Simulation of Magnetic-Field-Induced Ion Motion in Vacuum Arc Deposition for Inner Surfaces of Tubular Workpiece


Abstract

1. Introduction
2. Materials and Methods
2.1. Simulation Setup
2.2. Setup of Ion-Neutral Collision
2.3. Boundary Condition and Meshing Scheme
2.4. Simulation Parameters of Ion Emission
3. Results
3.1. Magnetic Field Distribution
3.2. Magnetic-Field-Induced Motion of Ions
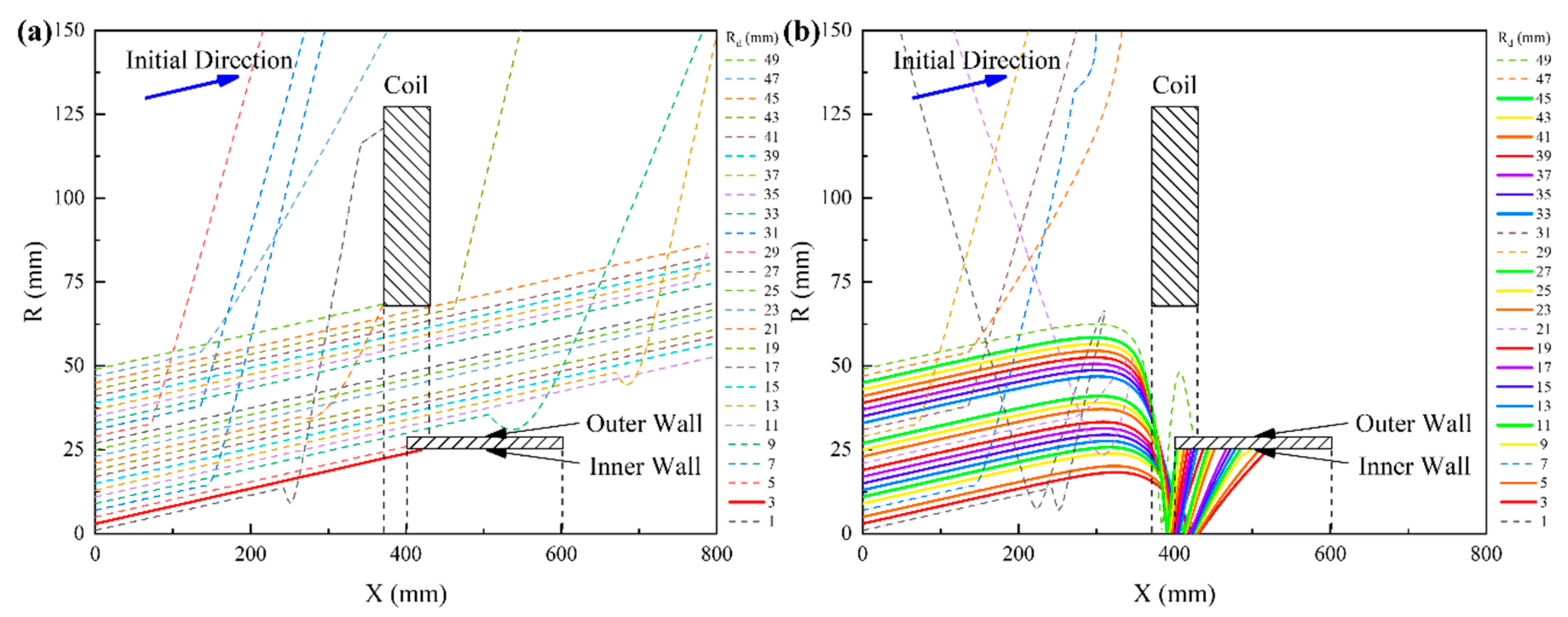
3.2.1. Effect of Magnetic Field on the Motion of Horizontally Emitted Ions
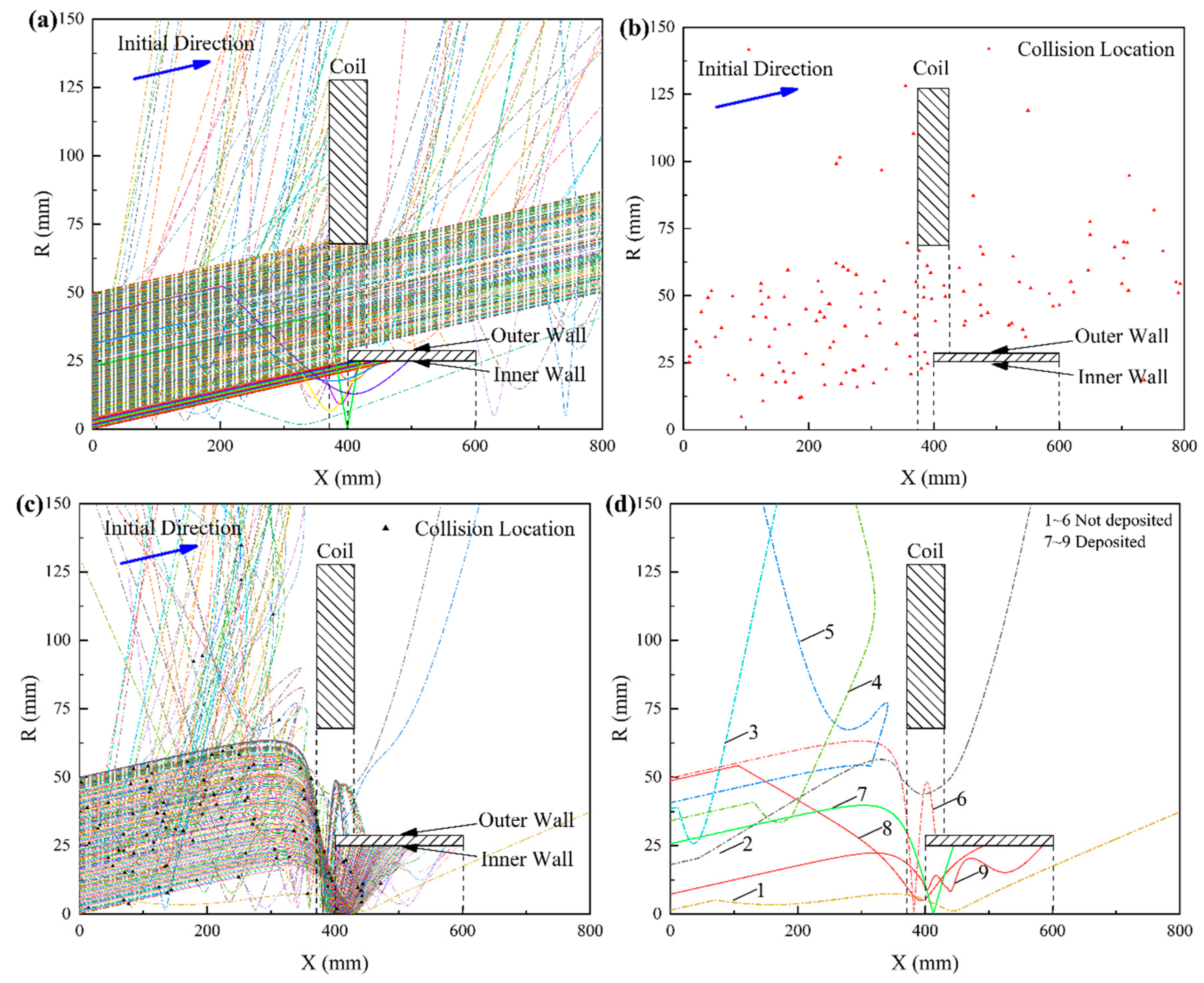
3.2.2. Effect of Magnetic Field on the Motion of Ions with Various Emission Angles
3.2.3. Effect of Magnetic Field on Deposition Ratio
3.3. Influence of Ion-Neutral Collision
4. Conclusions
- The trajectories of ions can be controlled via a magnetic field, and the ions can be deposited at different positions on the inner surface of the pipe by adjusting the magnetic flux density. The deposition ratio of the ions is low at low magnetic flux densities, and increases to a maximum value with an increase in the magnetic flux density. Further increasing the magnetic flux density leads to periodicity in the ions’ trajectories and the deposition ratio.
