Dual-Stimuli Responsive Carbon Nanotube Sponge-PDMS Amphibious Actuator



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Synthesis of CNT Sponge
2.2. Fabrication of the Bimorph Actuator
3. Results
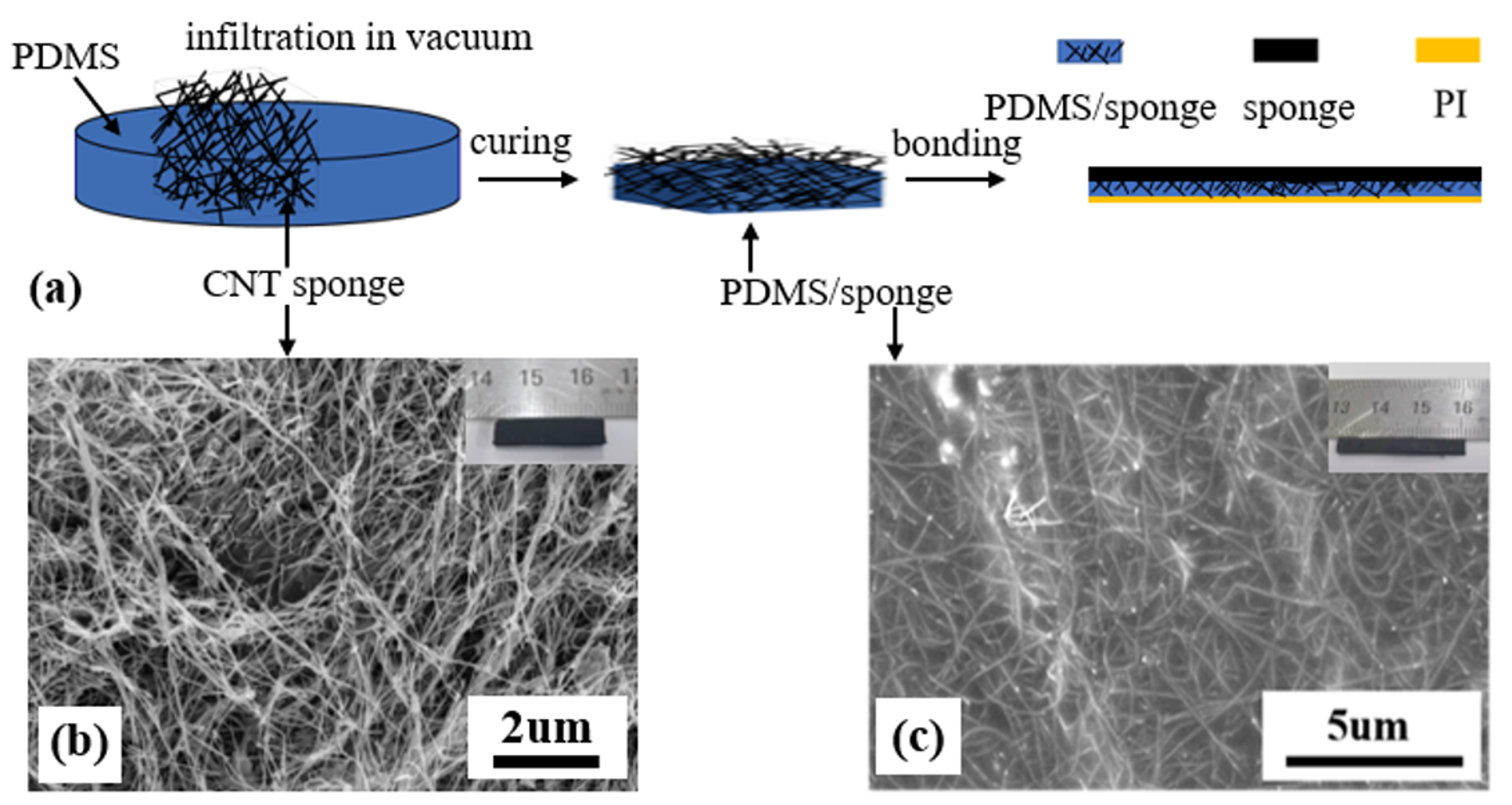
3.1. Morphology of the Sponge and Composite
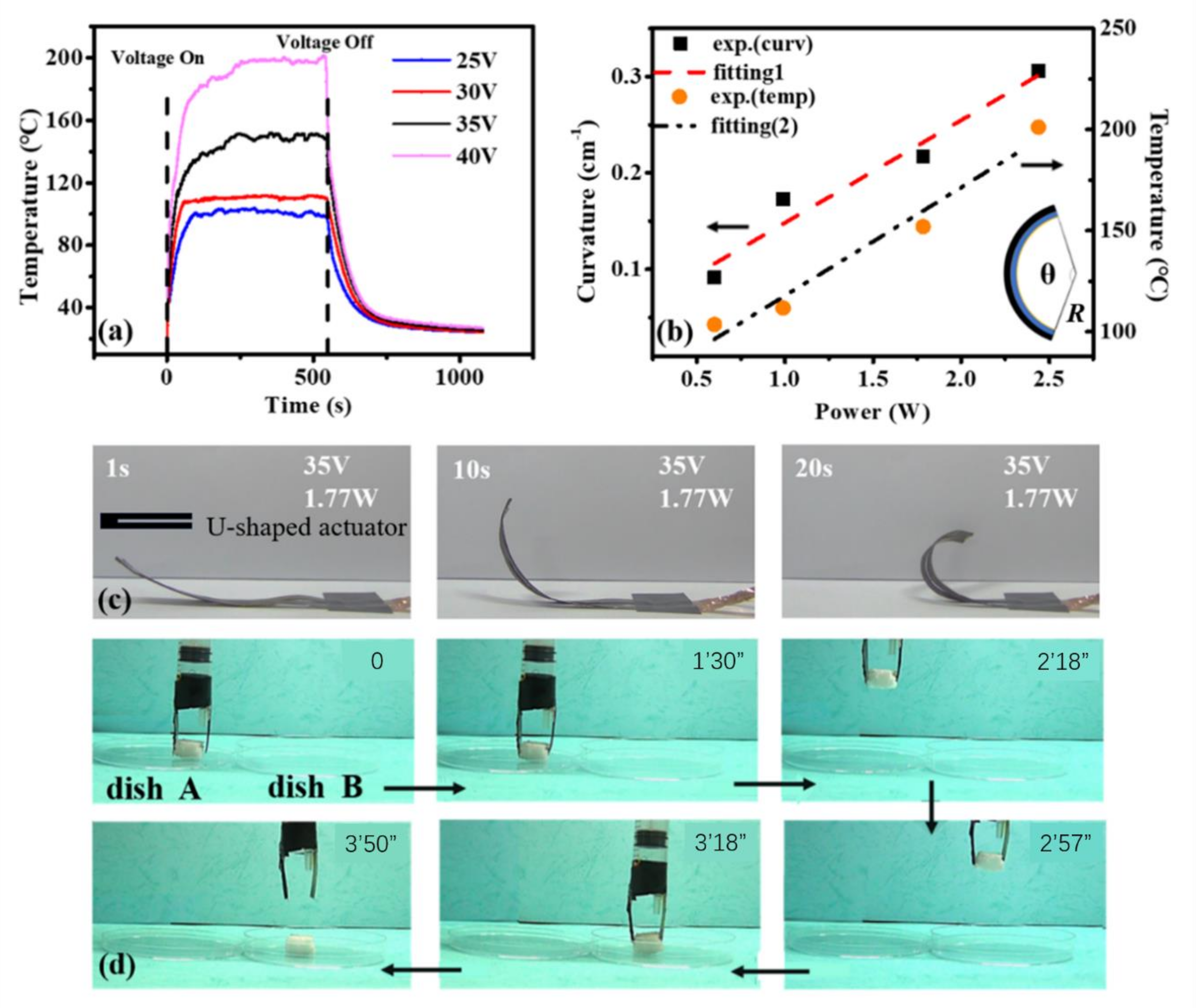
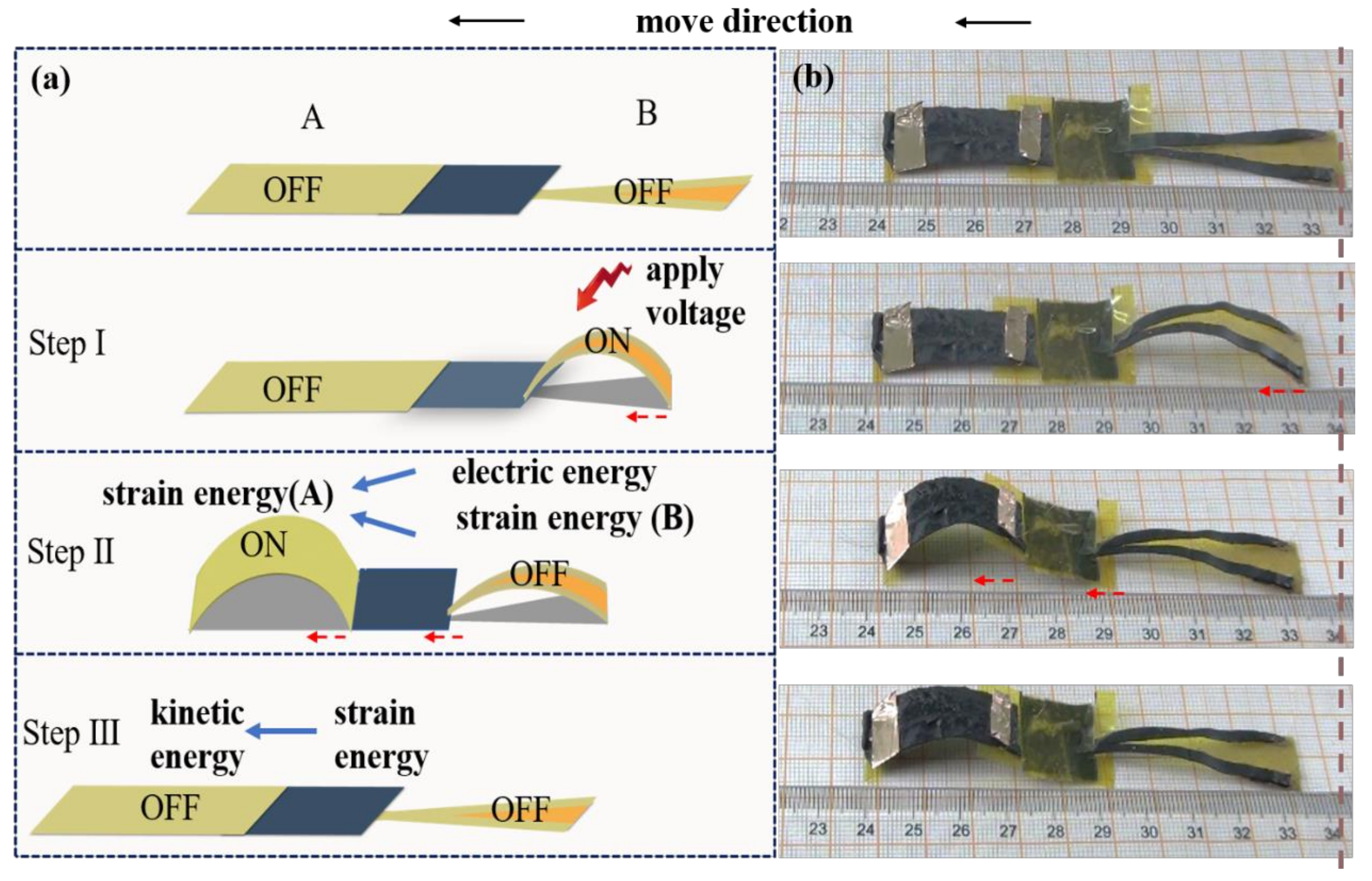
3.2. Electrothermal Actuation
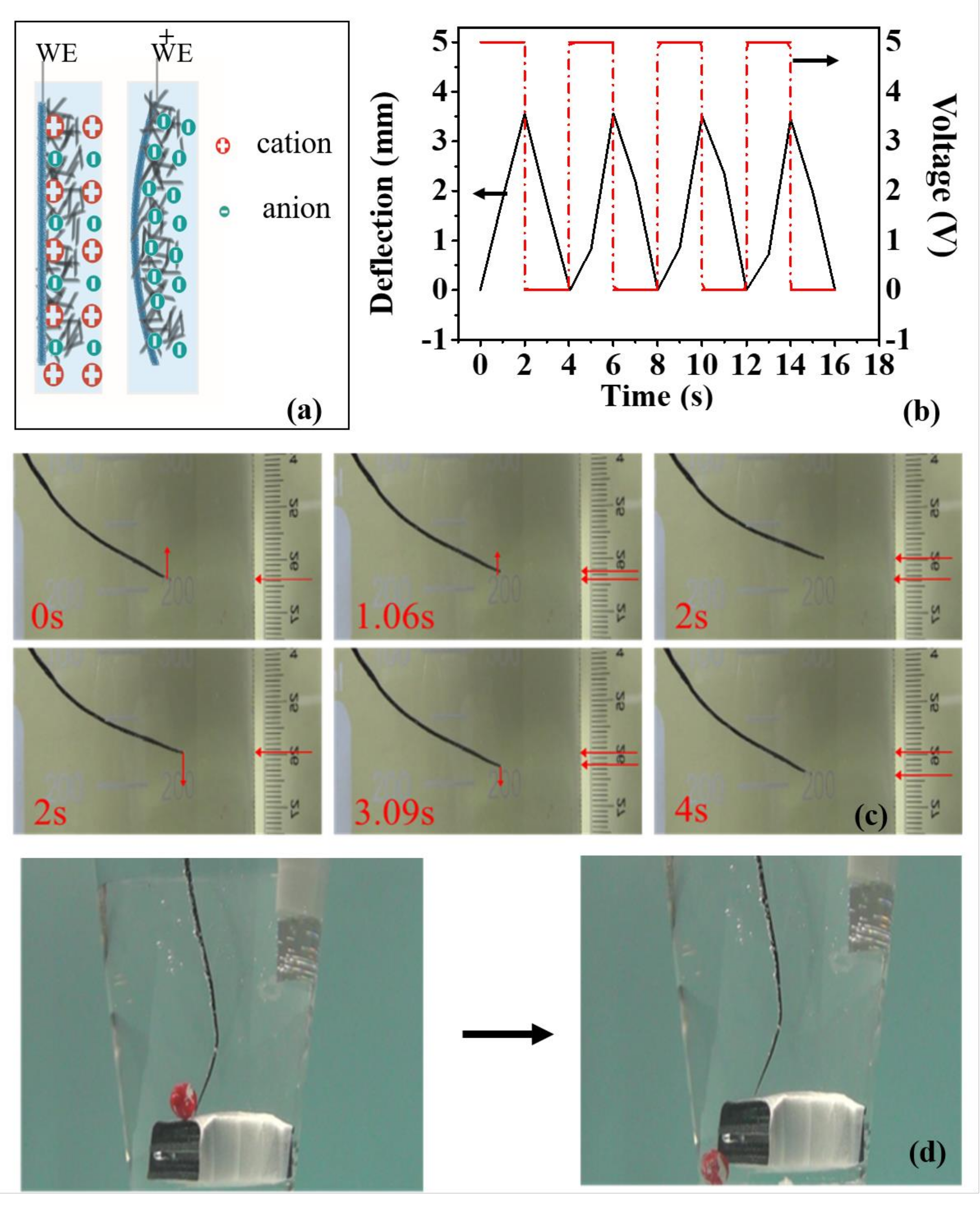
3.3. Electrochemical Actuation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fan, J.; Li, G. High performance and tunable artificial muscle based on two-way shape memory polymer. Rsc Adv. 2017, 7, 1127–1136. [Google Scholar] [CrossRef]
- Aliev, A.E.; Oh, J.; Kozlov, M.E.; Kuznetsov, A.A.; Fang, S.; Fonseca, A.F.; Ovalle, R.; Lima, M.D.; Haque, M.H.; Gartstein, Y.N. Giant-Stroke, Superelastic Carbon Nanotube Aerogel Muscles. Science 2009, 323, 1575–1578. [Google Scholar] [CrossRef] [PubMed]
- Yang, Q.; Fan, J.; Li, G. Artificial muscles made of chiral two-way shape memory polymer fibers. Appl. Phys. Lett. 2016, 109, 836. [Google Scholar] [CrossRef]
- Velosamoncada, L.A.; Aguileracortés, L.A.; Gonzálezpalacios, M.A. Design of a Novel MEMS Microgripper with Rotatory Electrostatic Comb-Drive Actuators for Biomedical Applications. Sensors 2018, 18, 1664. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, Y.; Liu, J.; Meng, L.; Chen, H. A multi-segment soft actuator for biomedical applications based on IPMCs. In Proceedings of the Electroactive Polymer Actuators and Devices, San Diego, CA, USA, 9–12 March 2015. [Google Scholar]
