An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | # Fingers | # Motors | Weight (g) | DoF | Trans. |
|---|---|---|---|---|---|
| HandSOME [13] | 2 | 0 | - | 1 | Springs/links |
| HANDEXOS [14] | 1 | 1 | 115 | 5 | Steel wire ropes |
| Gloreha [15] | 5 | - | - | - | Steel wire ropes |
| Wege et al. [16] | 5 | 5 | - | 20 | Steel wire ropes |
| Ueki et al. [17] | 5 | 11 | - | 18 | Links |
| Rehabotics [18] | 5 | - | - | - | Steel wire ropes |
| Hand of Hope [19] | 5 | - | - | - | Links |
| In et al. [20] | 0 | 0 | 80 | 1 | Steel wire ropes |
| Tadano et al. [21] | 5 | - | - | 10 | Pneumatics |
| DiCicco et al. [22] | 2 | - | - | 2 | Pneumatics |
| KULEX [23] | 2 | 1 | - | 1 | Links |
| Nycz et al. [12] | 4 | 4 | 113 | 4 | Sliding springs |
| Yurkewich et al. [24] | 5 | 2 | - | - | Fishing wire tendons |
| Gasser et al. [25] | 5 | 1 | 360 | 1 | Wire |
| Li et al. [26] | 5 | 6 | 500 | 6 | Links |
| Ahmed et al. [27] | 5 | 14 | 280 | 14 | Links |
| Zhang et al. [28] | 3 | 1 | 352 | 4 | Tendon-actuated |
| Ours | 5 | 5 | 1040 * | 5 | Sliding springs |
3. Hand Exoskeleton for Bilateral Hand Training
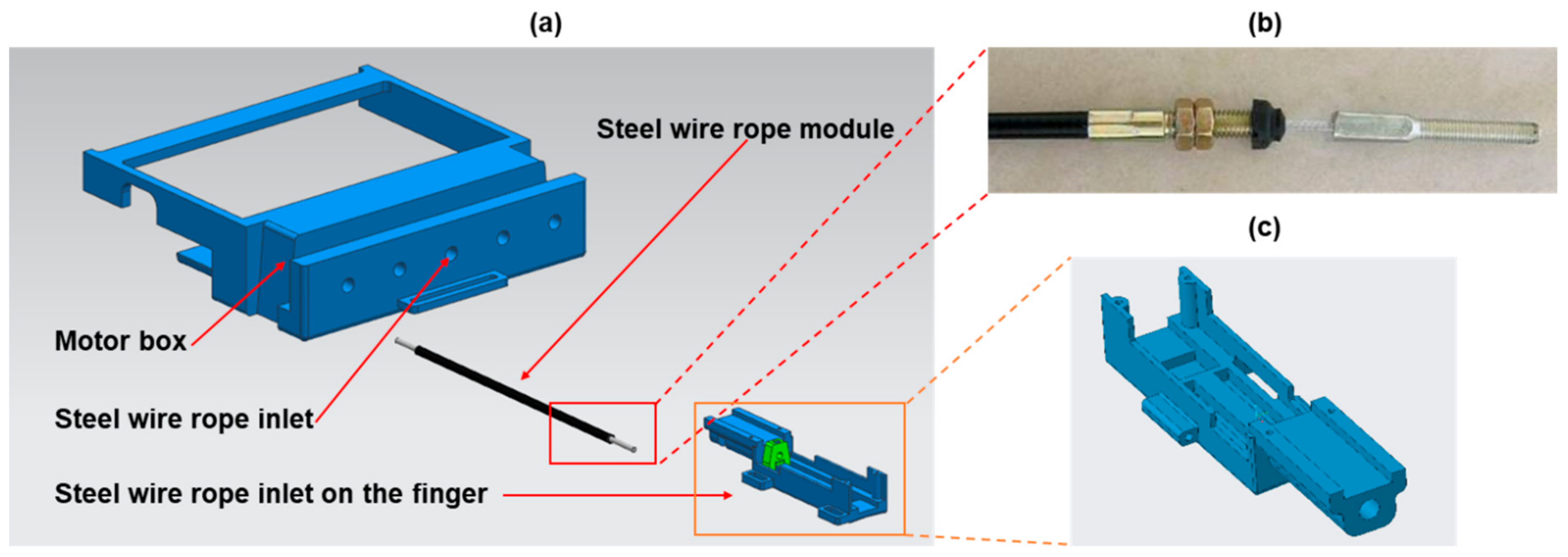
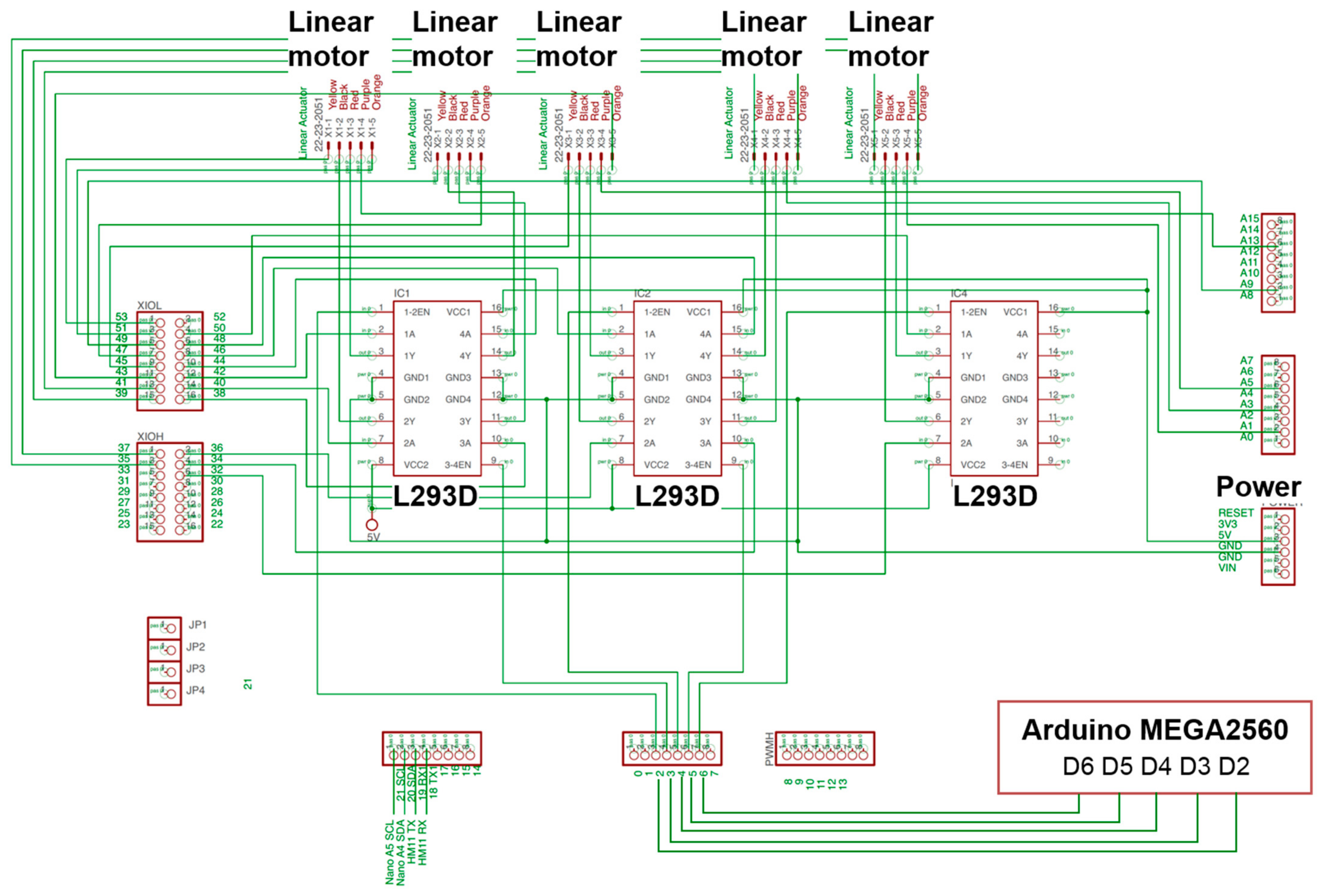
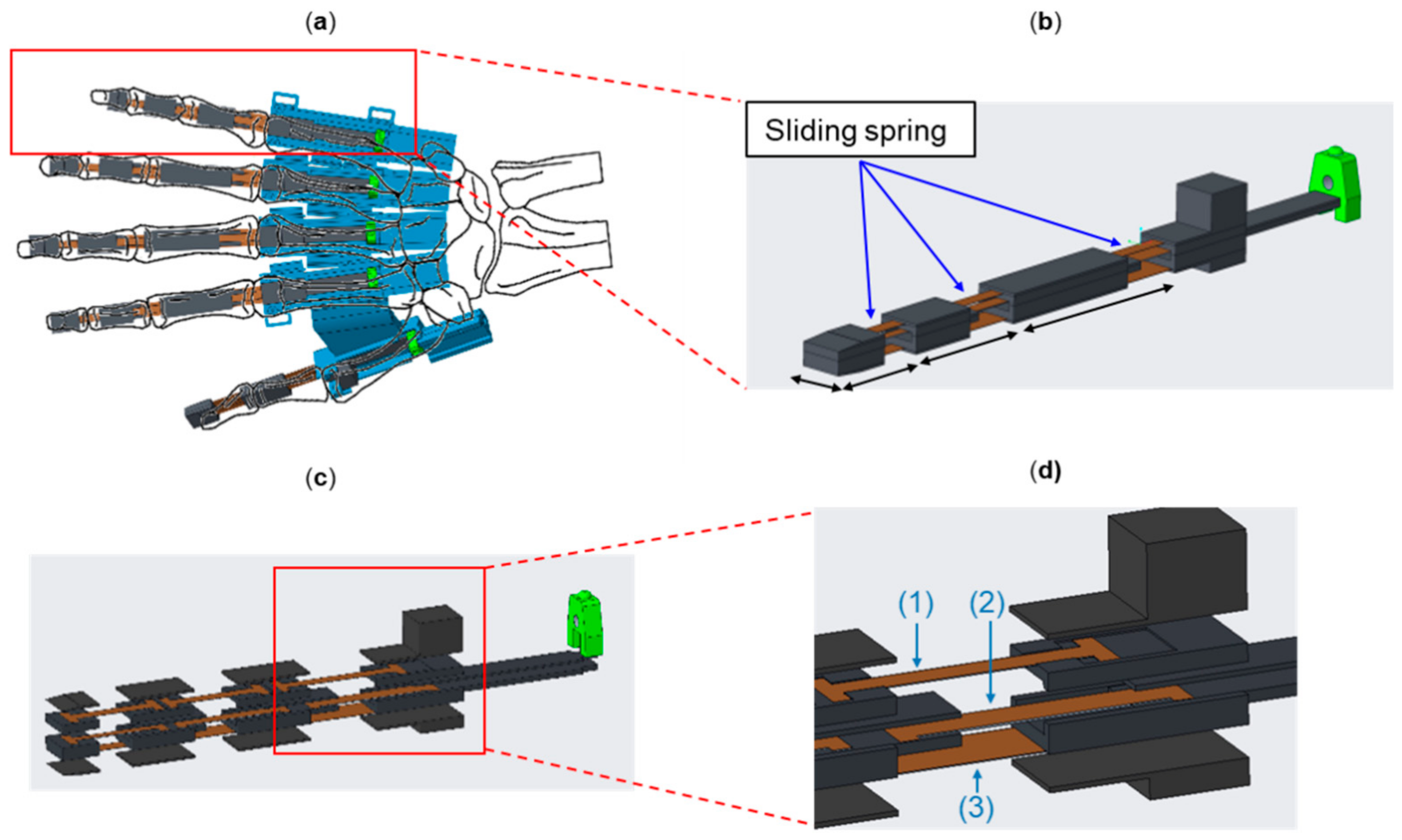
