
Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand


Abstract
:1. Introduction
2. Test Content and Scheme
2.1. Test Instruments and Functions
2.1.1. Composition of Dynamic Triaxial Apparatus System DYNTTS
2.1.2. Experimental Principle of GDS Dynamic Triaxial Apparatus
2.2. Test Scheme and Damage Standard
2.2.1. Test Scheme
2.2.2. Damage Standard
2.3. Test Procedures
2.3.1. Test Materials and Sample Preparation
2.3.2. Installation, Saturation, and Consolidation of Samples
3. Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand
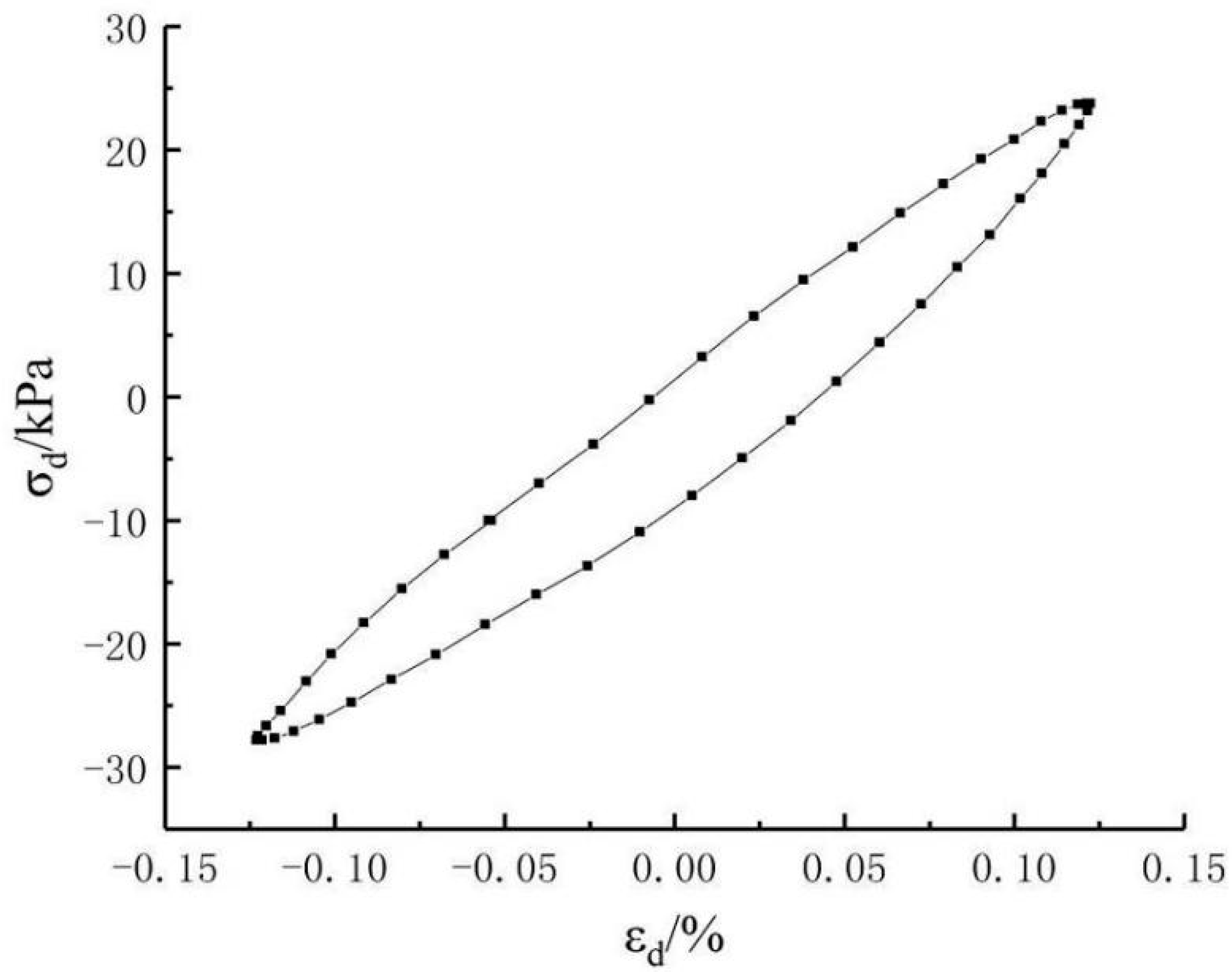
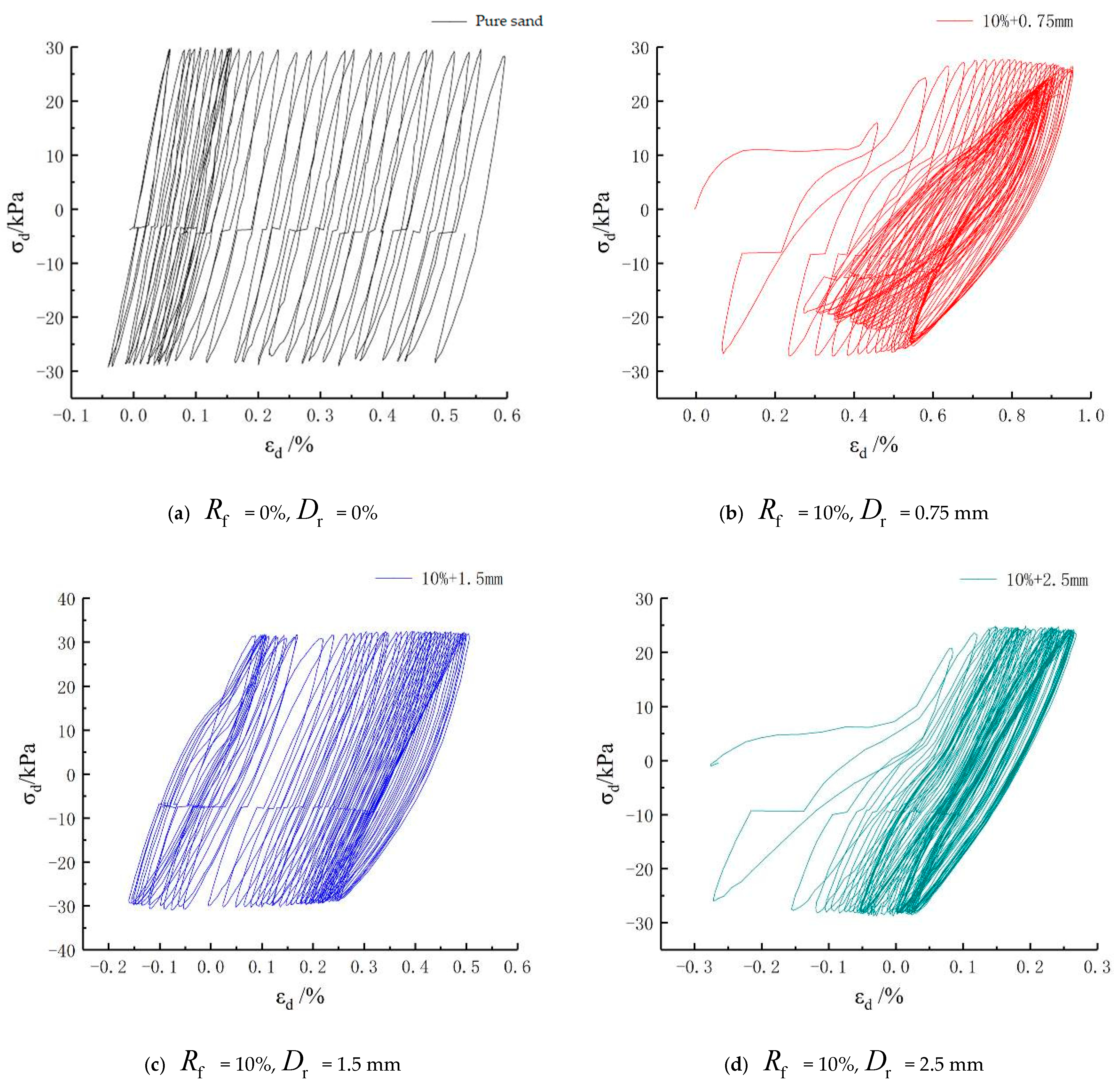
3.1. Change Rules of the Dynamic Stress–Strain Hysteresis Curve
