
Preparation and Application of Hydrophobic and Breathable Carbon Nanocoils/Thermoplastic Polyurethane Flexible Strain Sensors



Abstract
1. Introduction
2. Experimental Section
2.1. Materials
2.2. Synthesis of Carbon Nanocoils
2.3. Preparation of TPU Electrospun Membrane
2.4. Preparation of Flexible Strain Sensors Based on CNCs/TPU
2.5. Characterization
3. Results and Discussion
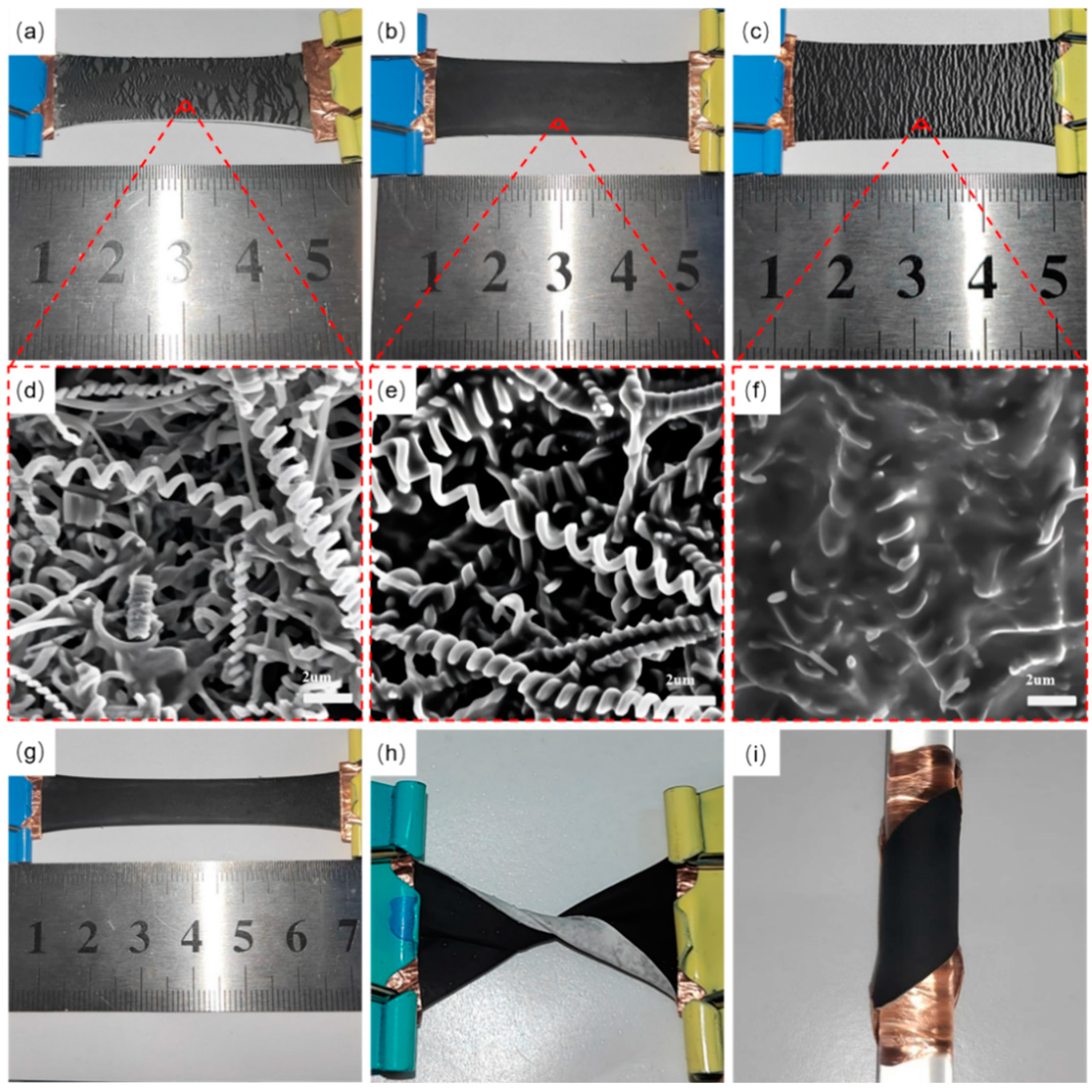
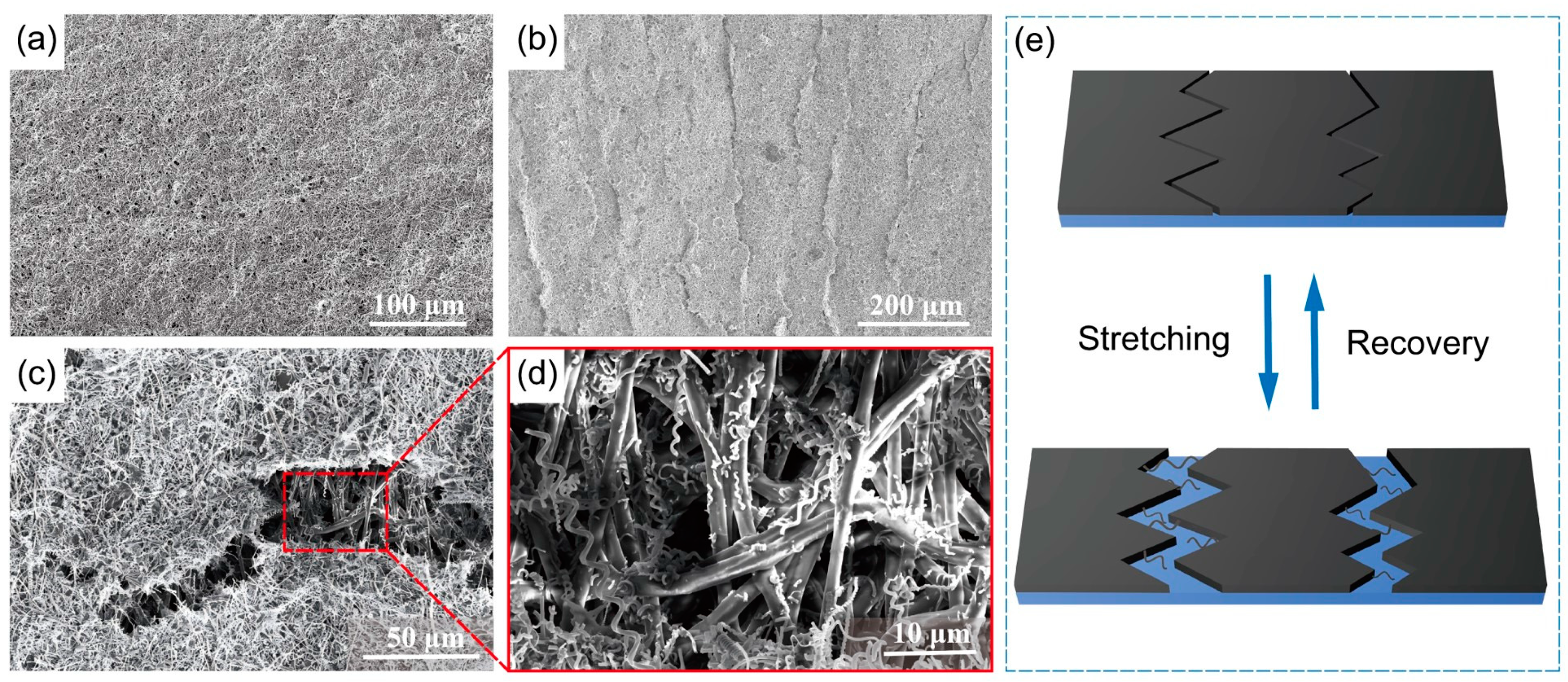
3.1. Effect of PDMS Content on the Sensing Layer
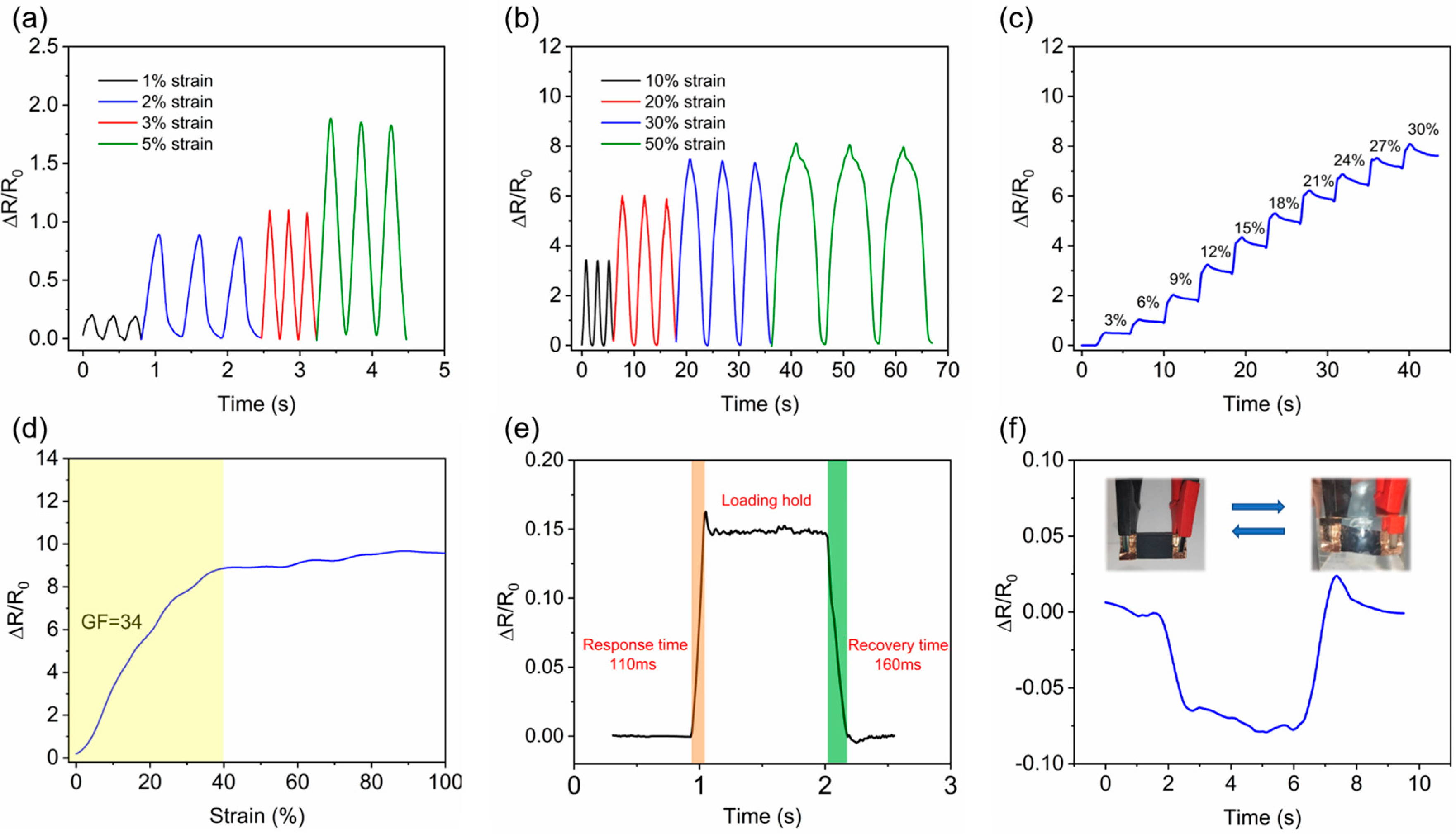
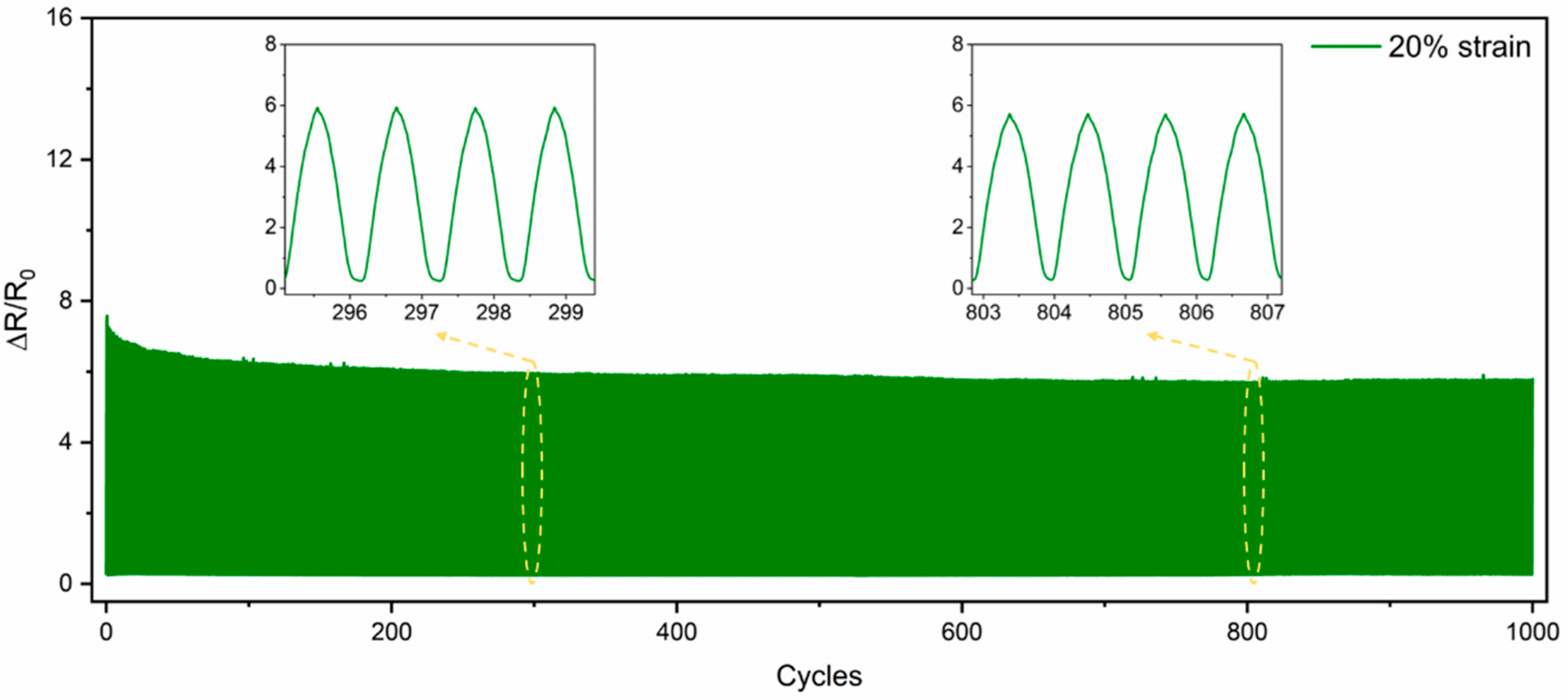
3.2. Characterization of the Sensor’s Performance
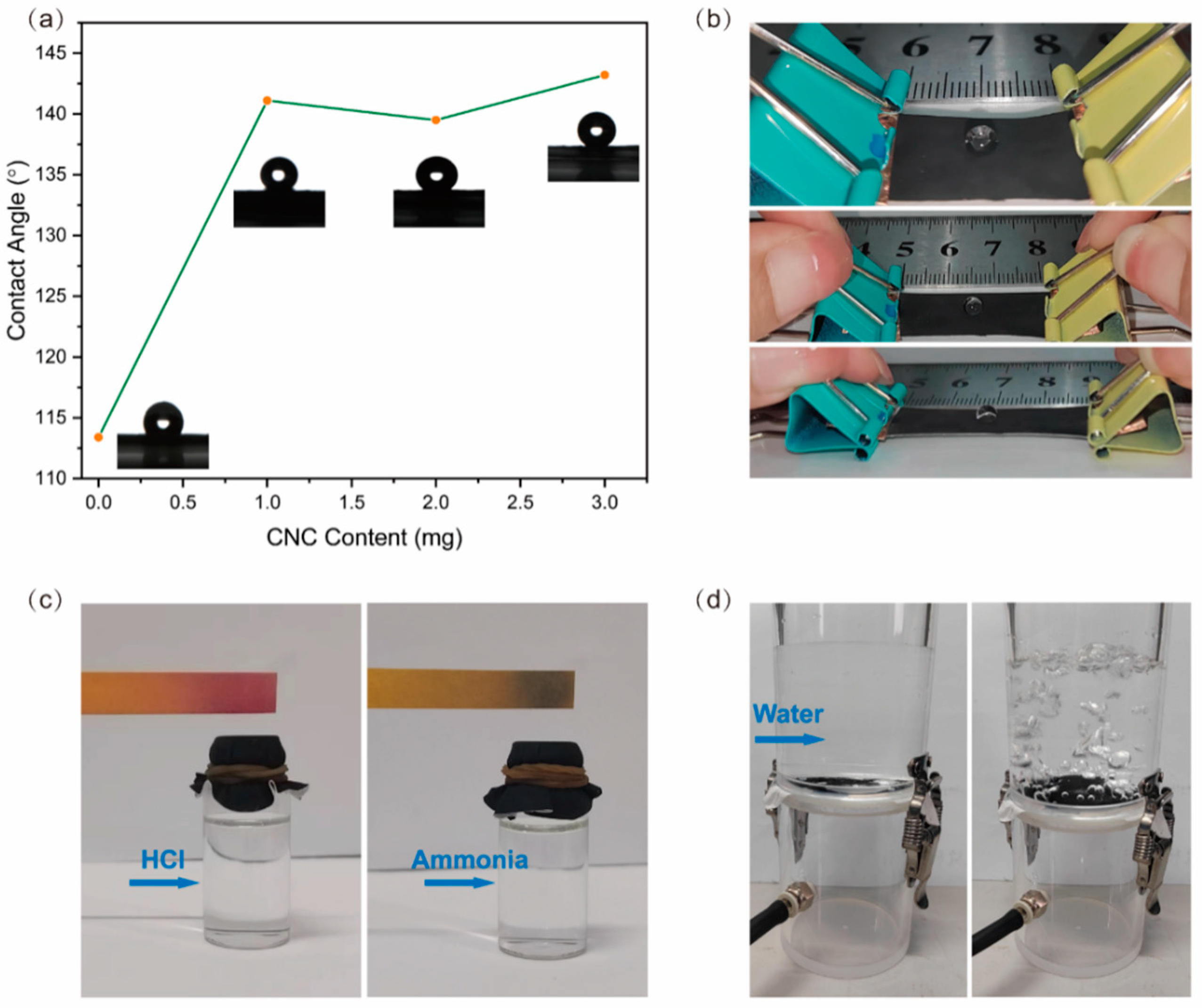
3.3. Hydrophobic Permeability
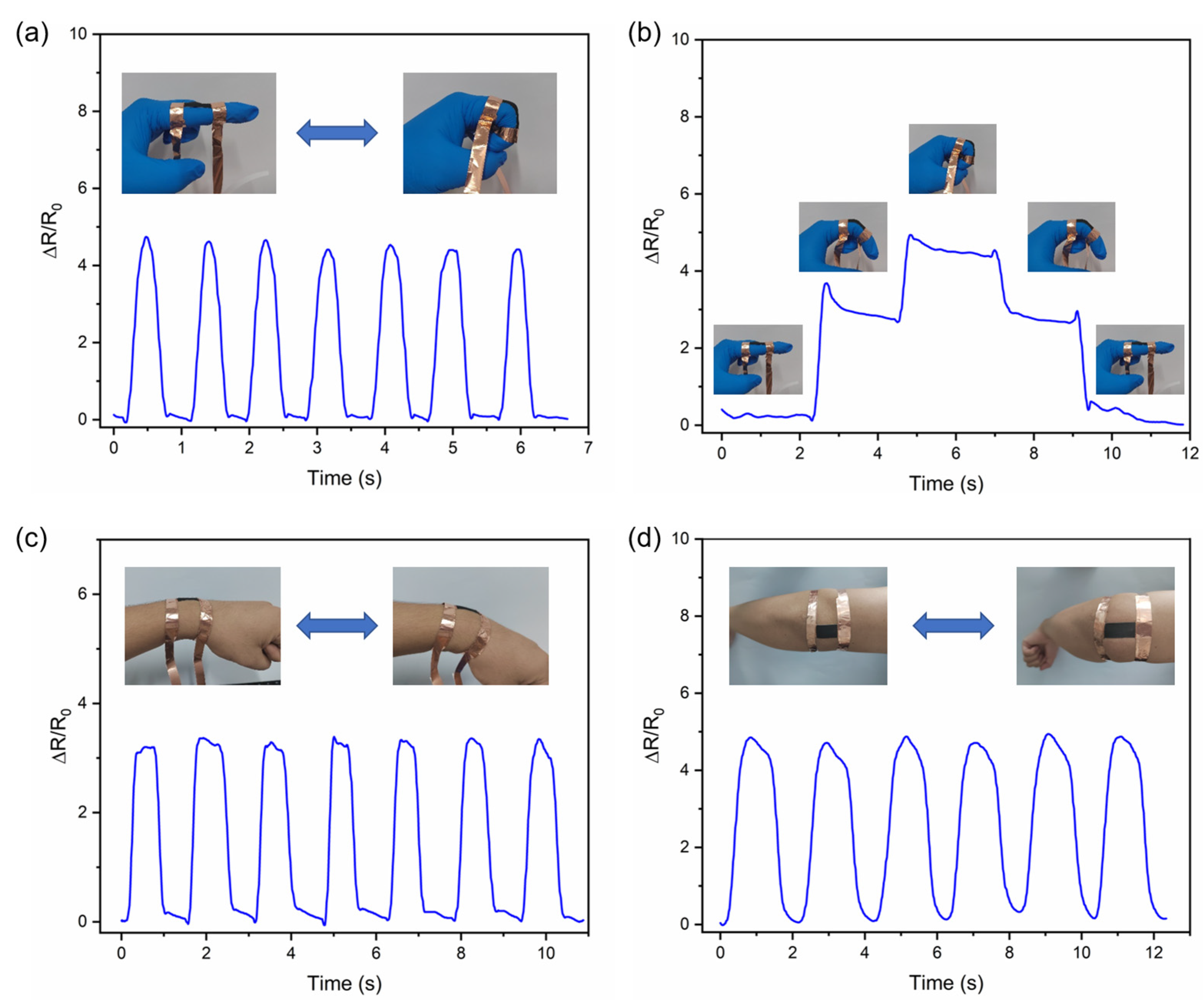
3.4. Application of Sensors in Human Motion Monitoring
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yuan, X.; Li, C.; Yin, X.; Yang, Y.; Ji, B.; Niu, Y.; Ren, L. Epidermal Wearable Biosensors for Monitoring Biomarkers of Chronic Disease in Sweat. Biosensors 2023, 13, 313. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wang, Y.; Wei, Q.; Li, M.; Chen, X. 3D Printable, Stretchable, Anti-Freezing and Rapid Self-Healing Organogel-Based Sensors for Human Motion Detection. J. Colloid Interface Sci. 2024, 653, 1514–1525. [Google Scholar] [CrossRef] [PubMed]
- Jang, H.-S.; Lee, K.H.; Kim, B.H. Flexible Mechanical Sensors Fabricated with Graphene Oxide-Coated Commercial Silk. Nanomaterials 2024, 14, 1000. [Google Scholar] [CrossRef]
- Li, C.; Mu, J.; Song, Y.; Chen, S.; Xu, F. Highly Aligned Cellulose/Polypyrrole Composite Nanofibers via Electrospinning and In Situ Polymerization for Anisotropic Flexible Strain Sensor. ACS Appl. Mater. Interfaces 2023, 15, 9820–9829. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Ren, Y.; Zhu, J.; Jia, Y.; Liu, Q.; Yang, X. Highly Sensitive Paper-Based Force Sensors with Natural Micro-Nanostructure Sensitive Element. Nanomaterials 2024, 14, 358. [Google Scholar] [CrossRef]
