1. Introduction
In recent decades, with the advent of technological advancement, small-scale structures like nanoclock, nano-oscillator, nanosensor, NEMS (Nano-Electro-Mechanica System), and so forth have found tremendous attention due to their various applications. In this scenario, the study of dynamical behaviors of nanostructures is important and a need of the hour. Due to the small size of nanostructures, experimental analysis of such structures is always challenging and difficult as it requires enormous experimental efforts. Moreover, classical mechanics or continuum mechanics fail to address the nonlocal effect also. In this regard, nonlocal continuum theories were recently found to be useful for the modeling of micro- and nanosized structures. Various researchers developed different nonlocal or nonclassical continuum theories to assimilate the small-scale effect, such as strain gradient theory [
1], couple stress theory [
2], micropolar theory [
3], nonlocal elasticity theory [
4], and so on. Out of all these theories, nonlocal elasticity theory of Eringen has been broadly used for the dynamic analysis of nanostructures. Few studies regarding the vibration and buckling of beam, membrane, and nanostructures such as nanobeam, nanotube, nanoribbon, and so forth can be found in [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14].
Wang et al. [
15] studied buckling behavior of micro- and nanorods/tubes with the help of Timoshenko beam theory, where small-scale effect was addressed by using the nonlocal elasticity theory of Eringen. Emam [