Research on Hysteresis Curve Morphology of Rubber-Particle-Mixed Sand
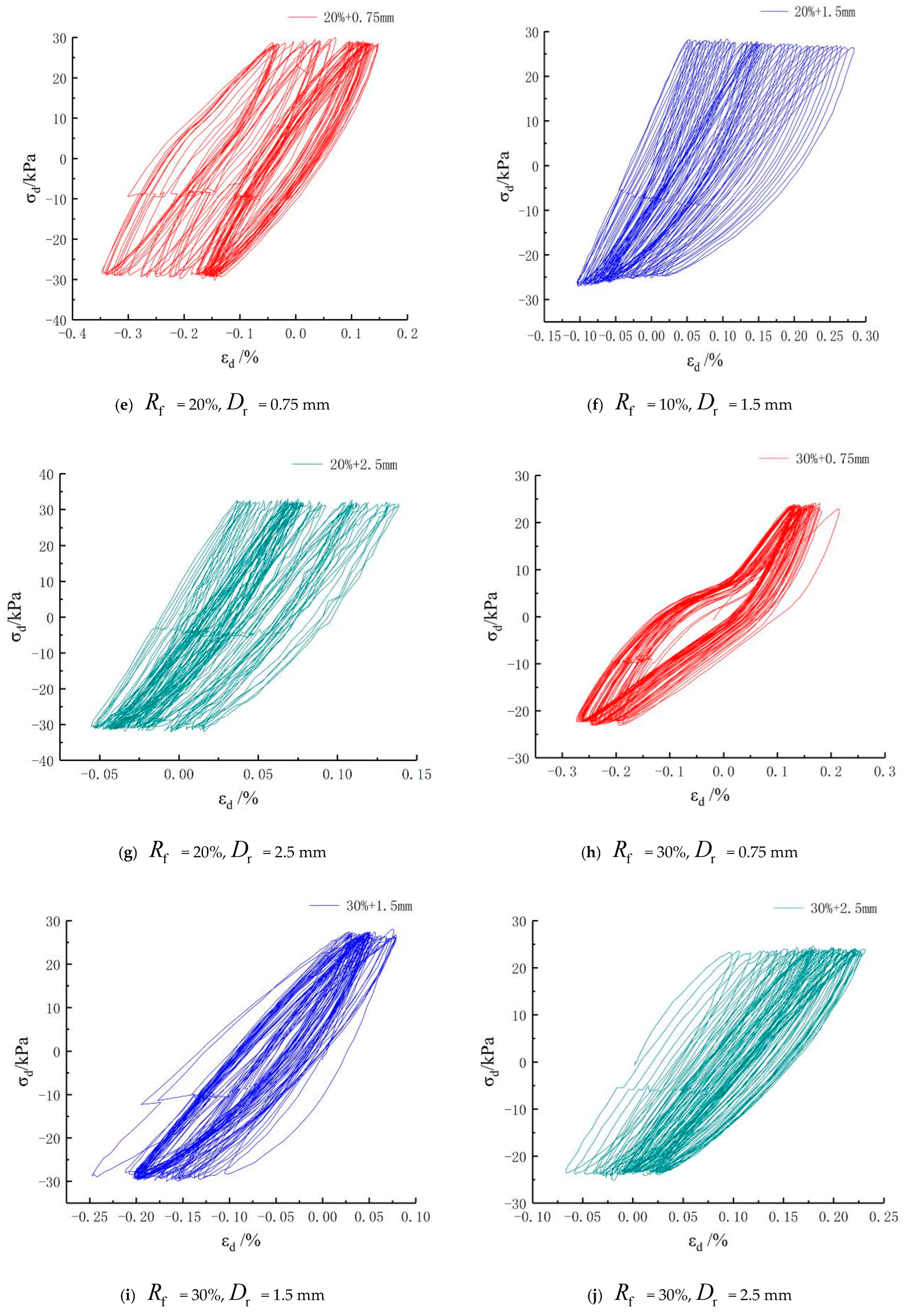
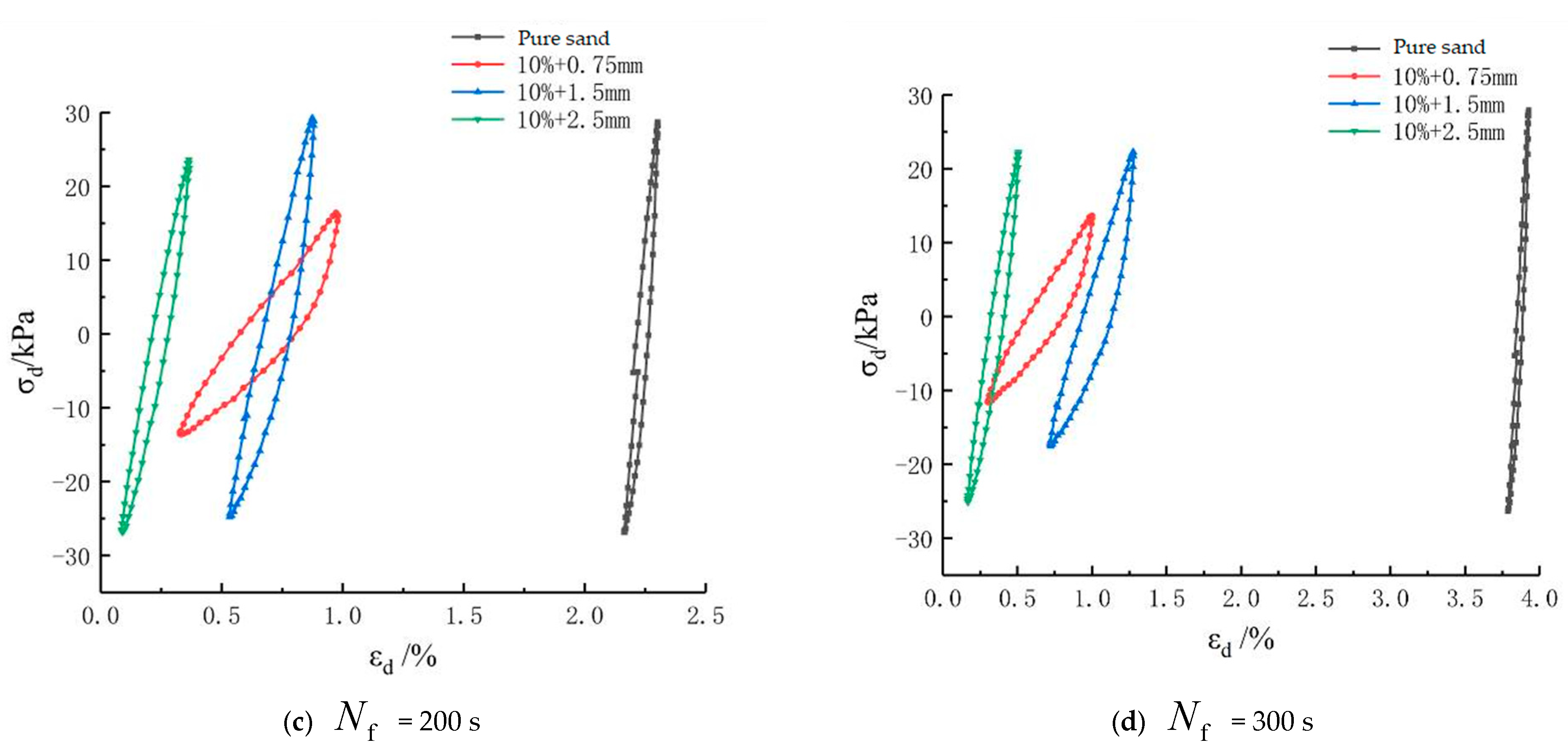
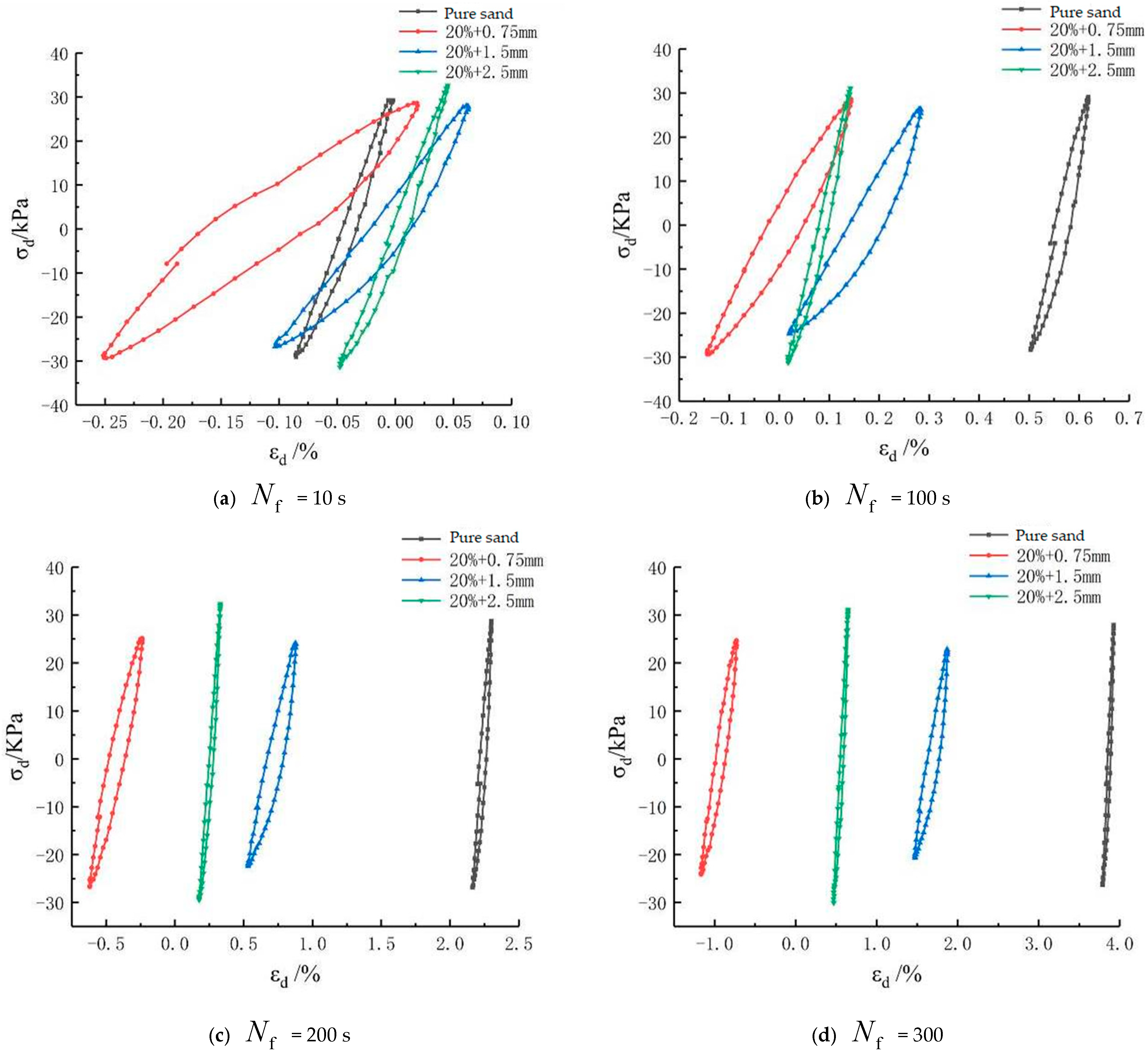
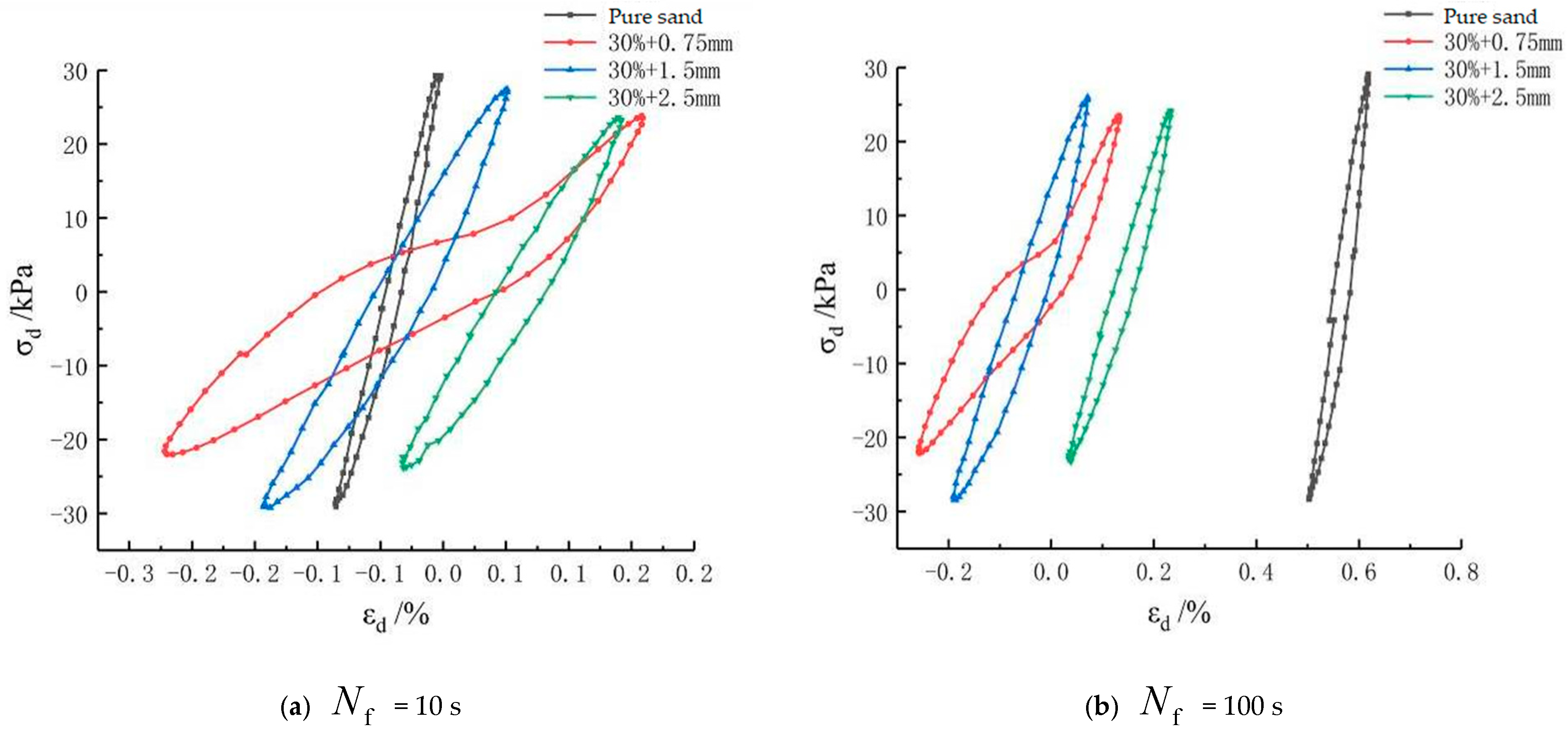
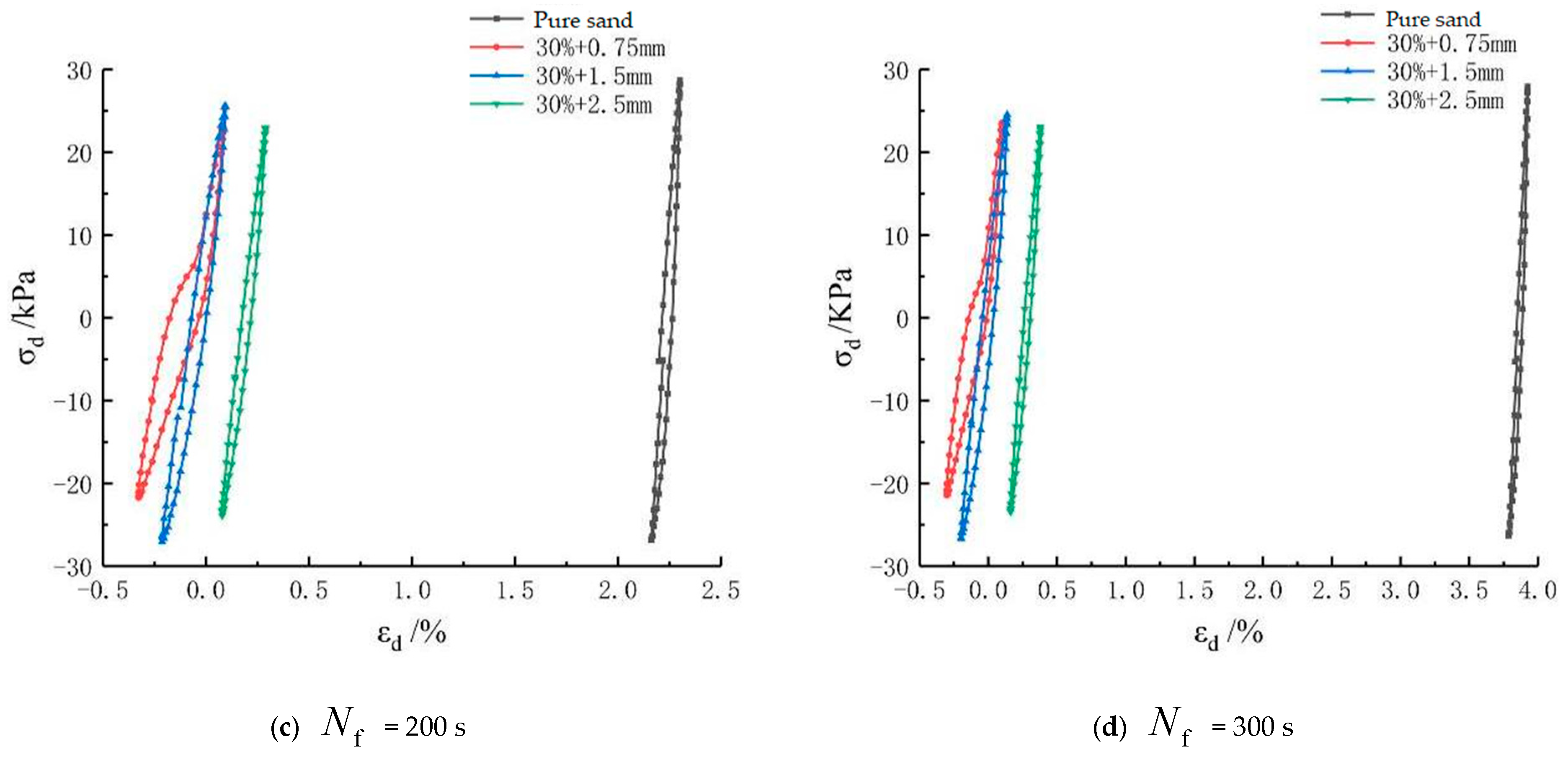
3.2. Change Rules of Hysteresis Curves under Graded Vibration Times
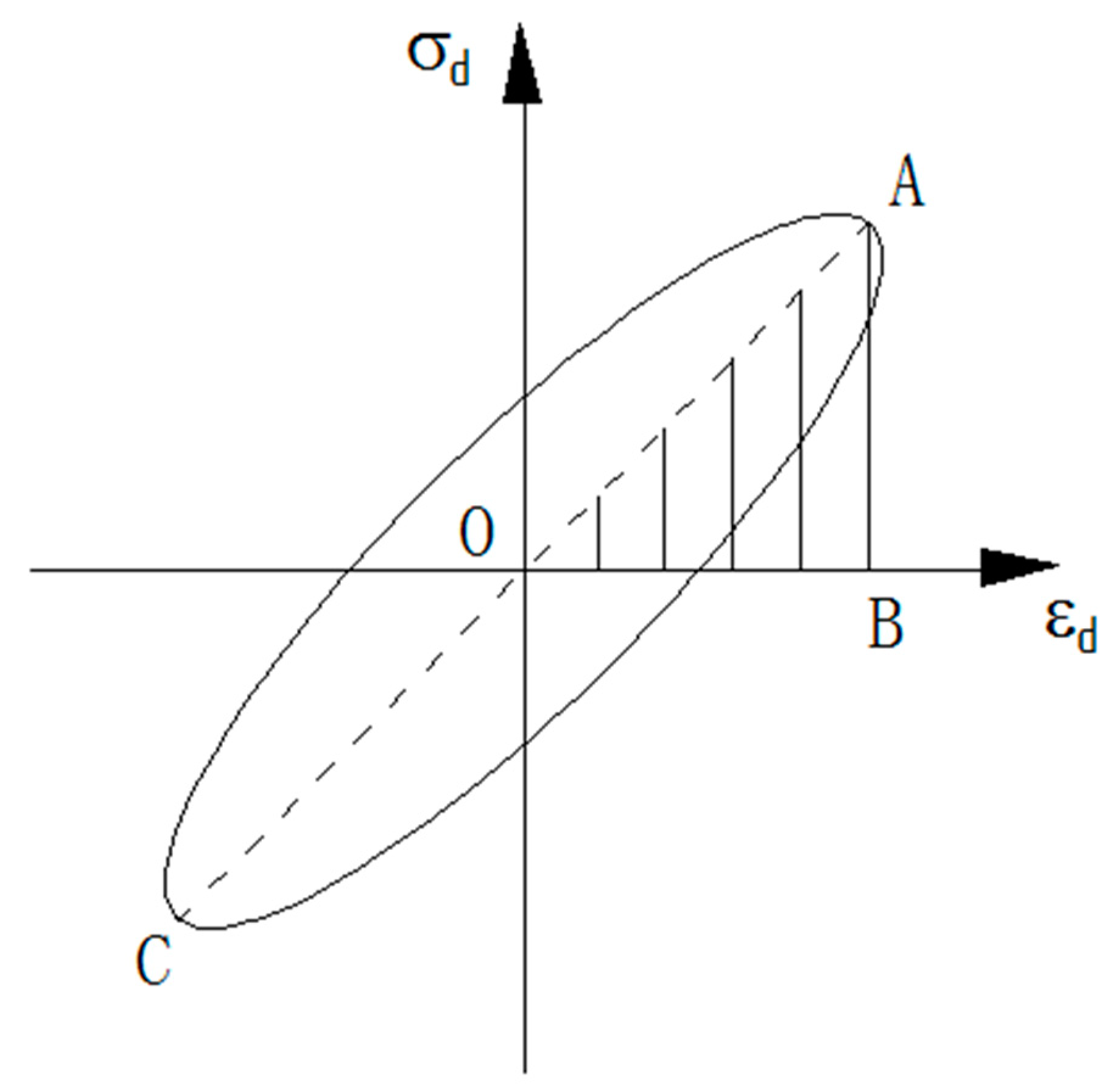
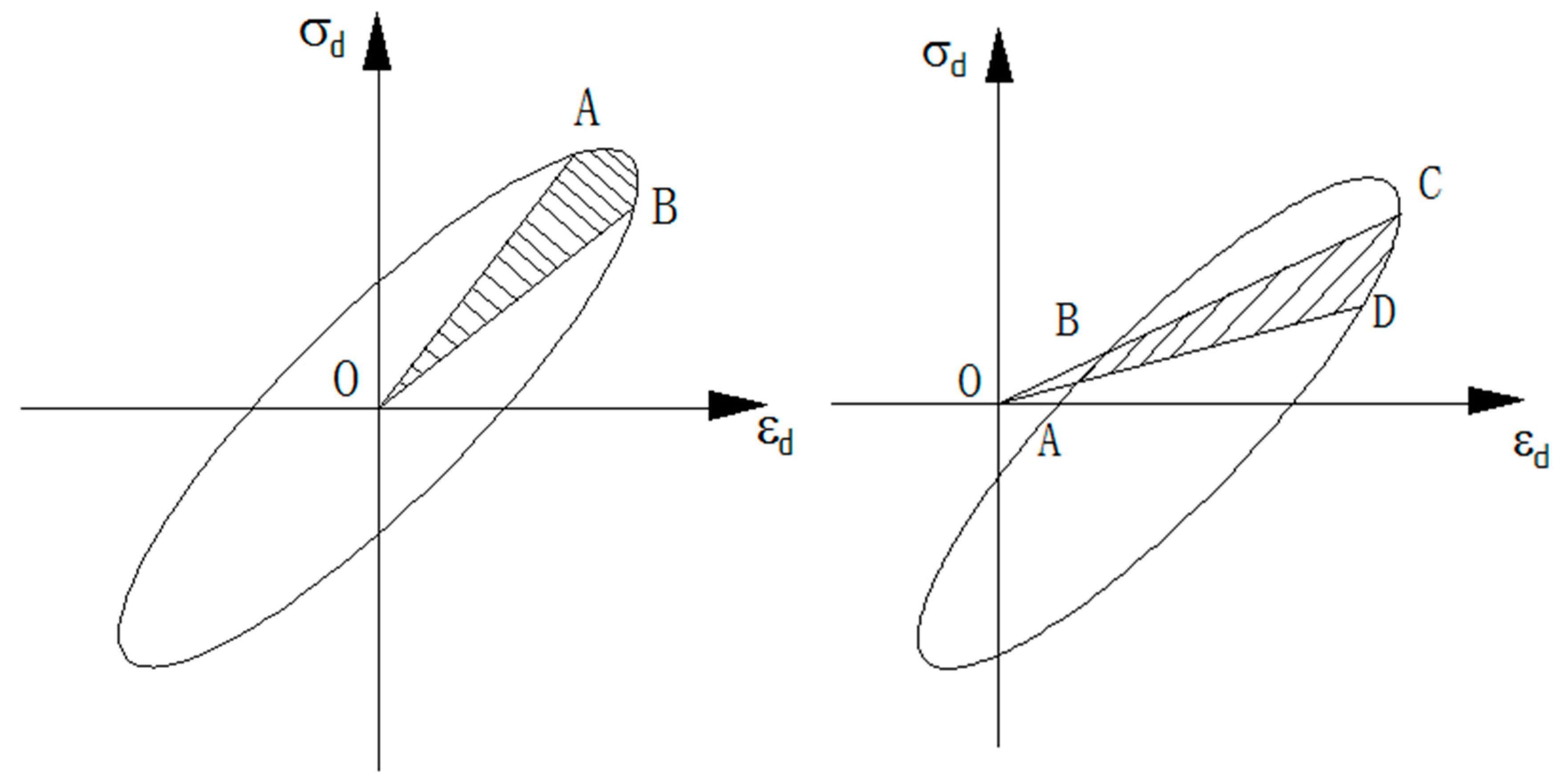
3.3. Change Rules of Dynamic Elastic Modulus and Damping Ratio of Hysteresis Curves
3.3.1. Change Rules of Dynamic Elastic Modulus
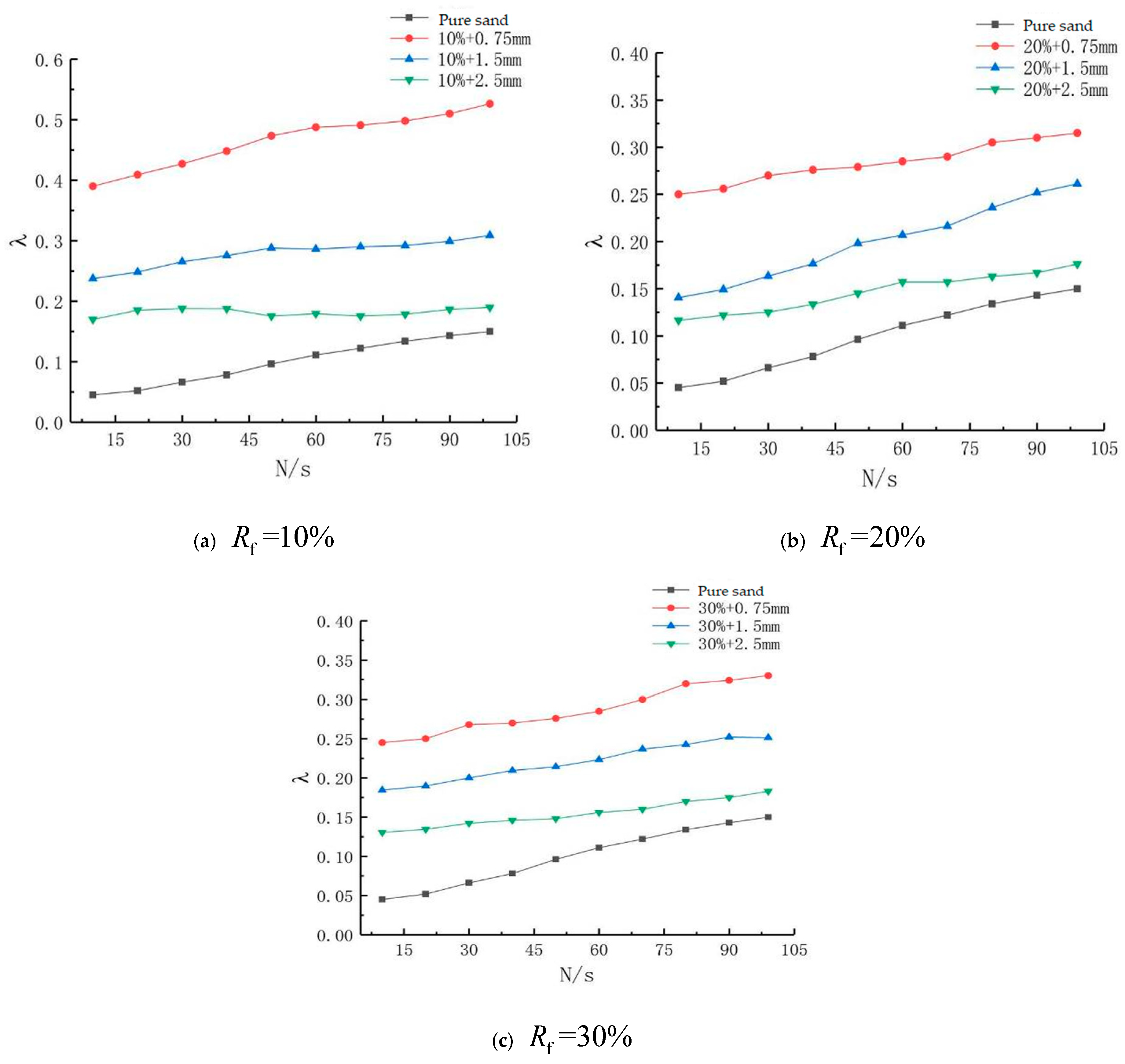
3.3.2. Change Rules of Damping Ratio
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, Z.Y.; Sutter, K.G. Dynamic properties of granulated rubber-sand mixtures. Geotech. Test. J. 2000, 23, 338–344. [Google Scholar]