- Janasz, L.; Borkowski, M.; Blom, P.W.M.; Marszalek, T.; Pisula, W. Organic Semiconductor/Insulator Blends for Elastic Field-Effect Transistors and Sensors. Adv. Funct. Mater. 2022, 32, 2105456. [Google Scholar] [CrossRef]
- Lee, T.; Choi, Y.W.; Lee, G.; Kim, S.M.; Kang, D.; Choi, M. Crack-Based Strain Sensor with Diverse Metal Films by Inserting an Inter-Layer. RSC Adv. 2017, 7, 34810–34815. [Google Scholar] [CrossRef]
- Ramírez-González, F.; García-Salgado, G.; Rosendo, E.; Díaz, T.; Nieto-Caballero, F.; Coyopol, A.; Romano, R.; Luna, A.; Monfil, K.; Gastellou, E. Porous Silicon Gas Sensors: The Role of the Layer Thickness and the Silicon Conductivity. Sensors 2020, 20, 4942. [Google Scholar] [CrossRef]
- Zou, Y.; Tan, P.; Shi, B.; Ouyang, H.; Jiang, D.; Liu, Z.; Li, H.; Yu, M.; Wang, C.; Qu, X.; et al. A Bionic Stretchable Nanogenerator for Underwater Sensing and Energy Harvesting. Nat. Commun. 2019, 10, 2695. [Google Scholar] [CrossRef]
- Sarkar, D.; Das, N.; Saikh, M.M.; Roy, S.; Paul, S.; Hoque, N.A.; Basu, R.; Das, S. Elevating the Performance of Nanoporous Bismuth Selenide Incorporated Arch-Shaped Triboelectric Nanogenerator by Implementing Piezo-Tribo Coupling Effect: Harvesting Biomechanical Energy and Low Scale Energy Sensing Applications. Adv. Compos. Hybrid Mater. 2023, 6, 232. [Google Scholar] [CrossRef]
- Cheng, K.; Zou, L.; Chang, B.; Liu, X.; Shi, H.; Li, T.; Yang, Q.; Guo, Z.; Liu, C.; Shen, C. Mechanically Robust and Conductive Poly(Acrylamide) Nanocomposite Hydrogel by the Synergistic Effect of Vinyl Hybrid Silica Nanoparticle and Polypyrrole for Human Motion Sensing. Adv. Compos. Hybrid Mater. 2022, 5, 2834–2846. [Google Scholar] [CrossRef]
- Joo, H.; Lee, Y.; Kim, J.; Yoo, J.-S.; Yoo, S.; Kim, S.; Arya, A.K.; Kim, S.; Choi, S.H.; Lu, N.; et al. Soft Implantable Drug Delivery Device Integrated Wirelessly with Wearable Devices to Treat Fatal Seizures. Sci. Adv. 2021, 7, eabd4639. [Google Scholar] [CrossRef] [PubMed]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.M.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [PubMed]