16] incorporated nonlocal elasticity theory to analyze the buckling and the postbuckling response of nanobeams analytically. Yu et al. [
17] used nonlocal thermo-elasticity theory to study buckling behavior of Euler–Bernoulli nanobeam with nonuniform temperature distribution. Nejad et al. [
18] employed a generalized differential quadrature method to undertake the buckling analysis of the nanobeams made of two-directional functionally graded materials (FGM) using nonlocal elasticity theory. Dai et al. [
19] analytically studied the prebuckling and postbuckling behavior of nonlocal nanobeams subjected to the axial and longitudinal magnetic forces. Bakhshi Khaniki and Hosseini-Hashemi [
20] implemented nonlocal strain gradient theory to investigate the buckling behavior of Euler–Bernoulli beam, considering different types of cross-section variation using the generalized differential quadrature method. Yu et al. [
21] proposed a three characteristic-lengths-featured size-dependent gradient-beam model by incorporating the modified nonlocal theory and Euler–Bernoulli beam theory. He implemented the weighted residual approach to solve the six-order differential equation to investigate the buckling behaviors. Malikan [
22] used a refined beam theory to investigate the buckling behavior of SWCNT (Single Walled carbon NanoTube) using Navier’s method. Here, unidirectional load is applied on the SWCNT. Buckling analysis of FG (Fanctionally Graded) nanobeam was studied in [
