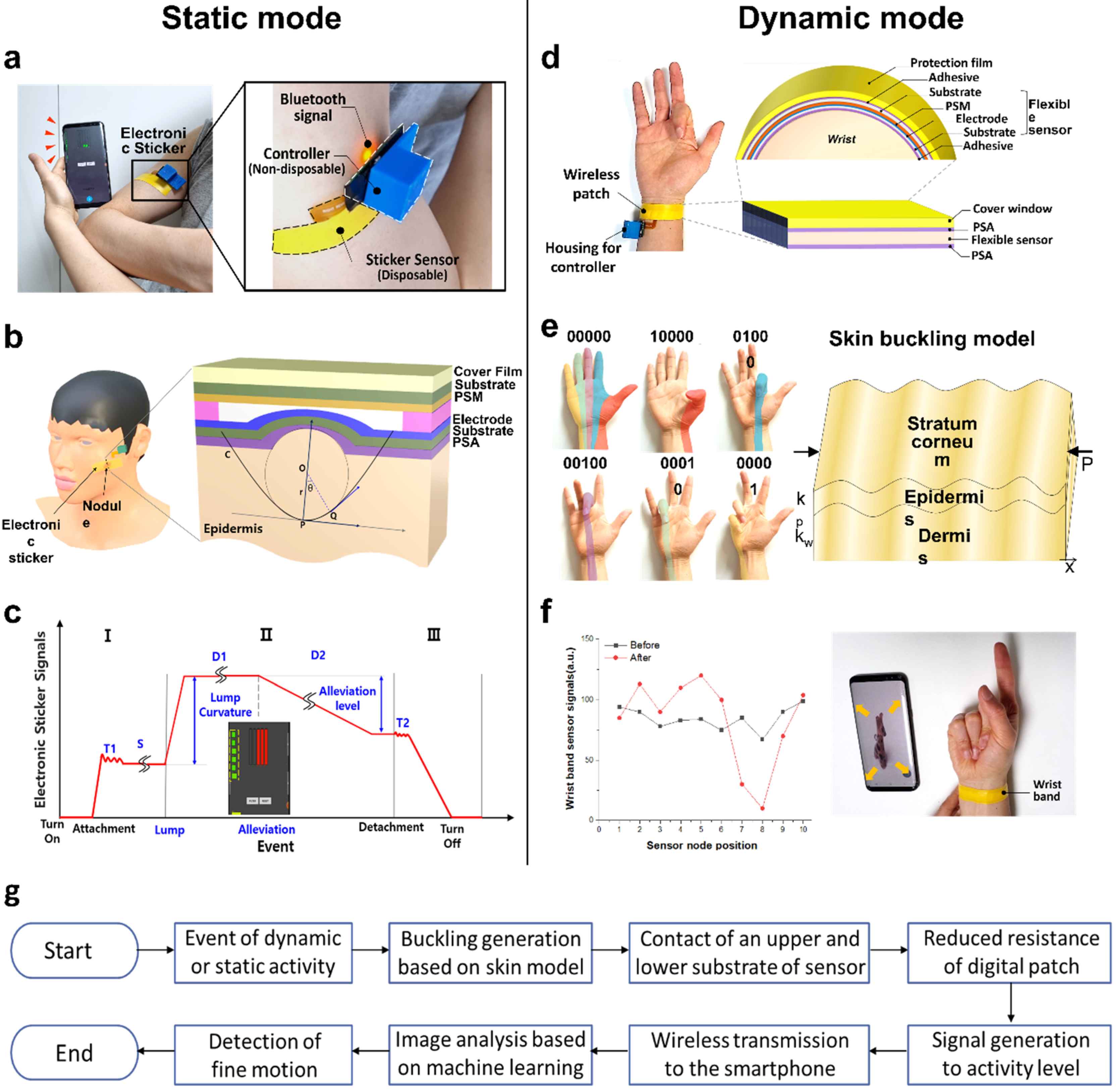
When the digital patch is attached to the nodule in static mode, as shown in
Figure 1b, the sensor causes geometric deformation near the nodule, leading to contact between the upper and lower plates. The resistance change occurs according to the contact area by the degree of deformation of the sensor. The curvature is calculated as the reciprocal of the r, radius of the osculating circle, which is in contact with the curve,
C, and the final curvature,
κ, is obtained as Equation (1). See the
Supplementary Equations (S1)–(S8) for detailed procedures.