- Leber, A.; Cholst, B.; Sandt, J.; Vogel, N.; Kolle, M. Stretchable Thermoplastic Elastomer Optical Fibers for Sensing of Extreme Deformations. Adv. Funct. Mater. 2019, 29, 1802629. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, F.; Hu, Z.; Li, M.; Ouyang, S.; Wu, Y.; Wang, S.; Li, Z.; Qian, J.; Wang, L.; et al. Applications of Cellulose-Based Flexible Self-Healing Sensors for Human Health Monitoring. Nano Energy 2024, 127, 109790. [Google Scholar] [CrossRef]
- Tu, Y.; Yang, Y.; Zheng, Y.; Guo, S.; Shen, J. Polyvinylidene Fluoride Based Piezoelectric Composites with Strong Interfacial Adhesion via Click Chemistry for Self-Powered Flexible Sensors. Small 2024, 20, 2309758. [Google Scholar] [CrossRef]
- Chen, C.; Sayyar, S.; Chung, J.; Chen, G.; Wallace, G.G. 3D-Printed PDMS/Graphene Sensors with Tunable Sensitivity via Temperature-Induced Crosslinking for Pressure Applications. Adv. Electron. Mater. 2024, 2400653. [Google Scholar] [CrossRef]
- Kim, K.; Park, Y.; Hyun, B.G.; Choi, M.; Park, J. Recent Advances in Transparent Electronics with Stretchable Forms. Adv. Mater. 2019, 31, 1804690. [Google Scholar] [CrossRef]
- Chen, X.; Li, H.; Xu, Z.; Lu, L.; Pan, Z.; Mao, Y. Electrospun Nanofiber-Based Bioinspired Artificial Skins for Healthcare Monitoring and Human-Machine Interaction. Biomimetics 2023, 8, 223. [Google Scholar] [CrossRef]
- Zhou, Z.; Tang, W.; Xu, T.; Zhao, W.; Zhang, J.; Bai, C. Flexible Strain Sensors Based on Thermoplastic Polyurethane Fabricated by Electrospinning: A Review. Sensors 2024, 24, 4793. [Google Scholar] [CrossRef]
- Chen, T.; Xie, Y.; Wang, Z.; Lou, J.; Liu, D.; Xu, R.; Cui, Z.; Li, S.; Panahi-Sarmad, M.; Xiao, X. Recent Advances of Flexible Strain Sensors Based on Conductive Fillers and Thermoplastic Polyurethane Matrixes. ACS Appl. Polym. Mater. 2021, 3, 5317–5338. [Google Scholar] [CrossRef]