23] analytically with the help of Navier’s method under the framework of first-order shear deformation beam theory. Malikan et al. investigated the transient response [
24] of nanotube for a simply supported boundary condition using Kelvin–Voigt viscoelasticity model with nonlocal strain gradient theory. An investigation regarding damped forced vibration of SWCNTs using a shear deformation beam theory subjected to viscoelastic foundation and thermal environment can be found in [
25]. Some other notable studies can be seen in [
26,
27,
28,
29,
30]
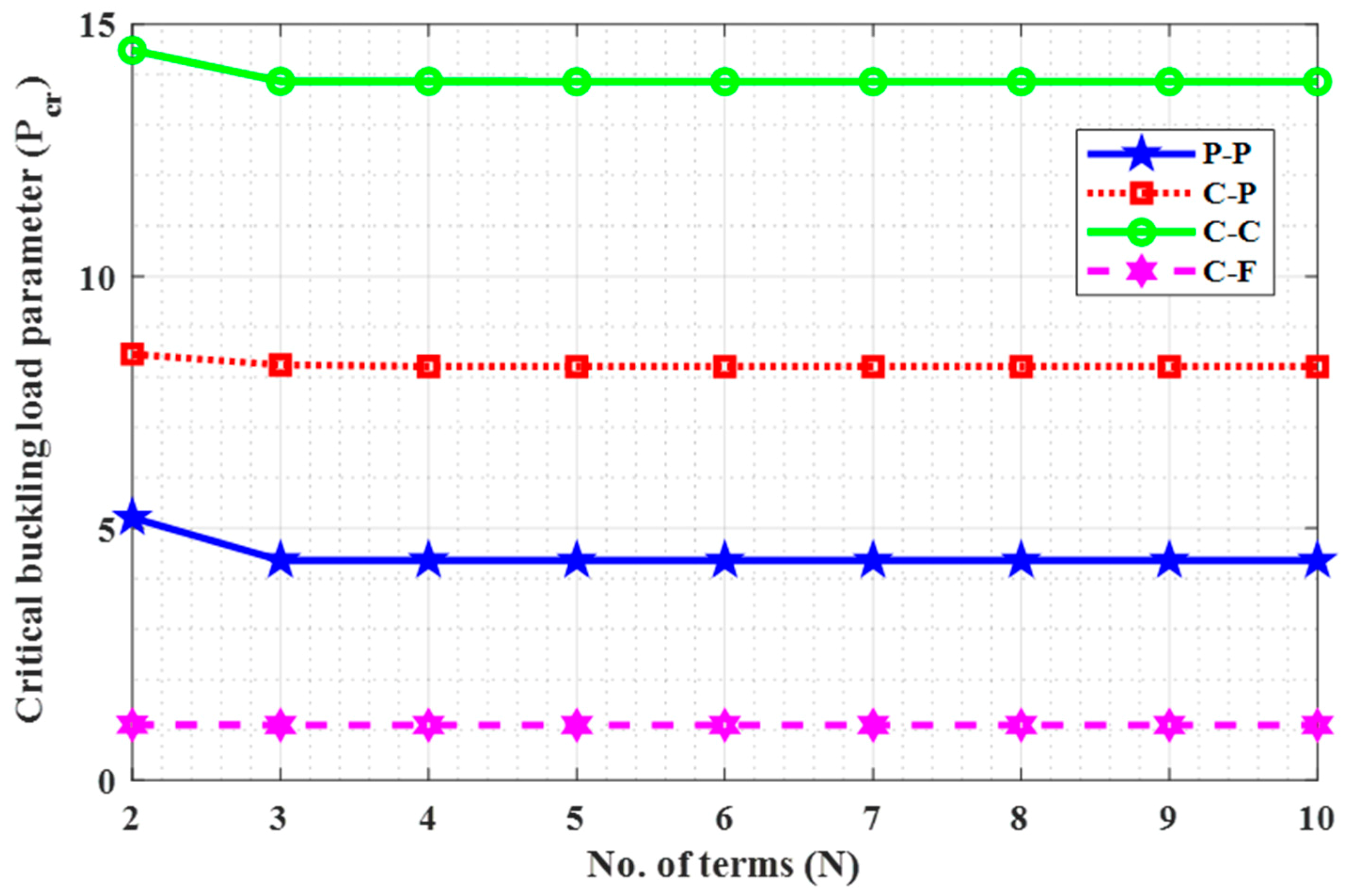
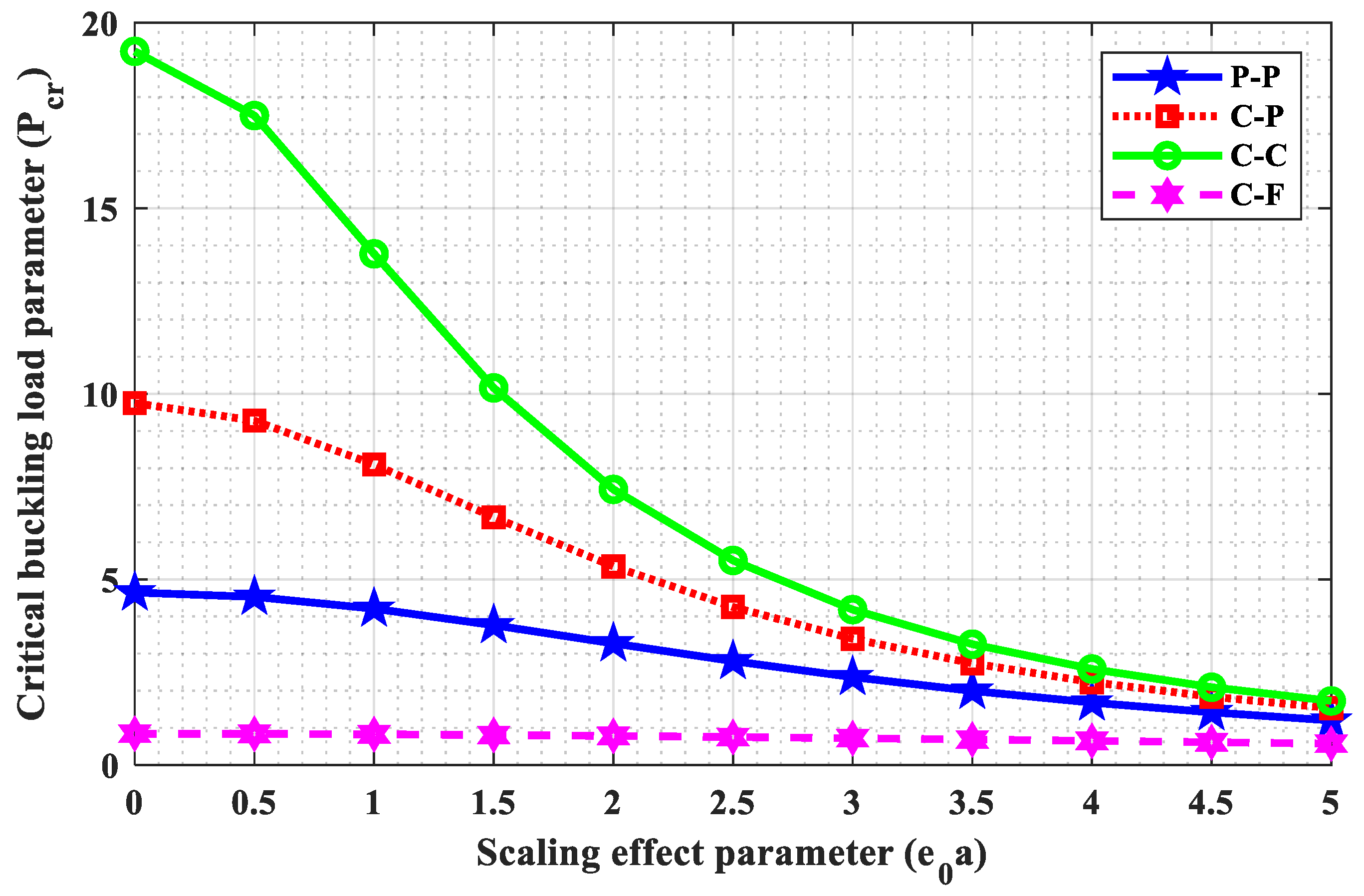
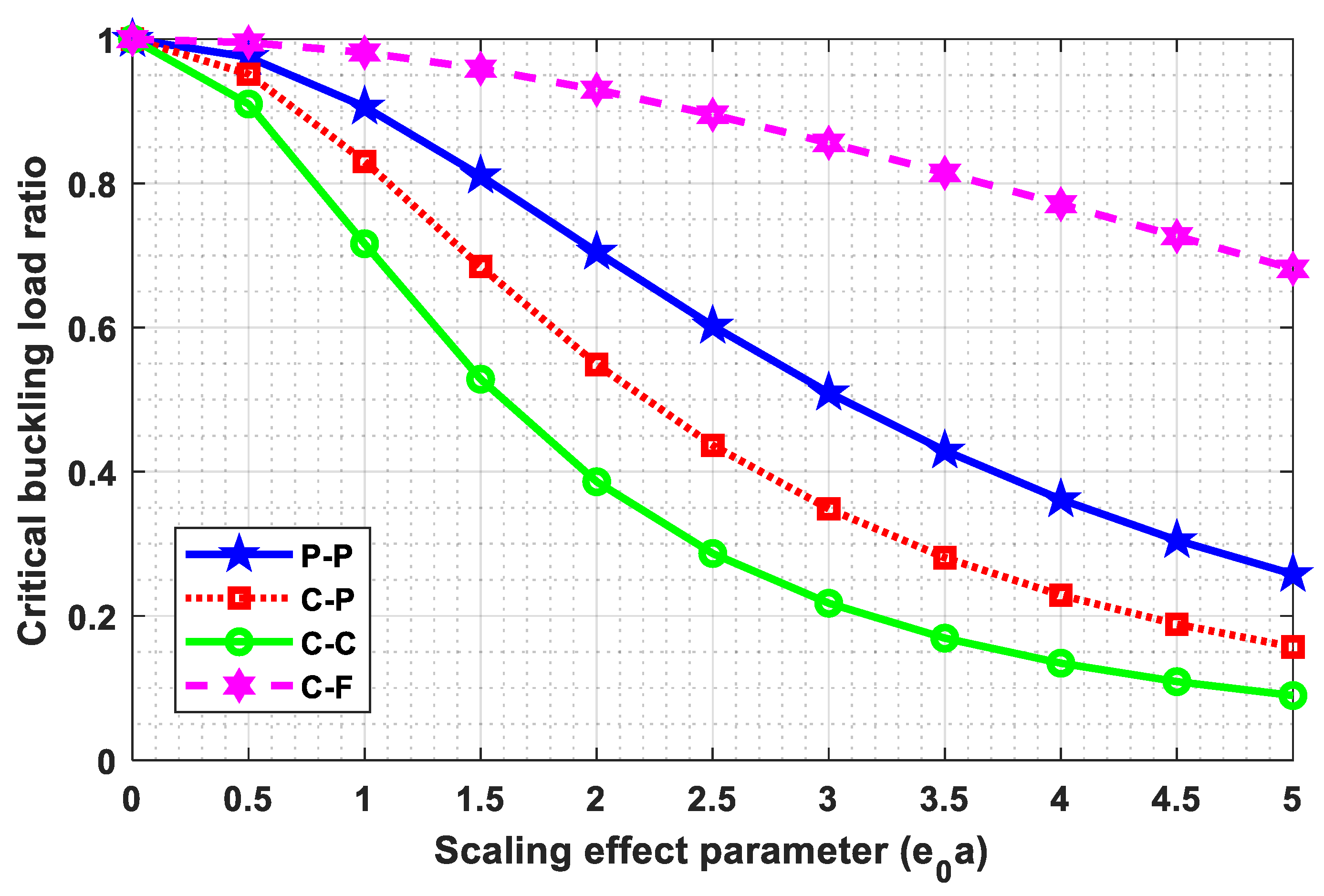