Since the curvature represents the degree of bending, a circle with a large radius has a slight curvature, and a circle with a small radius has a large curvature.
To measure the wrist wrinkle patterns, it is necessary to evaluate them from a micromechanical point of view.
Figure 1e shows that the hand and wrist are anatomically connected [
28,
29]. When a finger is bent, force is transferred to the wrist due to the bone, tendon, and muscle structure connecting the wrist and hand. When separate fingers bend, different locations of the wrist epidermis deform. Therefore, the multi-layered skin wrinkle formation mechanism is interpreted through the mechanical calculation of linear buckling; we used the Equation applied to the buckling model proposed by the Timoshenko beam to find the amount of deformation [
30]. To simplify to the lower order, if we set the value to ignore the higher-order term and changed it to the second-order differential equation, Equation (2) is obtained. See
Supplementary Equations (S9)–(S14) for detailed procedures.
Here,
kp,
kw,
,
,
, and
denote the shear constant of foundation, spring constant, shear correction factor, shear stiffness, flexural rigidity, and deflection, respectively. The left graph of
Figure 1f displays a variation of the analog to digital converter (ADC) signal at the digital patch node before and after bending the finger. Node 1 is positioned on the far left, while the node on the right is 10. See
Supplementary Figure S3 for the operation flow of the digital patch. Additionally, depending on the specific gesture, the photo’s zoom in and out are implemented, as shown in
Figure 1f on the right side. The image is enlarged by an odd number of motions and reduced by an even number. Besides smartphones, all electronic devices linked to the electronic sticker can be integrated and controlled with only one input solution. Additionally, the sensing methodology diagram of the proposed digital patch is described as shown in
Figure 1g.
2.1. Characteristic Analysis of Sticker Sensor Signal Changes in Epidermis Curvature
We experimented by first attaching the sticker sensor to objects of known curvature to characterize the performance of the sticker sensor. The curvature was calculated by attaching a sensor to five cylindrical objects of 53, 65, 82, 90, and 100 mm diameter, as shown in
Figure 2a. As shown at the bottom of
Figure 2a, the ADC signal is generated according to the resistance change at each node of the sticker sensor. The graph length inside the yellow dashed line refers to the signal strength, and it is proportional to the ADC value. Additionally, the numbers 1 to 6 on the left of each figure are the numbering labels that correspond to the six sensor nodes in sequence. It can be seen that a more robust signal tends to be generated from objects of smaller diameter. The signal intensity distribution for the nodes according to each object is shown in
Figure 2b. Since the shapes are cylindrical, constant signal intensity should theoretically be produced at all nodes, but due to deviation between nodes, a relatively high value occurs at Node 5 compared to Node 1. Furthermore, the signal value according to the curvature is analyzed, taking the ADC average of each object, as shown in
Figure 2c. The sensor signal increases linearly with the curvature by R
2 = 0.960. The sensor was sensitive enough to detect the curvature of 0.00014 mm
−1, i.e., a change of 185 μm in the radius of the skin nodule. Here, the error bar indicates the standard error of the mean.
Since the digital patch is an ultra-thin sensor, it is also a device suitable for human body measurement where severe changes in curvature exist. We measured the curvature and radius of curvature by attaching sensors to the neck, hands, and feet among various human body parts. The upper row of
Figure 2d is a picture of the sticker sensor attached to the neck, hands, and foot, and the lower row is the respective sensor signal intensity value extracted. In each left figure of the upper row, the black dashed ellipse represents the area relatively protruded by the bone. In each center figure, only the disposable sticker sensor part is attached. Each rightmost figure has a sensor and housing attached. A lightweight 3D-printed housing made from polylactic acid (PLA) is used for user convenience. It is possible to increase usability in wearable applications by attaching only the sticker part in a normal state. The yellow dashed line in the lower row of
Figure 2d is the ADC signal value for each node received by the smartphone.
