

Soft, Stretchable, High-Sensitivity, Multi-Walled Carbon Nanotube-Based Strain Sensor for Joint Healthcare


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
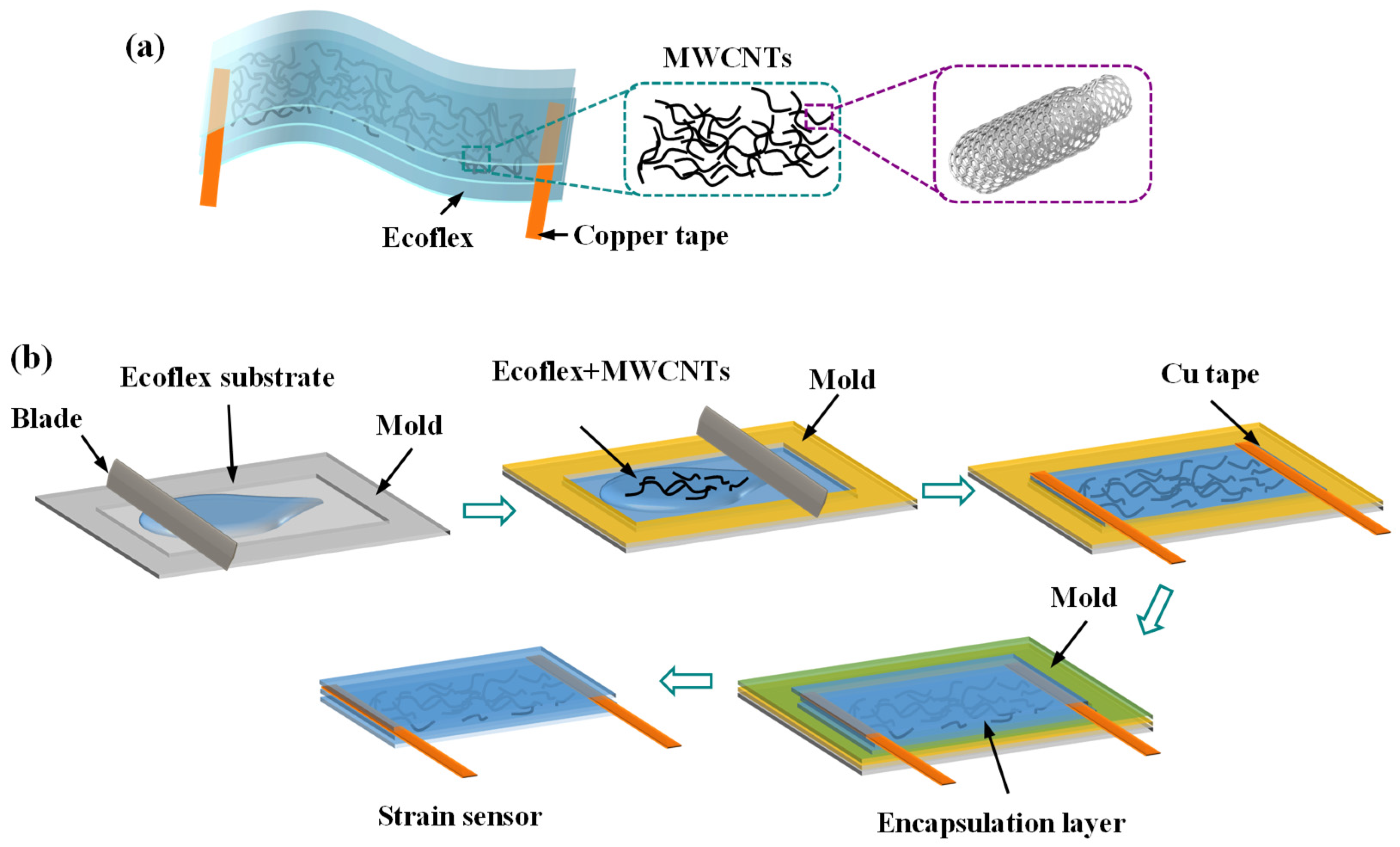
2.2. Fabrication of the Sensor
2.3. Characterization
2.4. Measurement of the Electromechanical Properties
3. Results and Discussion
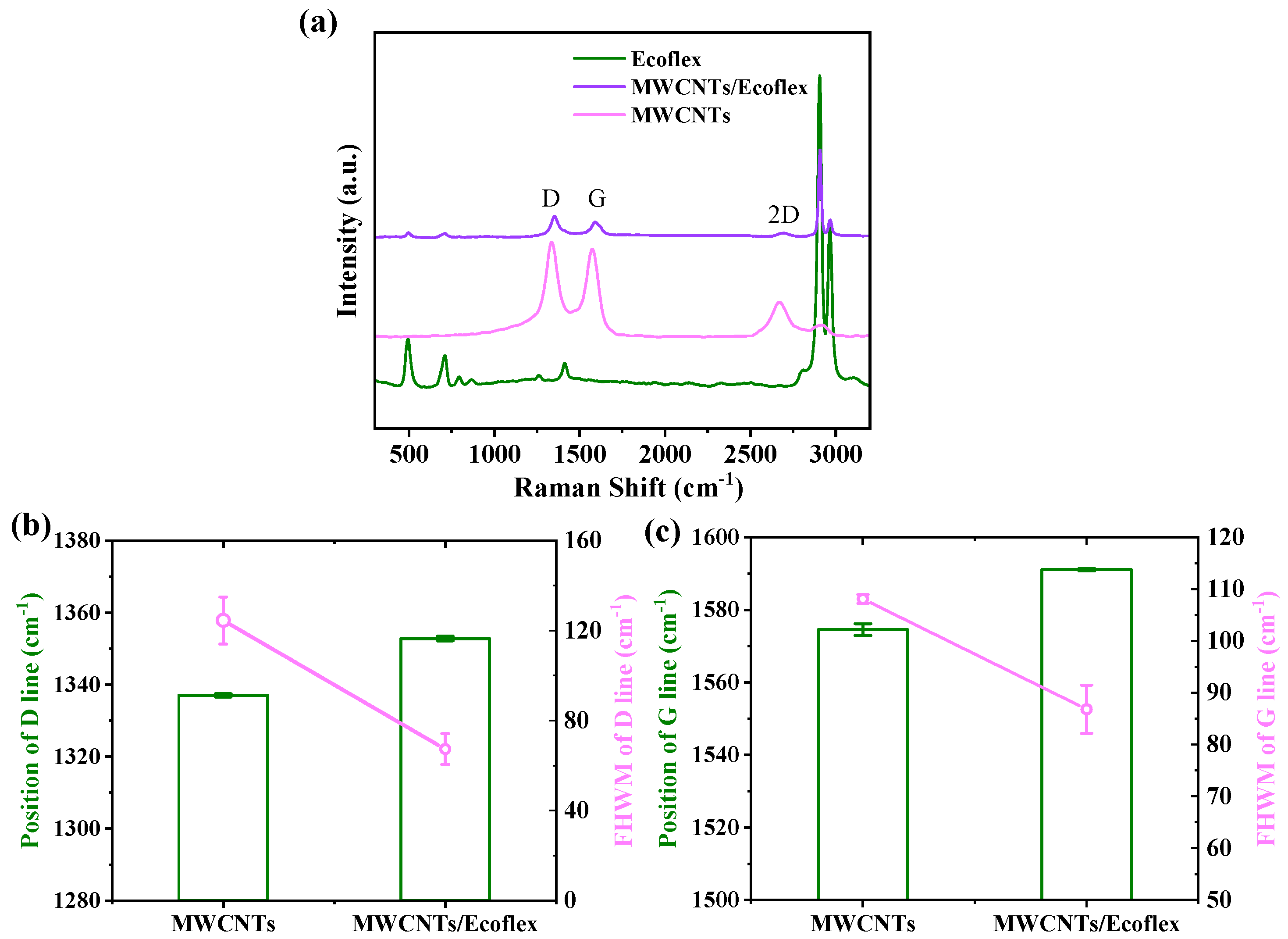
3.1. Characterization of the Sensing Layer
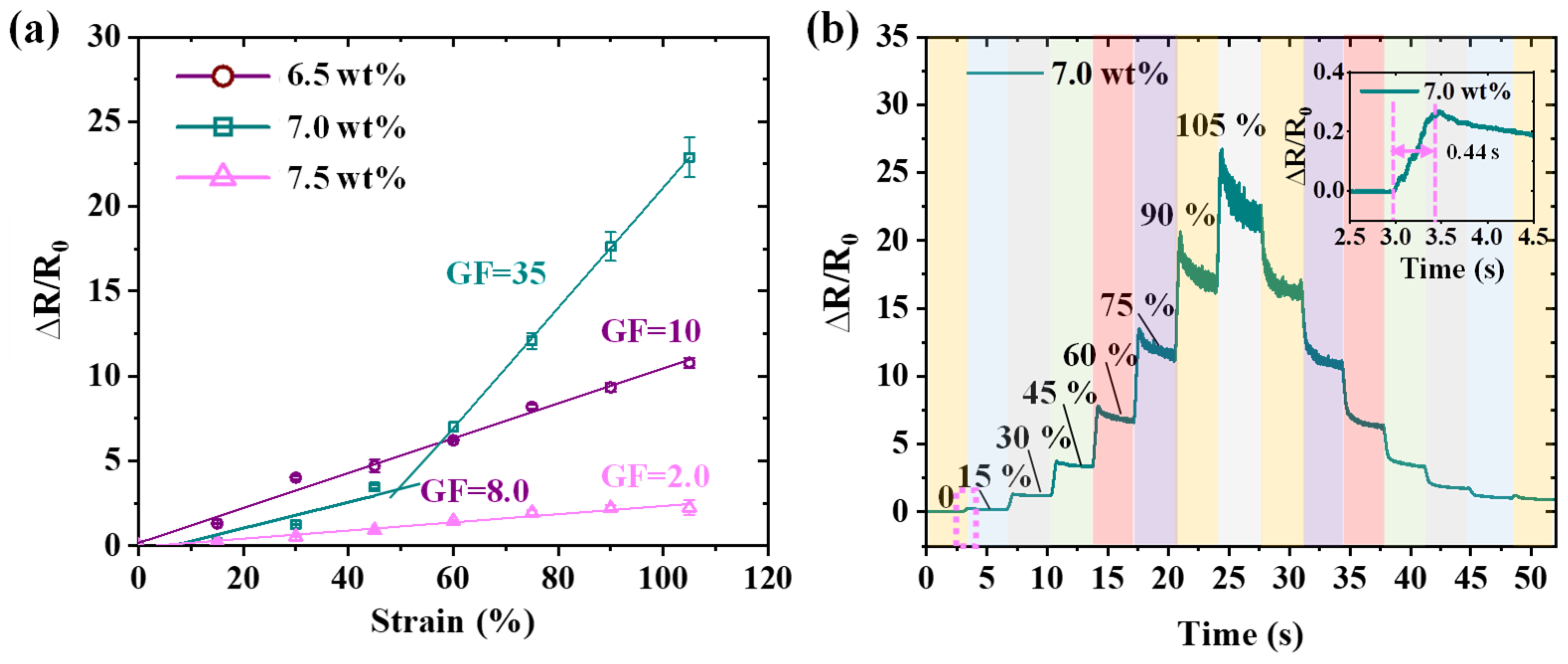
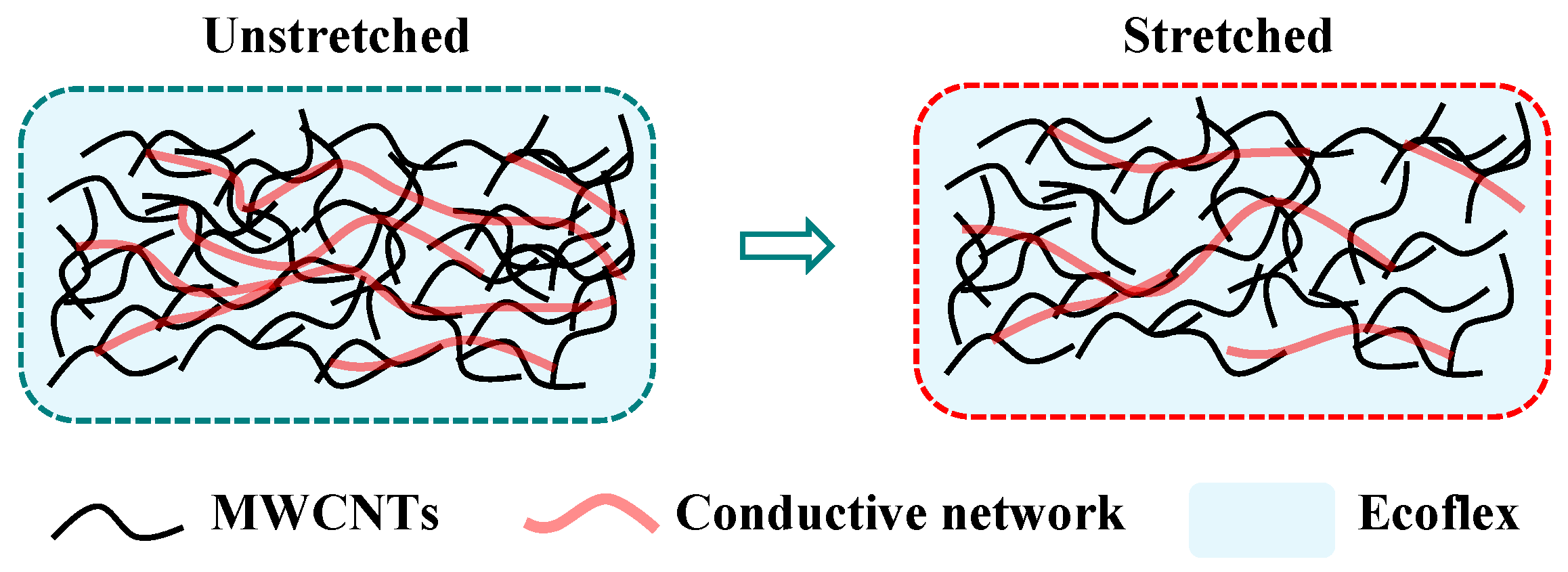
3.2. Electromechanical Performances and Mechanism of the Sensor
3.3. Applications of the Sensor for Human Motion Monitoring
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, M.; Cui, S.; Wang, Z.; Luo, H.; Yang, H.; Ouyang, X.; Xu, K. A Laser-Engraved Wearable Gait Recognition Sensor System for Exoskeleton Robots. Microsyst. Nanoeng. 2024, 10, 50. [Google Scholar] [CrossRef]
- Chen, B.; Tan, J.; Shi, C.; Zi, B. Development of Knee Exoskeleton for Capturing Energy from Human Knee Motion. Robotica 2023, 41, 3195–3210. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef]
- Ning, Y.; Sang, L.; Wang, H.; Wang, Q.; Vladareanu, L.; Niu, J. Upper Limb Exoskeleton Rehabilitation Robot Inverse Kinematics Modeling and Solution Method Based on Multi-Objective Optimization. Sci. Rep. 2024, 14, 25476. [Google Scholar] [CrossRef] [PubMed]