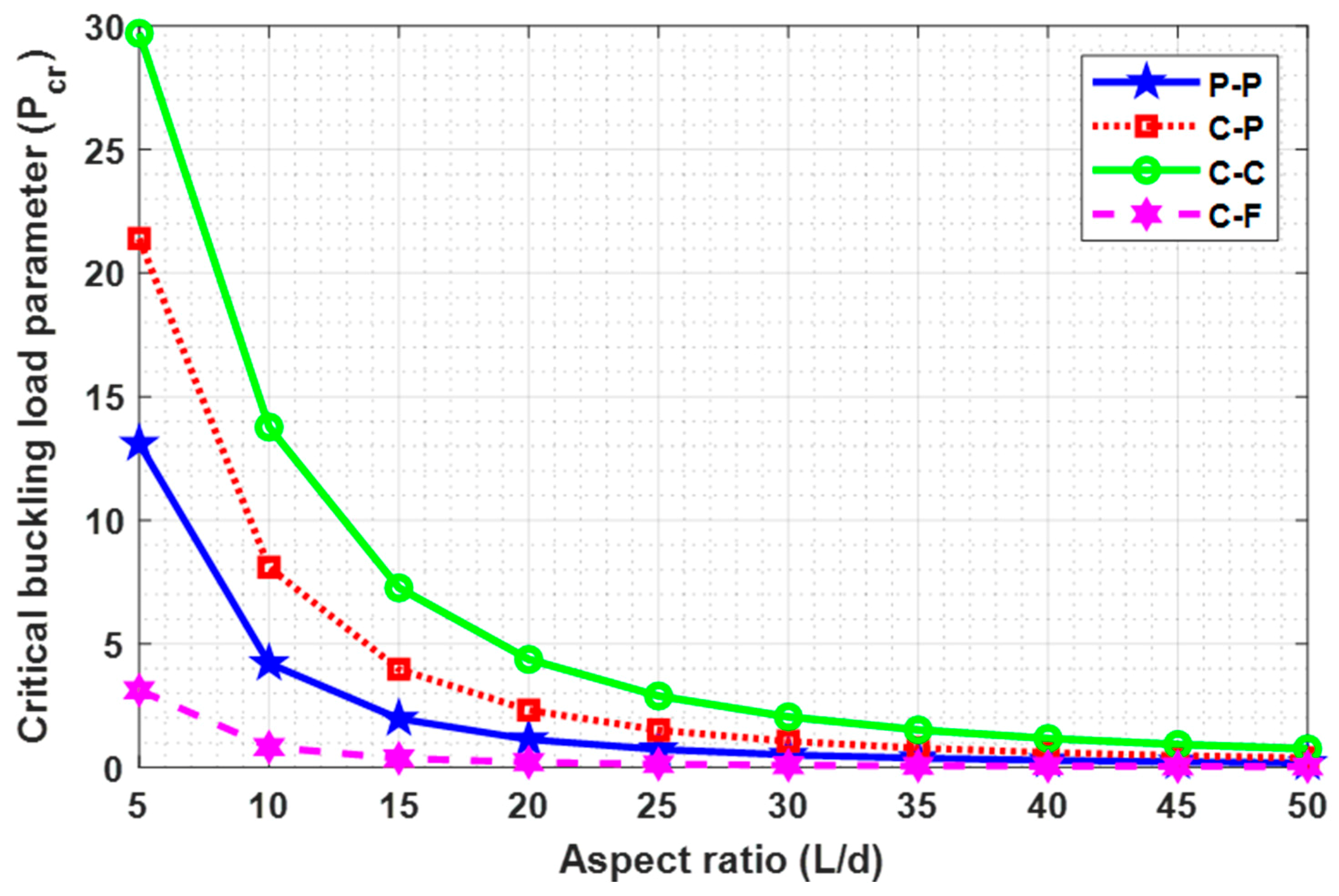
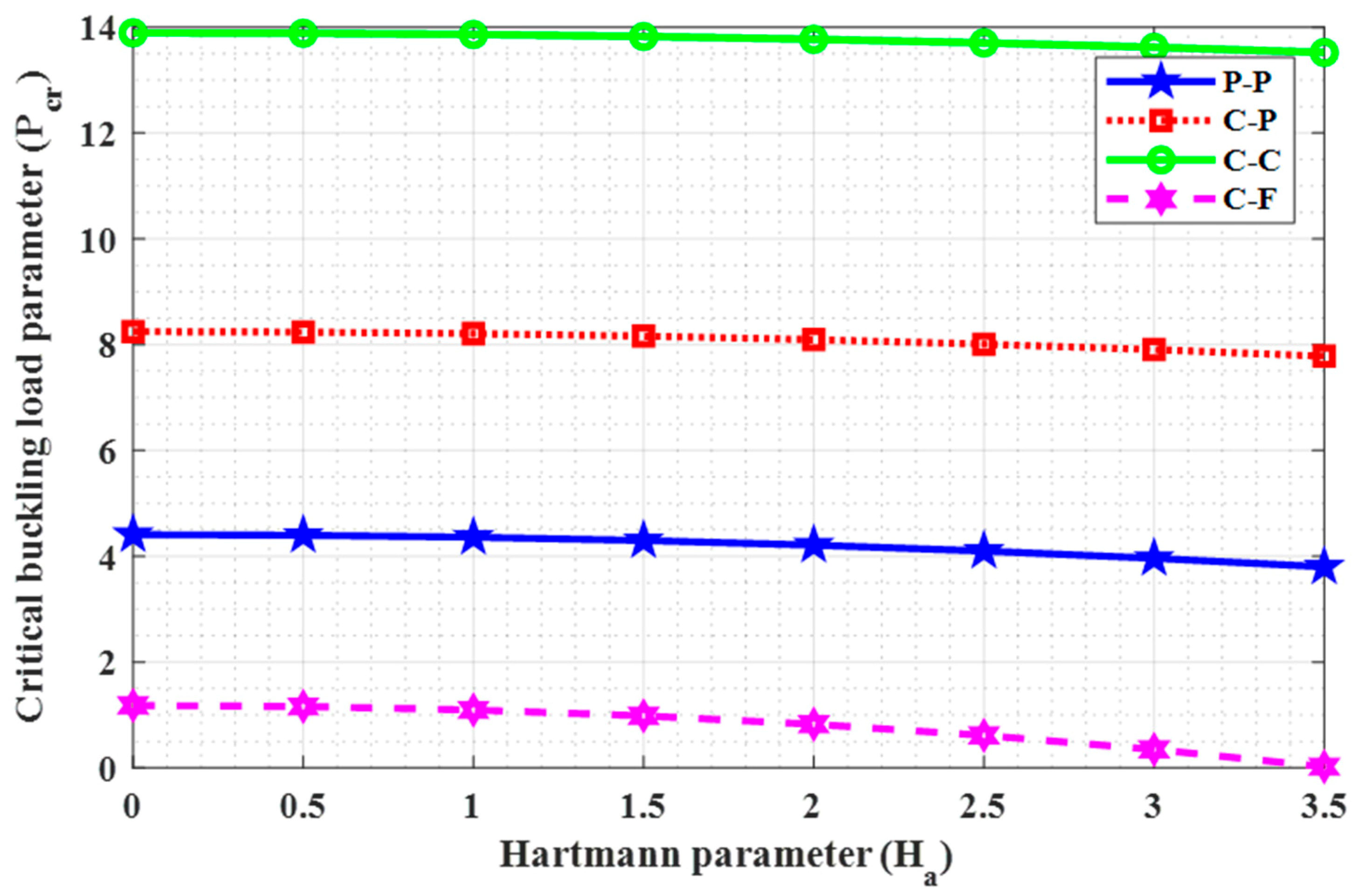
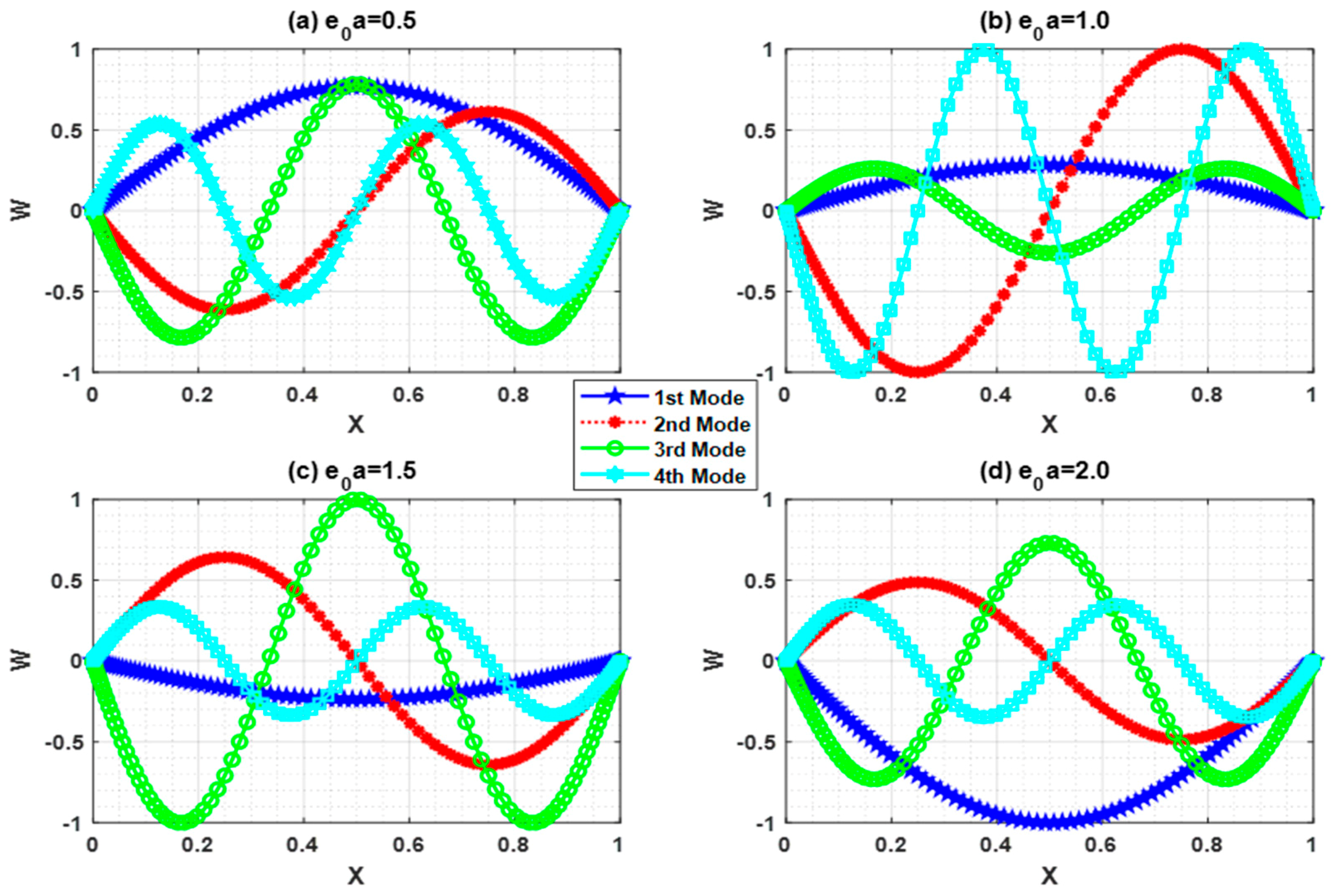
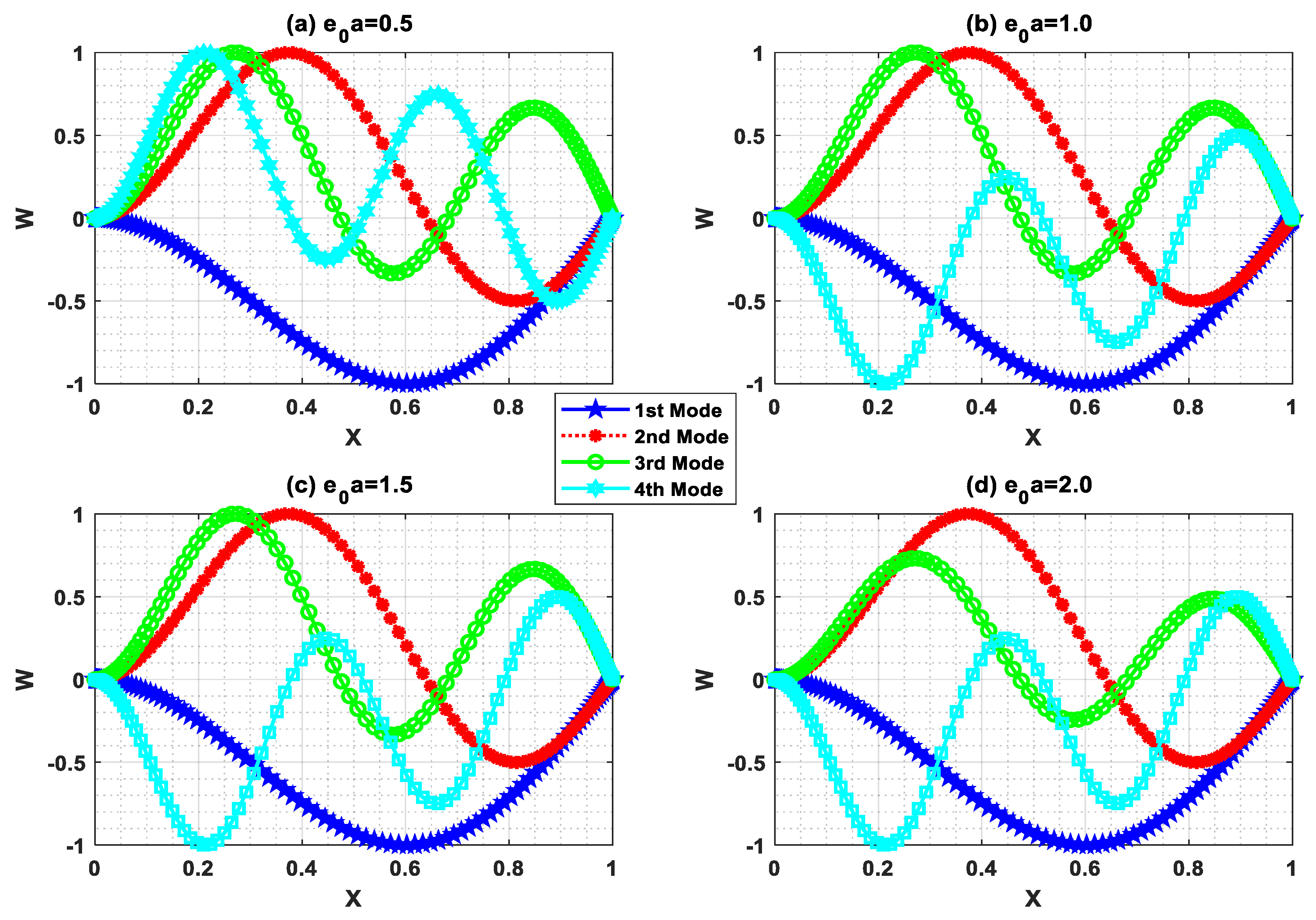
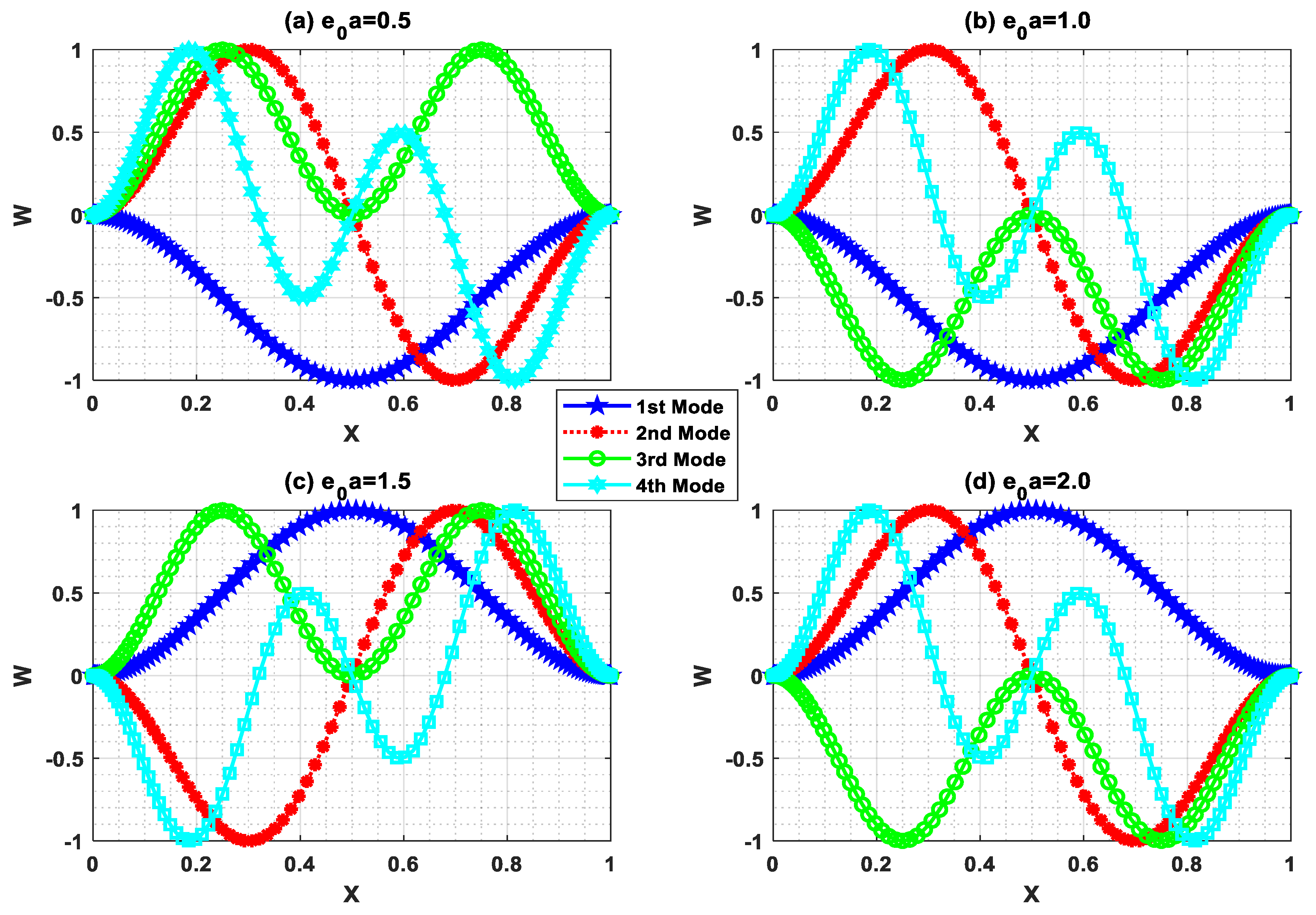
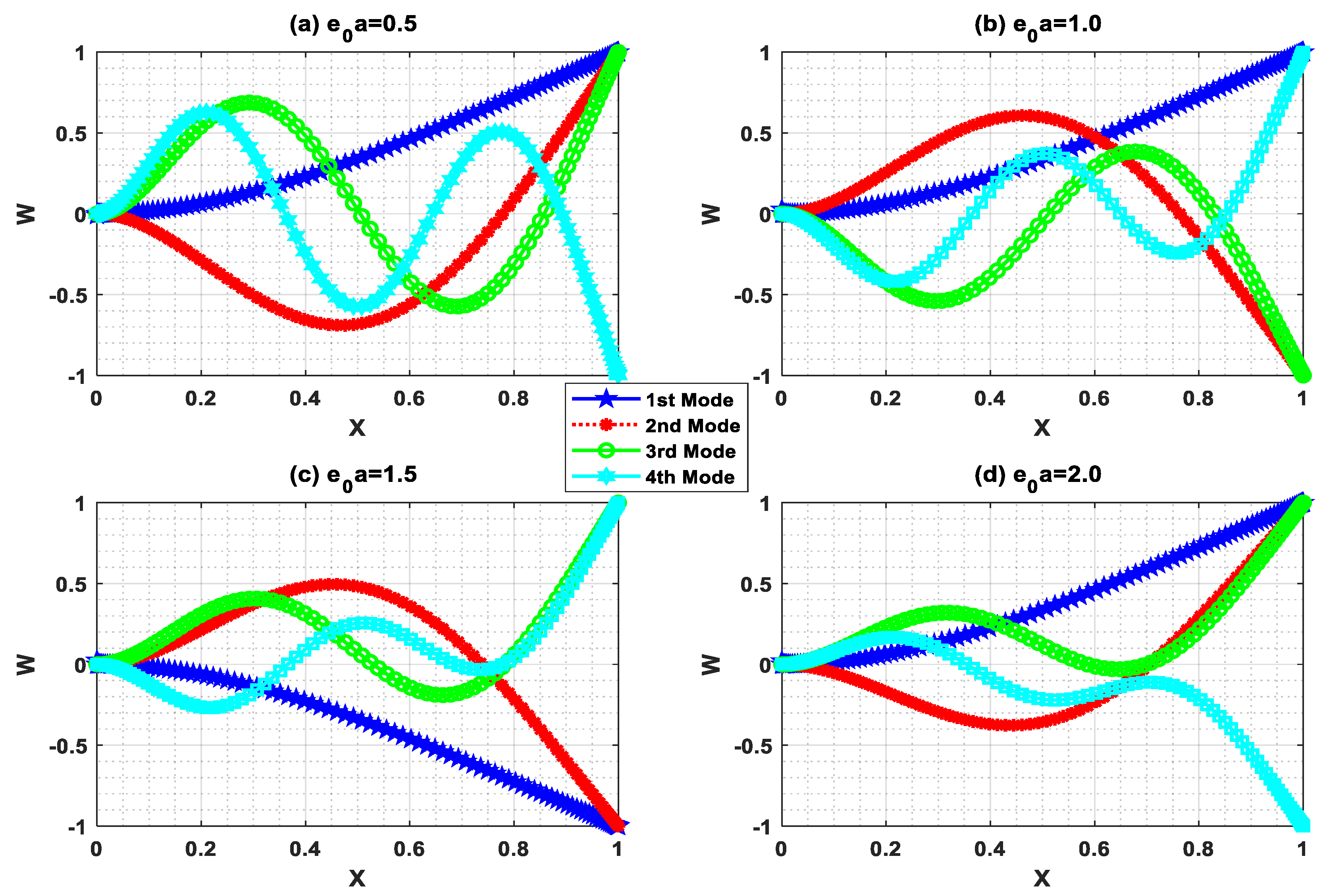
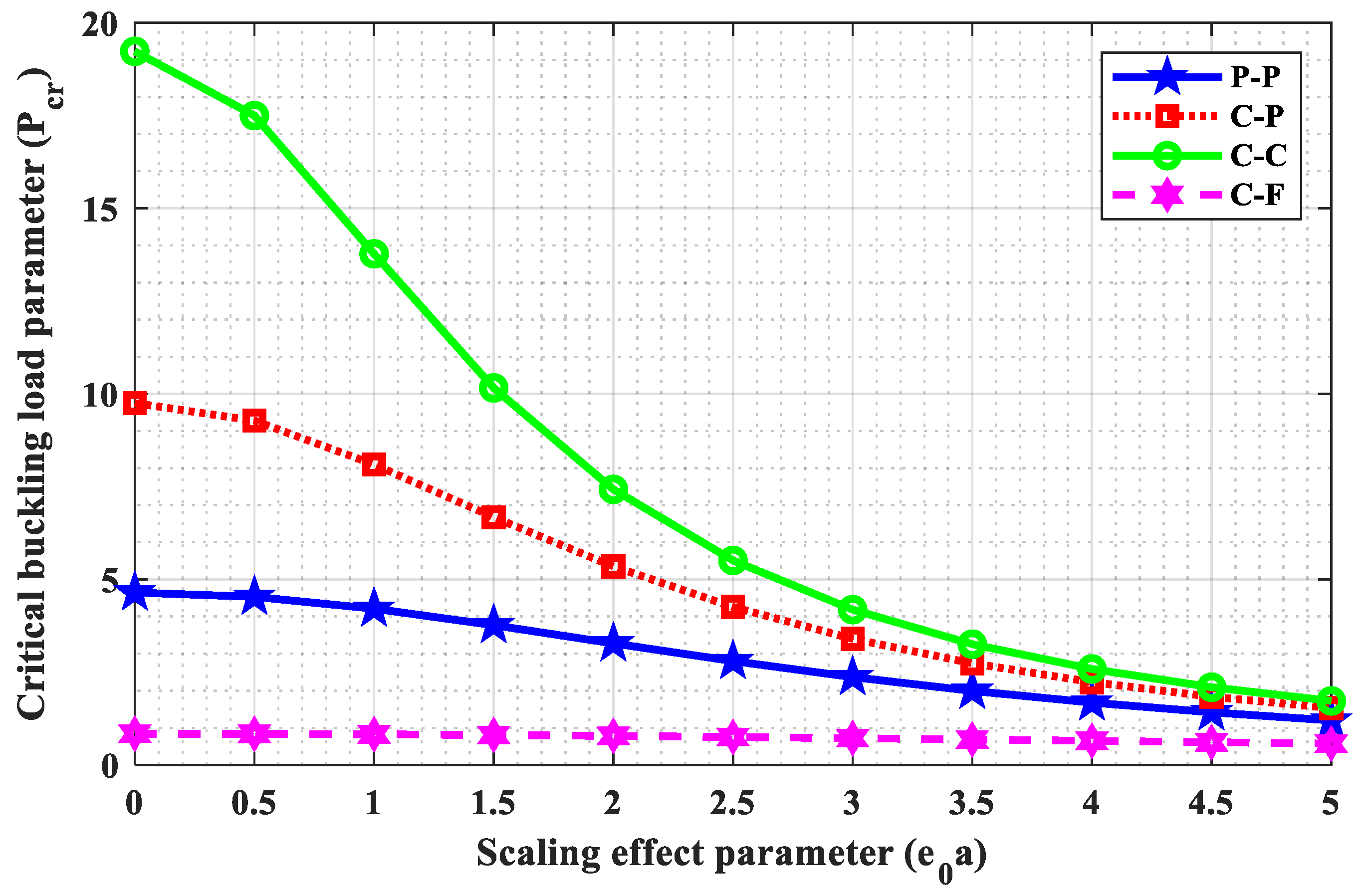
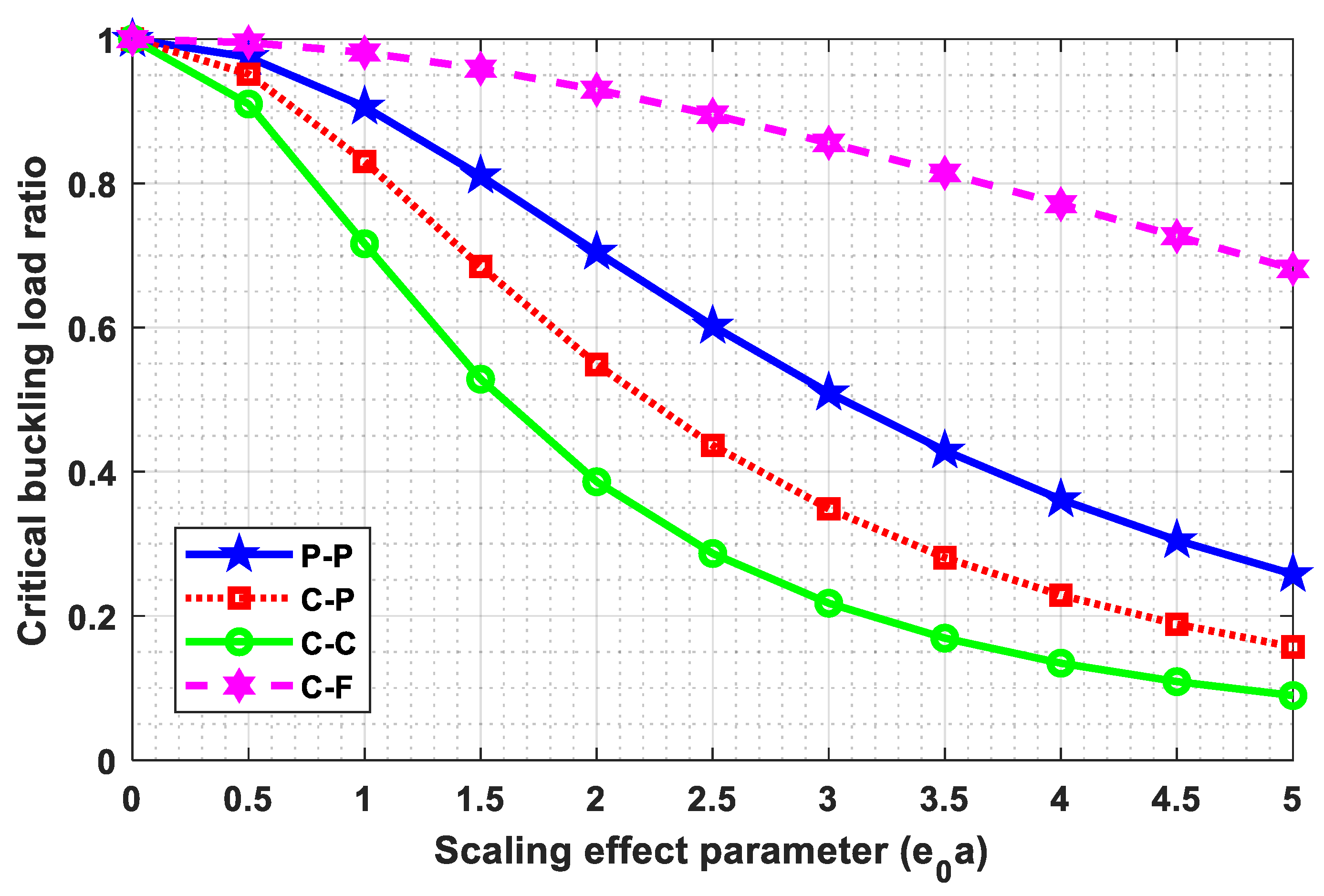
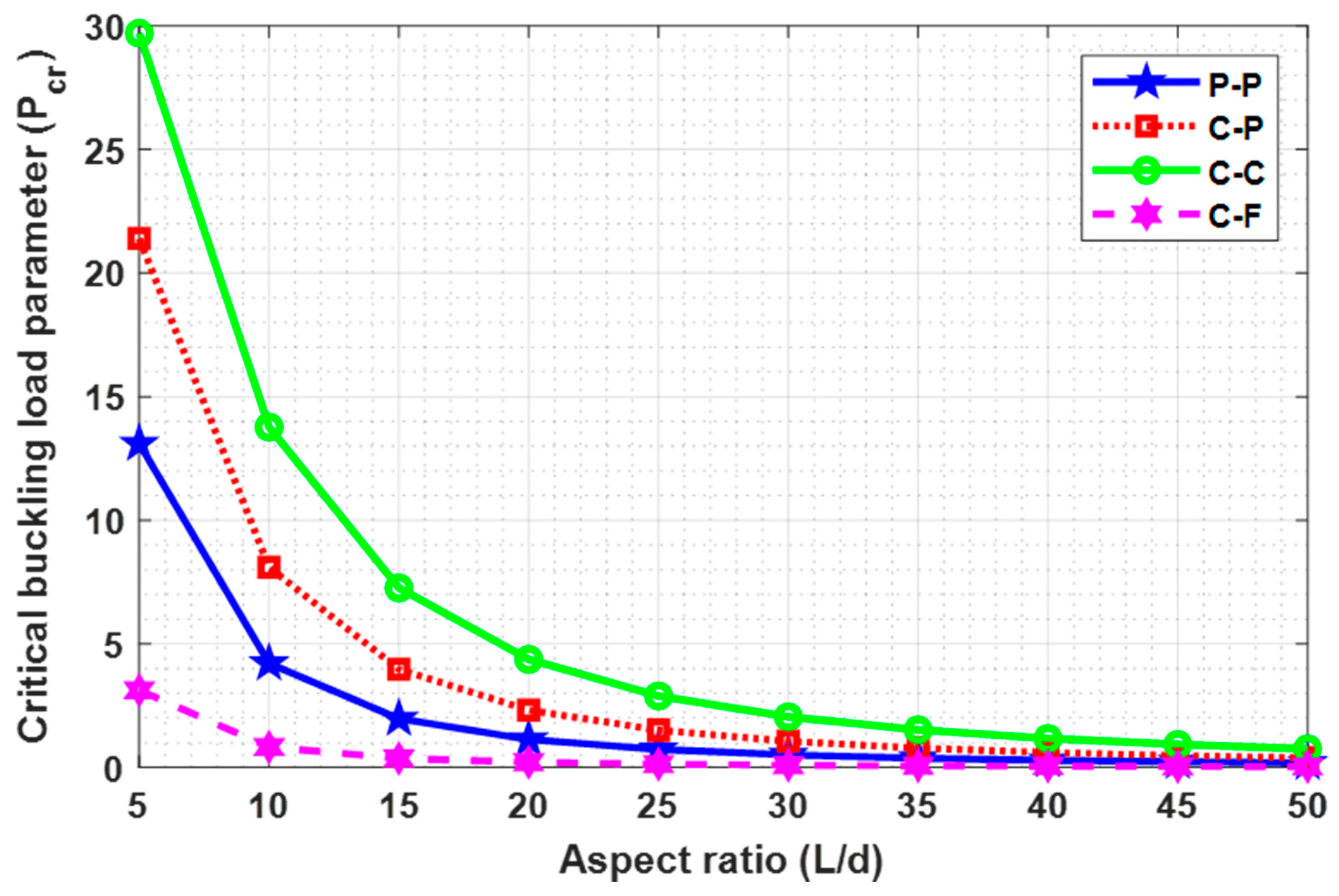
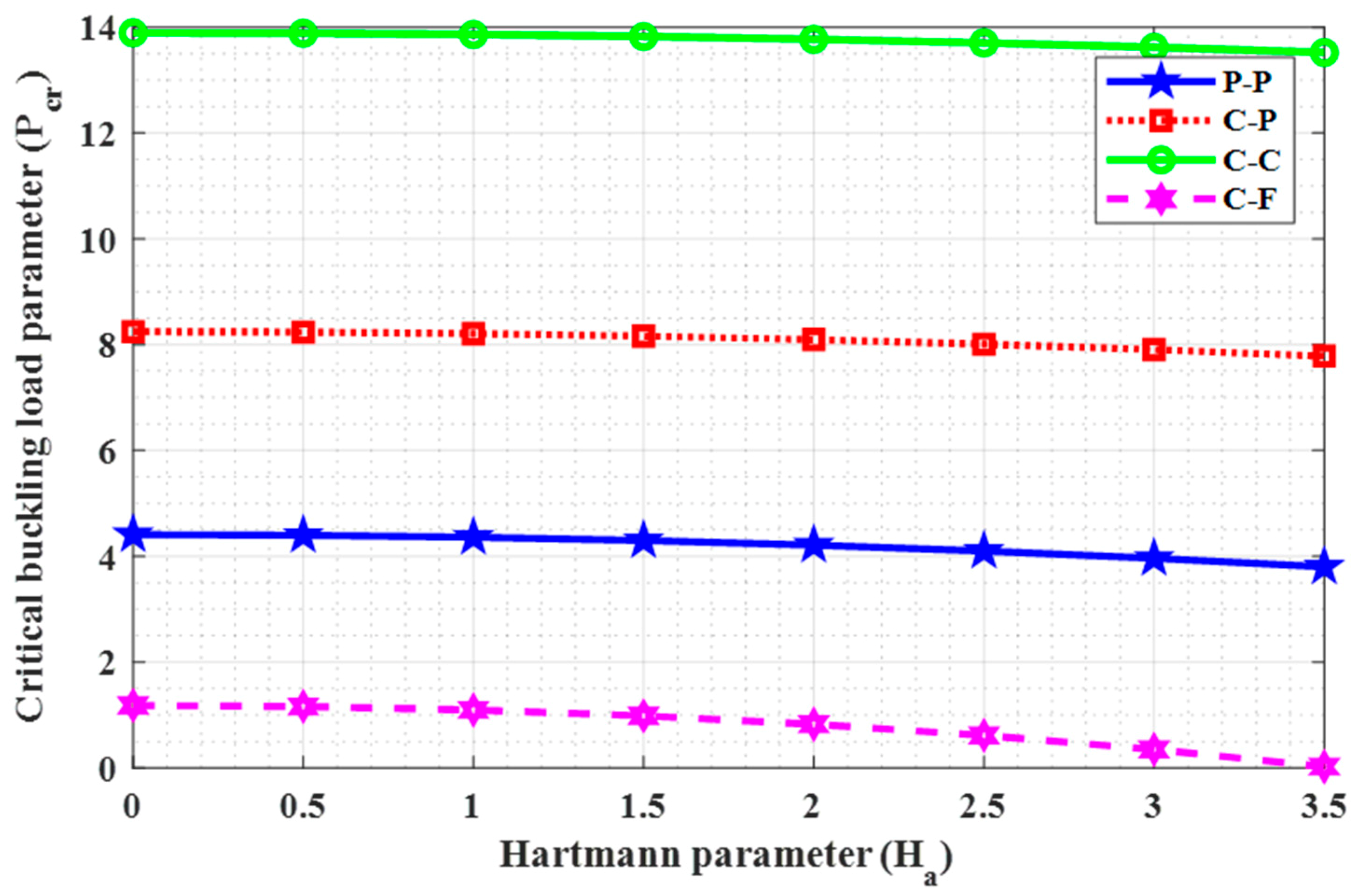
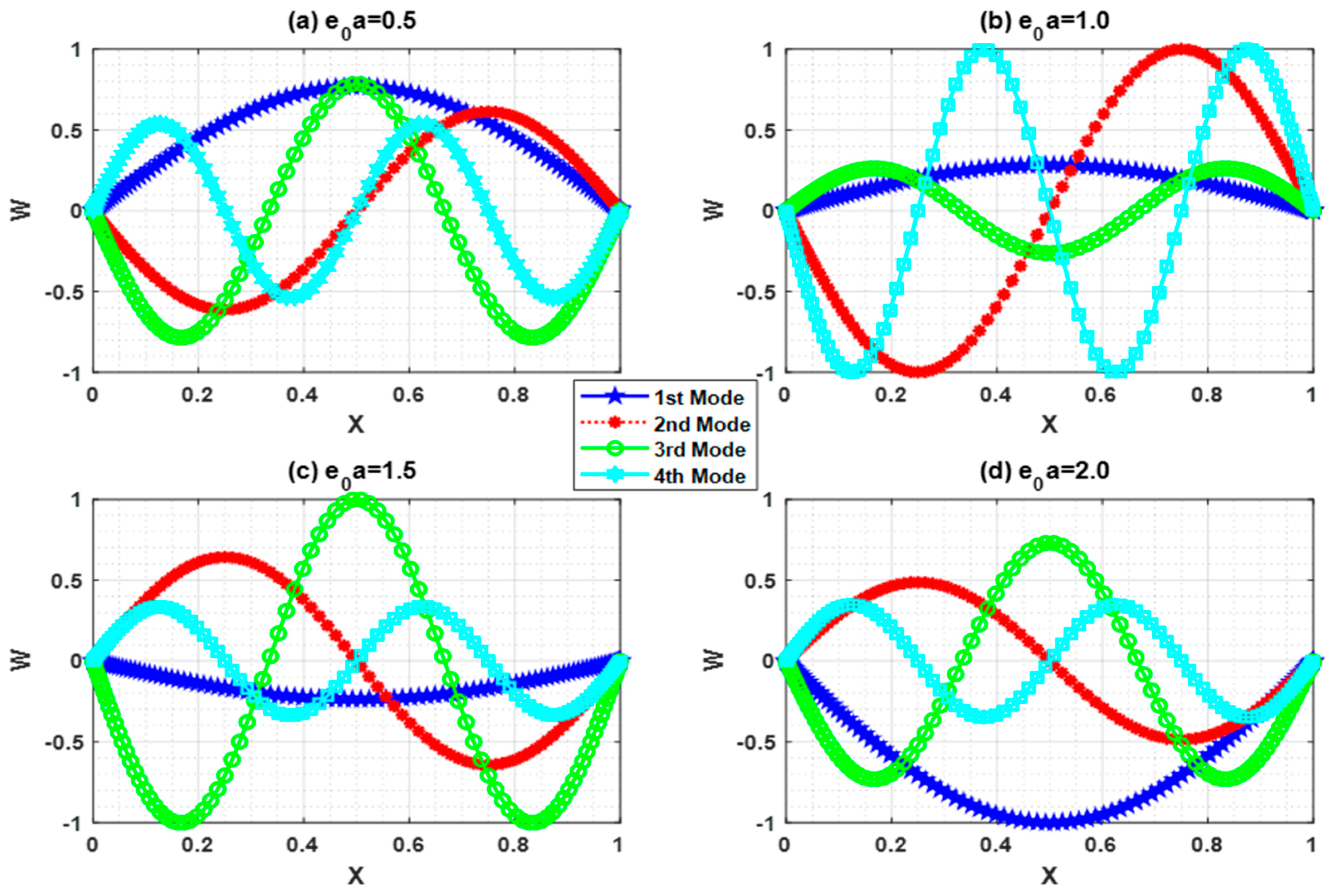
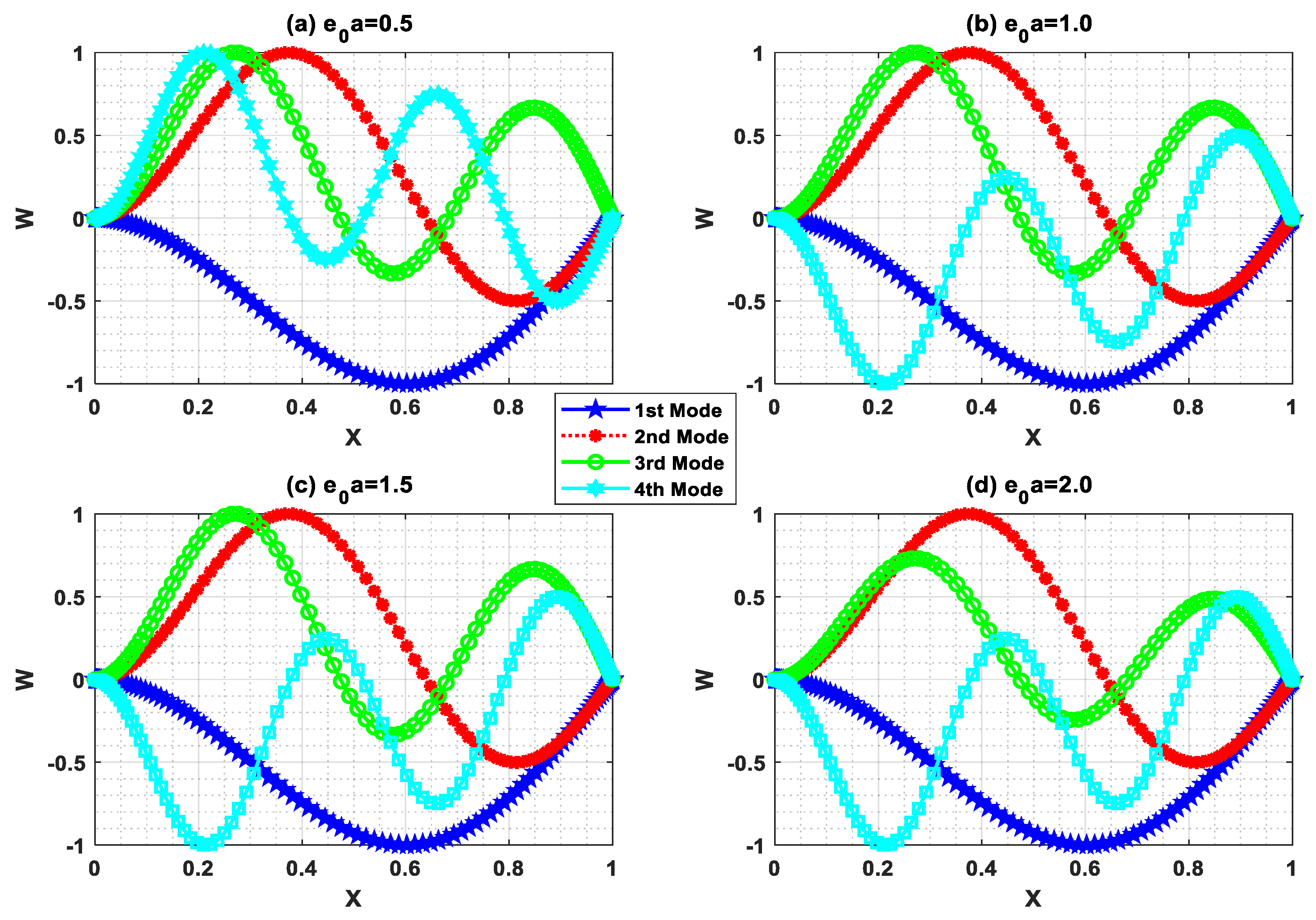
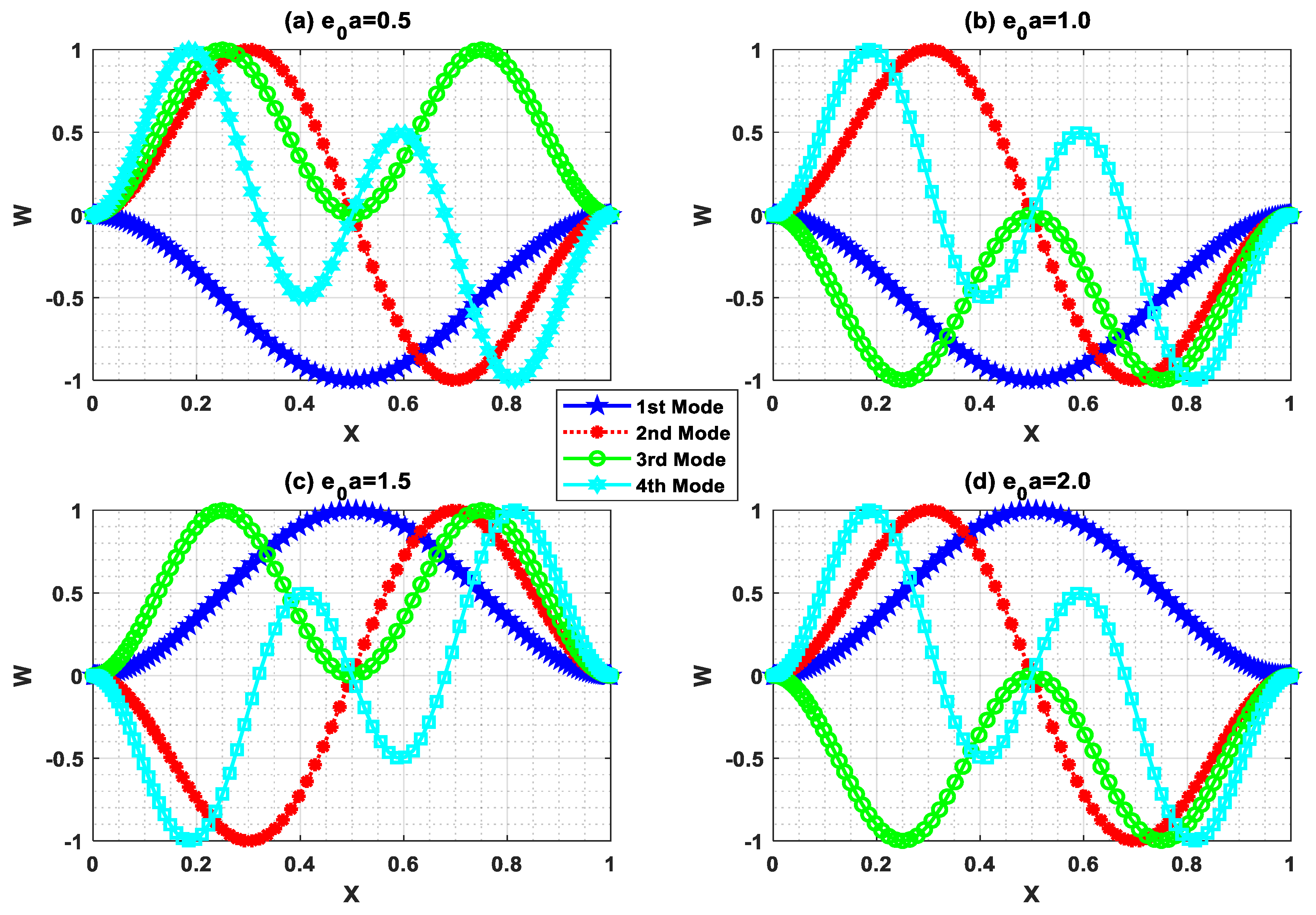
As per the present authors’ knowledge, the buckling behavior of the Euler–Bernoulli nanobeam placed in an electro-magnetic field using shifted Chebyshev polynomials Rayleigh-Ritz method has been studied for the first time for “Pined–Pined (P-P), Clamped–Pined (C-P), Clamped–Clamped (C-C), and Clamped-Free (C-F)” boundary conditions. Euler–Bernoulli nanobeam is combined with Hamilton’s principle to derive the governing equation. Also, a closed-form solution for the Pined–Pined (P-P) boundary condition has been obtained by using the Navier’s technique. Critical buckling load for all the classical boundary conditions were obtained and a parametric study has been carried out to comprehend the effects of various scaling parameters on the critical buckling load through graphical and tabular results. Further, buckling mode shapes for different boundary conditions were drawn to show the sensitivity towards various scaling parameters.
