A Portable UV-LED/RGB Sensor for Real-Time Bacteriological Water Quality Monitoring Using ML-Based MPN Estimation



Abstract
1. Introduction
2. Materials and Methods
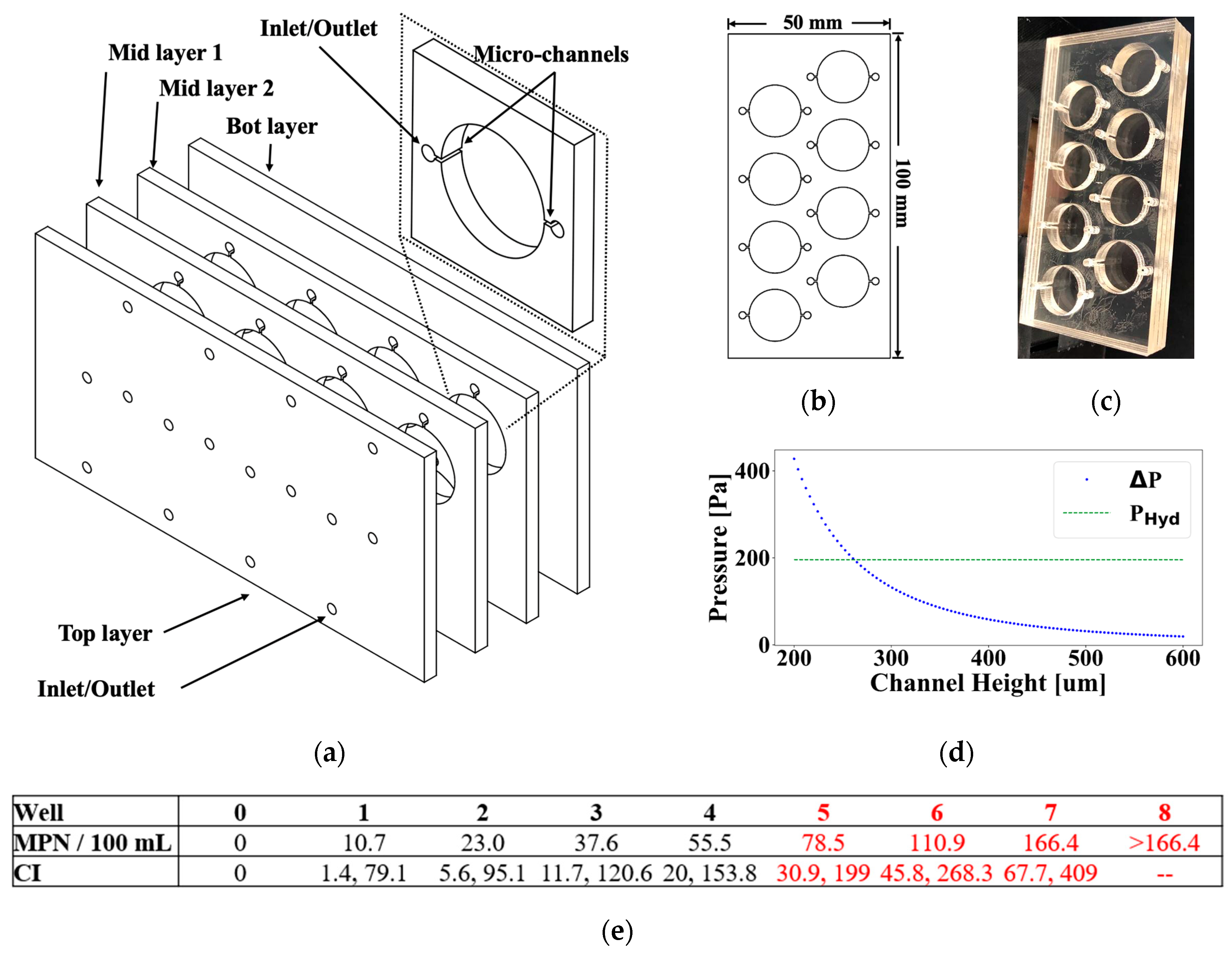
2.1. Microfluidic Device Design and Loading
2.2. Portable Temperature-Controlled Incubation and UV-LED/RGB Excitation and Emission System for Bacterial Detection
2.3. Machine Learning (ML) Algorithms
3. Results and Discussion
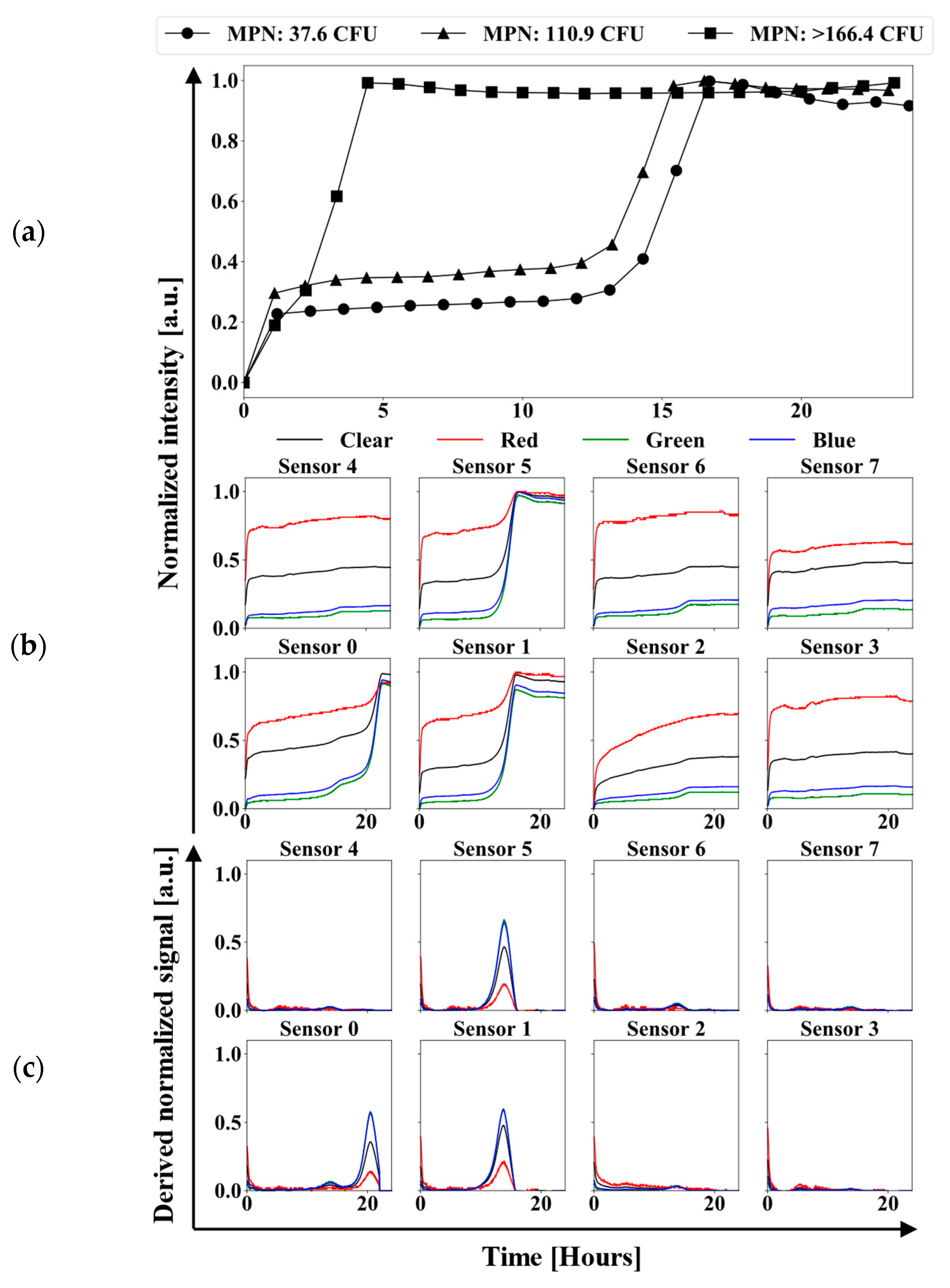
3.1. UV-LED/RGB System
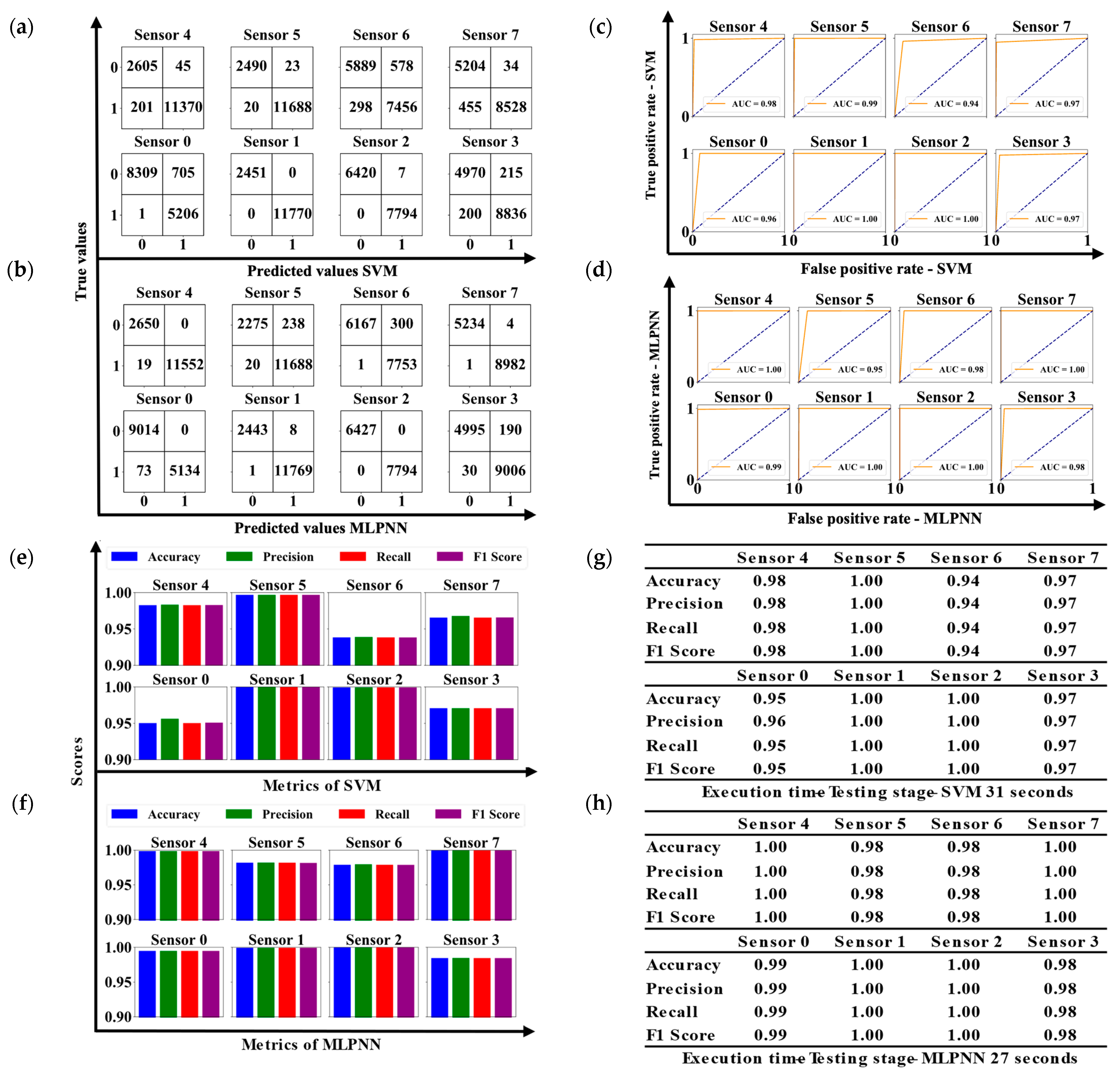
3.2. Machine Learning Algorithms
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MPN | Most probable number |
| CFU | Colony Forming Units |
| AI | Artificial intelligence |
| ML | Machine learning |
| MLPNN | Multilayer perceptron neural network |
| SVM | Support Vector Machine |
| RGB | Red–green–blue |
| UV/LED | Ultraviolet light-emitting diode |
| EPA | Environmental Protection Agency |
| pH | Potential of hydrogen |
| EC | Electrical conductivity |
| Turb | Turbidity |
| TDS | Total dissolved solids |