- Bubniene, U.S.; Ratautaite, V.; Ramanavicius, A.; Bucinskas, V. Conducting Polymers for the Design of Tactile Sensors. Polymers 2022, 14, 2984. [Google Scholar] [CrossRef] [PubMed]
- Shang, J.; Yang, H.; Yao, X.; Chen, H. Structure Driven Piezoresistive Performance Design for Rubbery Composites-Based Sensors and Application Prospect: A Review. Acta Mech. Sin. 2024, 40, 423211. [Google Scholar] [CrossRef]
- Li, G.; Li, C.; Li, G.; Yu, D.; Song, Z.; Wang, H.; Liu, X.; Liu, H.; Liu, W. Development of Conductive Hydrogels for Fabricating Flexible Strain Sensors. Small 2022, 18, 2101518. [Google Scholar] [CrossRef]
- Choi, S.B.; Meena, J.S.; Joo, J.; Kim, J.-W. Autonomous Self-Healing Wearable Flexible Heaters Enabled by Innovative MXene/Polycaprolactone Composite Fibrous Networks and Silver Nanowires. Adv. Compos. Hybrid Mater. 2023, 6, 227. [Google Scholar] [CrossRef]
- Raman, S.; Arunagirinathan, R.S. Silver Nanowires in Stretchable Resistive Strain Sensors. Nanomaterials 2022, 12, 1932. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, Y.; Lu, Y.; Gong, S.; Haick, H.; Cheng, W.; Wang, Y. Tailor-Made Gold Nanomaterials for Applications in Soft Bioelectronics and Optoelectronics. Adv. Mater. 2024, 36, 2405046. [Google Scholar] [CrossRef]
- Sun, H.; Bu, Y.; Liu, H.; Wang, J.; Yang, W.; Li, Q.; Guo, Z.; Liu, C.; Shen, C. Superhydrophobic Conductive Rubber Band with Synergistic Dual Conductive Layer for Wide-Range Sensitive Strain Sensor. Sci. Bull. 2022, 67, 1669–1678. [Google Scholar] [CrossRef]
- Rao, R.K.; Gautham, S.; Sasmal, S. A Comprehensive Review on Carbon Nanotubes Based Smart Nanocomposites Sensors for Various Novel Sensing Applications. Polym. Rev. 2024, 64, 575–638. [Google Scholar] [CrossRef]
- Yu, Q.; Pan, J.; Jiang, Z.; Guo, Z.; Jiang, J. Stretchable Multimodal Textile Sensor Based on Core-Sheath CB/PDMS/MXene Sensing Yarn for Efficiently Distinguishing Mechanical Stimulus. Chem. Eng. J. 2024, 493, 152462. [Google Scholar] [CrossRef]