- Pamukcu, S.; Akbulut, S. Thermoelastic enhancement of damping of sand using synthetic ground rubber. J. Geotech. Geoenviron. Eng. 2006, 132, 501–510. [Google Scholar] [CrossRef]
- Senetakis, K.; Anastasiadis, A.; Pitilakis, K. Dynamic properties of dry sand/rubber (SRM) and gravel/rubber (GRM) mixtures in a wide range of shearing strain amplitudes. Soil Dyn. Earthq. Eng. 2012, 33, 38–53. [Google Scholar] [CrossRef]
- Anastasiadis, A.; Senetakis, K.; Pitilakis, K. Small-strain shear modulus and damping ratio of sand-rubber and gravel-rubber mixtures. Geotech. Geol. Eng. 2012, 30, 363–382. [Google Scholar] [CrossRef]
- Anastasiadis, A.; Senetakis, K.; Pitilakis, K.; Gargala, C.; Karakasi, I.; Edil, T. Dynamic behavior of sand/rubber mixtures. Part I: Effect of rubber content and duration of confinement on small-strain shear modulus and damping ratio. J. ASTM Int. 2011, 9, 1–17. [Google Scholar]
- Senetakis, K.; Anastasiadis, A.; Pitilakis, K.; Souli, A.; Edil, T.; Dean, S.W. Dynamic behavior of sand/rubber mixtures, part II: Effect of rubber content on G/G0-γ-DT curves and volumetric threshold strain. J. ASTM Int. 2011, 9, 103711–103712. [Google Scholar] [CrossRef]
- Sui, X.X. The Study on Seismic Isolation Performance of Granulated Rubber-Sand Mixture; Huanan University: Changsha, China, 2009. [Google Scholar]