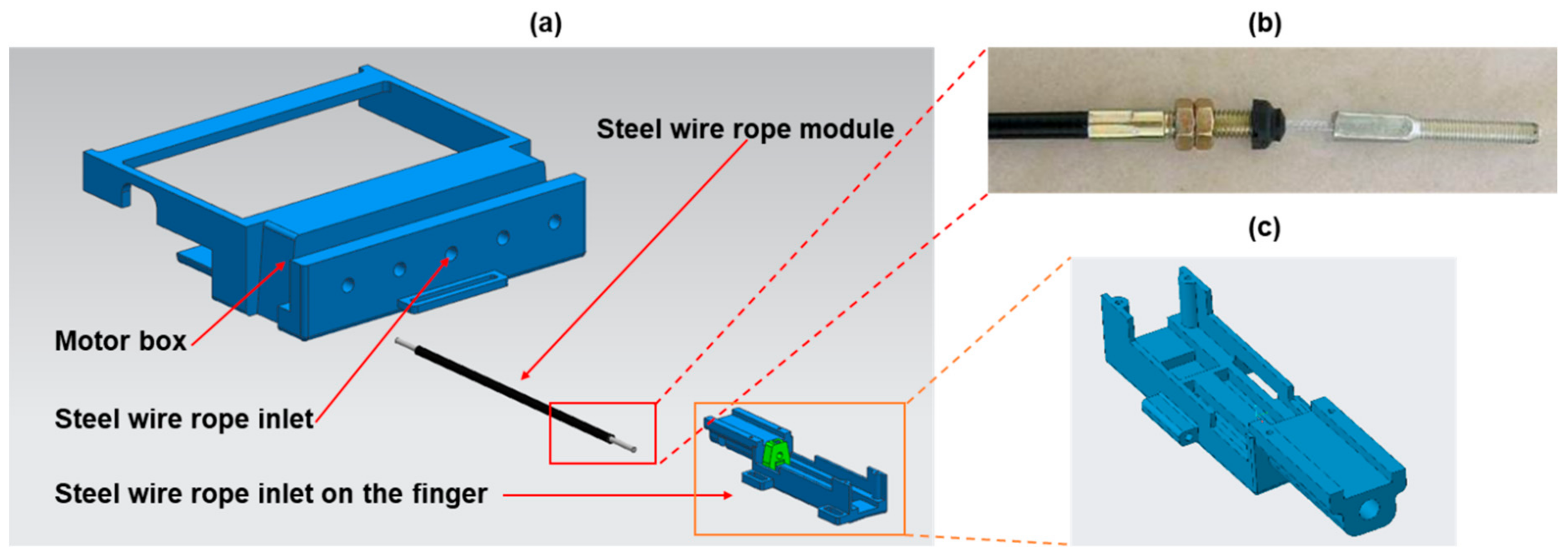
3.1. Design of Hand Exoskeleton
3.2. Design of Thumb Mechanism
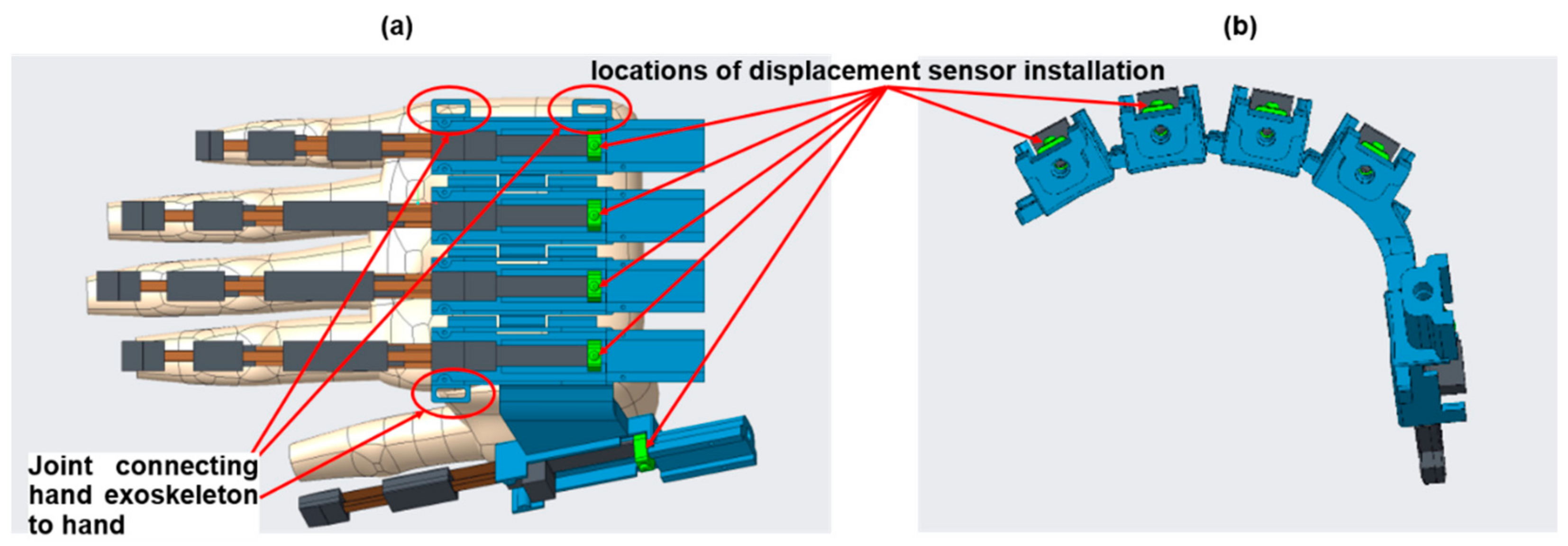
3.3. Accurate Measurement of Displacement of the Sliding Spring
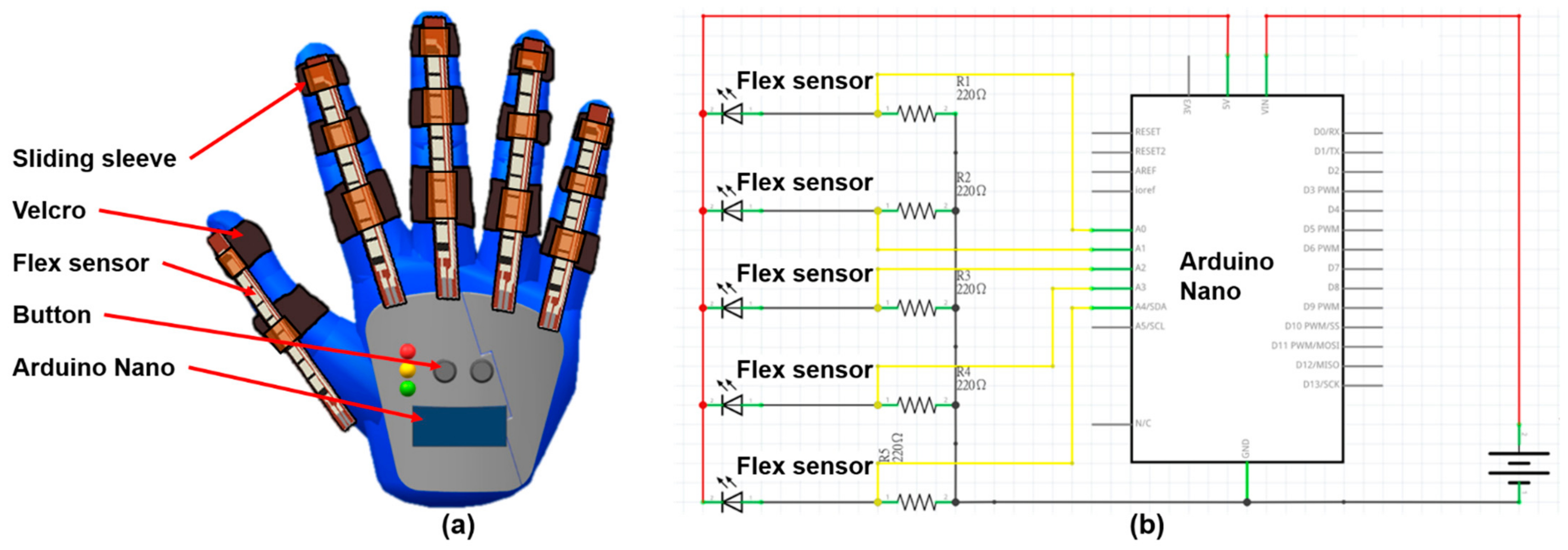
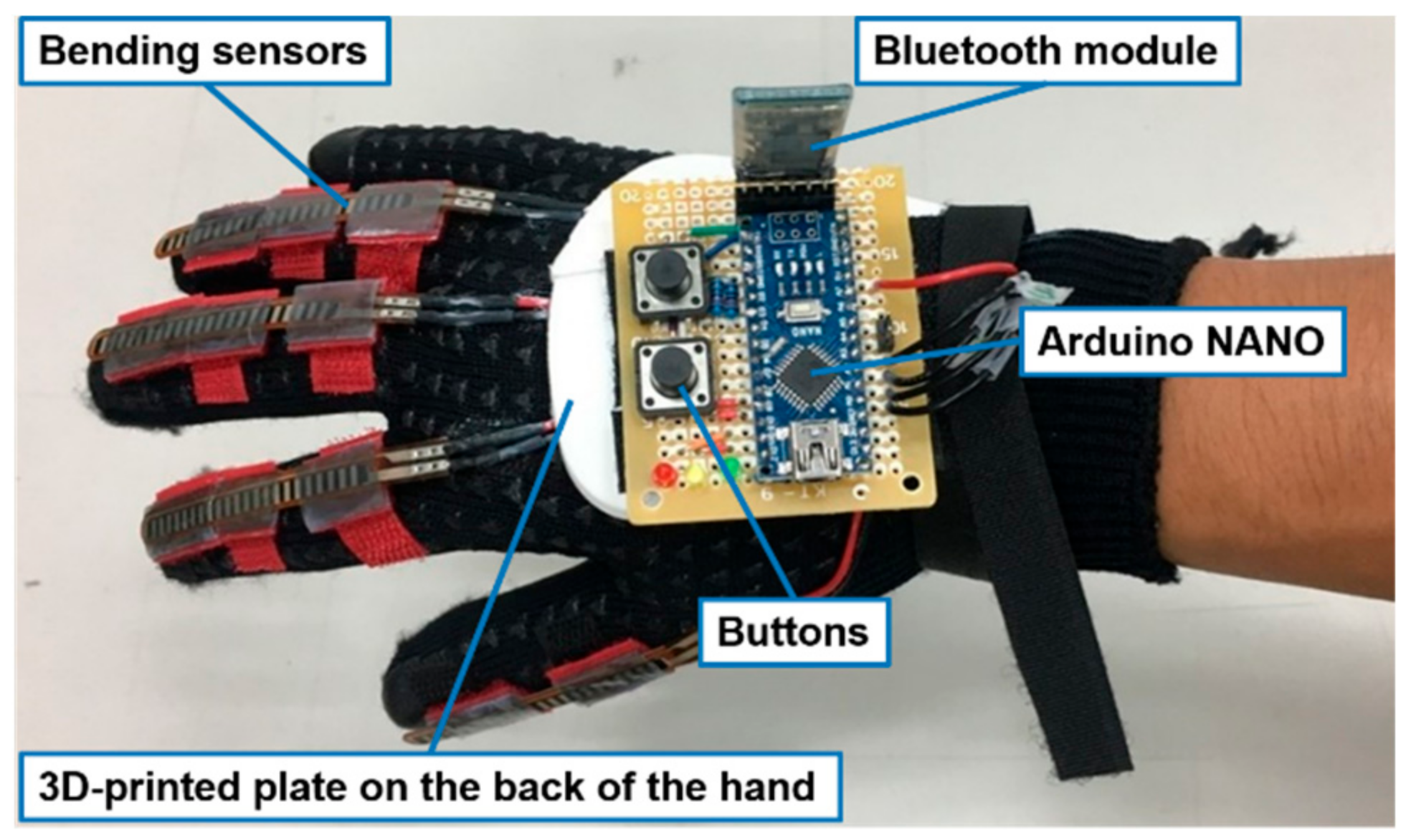
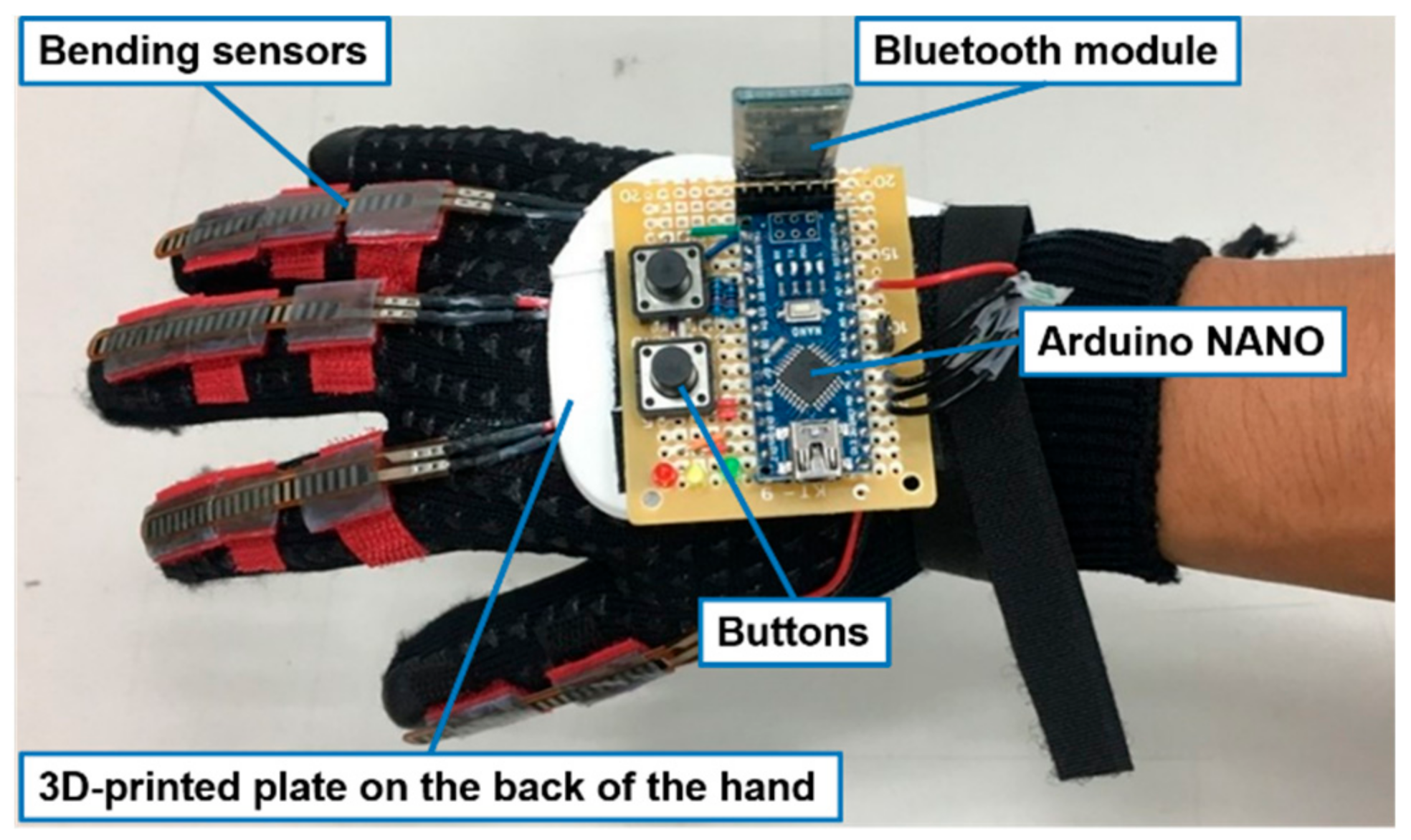
3.4. Design of the Hand-Sensing Glove
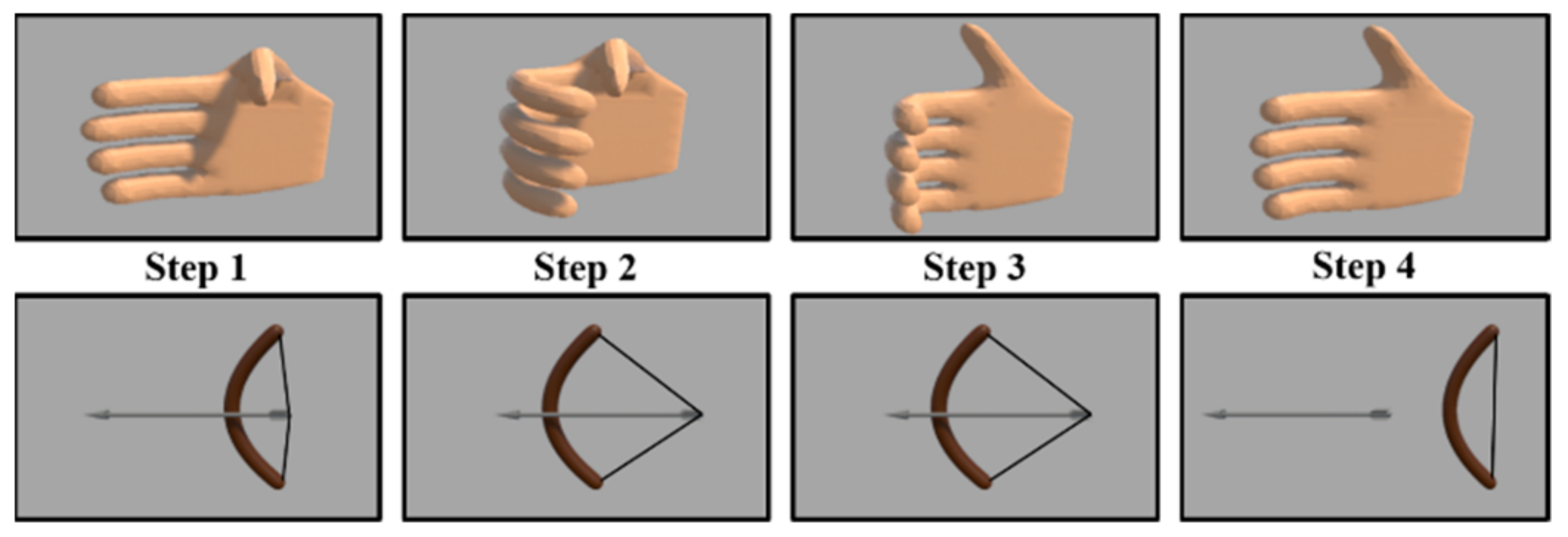
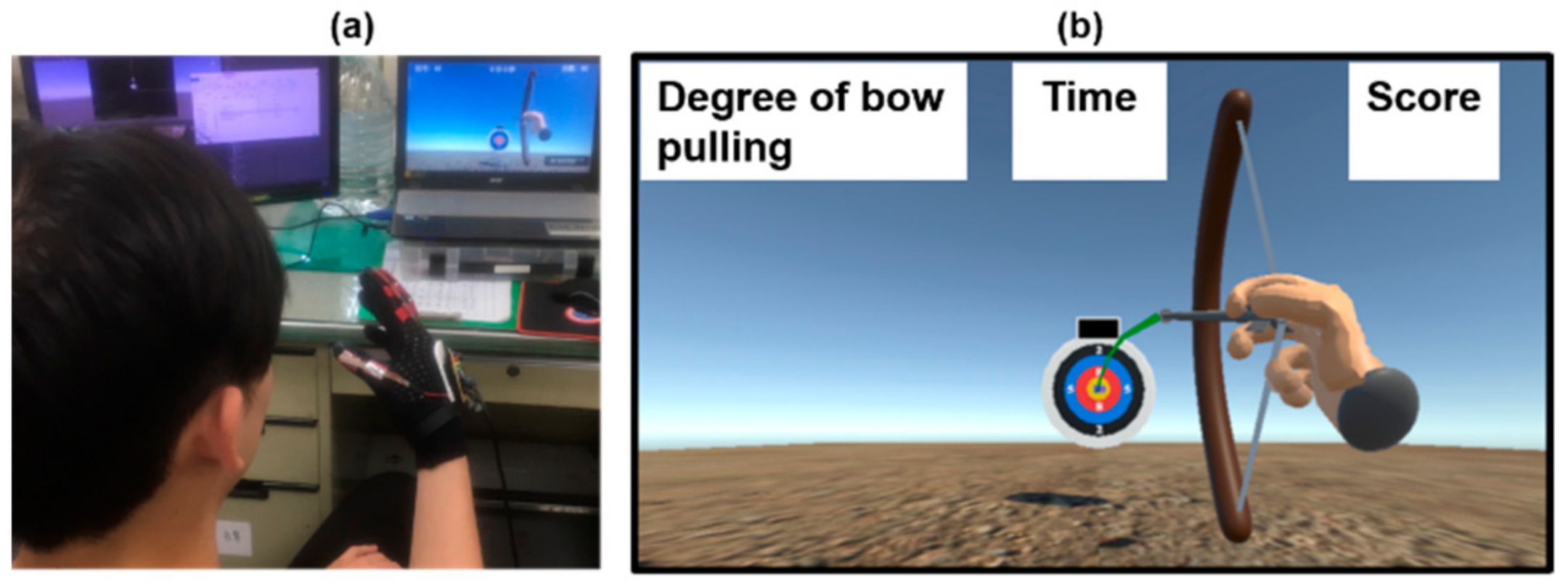
3.5. Virtual Reality Game
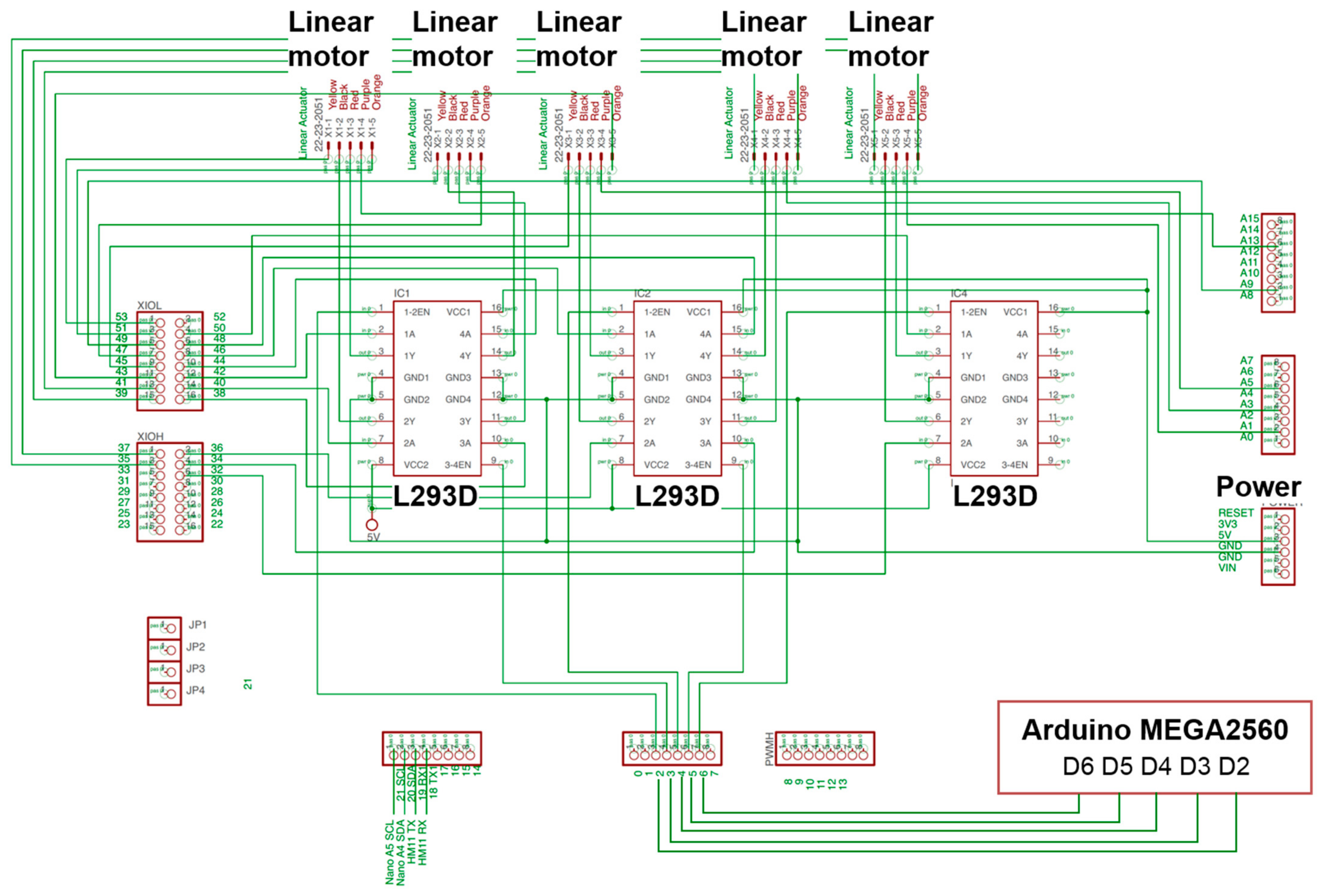
4. Implementation
4.1. Hand-Sensing Glove
4.2. Virtual Archery Game
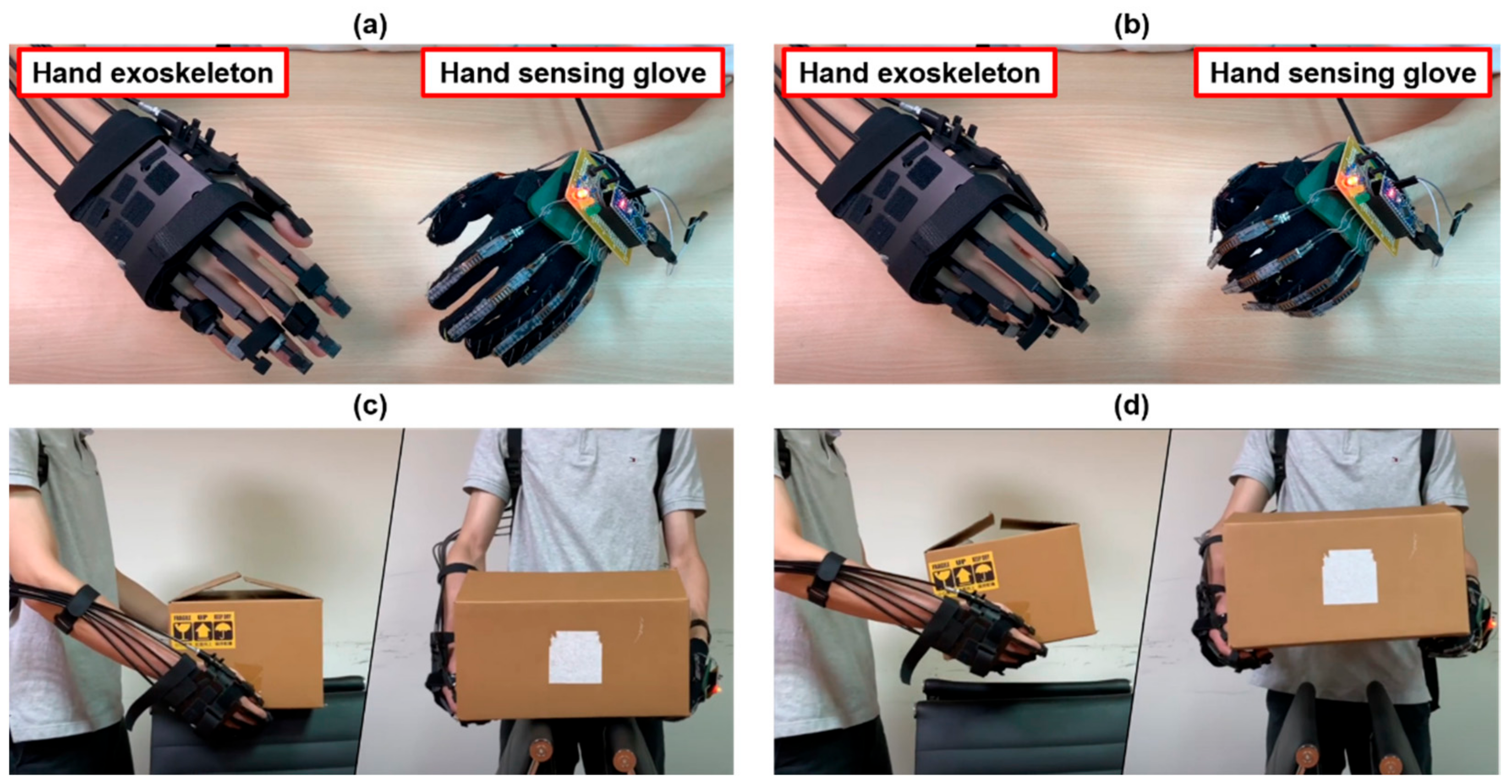
4.3. Bilateral Hand Training
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hakkennes, S.; Keating, J.L. Constraint-induced movement therapy following stroke: A systematic review of randomised controlled trials. Aust. J. Physiother. 2005, 51, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Niemi, M.-L.; Laaksonen, R.; Kotila, M.; Waltimo, O. Quality of life 4 years after stroke. Stroke 1988, 19, 1101–1107. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kelly-Hayes, M.; Beiser, A.; Kase, C.S.; Scaramucci, A.; D’Agostino, R.B.; Wolf, P.A. The influence of gender and age on disability following ischemic stroke: The Framingham study. J. Stroke Cerebrovasc. Dis. 2003, 12, 119–126. [Google Scholar] [CrossRef]