Before measuring the skin curvature, a correction process is required for each node.
Figure 2e is the extracted correction value based on the ADC value obtained in
Figure 2b,c from a cylindrical object with known curvature information. A constant value should be generated for the cylinder at all positions because it has the same curvature. However, it is uneven due to noise components and node deviations. The numerous causes for this include the difference in the thickness of PSA and film application due to the deviation of screen printing, which is a process issue, the sagging of the top substrate according to the position of the film, and the non-uniformity of the nanoparticles in the polymer, which is a material issue. We optimized the abnormal signal strength by multiplying it by the calibration factor. The calibration is based on the overall average value. For example, in the case of Node 5, since the generated value was higher than the overall average, the calibration factor is applied as 0.80. For Node 2, the signal intensity was lower than the average, so a high correction factor of 1.49 was applied to cancel the deviation and noise. In other words, it is corrected by multiplying the inversely proportional factor value of the generated signal value. Additionally, we can take the baseline with the software process at the initial stage.
The ADC values graph for each node measured at the neck, hands, and feet using the appropriate calibration factor is shown in
Figure 2f. Black dashed ellipses indicate the peak points for each body part. For the neck, the maximum value position is Node 4. The hand has a peak at Node 5, and the foot has a maximum value at Node 2. As shown in
Figure 2d, the position at the protruding part of the human body and the point of the peak signal coincides. It can be seen that the hand’s protruding bone shows the most significant curvature value of 0.0468 mm
−1. The next largest curvatures are those of the neck, followed by the foot. The ADC also increases in Node1; the periphery is bent on a steep slope for the foot. We empirically derived an Equation,
κ = (S
I + C
1)/C
2, from the regression equation of
Figure 2c. Here,
κ and S
I represent the curvature and signal intensity, and constants C
1 and C
2 are 82.6 and 6927.6, respectively. Based on this Equation, the curvature and the radius of curvature can be calculated through the ADC values for each body part. At Node 5 of the neck, the ADC signal of the patch was 184.7, and the curvature was calculated as 0.0385 mm
−1. The curvature at the protrusions of the hand and foot was estimated as 0.0468 mm
−1 and 0.0246 mm
−1, respectively.
2.2. Binary Signal Analysis According to Finger Gesture Combinations
The wrist patch is composed of ten nodes. When the right-hand palm faces upward, the node close to the little finger is set to Node 1, and the node close to the thumb is defined as Node 10. When the thumb is bent, maximum negative deformation occurs at Node 9, as shown in
Figure 3a. Here, negative deformation means that the skin is dented downward. The skin associated with position Node 8 is also weakly indented. In response, the skin becomes convex at Nodes 7 and 10, which are in the periphery of Nodes 8 and 9, which causes a positive deformation. When the index finger is folded, maximum deformation occurs in Node 8, and valleys up to 7 and 9 are formed in the aftermath. In addition, as a reaction to this, the epidermis has a convex shape at Nodes 6 and 10, which increases the sensor signal. When the middle finger is folded, the maximum deformation occurs at Node 6, and the sensor signal changes in the negative direction up to Nodes 5 and 4.
Because fingers are structurally connected by bones, muscles, and tendons, bending one finger can have a mechanical effect on the other fingers. Moreover, when the ring finger is folded, an epidermis valley is formed at Nodes 4 and 6, centering on Node 5. A protrusion of the skin occurs at the Node 3 and 5 positions, which are in the periphery, which increases the signal. For the little finger, peaks occur mainly at Nodes 3 and 4. However, since the overall signal change amount is relatively small and the little finger folds weakly along with the ring finger, there is uncertainty for extracting only the little finger’s signal.
We investigated the tendency of the sensor signal according to finger binary when two or more fingers were folded, based on the skin deformation equation. Finger binary is a system for counting and displaying binary numbers on the fingers. In the finger binary mode, 1 and 0 indicate the finger’s folded and unfolded state, respectively. So, the binary code ‘00000′ with all fingers spread out is the default condition with no signal change. There are ten cases in which two fingers are folded, as shown in the upper part of
Figure 3b. For example, the case where the thumb and index fingers are folded is expressed as 11000. We displayed the core line for each case on the epidermis deformation map based on −40 or less, and it was confirmed that the core point was different for each of the ten cases. The left is the original image’s color, and the right is segmented by vector quantization so that the core line can be judged intuitively. The K-means clustering algorithm determined that image analysis is easiest when the clustering number is six, as shown in
Supplementary Figure S1a.