- Li, L.H.; Xiao, H.L.; Tang, H.M.; Hu, Q.Z.; Sun, M.J.; Sun, L. Dynamic properties variation of tire shred-soil mixtures. Rock Soil Mech. 2014, 35, 359–364. [Google Scholar]
- Shang, S.-P.; Sui, X.-X.; Zhou, Z.-J.; Liu, F.-C.; Xiong, W. Study of dynamic shear modulus of granulated rubber-sand mixture. Rock Soil Mech. 2010, 31, 377–381. [Google Scholar]
- Akbarimehr, D.; Eslami, A.; Aflaki, E. Geotechnical behaviour of clay soil mixed with rubber waste. J. Clean. Prod. 2020, 271, 122632. [Google Scholar] [CrossRef]
- Mase, L.Z.; Likitlersuang, S.; Tobita, T. Cyclic behaviour and liquefaction resistance of Izumio sands in Osaka, Japan. Mar. Georesour. Geotechnol. 2018, 37, 765–774. [Google Scholar] [CrossRef]
- Mase, L.Z. Shaking Table Test of Soil Liquefaction in Southern Yogyakarta. Int. J. Technol. 2017, 8, 747–760. [Google Scholar] [CrossRef]
- Mojtahedzadeh, N.; Ghalandarzadeh, A.; Motamed, R. Experimental evaluation of dynamic characteristics of Firouzkooh sand using cyclic triaxial and bender element tests. Int. J. Civ. Eng. 2021, 20, 125–138. [Google Scholar] [CrossRef]
- Cetin, H.; Söylemez, M. Soil-particle and pore orientations during drained and undrained shear of a cohesive sandy silt clay soil. Can. Geotech. J. 2004, 41, 1127–1138. [Google Scholar] [CrossRef]
- Chen, W.; Kong, L.W.; Zhu, J.Q. A simple method to approximately determine the damping ratio of soils. Rock Soil Mech. 2007, 28 (Suppl. 1), 789–791. [Google Scholar]