- Xia, H.; Zhang, Y.; Rajabi, N.; Taleb, F.; Yang, Q.; Kragic, D.; Li, Z. Shaping High-Performance Wearable Robots for Human Motor and Sensory Reconstruction and Enhancement. Nat. Commun. 2024, 15, 1760. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, Z.; Chen, T.; Lee, C. Low Cost Exoskeleton Manipulator Using Bidirectional Triboelectric Sensors Enhanced Multiple Degree of Freedom Sensory System. Nat. Commun. 2021, 12, 2692. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Heo, U.; Jayashankar, D.K.; Agno, K.C.; Kim, Y.; Kim, C.Y.; Oh, Y.; Byun, S.H.; Choi, B.; et al. Skin Preparation–Free, Stretchable Microneedle Adhesive Patches for Reliable Electrophysiological Sensing and Exoskeleton Robot Control. Sci. Adv. 2024, 10, eadk5260. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Zhou, Y.; Wu, X.; Yin, M.; Yin, L.; Qu, S.; Zhang, F.; Li, K.; Huang, Y.A. Flexible Strain Sensors with Ultra-High Sensitivity and Wide Range Enabled by Crack-Modulated Electrical Pathways. Nano-Micro Lett. 2025, 17, 64. [Google Scholar] [CrossRef]
- Zhao, Y.; Ren, M.; Shang, Y.; Li, J.; Wang, S.; Zhai, W.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Ultra-Sensitive and Durable Strain Sensor with Sandwich Structure and Excellent Anti-Interference Ability for Wearable Electronic Skins. Compos. Sci. Technol. 2020, 200, 108448. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, B.; Zheng, G.; Liu, X.; Li, T.; Yan, C.; Cheng, C.; Dai, K.; Liu, C.; Shen, C.; et al. Continuously Prepared Highly Conductive and Stretchable SWNT/MWNT Synergistically Composited Electrospun Thermoplastic Polyurethane Yarns for Wearable Sensing. J. Mater. Chem. C 2018, 6, 2258–2269. [Google Scholar] [CrossRef]