| TPh | Total phosphorus |
| TNit | Total nitrogen |
| DO | Dissolved oxygen |
| 2012 RWQC | 2012 Recreational Water Quality Criteria |
| BAV | Beach Action Value |
| MTF | Multitube fermentation |
| MF | Membrane filtration |
| RPA | Recombinase polymerase amplification |
| LFA | Lateral flow assay |
| RF | Random Forest |
| MLR | Multiple linear regression |
| WQI | Water quality index |
| TP | True positives |
| TN | True negatives |
| FP | False positives |
| FN | False negatives |
| ROC | Receiver operating characteristic |
| AUC | Areas under the curve |
References
- Collier, S.A.; Deng, L.; Adam, E.A.; Benedict, K.M.; Beshearse, E.M.; Blackstock, A.J.; Bruce, B.B.; Derado, G.; Edens, C.; Fullerton, K.E.; et al. Estimate of burden and direct healthcare cost of infectious waterborne disease in the United States. Emerg. Infect. Dis. 2021, 27, 140–149. [Google Scholar] [CrossRef] [PubMed]
- Fazal-ur-Rehman, M. Polluted Water Borne Diseases: Symptoms, Causes, Treatment and Prevention. J. Med. Chem. Sci. 2019, 2, 21–26. [Google Scholar] [CrossRef]