- Yeom, S.W.; Oh, I.K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators. Smart Mater. Struct. 2009, 18, 085002. [Google Scholar] [CrossRef]
- Kim, S.H.; Hashi, S.; Ishiyama, K. Methodology of Dynamic Actuation for Flexible Magnetic Actuator and Biomimetic Robotics Application. IEEE Trans. Magn. 2010, 46, 1366–1369. [Google Scholar] [CrossRef]
- Jin, K.; Zhang, S.; Zhou, S.; Qiao, J.; Song, Y.; Di, J.; Zhang, D.; Li, Q. Self-plied and twist-stable carbon nanotube yarn artificial muscles driven by organic solvent adsorption. Nanoscale 2018, 10, 8180–8186. [Google Scholar] [CrossRef]
- Ishihara, K.; Morimoto, J. An optimal control strategy for hybrid actuator systems: Application to an artificial muscle with electric motor assist. Neural Netw. 2018, 99, 92–100. [Google Scholar] [CrossRef]
- Li, H.; Luo, Y.; Gao, X. Preparation of Soft Shape Memory Polymer and Its Application as a Compliant Thermal mil riggered Gripper. Macromol. Chem. Phys. 2019, 15, 1900229. [Google Scholar] [CrossRef]
- Ge, Q.; Westbrook, K.K.; Mather, P.T.; Dunn, M.L.; Jerry Qi, H. Thermomechanical behavior of a two-way shape memory composite actuator. Smart Mater. Struct. 2013, 22, 055009. [Google Scholar] [CrossRef]
- Bodaghi, M.; Damanpack, A.; Liao, W. Self-expanding/shrinking structures by 4D printing. Smart Mater. Struct. 2016, 25, 105034. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.-R.; Ahn, S.-H. Curved Shape Memory Alloy-based Soft Actuators and Application to Soft Gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Sreekumar, M.; Nagarajan, T.; Singaperumal, M.; Zoppi, M.; Molfino, R. Critical review of current trends in shape memory alloy actuators for intelligent robots. Ind. Robot Int. J. 2007, 34, 285–294. [Google Scholar] [CrossRef]