Interestingly, groups like 11000, 10100, 10010, and 10001, where the thumb is folded, have a deep, negative joint deformation at Node 9. The thumb’s folding effect is reflected in multi-folding, as shown in
Figure 3a. Furthermore, when the middle finger, ring finger, and little finger are folded in order, respectively, the core line is gradually moved to the left. We also confirmed that the trend in sensor signal change, according to each folding of the middle, ring, and little finger in
Figure 3a, was accurately projected. Furthermore, the same rule applies to ‘01100’, ‘01010’, and ‘01001’, Since the index finger is folded, a deep core line is formed at Node 8, and when the middle, ring, and little finger are, respectively, folded simultaneously with the index finger, the core line moves to the left as well. In other words, it can be seen that even when multiple fingers are folded, the pattern of signal change for individual fingers is obtained. In addition, in binary cases such as ‘01001’ and ‘00101’, the finger’s bending posture is not natural, so there are cases where three fingers are folded instead of two. Furthermore, the signal is mixed in some cases, but overall, the linear sum of individual fingers is reflected in the map. Therefore, it can be concluded that ten binaries can be distinguished for two-finger folding since each case has its own unique signal identity. When three fingers were folded, the signal change according to the skin deformation solution was investigated.
We judged that the optimized clustering number is five for three-finger folding, as seen in the
Supplementary Figure S1b. As shown at the bottom of
Figure 3b, ten cases of finger binaries reflect folds in three fingers. Likewise, the lower-left is original, and the lower-right figure is a vector quantized image. The three-finger fold also had a similar signal trend, as did the two-finger fold. Even when folding three fingers, gestures such as ‘01101’ and ‘10101’ are uncomfortable and can cause four fingers to bend instead of three. However, since the ten cases in which the three fingers are folded also have their own signal identity, it can be confirmed that each case can be distinguished by using the location of the core line. When the thumb is included with a bent finger, the core line is distributed at Node 9, and if the index finger is included, the core line is generally distributed at Node 8.
We further analyzed the signal distribution when four or five fingers were bent. As shown in
Figure 3c, the total number of cases where four fingers can be bent is five, and the number of cases where the five fingers can be bent is in the form of a fist. For ‘11101’, five fingers are bent unnaturally instead of four fingers. However, this situation shows a signal trend distinct from ‘11111’ due to the difference in the bent finger level. In the case of bending four or five fingers, it is easy to see through the distribution that negative deformation occurs in a wide area due to bending many fingers at once. A plurality of core lines is generated. In addition, unlike the previous situations, there are some cases with the same core line. In the case of ‘11110’, ‘11101’, ‘11011’, and ‘11111’, core lines are formed at the same Nodes (4, 5, and 8). However, in each case, positions can be distinguished through the depth of the associated core line. In the case of ‘11101’, there was a deep concavity on average of 107 at Node 5 compared with ‘11110’, ‘11011’, and ‘11111’; and for ‘11110’, the concavity was lower than 50 at Node 4 than at ‘11011’ and ‘11111’. Finally, ‘11011’ can be distinguished because it is 70 or higher than ‘11111’ at Node 5. Even if the core point is in the exact location, there is a difference in the degree of depth. In short, through the core line’s position and depth, it is possible to decipher 32-finger binaries, including the case of all unfolded fingers with no signal change. Unnatural gestures can be eliminated for advanced accuracy, and forms of motion contrary to social norms can be removed and used.