- Dong, J.; Hou, J.; Peng, Y.; Zhang, Y.; Liu, H.; Long, J.; Park, S.; Liu, T.; Huang, Y. Breathable and Stretchable Epidermal Electronics for Health Management: Recent Advances and Challenges. Adv. Mater. 2024, 36, 2409071. [Google Scholar] [CrossRef]
- Nie, M.; Chen, P.; Wen, L.; Fan, J.; Zhang, Q.; Yin, K.; Dou, G. Wearable Recognition System for Complex Motions Based on Hybrid Deep-Learning-Enhanced Strain Sensors. Adv. Intell. Syst. 2023, 5, 2300222. [Google Scholar] [CrossRef]
- Qin, J.; Yin, L.J.; Hao, Y.N.; Zhong, S.L.; Zhang, D.L.; Bi, K.; Zhang, Y.X.; Zhao, Y.; Dang, Z.M. Flexible and Stretchable Capacitive Sensors with Different Microstructures. Adv. Mater. 2021, 33, 2008267. [Google Scholar] [CrossRef]
- Wu, S.; Peng, S.; Yu, Y.; Wang, C.H. Strategies for Designing Stretchable Strain Sensors and Conductors. Adv. Mater. Technol. 2020, 5, 1900908. [Google Scholar] [CrossRef]
- Xu, L.; Zhong, S.; Yue, T.; Zhang, Z.; Lu, X.; Lin, Y.; Li, L.; Tian, Y.; Jin, T.; Zhang, Q.; et al. AIoT-Enhanced Health Management System Using Soft and Stretchable Triboelectric Sensors for Human Behavior Monitoring. EcoMat 2024, 6, e12448. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Li, Z.; Wang, Y.; Dai, K.; Zheng, G.; Liu, C.; Shen, C. The Effect of Filler Dimensionality on the Electromechanical Performance of Polydimethylsiloxane Based Conductive Nanocomposites for Flexible Strain Sensors. Compos. Sci. Technol. 2017, 139, 64–73. [Google Scholar] [CrossRef]