- Lan, C.C.; Fan, C.H. Investigation on pretensioned shape memory alloy actuators for force and displacement self-sensing. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Chouhan, P.; Nath, T.; Lad, B.K.; Palani, I.A. Investigation on actuation and thermo-mechanical behaviour of Shape Memory Alloy spring using hot water. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 149, p. 012147. [Google Scholar]
- Bachaga, T.; Zhang, J.; Khitouni, M.; Sunol, J.J. NiMn-based Heusler magnetic shape memory alloys: A review. Int. J. Adv. Manuf. Technol. 2019, 103, 2761–2772. [Google Scholar] [CrossRef]
- Shang, J.; Le, X.; Zhang, J.; Chen, T.; Theato, P. Trends in polymeric shape memory hydrogels and hydrogel actuators. Polym. Chem. 2019, 10, 1036–1055. [Google Scholar] [CrossRef]
- Li, Z.; Li, K.; He, H.; Zhou, Y.; He, Z. Tough and tunable shape memory PLA/PAE melt-blends actuated by temperature. Iran. Polym. J. 2019, 28, 371–378. [Google Scholar] [CrossRef]
- Meng, H.; Xiao, P.; Gu, J.; Wen, X.; Xu, J.; Zhao, C.; Zhang, J.; Chen, T. Self-healable macro-/microscopic shape memory hydrogels based on supramolecular interactions. Chem. Commun. 2014, 50, 12277–12280. [Google Scholar] [CrossRef]
- Le, X.; Lu, W.; Zheng, J.; Tong, D.; Zhao, N.; Ma, C.; Xiao, H.; Zhang, J.; Huang, Y.; Chen, T. Stretchable supramolecular hydrogels with triple shape memory effect. Chem. Sci. 2016, 7, 6715–6720. [Google Scholar] [CrossRef]