- Camak, D.J. Addressing the burden of stroke caregivers: A literature review. J. Clin. Nurs. 2015, 24, 2376–2382. [Google Scholar] [CrossRef]
- Kubler, A.; Mushahwar, V.; Hochberg, L.R.; Donoghue, J.P. BCI meeting 2005-workshop on clinical issues and applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 131. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.-M.; Kwong, P.W.; Lai, C.K.; Ng, S.S. Comparison of bilateral and unilateral upper limb training in people with stroke: A systematic review and meta-analysis. PLoS ONE 2019, 14, e0216357. [Google Scholar] [CrossRef] [Green Version]
- Stoykov, M.E.; Lewis, G.N.; Corcos, D.M. Comparison of bilateral and unilateral training for upper extremity hemiparesis in stroke. Neurorehabil. Neural Repair 2009, 23, 945–953. [Google Scholar] [CrossRef]
- Whitall, J.; Waller, S.M.; Sorkin, J.D.; Forrester, L.W.; Macko, R.F.; Hanley, D.F.; Goldberg, A.P.; Luft, A. Bilateral and unilateral arm training improve motor function through differing neuroplastic mechanisms: A single-blinded randomized controlled trial. Neurorehabil. Neural Repair 2011, 25, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Lang, C.E.; MacDonald, J.R.; Reisman, D.S.; Boyd, L.; Kimberley, T.J.; Schindler-Ivens, S.M.; Hornby, T.G.; Ross, S.A.; Scheets, P.L. Observation of amounts of movement practice provided during stroke rehabilitation. Arch. Phys. Med. Rehabil. 2009, 90, 1692–1698. [Google Scholar] [CrossRef] [Green Version]
- Heo, P.; Gu, G.M.; Lee, S.-j.; Rhee, K.; Kim, J. Current hand exoskeleton technologies for rehabilitation and assistive engineering. Int. J. Precis. Eng. Manuf. 2012, 13, 807–824. [Google Scholar] [CrossRef]
- In, H.; Cho, K.-J. Compact hand exoskeleton robot for the disabled. In Proceedings of the 6th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Gwangju, Korea, 29–31 October 2009; pp. 29–31. [Google Scholar]
- Nycz, C.J.; Bützer, T.; Lambercy, O.; Arata, J.; Fischer, G.S.; Gassert, R. Design and characterization of a lightweight and fully portable remote actuation system for use with a hand exoskeleton. IEEE Robot. Autom. Lett. 2016, 1, 976–983. [Google Scholar] [CrossRef]
- Brokaw, E.B.; Black, I.; Holley, R.J.; Lum, P.S. Hand Spring Operated Movement Enhancer (HandSOME): A portable, passive hand exoskeleton for stroke rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 391–399. [Google Scholar] [CrossRef]