- Abel, P.D. Water Pollution Biology, 2nd ed.; Taylor & Francis Ltd.: Philadelphia, DA, USA, 1996; Volume 21, No. 5. [Google Scholar] [CrossRef]
- Paepae, T.; Bokoro, P.N.; Kyamakya, K. From Fully Physical to Virtual Sensing for Water Quality Assessment: A Comprehensive Review of the Relevant State-of-the-Art. Sensors 2021, 21, 6971. [Google Scholar] [CrossRef] [PubMed]
- Lugo, J.L.; Lugo, E.R.; de la Puente, M. A systematic review of microorganisms as indicators of recreational water quality in natural and drinking water systems. J. Water Health 2021, 19, 20–28. [Google Scholar] [CrossRef]
- Brackett, R.E. Microbial Quality. In Postharvest Handling; Elsevier: Amsterdam, The Netherlands, 1993; pp. 125–148. [Google Scholar] [CrossRef]
- U.S. Environmental Protection Agency. Recreational Water Quality Criteria; EPA: Washington, DC, USA, 2012; pp. 1–69, [Online]. Available online: https://www.epa.gov/sites/default/files/2015-10/documents/rwqc2012.pdf (accessed on 21 February 2025).
- Zulkifli, S.N.; Rahim, H.A.; Lau, W.-J. Detection of contaminants in water supply: A review on state-of-the-art monitoring technologies and their applications. Sens. Actuators B Chem. 2018, 255, 2657–2689. [Google Scholar] [CrossRef]
- Rodrigues, C.; Cunha, M.Â. Assessment of the microbiological quality of recreational waters: Indicators and methods. EuroMediterr J. Environ. Integr. 2017, 2, 25. [Google Scholar] [CrossRef]
- IDEXX-Laboratories. Enterolert: Procedure; IDEXX Laboratories, Inc.: Westbrook, ME, USA, 2015. [Google Scholar]
- Ramoutar, S. The use of Colilert-18, Colilert and Enterolert for the detection of faecal coliform, Escherichia coli and Enterococci in tropical marine waters, Trinidad and Tobago. Reg. Stud. Mar. Sci. 2020, 40, 101490. [Google Scholar] [CrossRef]
- James, R.; Lorch, D.; Pala, S.; Dindal, A.; John, B. McKernan, Environmental Technology Verification Report COLIFAST ALARM AT-LINE AUTOMATED REMOTE MONITOR. [Online]. Available online: https://archive.epa.gov/nrmrl/archive-etv/web/pdf/p100bswr.pdf (accessed on 21 February 2025).