- The deposition depth of ions can be controlled by the magnetic flux density, ion emission radius and emission angle. When the magnetic flux density is relatively high, the deposition depth decreases as an exponential function of the magnetic flux density and ion emission radius, respectively. With an increase in the emission angle, the deposition depth decreases linearly. A numerical model was proposed to express the distribution of the deposition depth.
- The deposition efficiency and the depth of the inner surface can be improved by a magnetic field in an environment with a certain density of neutral gas. Ions that are affected by elastic collisions would either move into the pipe to deposit, or away from the pipe. The proportion of the ions moving into the pipe is relatively lower than that of ions moving away from the pipe.
Author Contributions
Funding
Conflicts of Interest
References
- Wei, R.; Rincon, C.; Booker, T.L.; Arps, J.H. Magnetic field enhanced plasma (MFEP) deposition of inner surfaces of tubes. Surf. Coat. Technol. 2004, 188–189, 691–696. [Google Scholar] [CrossRef]
- Wen, X.Q.; Wang, J. Deposition of diamond-like carbon films on the inner surface of narrow stainless steel tubes. Vacuum 2010, 85, 34–38. [Google Scholar] [CrossRef]
- Lusk, D.; Gore, M.; Boardman, W.; Casserly, T.; Boinapally, K.; Oppus, M.; Upadhyaya, D.; Tudhope, A.; Gupta, M.; Cao, Y.; et al. Thick DLC films deposited by PECVD on the internal surface of cylindrical substrates. Diam. Relat. Mater. 2008, 17, 1613–1621. [Google Scholar] [CrossRef]
- Hatada, R.; Flege, S.; Bobrich, A.; Ensinger, W.; Dietz, C.; Baba, K.; Sawase, T.; Watamoto, T.; Matsutani, T. Preparation of Ag-containing diamond-like carbon films on the interior surface of tubes by a combined method of plasma source ion implantation and DC sputtering. Appl. Surf. Sci. 2014, 310, 257–261. [Google Scholar] [CrossRef]
- Tian, X.B.; Jiang, H.F.; Gong, C.Z.; Yang, S.Q.; Fu, R.K.Y.; Chu, P.K. DLC deposition inside tubes using hollow cathode discharge plasma immersion ion implantation and deposition. Surf. Coat. Technol. 2010, 204, 2909–2912. [Google Scholar] [CrossRef]
- Lozovan, A.A.; Alexandrova, S.S.; Mishnev, M.A.; Prishepov, S.V. A study of the deposition process of multilayer coatings on the inner tube surface with the pulsed laser deposition technique. J. Alloys Compd. 2014, 586, S387–S390. [Google Scholar] [CrossRef]
- Baba, K.; Hatada, R.; Flege, S.; Ensinger, W. DLC coating of interior surfaces of steel tubes by low energy plasma source ion implantation and deposition. Appl. Surf. Sci. 2014, 310, 262–265. [Google Scholar] [CrossRef]
- Kawasaki, H.; Nishiguchi, H.; Furutani, T.; Ohshima, T.; Yagyu, Y.; Ihara, T.; Shinohara, M.; Suda, Y. Coating of inner surface of cylindrical pipe for hydrogen entry prevention using plasma process. Jpn. J. Appl. Phys. 2018, 57, 01AB02. [Google Scholar] [CrossRef]
- Anders, A. A review comparing cathodic arcs and high power impulse magnetron sputtering (HiPIMS). Surf. Coat. Technol. 2014, 257, 308–325. [Google Scholar] [CrossRef]
