Daily Load Planning under Different Autonomous Truck Deployment Scenarios. Transp. Res. Part E Logist. Transp. Rev. 2022, 166, 102885. [Google Scholar] [CrossRef]
- Bouguerra, A.; Andreasson, H.; Lilienthal, A.J.; Åstrand, B.; Rögnvaldsson, T. MALTA: A System of Multiple Autonomous Trucks for Load Transportation; KoREMA: Weiterstadt, Germany, 2009; pp. 91–96. [Google Scholar]
- Fang, Y.; Peng, X. Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics 2023, 12, 3793. [Google Scholar] [CrossRef]
- Price, R.; Cornelius, M.; Burnside, L.; Miller, B. Mine Planning and Selection of Autonomous Trucks. In Proceedings of the 28th International Symposium on Mine Planning and Equipment Selection—MPES 2019; Topal, E., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 203–212. [Google Scholar]
- Zhang, X.; Guo, A.; Ai, Y.; Tian, B.; Chen, L. Real-Time Scheduling of Autonomous Mining Trucks via Flow Allocation-Accelerated Tabu Search. IEEE Trans. Intell. Veh. 2022, 7, 466–479. [Google Scholar] [CrossRef]
- Hasgul, Z.; Aytore, C. Road Selection for Autonomous Trucks in Turkey with Fuzzy AHP. In Proceedings of the Intelligent and Fuzzy Techniques: Smart and Innovative Solutions; Kahraman, C., Cevik Onar, S., Oztaysi, B., Sari, I.U., Cebi, S., Tolga, A.C., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 582–590. [Google Scholar]
- Nasri, M.I.; Bektaş, T.; Laporte, G. Route and Speed Optimization for Autonomous Trucks. Comput. Oper. Res. 2018, 100, 89–101. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, L.; Ai, Y.; Tian, B.; Cao, D.; Li, L. Scheduling of Autonomous Mining Trucks: Allocation Model Based Tabu Search Algorithm Development. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 982–989. [Google Scholar]
- Chen, C.-M.; Lu, Y. Shipment Sizing for Autonomous Trucks of Road Freight. Int. J. Logist. Manag. 2020, 32, 413–433. [Google Scholar] [CrossRef]
- Tian, F.; Zhou, R.; Li, Z.; Li, L.; Gao, Y.; Cao, D.; Chen, L. Trajectory Planning for Autonomous Mining Trucks Considering Terrain Constraints. IEEE Trans. Intell. Veh. 2021, 6, 772–786. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Chen, P.; Yu, G.; Liao, Y. A Secure Trajectory Planning Method for Connected Autonomous Vehicles at Mining Site. Symmetry 2023, 15, 1973. [Google Scholar] [CrossRef]
- Hong, C.; Guo, Y.; Wang, Y.; Li, T. The Integrated Scheduling Optimization for Container Handling by Using Driverless Electric Truck in Automated Container Terminal. Sustainability 2023, 15, 5536. [Google Scholar] [CrossRef]
- Salip, D.; Mavlonazarov, K.; Razumowsky, A. Optimization of Energy Consumption by Autonomous Electric Trucks during Cargo Transportation Based on the Artificial Bee Colony Algorithm. In Proceedings of the 2023 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 15–19 May 2023; pp. 520–525. [Google Scholar]
- Chen, S.; Wang, H.; Meng, Q. Cost Allocation of Cooperative Autonomous Truck Platooning: Efficiency and Stability Analysis. Transp. Res. Part B Methodol. 2023, 173, 119–141. [Google Scholar] [CrossRef]
- Wang, H.; Song, L.; Wei, Z.; Peng, L.; Li, J.; Hashemi, E. Driving Safety Zone Model Oriented Motion Planning Framework for Autonomous Truck Platooning. Accid. Anal. Prev. 2023, 193, 107225. [Google Scholar] [CrossRef]