- Tryland, I.; Eregno, F.E.; Braathen, H.; Khalaf, G.; Sjølander, I.; Fossum, M. On-Line monitoring of Escherichia coli in raw water at oset drinking water treatment plant, Oslo (Norway). Int. J. Environ. Res. Public Health 2015, 12, 1788–1802. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, C.; Ye, R.; Duan, Q. Advances on water quality detection by uv-vis spectroscopy. Appl. Sci. 2020, 10, 6874. [Google Scholar] [CrossRef]
- Goblirsch, T.; Mayer, T.; Penzel, S.; Rudolph, M.; Borsdorf, H. In Situ Water Quality Monitoring Using an Optical Multiparameter Sensor Probe. Sensors 2023, 23, 9545. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, L.; Wang, S.; Zhang, L.S. Online water quality monitoring based on UV–Vis spectrometry and artificial neural networks in a river confluence near Sherfield-on-Loddon. Environ. Monit. Assess 2022, 194, 630. [Google Scholar] [CrossRef] [PubMed]
- Lyu, Y.; Zhao, W.; Kinouchi, T.; Nagano, T.; Tanaka, S. Development of statistical regression and artificial neural network models for estimating nitrogen, phosphorus, COD, and suspended solid concentrations in eutrophic rivers using UV–Vis spectroscopy. Environ. Monit. Assess 2023, 195, 1114. [Google Scholar] [CrossRef] [PubMed]
- Parra, L.; Ahmad, A.; Sendra, S.; Lloret, J.; Lorenz, P. Combination of Machine Learning and RGB Sensors to Quantify and Classify Water Turbidity. Chemosensors 2024, 12, 34. [Google Scholar] [CrossRef]
- Sampedro, Ó.; Salgueiro, J.R. Turbidimeter and RGB sensor for remote measurements in an aquatic medium. Measurement 2015, 68, 128–134. [Google Scholar] [CrossRef]
- Benavides, M.; Mailier, J.; Hantson, A.-L.; Muñoz, G.; Vargas, A.; Van Impe, J.; Wouwer, A.V. Design and test of a low-cost RGB sensor for online measurement of microalgae concentration within a photo-bioreactor. Sensors 2015, 15, 4766–4780. [Google Scholar] [CrossRef]
- Pazzi, B.M.; Pistoia, D.; Alberti, G. RGB-Detector: A Smart, Low-Cost Device for Reading RGB Indexes of Microfluidic Paper-Based Analytical Devices. Micromachines 2022, 13, 1585. [Google Scholar] [CrossRef]
- Jiang, H.; Sun, B.; Jin, Y.; Feng, J.; Zhu, H.; Wang, L.; Zhang, S.; Yang, Z. A Disposable Multiplexed Chip for the Simultaneous Quantification of Key Parameters in Water Quality Monitoring. ACS Sens. 2020, 5, 3013–3018. [Google Scholar] [CrossRef]
- Gowda, H.N.; Kido, H.; Wu, X.; Shoval, O.; Lee, A.; Lorenzana, A.; Madou, M.; Hoffmann, M.; Jiang, S.C. Development of a proof-of-concept microfluidic portable pathogen analysis system for water quality monitoring. Sci. Total Environ. 2022, 813, 152556. [Google Scholar] [CrossRef]
- Batra, A.R.; Cottam, D.; Lepesteur, M.; Dexter, C.; Zuccala, K.; Martino, C.; Khudur, L.; Daniel, V.; Ball, A.S.; Soni, S.K. Development of A Rapid, Low-Cost Portable Detection Assay for Enterococci in Wastewater and Environmental Waters. Microorganisms 2023, 11, 381. [Google Scholar] [CrossRef]