- Shi, C.L.; Zhang, M.; Lin, G.Q. Effect of pulsed bias on tin film deposition on internal wall of deep tubes by arc ion plating. Chin. J. Vac. Sci. Technol. 2007, 27, 517–521. [Google Scholar] [CrossRef]
- Boxman, R.L.; Beilis, I.I.; Gidalevich, E.; Zhitomirsky, V.N. Magnetic control in vacuum arc deposition: A review. IEEE Trans. Plasma Sci. 2005, 33, 1618–1625. [Google Scholar] [CrossRef]
- Beilis, I.I.; Sagi, B.; Zhitomirsky, V.; Boxman, R.L. Cathode spot motion in a vacuum arc with a long roof-shaped cathode under magnetic field. J. Appl. Phys. 2015, 117, 233303. [Google Scholar] [CrossRef]
- Benilov, M.S.; Kaufmann, H.T.C.; Hartmann, W.; Benilova, L.G. Revisiting Theoretical Description of the Retrograde Motion of Cathode Spots of Vacuum Arcs. IEEE Trans. Plasma Sci. 2019, 47, 3434–3441. [Google Scholar] [CrossRef]
- Chaar, A.B.B.; Syed, B.; Hsu, T.; Johansson-Jöesaar, M.; Andersson, J.M.; Henrion, G.; Johnson, L.J.S.; Mücklich, F.; Odén, M. The Effect of Cathodic Arc Guiding Magnetic Field on the Growth of (Ti0.36Al0.64)N Coatings. Coatings 2019, 9, 660. [Google Scholar] [CrossRef]
- Giuliani, L.; Minotti, F.; Grondona, D.; Kelly, H. On the Dynamics of the Plasma Entry and Guiding in a Straight Magnetized Filter of a Pulsed Vacuum Arc. IEEE Trans. Plasma Sci. 2007, 35, 1710–1716. [Google Scholar] [CrossRef]
- Wang, S.; Lin, Z.; Qiao, H.; Ba, D.; Zhu, L. Influence of a Scanning Radial Magnetic Field on Macroparticle Reduction of Arc Ion-Plated Films. Coatings 2018, 8, 49. [Google Scholar] [CrossRef]
- Paperny, V.L.; Krasov, V.I.; Lebedev, N.V.; Astrakchantsev, N.V.; Chernikch, A.A. Vacuum arc plasma mass separator. Plasma Sources Sci. Technol. 2014, 24, 15009. [Google Scholar] [CrossRef]
- Zhang, G.L.; Wang, J.L.; Wu, X.F.; Feng, W.R.; Chen, G.L.; Gu, W.C.; Niu, E.W.; Fan, S.H.; Liu, C.Z.; Yang, S.Z. Inner Surface Modification of a Tube by Magnetic Glow-Arc Plasma Source Ion Implantation. Chin. Phys. Lett. 2006, 23, 1241–1244. [Google Scholar] [CrossRef]
- Aksenov, I.I.; Khoroshikh, V.M.; Belous, V.A.; Leonov, S.A. Vacuum-arc systems for depositing drop-free coatings onto inner surfaces. Mater. Sci. Forum 1998, 287–288, 287–290. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, W.T.; Lin, G.Q. Magnetic field and tin film growth by arc ion plating on inner walls of deep tubes. Chin. J. Vac. Sci. Technol. 2011, 31, 71–75. [Google Scholar] [CrossRef]
- Arustamov, V.N.; Ashurov, K.B.; Kadirov, K.K.; Khudaykulov, I.K. Formation of technological plasma effect of vacuum-arc discharge on inner surface of metallic pipes and deposition of protective coats on them. In Proceedings of the 13th International Conference on Plasma Surface Engineering, Garmisch-Partenkirchen, Germany, 10–14 September 2012. [Google Scholar]