- Hoque, M.M.; Lu, Q.; Ghiasi, A.; Xin, C. Highway Cost Analysis for Platooning of Connected and Autonomous Trucks. J. Transp. Eng. Part Syst. 2020, 147, 04020148. [Google Scholar] [CrossRef]
- Liu, D.; Eksioglu, B.; Schmid, M.J.; Huynh, N.; Comert, G. Optimizing Energy Savings for a Fleet of Commercial Autonomous Trucks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7570–7586. [Google Scholar] [CrossRef]
- Schirrer, A.; Haniš, T.; Klaučo, M.; Thormann, S.; Hromčík, M.; Jakubek, S. Safety-Extended Explicit MPC for Autonomous Truck Platooning on Varying Road Conditions. IFAC-Pap. 2020, 53, 14344–14349. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R. Truck Platoon Analysis for Autonomous Trucks. SN Appl. Sci. 2023, 5, 143. [Google Scholar] [CrossRef]
- de Curtò, J.; de Zarzà, I.; Cano, J.C.; Manzoni, P.; Calafate, C.T. Adaptive Truck Platooning with Drones: A Decentralized Approach for Highway Monitoring. Electronics 2023, 12, 4913. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, Z.; Duan, Y.; Yu, B. Research on Reinforcement-Learning-Based Truck Platooning Control Strategies in Highway On-Ramp Regions. World Electr. Veh. J. 2023, 14, 273. [Google Scholar] [CrossRef]
- Muhamadinah, Y.; Arrinanda, A.Z.; Joelianto, E.; Widyotriatmo, A. Backstepping Control Design for Platooning Formation System in Down Scale Autonomous Truck Trailers. In Proceedings of the 2019 IEEE 6th Asian Conference on Defence Technology (ACDT), Bali, Indonesia, 13–15 November 2019; pp. 136–141. [Google Scholar]
- Jingwen, L.; Fang, Y.; Yaqian, N.; Jingzhi, W.; Yongsheng, Y. Research on Driverless Truck PLATOON Control Based on Improved Variable Time Headway Policy. In Proceedings of the 2022 International Symposium on Sensing and Instrumentation in 5G and IoT Era (ISSI), Shanghai, China, 17–18 November 2022; pp. 24–28. [Google Scholar]
- Chen, F.; Song, M.; Ma, X.; Zhu, X. Assess the Impacts of Different Autonomous Trucks’ Lateral Control Modes on Asphalt Pavement Performance. Transp. Res. Part C Emerg. Technol. 2019, 103, 17–29. [Google Scholar] [CrossRef]
- Georgouli, K.; Plati, C. Autonomous Trucks’ (ATs) Lateral Distribution and Asphalt Pavement Performance. Int. J. Pavement Eng. 2022, 24, 2046274. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Impact of Autonomous Truck Implementation: Rutting and Highway Safety Perspectives. Road Mater. Pavement Des. 2020, 23, 2205–2226. [Google Scholar] [CrossRef]
- Gungor, O.E.; She, R.; Al-Qadi, I.L.; Ouyang, Y. One for All: Decentralized Optimization of Lateral Position of Autonomous Trucks in a Platoon to Improve Roadway Infrastructure Sustainability. Transp. Res. Part C Emerg. Technol. 2020, 120, 102783. [Google Scholar] [CrossRef]
- Gungor, O.E.; She, R.; Al-Qadi, I.L.; Ouyang, Y.; University of Illinois at Urbana-Champaign, Department of Civil and Environmental Engineering. Optimization of Lateral Position of Autonomous Trucks; Illinois Center for Transportation: Rantoul, IL, USA, 2018. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. Organization of Autonomous Truck Platoon Considering Energy Saving and Pavement Fatigue. Transp. Res. Part Transp. Environ. 2021, 90, 102667. [Google Scholar] [CrossRef]
- Huang, K.; Cai, S.; Birgisson, B. Performance Impact of Autonomous Trucks on Flexible Pavements: An Evaluation Framework and Case Studies. Int. J. Pavement Eng. 2023, 24, 2229481. [Google Scholar] [CrossRef]