- Chiri, A.; Vitiello, N.; Giovacchini, F.; Roccella, S.; Vecchi, F.; Carrozza, M.C. Mechatronic design and characterization of the index finger module of a hand exoskeleton for post-stroke rehabilitation. IEEE/ASmE Trans. Mechatron. 2011, 17, 884–894. [Google Scholar] [CrossRef]
- Borboni, A.; Mor, M.; Faglia, R. Gloreha—Hand robotic rehabilitation: Design, mechanical model, and experiments. J. Dyn. Syst. Meas. Control 2016, 138, 111003. [Google Scholar] [CrossRef]
- Wege, A.; Zimmermann, A. Electromyography sensor based control for a hand exoskeleton. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007; pp. 1470–1475. [Google Scholar]
- Ueki, S.; Kawasaki, H.; Ito, S.; Nishimoto, Y.; Abe, M.; Aoki, T.; Ishigure, Y.; Ojika, T.; Mouri, T. Development of a hand-assist robot with multi-degrees-of-freedom for rehabilitation therapy. IEEE/ASME Trans. Mechatron. 2010, 17, 136–146. [Google Scholar] [CrossRef]
- Pu, S.-W.; Cheng, L.-W.; Chang, J.-Y. A robot-assisted hand exoskeletal system for mirror therapy rehabilitation. In Information Storage and Processing Systems; American Society of Mechanical Engineers: New York, NY, USA, 2017; p. V001T007A003. [Google Scholar]