- Sessini, V.; Raquez, J.-M.; Lo Re, G.; Mincheva, R.; Maria Kenny, J.; Dubois, P.; Peponi, L. Multiresponsive Shape Memory Blends and Nanocomposites Based on Starch. ACS Appl. Mater. Interfaces 2016, 8, 19197–19201. [Google Scholar] [CrossRef]
- Asaka, K.; Oguro, K. Bending of polyelectrolyte membrane platinum composites by electric stimuli. Part II. Response kinetics. J. Electroanal. Chem. 2000, 480, 186–198. [Google Scholar] [CrossRef]
- Baughman, R.H. Conducting polymer artificial muscles. Synth. Met. 1996, 78, 339–353. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Khoo, S.Y.; Kouzani, A.Z. Polyelectrolyte Soft Actuators: 3D Printed Chitosan and Cast Gelatin. 3D Print. Addit. Manuf. 2018, 5, 138–150. [Google Scholar] [CrossRef]
- Chen, T.; Liu, B. Graphene quantum dot–poly (vinylidene fluoride) composite for the preparation of asymmetric bilayer bending transducer. J. Mater. Sci. Mater. Electron. 2018, 29, 5206–5212. [Google Scholar] [CrossRef]
- Garcia-Torres, J.; Crean, C.; Vallés, E. Co-Ni-carbon flexible composite fibres for directional magnetic actuation. Mater. Des. 2017, 141, 9–16. [Google Scholar] [CrossRef]
- Song, Y.; Qin, S.; Gerringer, J.; Grunlan, J.C. Unusually fast and large actuation from multilayer polyelectrolyte thin films. Soft Matter 2019, 11, 2311–2314. [Google Scholar] [CrossRef]
- Wang, W.; Ahn, S.-H. Shape Memory Alloy-Based Soft Gripper with Variable Stiffness for Compliant and Effective Grasping. Soft Robot 2017, 4, 379–389. [Google Scholar] [CrossRef]