- Mai, H.; Mutlu, R.; Tawk, C.; Alici, G.; Sencadas, V. Ultra-Stretchable MWCNT–Ecoflex Piezoresistive Sensors for Human Motion Detection Applications. Compos. Sci. Technol. 2019, 173, 118–124. [Google Scholar] [CrossRef]
- Xiang, Q.; Zhao, G.; Tang, T.; Zhang, H.; Liu, Z.; Zhang, X.; Zhao, Y.; Tan, H. All-Carbon Piezoresistive Sensor: Enhanced Sensitivity and Wide Linear Range via Multiscale Design for Wearable Applications. Adv. Funct. Mater. 2024, 2418706. [Google Scholar] [CrossRef]
- Chen, X.; Luo, Y.; Chen, Y.; Li, S.; Deng, S.; Wang, B.; Zhang, Q.; Li, X.; Li, X.; Wang, C.; et al. Biomimetic Contact Behavior Inspired Tactile Sensing Array with Programmable Microdomes Pattern by Scalable and Consistent Fabrication. Adv. Sci. 2024, 11, 2408082. [Google Scholar] [CrossRef]
- Jang, H.; Sel, K.; Kim, E.; Kim, S.; Yang, X.; Kang, S.; Ha, K.H.; Wang, R.; Rao, Y.; Jafari, R.; et al. Graphene E-Tattoos for Unobstructive Ambulatory Electrodermal Activity Sensing on the Palm Enabled by Heterogeneous Serpentine Ribbons. Nat. Commun. 2022, 13, 6604. [Google Scholar] [CrossRef]
- Zheng, Q.; Lee, J.-h.; Shen, X.; Chen, X.; Kim, J.K. Graphene-Based Wearable Piezoresistive Physical Sensors. Mater. Today 2020, 36, 158–179. [Google Scholar] [CrossRef]