- Ho, N.; Tong, K.; Hu, X.; Fung, K.; Wei, X.; Rong, W.; Susanto, E. An EMG-driven exoskeleton hand robotic training device on chronic stroke subjects: Task training system for stroke rehabilitation. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–5. [Google Scholar]
- In, H.; Lee, D.; Cho, K.-J. Investigation of friction characteristics of a tendon driven wearable robotic hand. In Proceedings of the ICCAS 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 568–573. [Google Scholar]
- Tadano, K.; Akai, M.; Kadota, K.; Kawashima, K. Development of grip amplified glove using bi-articular mechanism with pneumatic artificial rubber muscle. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2363–2368. [Google Scholar]
- DiCicco, M.; Lucas, L.; Matsuoka, Y. Comparison of control strategies for an EMG controlled orthotic exoskeleton for the hand. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1622–1627. [Google Scholar]
- Hong, M.B.; Kim, S.J.; Um, T.; Kim, K. KULEX: An ADL power-assistance demonstration. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 30 October–2 November 2013; pp. 542–544. [Google Scholar]
- Yurkewich, A.; Kozak, I.J.; Hebert, D.; Wang, R.H.; Mihailidis, A. Hand Extension Robot Orthosis (HERO) Grip Glove: Enabling independence amongst persons with severe hand impairments after stroke. J. Neuroeng. Rehabil. 