- Nöchel, U.; Behl, M.; Balk, M.; Lendlein, A. Thermally-Induced Triple-Shape Hydrogels: Soft Materials Enabling Complex Movements. ACS Appl. Mater. Interfaces 2016, 8, 28068–28076. [Google Scholar] [CrossRef]
- Wang, L.; Jian, Y.; Le, X.; Lu, W.; Ma, C.; Zhang, J.; Huang, Y.; Huang, C.-F.; Chen, T. Actuating and memorizing bilayer hydrogels for a self-deformed shape memory function. Chem. Commun. 2018, 54, 1229–1232. [Google Scholar] [CrossRef]
- Luzhuo, C.; Changhong, L.; Ke, L.; Chuizhou, M.; Chunhua, H.; Jiaping, W.; Shoushan, F. High-performance, low-voltage, and easy-operable bending actuator based on aligned carbon nanotube/polymer composites. ACS Nano 2011, 5, 1588–1593. [Google Scholar]
- Ying, H.; Wei, C.; Lu, L.; Liu, J.; Chang, C. Electromechanical Actuation with Controllable Motion Based on a Single-Walled Carbon Nanotube and Natural Biopolymer Composite. ACS Nano 2010, 4, 3498. [Google Scholar]
- George, R.; Kashyap, K.T.; Rahul, R.; Yamdagni, S. Strengthening in carbon nanotube/aluminium (CNT/Al) composites. Scr. Mater. 2005, 53, 1159–1163. [Google Scholar] [CrossRef]
- Zhang, X.; Pint, C.L.; Lee, M.H.; Schubert, B.E.; Jamshidi, A.; Takei, K.; Ko, H.; Gillies, A.; Bardhan, R.; Urban, J.J. Optically- and Thermally-Responsive Programmable Materials Based on Carbon Nanotube-Hydrogel Polymer Composites. Nano Lett. 2011, 11, 3239–3244. [Google Scholar] [CrossRef] [PubMed]
- Kyun, S.D.; Tae June, K.; Dae Weon, K.; Hyup, K.Y. Twistable and bendable actuator: A CNT/polymer sandwich structure driven by thermal gradient. Nanotechnology 2012, 23, 075501. [Google Scholar]