- Merhebi, G.H.; Joumblat, R.; Elkordi, A. Assessment of the Effect of Different Loading Combinations Due to Truck Platooning and Autonomous Vehicles on the Performance of Asphalt Pavement. Sustainability 2023, 15, 10805. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. A Simulation of the Traffic Behavior with Autonomous Truck Platoons Based on Cellular Automaton. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 416–423. [Google Scholar]
- Kohls, A.G. Autonomous Truck Mounted Attenuator (ATMA) Pilot; Tennessee Department of Transportation: Nashville, TN, USA, 2020. [Google Scholar]
- Tang, Q.; Hu, X.; Yang, H. Identification of Operational Design Domain for Autonomous Truck Mounted Attenuator System on Multilane Highways. Transp. Res. Rec. 2021, 2676, 1–15. [Google Scholar] [CrossRef]
- Yuan, Z.; Herve, S. Optimal Models for Autonomous Trucks and Drones Resupply for Last-Mile Delivery in Urban Areas. IFAC-Pap. 2022, 55, 3142–3147. [Google Scholar] [CrossRef]
- Erlandson, W. Traffic Flow Implications of Driverless Trucks Microscopic Traffic Simulations Using SUMO; Department of Technology and Society Lund University: Lund, Sweden, 2020. [Google Scholar]
- Ho, C.C.; Ulfitria, R.U.S. Automatic Anti-Lock Brake System for Anti-Rollover Control of Autonomous Heavy-Duty Truck. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics, Taipei, Taiwan, 6–8 July 2022; pp. 181–182. [Google Scholar]
- Stentz, A.; Bares, J.; Singh, S.; Rowe, P. A Robotic Excavator for Autonomous Truck Loading. Auton. Robots 1999, 7, 175–186. [Google Scholar] [CrossRef]
- Noorvand, H.; Karnati, G.; Underwood, B.S. Autonomous Vehicles: Assessment of the Implications of Truck Positioning on Flexible Pavement Performance and Design. Transp. Res. Rec. 2017, 2640, 21–28. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R.; Fuleki, P. Creep Model to Determine Rut Development by Autonomous Truck Axles on Pavement. Pollack Period. 2020, 17, 66–71. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R. Effective Lane Width Analysis for Autonomous Trucks. SN Appl. Sci. 2023, 5, 232. [Google Scholar] [CrossRef]
- Adegbohun, F.; von Jouanne, A.; Agamloh, E.; Yokochi, A. Geographical Modeling of Charging Infrastructure Requirements for Heavy-Duty Electric Autonomous Truck Operations. Energies 2023, 16, 4161. [Google Scholar] [CrossRef]
- Benlaajili, S.; Moutaouakkil, F.; Chebak, A. Infrastructural Requirements for the Implementation of Autonomous Trucks in Open-Pit Mines. E3S Web Conf. 2021, 315, 03009. [Google Scholar] [CrossRef]
- Jehanfo, H.; Hu, S.; Kaparias, I.; Preston, J.; Zhou, F.; Stevens, A. Redesigning Highway Infrastructure Systems for Connected Autonomous Truck Lanes. J. Transp. Eng. Part Syst. 2022, 148, 04022104. [Google Scholar] [CrossRef]
- Sajid, S.; Chouinard, L.; Legeron, F.; Ude, T.; He, E.; Ajrab, J. Reliability Analysis of Bridges for Autonomous Truck Platoons. Transp. Res. Rec. 2023, 2677, 1071–1081. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Simulation of Autonomous Truck for Minimizing Asphalt Pavement Distresses. Road Mater. Pavement Des. 2021, 23, 1266–1286. [Google Scholar] [CrossRef]
- Tohme, R.; Yarnold, M. Steel Bridge Load Rating Impacts Owing to Autonomous Truck Platoons. Transp. Res. Rec. 2020, 2674, 57–67. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).