- Chen, J.; Yu, Q.; Cui, X.; Dong, M.; Zhang, J.; Wang, C.; Fan, J.; Zhu, Y.; Guo, Z. An Overview of Stretchable Strain Sensors from Conductive Polymer Nanocomposites. J. Mater. Chem. C 2019, 7, 11710–11730. [Google Scholar] [CrossRef]
- Kanoun, O.; Bouhamed, A.; Ramalingame, R.; Bautista-Quijano, J.R.; Rajendran, D.; Al-Hamry, A. Review on Conductive Polymer/CNTs Nanocomposites Based Flexible and Stretchable Strain and Pressure Sensors. Sensors 2021, 21, 341. [Google Scholar] [CrossRef]
- Hu, J.; Zhao, T.; Peng, X.; Yang, W.; Ji, X.; Li, T. Growth of Coiled Amorphous Carbon Nanotube Array Forest and Its Electromagnetic Wave Absorbing Properties. Compos. Part. B Eng. 2018, 134, 91–97. [Google Scholar] [CrossRef]
- Leela Mohana Reddy, A.; Jafri, R.I.; Jha, N.; Ramaprabhu, S.; Ajayan, P.M. Carbon Nanocoils for Multi-Functional Energy Applications. J. Mater. Chem. 2011, 21, 16103–16107. [Google Scholar] [CrossRef]
- Deng, C.; Pan, L.; Ma, H.; Cui, R. Electromechanical Vibration of Carbon Nanocoils. Carbon 2015, 81, 758–766. [Google Scholar] [CrossRef]
- Sun, Y.; Lu, X.; Huang, Y.; Wang, G. Microwave-Solvothermal Synthesis of Mesoporous CeO2/CNCs Nanocomposite for Enhanced Room Temperature NO2 Detection. Nanomaterials 2024, 14, 812. [Google Scholar] [CrossRef]
- Chen, Y.; Pan, R.; Wang, Y.; Guo, P.; Liu, X.; Ji, F.; Hu, J.; Yan, X.; Wang, G.P.; Zhang, L.; et al. Carbon Helical Nanorobots Capable of Cell Membrane Penetration for Single Cell Targeted SERS Bio-Sensing and Photothermal Cancer Therapy. Adv. Funct. Mater. 2022, 32, 2200600. [Google Scholar] [CrossRef]
- Sun, Y.; Pan, R.; Chen, Y.; Wang, Y.; Sun, L.; Wang, N.; Ma, X.; Wang, G.P. Efficient Preparation of a Magnetic Helical Carbon Nanomotor for Targeted Anticancer Drug Delivery. ACS Nanosci. Au 2023, 3, 94–102. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Pan, L.; Deng, C.; Wang, P.; Huang, Y.; Nasir, H. A Flexible, Ultra-Sensitive Strain Sensor Based on Carbon Nanocoil Network Fabricated by an Electrophoretic Method. Nanoscale 2017, 9, 9872–9878. [Google Scholar] [CrossRef]