- Sellinger, A.T.; Wang, D.H.; Tan, L.-S.; Vaia, R.A. Electrothermal Polymer Nanocomposite Actuators. Adv. Mater. 2010, 22, 3430–3435. [Google Scholar] [CrossRef]
- Chen, W. Carbon Nanotube and Graphene Based Bio-Inspired Electrochemical Actuator. Adv. Mater. 2014, 26, 1025–1043. [Google Scholar]
- Baughman, R.H.; Cui, C.; Zakhidov, A.A. Carbon Nanotube Actuators. Science 1999, 284, 1340–1344. [Google Scholar] [CrossRef]
- Lee, J.A.; Baughman, R.H.; Kim, S.J. High performance electrochemical and electrothermal artificial muscles from twist-spun carbon nanotube yarn. Nano Converg. 2015, 2, 8. [Google Scholar] [CrossRef]
- Lee, J.A.; Li, N.; Haines, C.S.; Kim, K.J.; Lepró, X.; Ovalle-Robles, R.; Kim, S.J.; Baughman, R.H. Electrochemically Powered, Energy-Conserving Carbon Nanotube Artificial Muscles. Adv. Mater. 2017, 29, 1700870. [Google Scholar] [CrossRef]
- Terasawa, N.; Asaka, K. Electrochemical and Electromechanical Properties of Activated Multi-walled Carbon Nanotube Polymer Actuator that Surpass the Performance of a Single-walled Carbon Nanotube Polymer Actuator. Mater. Today Proc. 2016, 3, S178–S183. [Google Scholar] [CrossRef]
- Ying, H.; Liu, J.; Chang, L.; Yang, L.; Xu, A.; Ke, Q.; Lu, P.; Guan, W.; Wei, C.; Wu, Y. Electrically and Sunlight-Driven Actuator with Versatile Biomimetic Motions Based on Rolled Carbon Nanotube Bilayer Composite. Adv. Funct. Mater. 2017, 27, 1704388. [Google Scholar]