- Jung, A. The Basics of Machine Learning. NEJM Evid. 2022, 1, 62. [Google Scholar] [CrossRef]
- Clere, A.; Bansal, V. Machine Learning with Dynamics 365 and Power Platform, 2022nd ed.; Wiley: Hoboken, NJ, USA, 2022. [Google Scholar]
- Chen, Y.; Song, L.; Liu, Y.; Yang, L.; Li, D. A review of the artificial neural network models for water quality prediction. Appl. Sci. 2020, 10, 5776. [Google Scholar] [CrossRef]
- Sekulić, A.; Kilibarda, M.; Heuvelink, G.B.M.; Nikolić, M.; Bajat, B. Random forest spatial interpolation. Remote Sens. 2020, 12, 1687. [Google Scholar] [CrossRef]
- Xu, B.; Huang, J.Z.; Williams, G.; Wang, Q.; Ye, Y. Classifying very high-dimensional data with random forests built from small subspaces. Int. J. Data Warehous. Min. 2012, 8, 44–63. [Google Scholar] [CrossRef]
- Jafar, R.; Awad, A.; Hatem, I.; Jafar, K.; Awad, E.; Shahrour, I. Multiple Linear Regression and Machine Learning for Predicting the Drinking Water Quality Index in Al-Seine Lake. Smart Cities 2023, 6, 2807–2827. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, C.; Qiao, Q.; Li, X.; Wang, F.; Li, C. Application of Improved Particle Swarm Optimization SVM in Water Quality Evaluation of Ming Cui Lake. Sustainability 2023, 15, 9835. [Google Scholar] [CrossRef]
- Jarvis, B.; Wilrich, C.; Wilrich, P.-T. Reconsideration of the derivation of Most Probable Numbers, their standard deviations, confidence bounds and rarity values. J. Appl. Microbiol. 2010, 109, 4792. [Google Scholar] [CrossRef]
- Reddy, B.H.; Karthikeyan, P.R. Classification of Fire and Smoke Images using Decision Tree Algorithm in Comparison with Logistic Regression to Measure Accuracy, Precision, Recall, F-score. In Proceedings of the 14th International Conference on Mathematics, Actuarial Science, Computer Science and Statistics, MACS 2022, Karachi, Pakistan, 12–13 November 2022; pp. 1–5. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pellet [CFU] | Quanti-Tray/2000 [CFU] | UV-LED/RGB System [CFU] |
|---|---|---|
| 50–80 | 35.0 | 37.6 |
| 50–80 | 31.7 | 37.6 |
| 50–80 | 39.9 | 37.6 |
| 50–80 | 42.0 | 110.9 |
| 80–120 | 84.8 | 23.0 |
| 80–120 | 70.6 | 55.5 |
| 80–120 | 90.8 | 166.4 |
| 130–300 | 165.8 | 110.9 |
| 3000–7000 | >2419.6 | >166.4 |
| 50,000–150,000 | >2419.6 | >166.4 |
| ML Algorithms | Time in Lag Phase [hours] | Evaluation Metrics | Sensors | |||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |||
| MLPNN | 3 | Accuracy | 0.99 | 1.00 | 0.99 | 0.81 | 0.94 | 0.96 | 0.93 | 0.91 |
| Precision | 0.99 | 1.00 | 0.99 | 0.86 | 0.95 | 0.96 | 0.93 | 0.93 | ||
| Recall | 0.99 | 1.00 | 0.99 | 0.81 | 0.94 | 0.96 | 0.93 | 0.91 | ||
| F1 Score | 0.99 | 1.00 | 0.99 | 0.79 | 0.94 | 0.96 | 0.93 | 0.91 | ||
| 2 | Accuracy | 0.98 | 1.00 | 0.99 | 0.81 | 0.97 | 0.94 | 0.95 | 0.96 | |
| Precision | 0.98 | 1.00 | 0.99 | 0.83 | 0.97 | 0.94 | 0.95 | 0.96 | ||