- Yang, S.; Li, C.; Cong, T.; Zhao, Y.; Xu, S.; Wang, P.; Pan, L. Sensitivity-Tunable Strain Sensors Based on Carbon Nanotube@Carbon Nanocoil Hybrid Networks. ACS Appl. Mater. Interfaces 2019, 11, 38160–38168. [Google Scholar] [CrossRef]
- Yang, W.; Li, N.-W.; Zhao, S.; Yuan, Z.; Wang, J.; Du, X.; Wang, B.; Cao, R.; Li, X.; Xu, W.; et al. A Breathable and Screen-Printed Pressure Sensor Based on Nanofiber Membranes for Electronic Skins. Adv. Mater. Technol. 2018, 3, 1700241. [Google Scholar] [CrossRef]
- Wu, Z.; Deng, X.; Yu, X.; Gu, J.; El-Bahy, Z.M.; Mersal, G.A.M.; Zhang, J.; Alhadhrami, A.; Xu, H.; Guo, N.; et al. Electrospun Thermoplastic Polyurethane Membrane Decorated with Carbon Nanotubes: A Platform of Flexible Strain Sensors for Human Motion Monitoring. Polymer 2024, 303, 127120. [Google Scholar] [CrossRef]
- Wang, Q.; Huang, X.; Han, F.; Wu, Y.; Wang, L.; Dai, H.; Song, P.; Tang, L.; Gao, J. Superhydrophobic, Biocompatible and Durable Nanofiber Composite with an Asymmetric Structure for Anisotropic Strain Sensing and Body Motion Detection. Chem. Eng. J. 2022, 450, 137899. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, C.; Pan, L.; Fu, X.; Yin, P.; Zou, H. Electrical Conductivity of Single Polycrystalline-Amorphous Carbon Nanocoils. Carbon 2016, 98, 285–290. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, J.; Huang, H.; Cong, T.; Yang, S.; Chen, H.; Qin, J.; Usman, M.; Fan, Z.; Pan, L. Growth of Carbon Nanocoils by Porous α-Fe2O3/SnO2 Catalyst and Its Buckypaper for High Efficient Adsorption. Nanomicro Lett. 2020, 12, 23. [Google Scholar] [CrossRef]
- Liu, C.-X.; Choi, J.-W. Analyzing Resistance Response of Embedded PDMS and Carbon Nanotubes Composite under Tensile Strain. Microelectron. Eng. 2014, 117, 1–7. [Google Scholar] [CrossRef]
- Nguyen, T.; Khine, M. Advances in Materials for Soft Stretchable Conductors and Their Behavior under Mechanical Deformation. Polymers 2020, 12, 1454. [Google Scholar] [CrossRef] [PubMed]