2020, 17, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Gasser, B.W.; Martínez, A.; Sasso-Lance, E.; Kandilakis, C.; Durrough, C.M.; Goldfarb, M. Preliminary Assessment of a Hand and Arm Exoskeleton for Enabling Bimanual Tasks for Individuals With Hemiparesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2214–2223. [Google Scholar] [CrossRef]
- Li, K.; Li, Z.; Zeng, H.; Wei, N. Control of Newly-Designed Wearable Robotic Hand Exoskeleton Based on Surface Electromyographic Signals. Front. Neurorobot. 2021, 15, 711047. [Google Scholar] [CrossRef]
- Ahmed, T.; Assad-Uz-Zaman, M.; Islam, M.R.; Gottheardt, D.; McGonigle, E.; Brahmi, B.; Rahman, M.H. Flexohand: A Hybrid Exoskeleton-Based Novel Hand Rehabilitation Device. Micromachines 2021, 12, 1274. [Google Scholar] [CrossRef]
- Jeong, S.; Tran, P.; Desai, J.P. Integration of Self-Sealing Suction Cups on the FLEXotendon Glove-II Robotic Exoskeleton System. IEEE Robot. Autom. Lett. 2020, 5, 867–874. [Google Scholar] [CrossRef]
- Stammerjohn, L.W., Jr.; Smith, M.J.; Cohen, B.F. Evaluation of work station design factors in VDT operations. Hum. Factors 1981, 23, 401–412. [Google Scholar] [CrossRef] [PubMed]