The total signal change in the negative direction at each sensor node when each finger is individually folded is presented in
Figure 3d. In the thumb, the maximum change can be mainly seen at Node 9. Regarding other fingers, the maximum change occurs at Node 8 for the index finger, Node 6 for the middle finger, Node 5 for the ring finger, and Node 3 for the little finger. The level of epidermis deformation varies depending on the number of fingers folded. The more fingers that are folded, the greater the degree of skin deformation, and the amount of change in the sensor signal accelerates in the negative direction. The total sum of pure negative deformation, excluding positive deformation, is shown in the graph of
Figure 3e. The degree of deformation when folding four fingers changes by approximately 3.49 times compared with folding one finger. It can be seen that the changed signal value decreases linearly by R
2 = 0.967 up to four fingers folded, depending on the number of folded fingers. However, the signal value increases when five fingers are folded compared with four fingers due to mutual interference. Based on the results presented,
Figure 3a,f,g can be understood. In the case of ‘00111’, the multi-folding graph is indicated by a solid red line, and a solid black line denotes the sum of signals of individual folding of the middle, ring, and little finger. In the case of ‘00111’ of
Figure 3f, when the analysis is focused on the negative deformation, which means the core line, even during multi-folding, it can be seen that skin deformation occurs in the vicinity of the peak Nodes 5 and 6 of the middle and ring fingers. In other words, a multi-folding graph can be constructed through a linear sum of individual folding finger signals.
On the other hand, in the case of ‘01101’ of
Figure 3g, it can be seen that the maximum difference between individual linear sums and multi-folding at the same position is more than 125, as shown in the solid blue square box. It is shown that fingers bent in an uncomfortable posture have different signals from the binary gesture and are not expressed as the sum of individual finger signals. In multi-finger folding, skin deformation of a different shape occurs when the same finger is bent. Finally, among the 32 cases, it was confirmed that the finger binaries were distinguished from each other using a unique signal identity according to the position and depth of the core line.
2.4. Time Series Analysis after the Patch Attachment Using Deep Learning
After accurately detecting the epidermis’s dynamic and static state, attaching the sticker sensor to the skin takes time to stabilize. This is because the resistance increases after attaching the sensor so that the sensor signal decreases for a certain period. We used a multi-layer perceptron called a feedforward deep-neural network to predict the sensor noise component through the mean absolute error (MAE). The epoch, optimizer, and batch size variables that minimize the algorithm verification index MAE were analyzed. Here, MAE is defined as Equation (7),
y is the actual output value, and
is the predicted output value.
We first obtained the optimal values for epoch, optimizer, and batch size factor. After the sensor was attached, the signal change trend was recorded for 1 min, and out of 31 data trends obtained at 2 s intervals, 26 were classified as a training set, and the others were used as a test set.
Figure 4a is a graph of MAE according to the epoch. For learning 200 times, it was confirmed that the MAE was minimal in both training and test sets. We took the reciprocal of MAE to check the dramatic difference between the functions. The smallest MAE was shown in the test set when taking the Adaptive Gradient (AdaGrad) function in the optimizer case, as shown in
Figure 4b. Here, the AdaGrad function is a technology that gradually reduces the learning rate effectively. A similar trend was demonstrated in the loss function. Training and test sets showed different patterns for the batch size, but since the test area’s value is essential, we took the size 64, which is the minimum test MAE, as shown in
Figure 4c.
Finally, we extracted the predicted value over time, as shown in
Figure 4d, and we obtained a small value of 0.0969 while keeping MAE in the test area.
The accuracy of the system can be further improved by supplementing additional items. Conformal attachment of the exact skin location is critical for precision through a sticker sensor. Since the skin surface condition, including Young’s modulus, is different for each person, sensor performance can be improved through customized calibration for an individual. Furthermore, even with the same gesture, every person has differences in finger bending level and speed, affecting signal intensity. Therefore, it may be necessary to calibrate this device using customized initial data.
There is general unease about receiving face-to-face treatment in the pandemic era due to the potential spread of germs through contact between patients. This device has the advantage of using a disposable contact point sensor to prevent the spread of germs between patients due to repeated use. Additionally, since the digital patch takes the form factor of a detachable electronic sticker, anyone can quickly use this technology. So, it is anticipated that it will become an essential device, even in aging societies. Furthermore, it is expected to be advantageous for portable applications that require ultra-lightweight and ultra-thin sensor characteristics.







{kind=link}
{kind=link}
{kind=link}
{kind=link}