- Shim, W.; Jeon, S.; Yu, W. Modeling of the Piezoresistive Behavior of Carbon Nanotube/Polymer Composites during Stress Relaxation. Polym. Compos. 2022, 43, 2672–2682. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Wu, S.; Peng, S.; Wang, C.H. Stretchable Strain Sensors Based on PDMS Composites with Cellulose Sponges Containing One- and Two-Dimensional Nanocarbons. Sens. Actuators A Phys. 2018, 279, 90–100. [Google Scholar] [CrossRef]
- Amjadi, M.; Yoon, Y.J.; Park, I. Ultra-Stretchable and Skin-Mountable Strain Sensors Using Carbon Nanotubes–Ecoflex Nanocomposites. Nanotechnology 2015, 26, 375501. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Li, W.; Zhang, Q.; Wang, X.; Lin, G.; Li, W.; Li, Y.; Zhang, K.; Huang, L. Mass-Produced Flexible Strain Sensors Based on Dip-Coating and Water Bath for Human–Computer Interaction. IEEE Sens. J. 2023, 23, 1497–1506. [Google Scholar] [CrossRef]
- Luo, X.; Cheng, H.; Chen, K.; Gu, L.; Liu, S.; Wu, X. Multi-Walled Carbon Nanotube-Enhanced Polyurethane Composite Materials and the Application in High-Performance 3D Printed Flexible Strain Sensors. Compos. Sci. Technol. 2024, 257, 110818. [Google Scholar] [CrossRef]
- Lan, W.; Ding, Q.; Wu, X.; Zhou, T.; Wang, Y.; Gao, S.; Qin, S.; Zhang, W.; Lee, M.; Liu, Y. Highly Sensitive Tubular Strain Sensors: From Nanofiber Arrangements and Conductive Carbon Materials Perspectives. Mater. Today Commun. 2025, 43, 111569. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, H.; Chen, Q.; Yuan, Q.; Zhang, S.; Bao, N.; Qu, J.-P. A High-Sensitive PDMS-Based Sensor with a Wide Sensing Range by Fabricating Refined and Reconstructable Conductive Network. Chem. Eng. J. 2025, 507, 160626. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, D.; Wang, W.; Zhang, H.; Zhou, L. Multi-Functional MXene/Helical Multi-Walled Carbon Nanotubes Flexible Sensor for Tire Pressure Detection and Speech Recognition Enabled by Machine Learning. Chem. Eng. J. 2025, 505, 159157. [Google Scholar] [CrossRef]