- Zhou, P.; Chen, L.; Yao, L.; Weng, M.; Zhang, W. Humidity- and light-driven actuators based on carbon nanotube-coated paper and polymer composite. Nanoscale 2018, 10, 8422–8427. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Mou, L.; Zhang, R.; Sun, J.; Wang, R.; An, B.; Chen, H.; Inoue, K.; Ovalle-Robles, R.; Liu, Z. Multi-responsive and multi-motion bimorph actuator based on super-aligned carbon nanotube sheets. Carbon 2019, 148, 487–495. [Google Scholar] [CrossRef]
- Li, L.; Meng, J.; Hou, C.; Zhang, Q.; Li, Y.; Yu, H.; Wang, H. Dual-Mechanism and Multimotion Soft Actuators Based on Commercial Plastic Film. ACS Appl. Mater. Interfaces 2018, 10, 15122–15128. [Google Scholar] [CrossRef] [PubMed]
- Zhou, G.; Zhang, H.; Xu, S.; Gui, X.; Wei, H.; Leng, J.; Koratkar, N.; Zhong, J. Fast Triggering of Shape Memory Polymers using an Embedded Carbon Nanotube Sponge Network. Sci. Rep. 2016, 6, 24148. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, L.L.; Chen, Q.; Peng, Q.Y.; Yang, M.L.; Zhao, W.Q.; Lin, Z.S.; Xu, F.; Li, Y.B.; He, X.D. Highly Conductive Multifunctional rGO/CNT Hybrid Sponge for Electromagnetic Wave Shielding and Strain Sensor. Adv. Mater. Technol. 2019, 4, 1900043. [Google Scholar] [CrossRef]
- Cao, X.; He, J.; Li, H.; Kang, L.P.; He, X.X.; Sun, J.; Jiang, R.B.; Xu, H.; Lei, Z.B.; Liu, Z.H. CoNi2S4 Nanoparticle/Carbon Nanotube Sponge Cathode with Ultrahigh Capacitance for Highly Compressible Asymmetric Supercapacitor. Small 2018, 14, 1800998. [Google Scholar] [CrossRef]
- Zhou, Y.; Hou, J.X.; Chen, W.W.; Liu, Z.L. Carbon nanotube sponge 3D anodes for urine-powered microbial fuel cell. Energy Sources Part A Recovery Util. Environ. Eff. 2017, 39, 1543–1547. [Google Scholar] [CrossRef]