- Sharples, S.; Cobb, S.; Moody, A.; Wilson, J.R. Virtual reality induced symptoms and effects (VRISE): Comparison of head mounted display (HMD), desktop and projection display systems. Displays 2008, 29, 58–69. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.-H.; Koh, C.-L.; Hsu, C.-H.; Chen, P.-C.; Chen, J.-W.; Lan, Y.-H.; Yang, Y.; Lin, Y.-D.; Wu, C.-H.; Liu, H.-K.; et al. An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation. Biosensors 2021, 11, 495. https://doi.org/10.3390/bios11120495
Yang S-H, Koh C-L, Hsu C-H, Chen P-C, Chen J-W, Lan Y-H, Yang Y, Lin Y-D, Wu C-H, Liu H-K, et al. An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation. Biosensors. 2021; 11(12):495. https://doi.org/10.3390/bios11120495
Chicago/Turabian StyleYang, Shih-Hung, Chia-Lin Koh, Chun-Hang Hsu, Po-Chuan Chen, Jia-Wei Chen, Yu-Hao Lan, Yi Yang, Yi-De Lin, Chun-Hung Wu, Hsien-Kuang Liu, and et al. 2021. "An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation" Biosensors 11, no. 12: 495. https://doi.org/10.3390/bios11120495
APA StyleYang, S.-H., Koh, C.-L., Hsu, C.-H., Chen, P.-C., Chen, J.-W., Lan, Y.-H., Yang, Y., Lin, Y.-D., Wu, C.-H., Liu, H.-K., Lo, Y.-C., Liu, G.-T., Kuo, C.-H., & Chen, Y.-Y. (2021). An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation. Biosensors, 11(12), 495. https://doi.org/10.3390/bios11120495