- Lang, W.C.; Gao, B.; Nan, X.R. Process Development of Films Deposited on Inner Wall of Long Tube by Arc Ion Plating. Appl. Mech. Mater. 2012, 152–154, 1705–1710. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, C.; Yang, W.; Chen, Y.; Yu, B. TiN films deposition inside stainless-steel tubes using magnetic field-enhanced arc ion plating. Vacuum 2015, 112, 46–54. [Google Scholar] [CrossRef]
- Kostrin, D.K.; Lisenkov, A.A. Plasmachemical synthesis of coatings using a vacuum arc discharge. Vak. Forsch. Prax. 2017, 29, 35–39. [Google Scholar] [CrossRef]
- Birdsall, C.K.; Langdon, A.B. Plasma Physics via Computer Simulation, 1st ed.; McGraw-Hill: New York, NY, USA, 1991; pp. 27–47. [Google Scholar]
- Skullerud, H.R. The stochastic computer simulation of ion motion in a gas subjected to a constant electric field. J. Phys. D Appl. Phys. 1968, 1, 1567–1568. [Google Scholar] [CrossRef]
- Li, H.; Sun, L.; Wu, G.; Dai, W.; Zhou, Y.; Wang, A.Y. Simulation of magnetic field distribution in doubly-bent filter cathode of vacuum arc film growth setup. Chin. J. Vac. Sci. Technol. 2010, 30, 614–620. [Google Scholar] [CrossRef]
- Takahashi, K.; Uchino, T.; Ikegami, K.; Sasaki, T.; Kikuchi, T.; Harada, N. Behavior of Laser Ablation Plasma During Transport in Multicusp Magnetic Field Using Different Targets for Laser Ion Source. Energy Procedia 2017, 131, 354–358. [Google Scholar] [CrossRef]
- Kanaya, K.; Kawakatsu, H. Secondary electron emission due to primary and backscattered electrons. J. Phys. D Appl. Phys. 1972, 5, 1727–1742. [Google Scholar] [CrossRef]
- Jin, J.M. The Finite Element Method in Electromagnetics, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2014; pp. 10–52. [Google Scholar]
- Chung, J.; Hulbert, G.M. A time integration algorithm for structural dynamics with improved numerical dissipation: The generalized-α method. J. Appl. Mech. 1993, 60, 371–375. [Google Scholar] [CrossRef]
- Lieberman, M.A.; Lichtenberg, A.J. Principles of Plasma Discharges and Materials Processing, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2005; pp. 157–167. [Google Scholar]
- Li, Y.; Jing, X.; Yuan, Q.; Li, J. Numerical Analysis of Magnetized Sheath for Inner Surface Modification. IEEE Access 2019, 7, 53147–53151. [Google Scholar] [CrossRef]
- Hershkowitz, N. Sheaths: More complicated than you think. Phys. Plasmas 2005, 12, 55502. [Google Scholar] [CrossRef]
- Baalrud, S.D. Influence of ion streaming instabilities on transport near plasma boundaries. Plasma Sources Sci. Technol. 2016, 25, 25008. [Google Scholar] [CrossRef]
- Bohm, D. Minimum ionic kinetic energy for a stable sheath. In The Characteristics of Electrical Discharges in Magnetic Fields, 1st ed.; Guthry, A., Wakerling, R.K., Eds.; McGraw-Hill: New York, NY, USA, 1949; Volume 144, pp. 209–250. [Google Scholar]
- Chodura, R. Plasma-wall transition in an oblique magnetic field. Phys. Fluids 1982, 25, 1628. [Google Scholar] [CrossRef]
- Kim, G.H.; Hershkowitz, N.; Diebold, D.A.; Cho, M.H. Magnetic and collisional effects on presheaths. Phys. Plasmas 1995, 2, 3222–3233. [Google Scholar] [CrossRef]