- Ma, Z.; Khoo, B.L. Recent Advances in Laser-Induced-Graphene-Based Soft Skin Electronics for Intelligent Healthcare. Soft Sci. 2024, 4, 26. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, H.; Yan, B.; Lin, P.; Wu, D.; Shi, Z.; Chen, X.; Tian, Y.; Li, X. Nanoarchitectonics with MWCNT and Ecoflex Film for Flexible Strain Sensors: Wide Linear Range for Wearable Applications and Monitoring of Pressure Distribution. Appl. Phys. A Mater. Sci. Process. 2022, 128, 885. [Google Scholar] [CrossRef]
- Yan, B.; Ding, H.; Zhang, Y.; Lin, P.; Wu, D.; Shi, Z.; Chen, X.; Tian, Y.; Li, X. Skin-Attachable and Flexible MWCNT Grid/Ecoflex Strain Sensors with Fast Equilibrium of Response for Detection of Sound Vibrations and Human Motions. J. Mater. Sci. Mater. Electron. 2021, 32, 26439–26448. [Google Scholar] [CrossRef]
- Demidenko, N.A.; Kuksin, A.V.; Davydova, E.S.; Zaborova, V.A.; Ichkitidze, L.P.; Bordovsky, S.P.; Gerasimenko, A.Y. Studying of a Sensitive Material Based on Ecoflex and CNTs for Flexible Strain Sensors. J. Phys. Conf. Ser. 2021, 2086, 012010. [Google Scholar] [CrossRef]
- Kim, K.; Hong, J.H.; Bae, K.; Lee, K.; Lee, D.J.; Park, J.; Zhang, H.; Sang, M.; Ju, J.E.; Cho, Y.U.; et al. Extremely Durable Electrical Impedance Tomography-Based Soft and Ultrathin Wearable e-Skin for Three-Dimensional Tactile Interfaces. Sci. Adv. 2024, 10, eadr1099. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Li, Z.; Yi, Y.; Li, L.; Zhai, H.; Lu, Z.; Jin, L.; Lu, J.R.; Xie, S.Q.; Zheng, Z.; et al. Flexible Strain Sensing Percolation Networks towards Complicated Wearable Microclimate and Multi-Direction Mechanical Inputs. Nano Energy 2022, 99, 107444. [Google Scholar] [CrossRef]