- Meng, Y.; Cheng, J.; Zhou, C. Superhydrophobic and Stretchable Carbon Nanotube/Thermoplastic Urethane-Based Strain Sensor for Human Motion Detection. ACS Appl. Nano Mater. 2023, 6, 5871–5878. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, Z.; Fan, F.; Wei, L.; Wu, T.; Wang, D.; Li, Q. Designable High-Performance TPU Foam Strain Sensors towards Human-Machine Interfaces. Compos. Part Appl. Sci. Manuf. 2024, 182, 108169. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Materials | Maximum Strain Range | GF Within 50% Strain | Characteristics | Reference |
|---|---|---|---|---|
| CNTs-CNCs/PDMS | 9–260% | 4.5–70 | [40] | |
| CB/MWCNTs/ TPU | 0–50% | 9–22 | [52] | |
| MWCNTs/TPU | 300% | 5.39 | [53] | |
| PCL/Graphene | 200% | 6.07 | [54] | |
| PDMS/MWCNTs | 200% | 30 | [55] | |
| MXene/CNCs | 77% | 58 | [56] | |
| CNT/F-TPU | 550% | 1.6 | Superhydrophobic | [57] |
| CNTs/rGO TPU | 100% | 21 | Breathable | [58] |
| CNCs/TPU | 40% | 34 | Hydrophobic and breathable | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Huang, Y.; Lu, X.; Song, H.; Wang, G. Preparation and Application of Hydrophobic and Breathable Carbon Nanocoils/Thermoplastic Polyurethane Flexible Strain Sensors. Nanomaterials 2025, 15, 457. https://doi.org/10.3390/nano15060457
Sun Y, Huang Y, Lu X, Song H, Wang G. Preparation and Application of Hydrophobic and Breathable Carbon Nanocoils/Thermoplastic Polyurethane Flexible Strain Sensors. Nanomaterials. 2025; 15(6):457. https://doi.org/10.3390/nano15060457
Chicago/Turabian StyleSun, Yanming, Yanchen Huang, Xiaoying Lu, Hao Song, and Guoping Wang. 2025. "Preparation and Application of Hydrophobic and Breathable Carbon Nanocoils/Thermoplastic Polyurethane Flexible Strain Sensors" Nanomaterials 15, no. 6: 457. https://doi.org/10.3390/nano15060457
APA StyleSun, Y., Huang, Y., Lu, X., Song, H., & Wang, G. (2025). Preparation and Application of Hydrophobic and Breathable Carbon Nanocoils/Thermoplastic Polyurethane Flexible Strain Sensors. Nanomaterials, 15(6), 457. https://doi.org/10.3390/nano15060457