| Recall | 0.98 | 1.00 | 0.99 | 0.81 | 0.97 | 0.94 | 0.95 | 0.96 | ||
| F1 Score | 0.98 | 1.00 | 0.99 | 0.80 | 0.00 | 0.93 | 0.95 | 0.96 | ||
| 1 | Accuracy | 0.95 | 1.00 | 0.97 | 0.79 | 1.00 | 0.96 | 0.92 | 0.92 | |
| Precision | 0.95 | 1.00 | 0.97 | 0.79 | 1.00 | 0.96 | 0.92 | 0.92 | ||
| Recall | 0.95 | 1.00 | 0.97 | 0.79 | 1.00 | 0.96 | 0.92 | 0.92 | ||
| F1 Score | 0.95 | 1.00 | 0.97 | 0.79 | 0.00 | 0.96 | 0.92 | 0.92 | ||
| 0.5 | Accuracy | 0.93 | 0.99 | 0.96 | 0.77 | 1.00 | 0.92 | 0.77 | 0.72 | |
| Precision | 0.94 | 0.99 | 0.96 | 0.76 | 1.00 | 0.92 | 0.78 | 0.73 | ||
| Recall | 0.93 | 0.99 | 0.96 | 0.77 | 1.00 | 0.92 | 0.77 | 0.72 | ||
| F1 Score | 0.93 | 0.99 | 0.96 | 0.76 | 0.00 | 0.92 | 0.77 | 0.72 | ||
| SVM | 3 | Accuracy | 1.00 | 1.00 | 0.94 | 0.81 | 1.00 | 0.99 | 0.95 | 0.97 |
| Precision | 1.00 | 1.00 | 0.94 | 0.85 | 1.00 | 0.99 | 0.95 | 0.97 | ||
| Recall | 1.00 | 1.00 | 0.94 | 0.81 | 1.00 | 0.99 | 0.95 | 0.97 | ||
| F1 Score | 1.00 | 1.00 | 0.94 | 0.79 | 1.00 | 0.99 | 0.95 | 0.97 | ||
| 2 | Accuracy | 1.00 | 1.00 | 0.91 | 0.84 | 1.00 | 0.99 | 0.96 | 0.99 | |
| Precision | 1.00 | 1.00 | 0.92 | 0.87 | 1.00 | 0.99 | 0.96 | 0.99 | ||
| Recall | 1.00 | 1.00 | 0.91 | 0.84 | 1.00 | 0.99 | 0.96 | 0.99 | ||
| F1 Score | 1.00 | 1.00 | 0.91 | 0.83 | 1.00 | 0.99 | 0.96 | 0.99 | ||
| 1 | Accuracy | 1.00 | 1.00 | 0.90 | 0.81 | 1.00 | 0.98 | 0.94 | 0.97 | |
| Precision | 1.00 | 1.00 | 0.90 | 0.84 | 1.00 | 0.98 | 0.95 | 0.97 | ||
| Recall | 1.00 | 1.00 | 0.90 | 0.81 | 1.00 | 0.98 | 0.94 | 0.97 | ||
| F1 Score | 1.00 | 1.00 | 0.90 | 0.79 | 1.00 | 0.98 | 0.94 | 0.97 | ||
| 0.5 | Accuracy | 1.00 | 1.00 | 0.84 | 0.85 | 1.00 | 0.89 | 0.92 | 0.92 | |
| Precision | 1.00 | 1.00 | 0.84 | 0.85 | 1.00 | 0.90 | 0.92 | 0.93 | ||
| Recall | 1.00 | 1.00 | 0.84 | 0.85 | 1.00 | 0.89 | 0.92 | 0.92 | ||
| F1 Score | 1.00 | 1.00 | 0.84 | 0.85 | 1.00 | 0.87 | 0.92 | 0.92 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saavedra-Ruiz, A.; Resto-Irizarry, P.J. A Portable UV-LED/RGB Sensor for Real-Time Bacteriological Water Quality Monitoring Using ML-Based MPN Estimation. Biosensors 2025, 15, 284. https://doi.org/10.3390/bios15050284
Saavedra-Ruiz A, Resto-Irizarry PJ. A Portable UV-LED/RGB Sensor for Real-Time Bacteriological Water Quality Monitoring Using ML-Based MPN Estimation. Biosensors. 2025; 15(5):284. https://doi.org/10.3390/bios15050284
Chicago/Turabian StyleSaavedra-Ruiz, Andrés, and Pedro J. Resto-Irizarry. 2025. "A Portable UV-LED/RGB Sensor for Real-Time Bacteriological Water Quality Monitoring Using ML-Based MPN Estimation" Biosensors 15, no. 5: 284. https://doi.org/10.3390/bios15050284
APA StyleSaavedra-Ruiz, A., & Resto-Irizarry, P. J. (2025). A Portable UV-LED/RGB Sensor for Real-Time Bacteriological Water Quality Monitoring Using ML-Based MPN Estimation. Biosensors, 15(5), 284. https://doi.org/10.3390/bios15050284