- Aksenov, I.I.; Strel’Nitskij, V.E.; Vasilyev, V.V.; Zaleskij, D.Y. Efficiency of magnetic plasma filters. Surf. Coat. Technol. 2003, 163–164, 118–127. [Google Scholar] [CrossRef]
- Ristivojevic, Z.; Petrović, Z.L. A Monte Carlo simulation of ion transport at finite temperatures. Plasma Sources Sci. Technol. 2012, 21, 35001. [Google Scholar] [CrossRef]
- Astley, R.J. Infinite elements for wave problems: A review of current formulations and an assessment of accuracy. Int. J. Numer. Meth. Eng. 2000, 49, 951–976. [Google Scholar] [CrossRef]
- Burnett, D.S. A three-dimensional acoustic infinite element based on a prolate spheroidal multipole expansion. J. Acoust. Soc. Am. 1994, 96, 2798–2816. [Google Scholar] [CrossRef]
- Jüttner, B. Cathode spots of electric arcs. J. Phys. D Appl. Phys. 2001, 34, R103–R123. [Google Scholar] [CrossRef]
- Kutzner, J.; Miller, H.C. Integrated ion flux emitted from the cathode spot region of a diffuse vacuum arc. J. Phys. D Appl. Phys. 1992, 25, 686–693. [Google Scholar] [CrossRef]
- Byon, E.; Anders, A. Ion energy distribution functions of vacuum arc plasmas. J. Appl. Phys. 2003, 93, 1899–1906. [Google Scholar] [CrossRef]
- Boxman, R.L.; Sanders, D.; Martin, P. Handbook of Vacuum arc Science and Technology, 1st ed.; NOYES Publications: Parkridge, NJ, USA, 1995; pp. 151–256. [Google Scholar]
- Aksenov, I.I.; Khoroshikh, V.M. Angular distributions of ions in a plasma stream of a steady-state vacuum arc. In Proceedings of the ISDEIV 18th International Symposium on Discharges and Electrical Insulation in Vacuum, Eindhoven, The Netherlands, 1 January 1998. [Google Scholar] [CrossRef]
- Anders, A.; Yushkov, G.Y. Angularly resolved measurements of ion energy of vacuum arc plasmas. Appl. Phys. Lett. 2002, 80, 2457–2459. [Google Scholar] [CrossRef]
- Heberlein, J.V.R.; Porto, D.R. The Interaction of Vacuum Arc Ion Currents with Axia I Magnetic Fields. IEEE Trans. Plasma Sci. 1983, 3, 152–159. [Google Scholar] [CrossRef]
- Purcell, E.M. Electricity and Magnetism, 2nd ed.; McGraw-Hill: New York, NY, USA, 1985; pp. 226–231. [Google Scholar]
- Cohen, S.A.; Siefert, N.S.; Stange, S.; Boivin, R.F.; Scime, E.E.; Levinton, F.M. Ion acceleration in plasmas emerging from a helicon-heated magnetic-mirror device. Phys. Plasmas 2003, 10, 2593–2598. [Google Scholar] [CrossRef]
- Boercker, D.B.; Sanders, D.M.; Storer, J.; Falabella, S. Modeling plasma flow in straight and curved solenoids. J. Appl. Phys. 1991, 69, 115–120. [Google Scholar] [CrossRef]
- Cluggish, B.P. Transport of a cathodic arc plasma in a straight, magnetized duct. IEEE Trans. Plasma Sci. 1998, 26, 1645–1652. [Google Scholar] [CrossRef]
- Kelly, H.; Giuliani, L.; Rausch, F. Characterization of the ion emission in a pulsed vacuum arc with an axial magnetic field. J. Phys. D Appl. Phys. 2003, 36, 1980–1986. [Google Scholar] [CrossRef]
- Zhitomirsky, V.N.; Zarchin, O.; Boxman, R.L.; Goldsmith, S. Transport of a vacuum arc produced plasma beam in a magnetized cylindrical duct. IEEE Trans. Plasma Sci. 2003, 31, 977–982. [Google Scholar] [CrossRef]