- Gui, X.C.; Wei, J.Q.; Wang, K.L.; Cao, A.Y.; Zhu, H.W.; Jia, Y.; Shu, Q.K.; Wu, D.H. Carbon Nanotube Sponges. Adv. Mater. 2010, 22, 617. [Google Scholar] [CrossRef]
- Yao, S.; Cui, J.; Cui, Z.; Zhu, Y. Soft electrothermal actuators using silver nanowire heaters. Nanoscale 2017, 9, 3797–3805. [Google Scholar] [CrossRef]
- Shao, L.-H.; Biener, J.; Jin, H.-J.; Biener, M.M.; Baumann, T.F.; Weissmueller, J. Electrically Tunable Nanoporous Carbon Hybrid Actuators. Adv. Funct. Mater. 2012, 22, 3029–3034. [Google Scholar] [CrossRef]
- Chuan, C.; Ngan, A.H.W. Reversible electrochemical actuation of metallic nanohoneycombs induced by pseudocapacitive redox processes. ACS Nano 2015, 9, 3984–3995. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Y.; Xing, Y.; Li, X.; Shao, L.-H. Dual-Stimuli Responsive Carbon Nanotube Sponge-PDMS Amphibious Actuator. Nanomaterials 2019, 9, 1704. https://doi.org/10.3390/nano9121704
Ji Y, Xing Y, Li X, Shao L-H. Dual-Stimuli Responsive Carbon Nanotube Sponge-PDMS Amphibious Actuator. Nanomaterials. 2019; 9(12):1704. https://doi.org/10.3390/nano9121704
Chicago/Turabian StyleJi, Yu, Yufeng Xing, Xuequan Li, and Li-Hua Shao. 2019. "Dual-Stimuli Responsive Carbon Nanotube Sponge-PDMS Amphibious Actuator" Nanomaterials 9, no. 12: 1704. https://doi.org/10.3390/nano9121704
APA StyleJi, Y., Xing, Y., Li, X., & Shao, L.-H. (2019). Dual-Stimuli Responsive Carbon Nanotube Sponge-PDMS Amphibious Actuator. Nanomaterials, 9(12), 1704. https://doi.org/10.3390/nano9121704