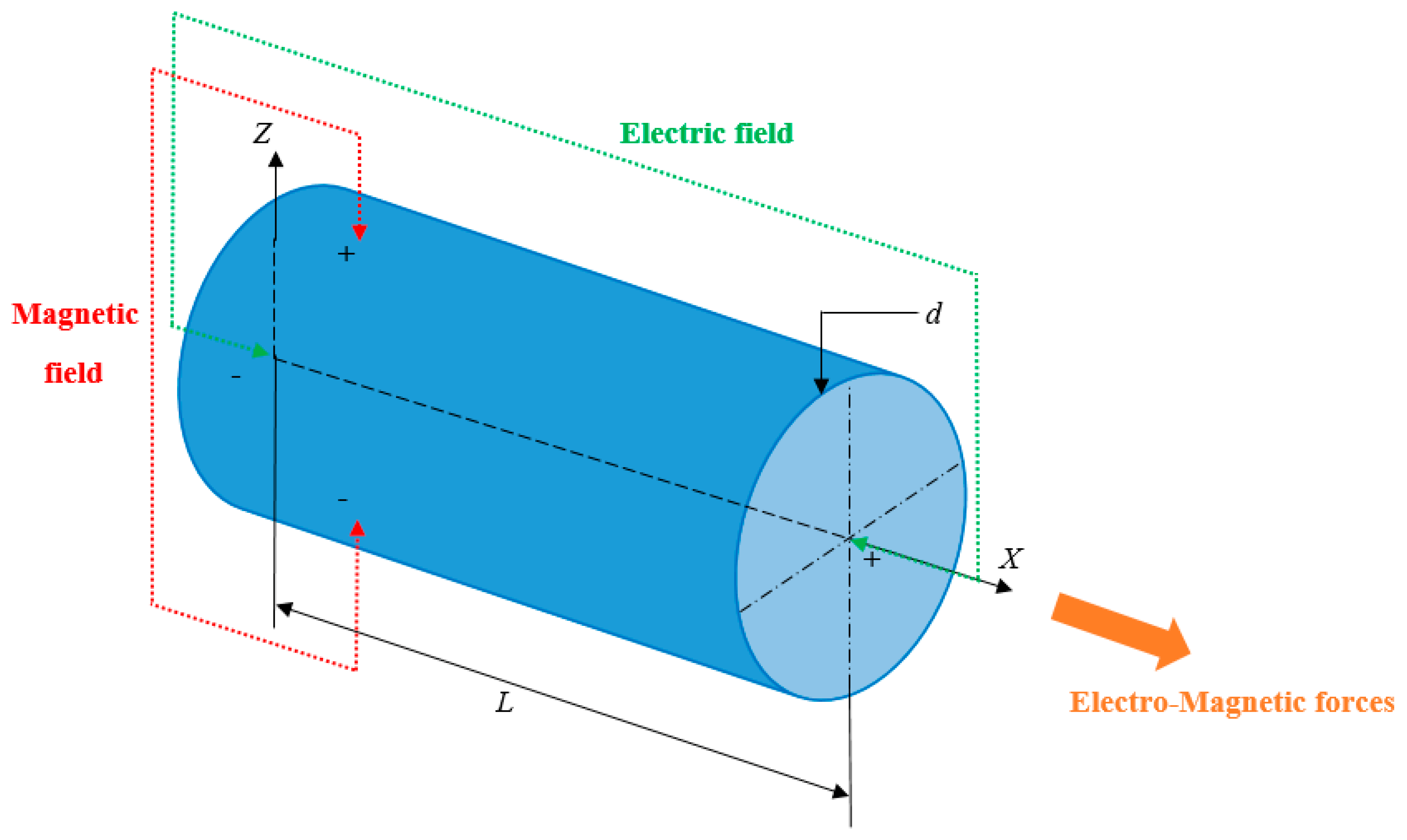
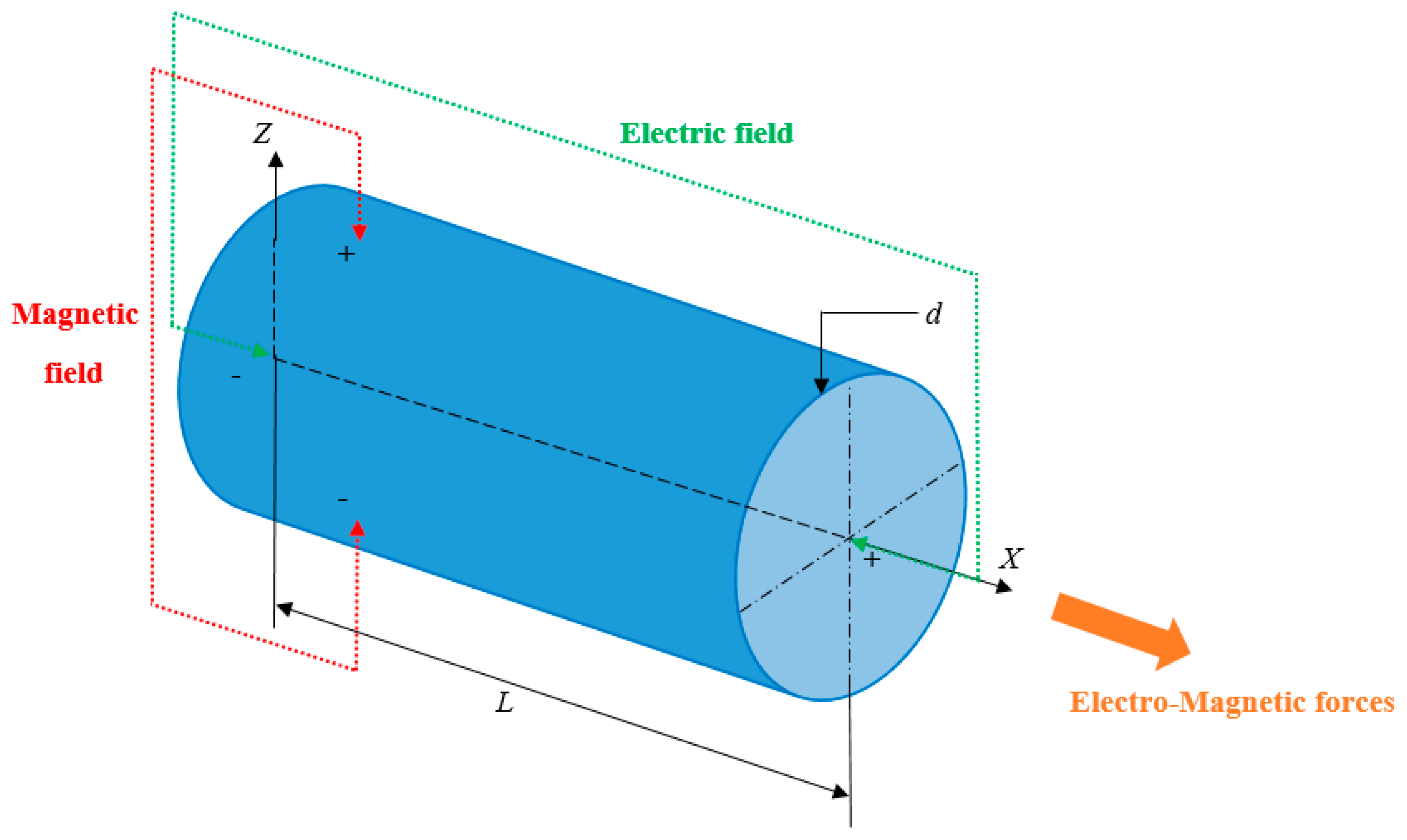
2. Proposed Model for Electromagnetic Nanobeam
In this study, the nanobeam with length
and diameter
is placed in an electromagnetic field with the electric field intensity as
and the magnetic flux density as
. The schematic diagram for continuum model of the nanobeam is shown in
Figure 1. Then, by Ohm’s law, the current density
of the system due to the induced current (because of Lorentz force) is given as [
31]
where
is the electrical conductivity,
is the magnetic permeability of free space, and
is the magnetic field strength. By neglecting the electric field intensity, the nanobeam experiences a magnetic force or Pondermotive force which is denoted by
and can be expressed as [
31]
According to Euler–Bernoulli beam theory, the displacement field at any point may be stated as [
32]
Here,
and
represent displacements along
and
directions, respectively, and
denotes the transverse displacement of the point on the mid-plane of the beam. The strain-displacement relation may be expressed as
Under the framework of Euler–Bernoulli nanobeam, the variation of strain energy
and the variation of work done by external force
are presented as
where
is the normal stress,
is the normal strain, and
is the bending moment of nanobeam. The Hamilton’s principle for the conservative system is stated as
Substituting Equations (5)–(7) and setting
, we have
The equation of motion for buckling behavior can be obtained as
For an isotropic nonlocal beam, the nonlocal elasticity theory of Eringen can be expressed as [
4]
where
is the nonlocal parameter,
is Young’s modulus. Here
and
denote material constant and internal characteristic length, respectively. Multiplying Equation (10) by
and integrating over
, the nonlocal constitutive relation for Euler–Bernoulli nanobeam may be expressed as
where
, is the second moment of area. Using Equation (9) in Equation (11) and rearranging, the nonlocal bending moment can be obtained as
Equating the nonlocal strain energy with work done by an external force, we obtain
Substituting Equation (12) in Equation (9), we obtain the governing equation of motion as
Let us define the following nondimensional parameters
= nondimensional spatial coordinate
nondimensional transverse displacement
dimensionless frequency parameter
dimensionless nonlocal parameter
dimensionless Hartmann parameter.
Incorporating the above nondimensional parameters in Equations (13) and (14), we have





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}