- Nagelkerke, N.J.D. A Note on a General Definition of the Coefficient of Determination. Biometrika 1991, 78, 691–692. [Google Scholar] [CrossRef]
- Eriksson, A.O.; Mraz, S.; Jensen, J.; Hultman, L.; Zhirkov, I.; Schneider, J.M.; Rosen, J. Influence of Ar and N2 Pressure on Plasma Chemistry, Ion Energy, and Thin Film Composition During Filtered Arc Deposition From Ti3SiC2 Cathodes. IEEE Trans. Plasma Sci. 2014, 42, 3498–3507. [Google Scholar] [CrossRef]
- Aksenov, I.I.; Belous, V.A.; Zadneprovskiy, Y.A.; Kuprin, A.S.; Lomino, N.S.; Ovcharenko, V.D.; Sobol, O.V. Influence of Nitrogen Pressure on Silicon Content in Ti-Si-N Coatings Deposited by the Vacuum-Arc Method. In Proceedings of the XXIVth Int. Symp. on Discharges and Electrical Insulation in Vacuum, Braunschweig, Germany, 30 August–3 September 2010. [Google Scholar] [CrossRef]
- Goldberg, O.; Goldenberg, E.; Zhitomirsky, V.N.; Cohen, S.R.; Boxman, R.L. Zirconium vacuum arc operation in a mixture of Ar and O2 gases: Ar effect on the arcing characteristics, deposition rate and coating properties. Surf. Coat. Technol. 2012, 206, 4417–4424. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coil Cross-Section (mm × mm) | Wire Cross-Section Area (mm2) | Coil Inner Diameter (mm) | Coil Outer Diameter (mm) |
| 60 × 60 | 1 | 135 | 255 |
| Source Diameter (mm) | Pipe Inner Diameter (mm) | Pipe Length (mm) | Pipe Wall Thickness (mm) |
| 100 | 50 | 200 | 4 |
| Ion Mass (kg) | Ion Charge State | Initial Kinetic Energy (eV) | Simulation Timespan (s) |
|---|---|---|---|
| 7.95 × 10−26 | +2 [43] | 100 [44,45] | 1 × 10−4 |
| Characteristic Magnetic Flux Density (Gs) | Adjusted Coefficient | Characteristic Magnetic Flux Density (Gs) | Adjusted Coefficient |
|---|---|---|---|
| 1035 | 0.998 | 2530 | 0.571 |
| 1150 | 0.954 | 2622 | 0.121 |
| 1380 | 0.791 | 2760 | 0.125 |
| 1610 | 0.976 | 2990 | 0.591 |
| 1840 | 0.991 | 3450 | 0.708 |
| 2070 | 0.976 | 4600 | 0.008 |
| 2300 | 0.714 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Yang, Y.; Shao, T.; Cheng, B.; Zhao, Q.; Shang, H. Simulation of Magnetic-Field-Induced Ion Motion in Vacuum Arc Deposition for Inner Surfaces of Tubular Workpiece. Coatings 2020, 10, 1053. https://doi.org/10.3390/coatings10111053
Wang T, Yang Y, Shao T, Cheng B, Zhao Q, Shang H. Simulation of Magnetic-Field-Induced Ion Motion in Vacuum Arc Deposition for Inner Surfaces of Tubular Workpiece. Coatings. 2020; 10(11):1053. https://doi.org/10.3390/coatings10111053
Chicago/Turabian StyleWang, Tiancheng, Yulei Yang, Tianmin Shao, Bingxue Cheng, Qian Zhao, and Hongfei Shang. 2020. "Simulation of Magnetic-Field-Induced Ion Motion in Vacuum Arc Deposition for Inner Surfaces of Tubular Workpiece" Coatings 10, no. 11: 1053. https://doi.org/10.3390/coatings10111053
APA StyleWang, T., Yang, Y., Shao, T., Cheng, B., Zhao, Q., & Shang, H. (2020). Simulation of Magnetic-Field-Induced Ion Motion in Vacuum Arc Deposition for Inner Surfaces of Tubular Workpiece. Coatings, 10(11), 1053. https://doi.org/10.3390/coatings10111053