- Anvari, S.M.; Shooshpasha, I.; Kutanaei, S.S. Effect of granulated rubber on shear strength of fine-grained sand. J. Rock Mech. Geotech. Eng. 2017, 9, 936–944. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mixing Amount/% | Particle Size/mm | Consolidation Stress Ratio | Confining Pressure/kPa | Dynamic Stress/kPa |
|---|---|---|---|---|
| 10% | 0.75 | 1 | 50, 100, 150 | 30 |
| 1.5 | 1, 1.5, 2 | 50, 100, 150 | 30 | |
| 2.5 | 1 | 50, 100, 150 | 30 | |
| 20% | 0.75 | 1 | 50, 100, 150 | 30 |
| 1.5 | 1, 1.5, 2 | 50, 100, 150 | 30 | |
| 2.5 | 1 | 50, 100, 150 | 30 | |
| 30% | 0.75 | 1 | 50, 100, 150 | 30 |
| 1.5 | 1, 1.5, 2 | 50, 100, 150 | 30 | |
| 2.5 | 1 | 50, 100, 150 | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, F.; Bao, Y.; Yuan, H. Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand. Coatings 2022, 12, 1470. https://doi.org/10.3390/coatings12101470
Zhang Y, Liu F, Bao Y, Yuan H. Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand. Coatings. 2022; 12(10):1470. https://doi.org/10.3390/coatings12101470
Chicago/Turabian StyleZhang, Yunkai, Fei Liu, Yuhan Bao, and Haiyan Yuan. 2022. "Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand" Coatings 12, no. 10: 1470. https://doi.org/10.3390/coatings12101470
APA StyleZhang, Y., Liu, F., Bao, Y., & Yuan, H. (2022). Research on Dynamic Stress–Strain Change Rules of Rubber-Particle-Mixed Sand. Coatings, 12(10), 1470. https://doi.org/10.3390/coatings12101470