- Amjadi, M.; Yoon, Y.J.; Park, I. Ultra-Stretchable and Skin-Mountable Strain Sensors Using Carbon Nanotubes-Ecoflex Nanocomposites. Nanotechnology 2015, 26, 375501. [Google Scholar] [CrossRef]
- Szroeder, P.; Ziółkowski, P.; Sahalianov, I.; Madajski, P.; Trzcinski, M. The Hydroxylated Carbon Nanotubes as the Hole Oxidation System in Electrocatalysis. Materials 2024, 17, 3532. [Google Scholar] [CrossRef]
- Pradhan, G.B.; Jeong, S.; Sharma, S.; Lim, S.J.; Shrestha, K.; Lee, Y.Y.; Park, J.Y. A Breathable and Strain-Insensitive Multi-Layered E-Skin Patch for Digital Healthcare Wearables. Adv. Funct. Mater. 2024, 34, 2407978. [Google Scholar] [CrossRef]
- Zhang, S.; Wen, L.; Wang, H.; Zhu, K.; Zhang, M. Vertical CNT-Ecoflex Nanofins for Highly Linear Broad-Range-Detection Wearable Strain Sensors. J. Mater. Chem. C 2018, 6, 5132–5139. [Google Scholar] [CrossRef]
- Kaczor, D.; Bajer, K.; Raszkowska-Kaczor, A.; Domek, G.; Madajski, P.; Szroeder, P. The Influence of Multiple Extrusions on the Properties of High Filled Polylactide/Multiwall Carbon Nanotube Composites. Materials 2022, 15, 8958. [Google Scholar] [CrossRef]
- Nie, Z.; Kwak, J.W.; Han, M.; Rogers, J.A. Mechanically Active Materials and Devices for Bio-Interfaced Pressure Sensors—A Review. Adv. Mater. 2023, 36, 2205609. [Google Scholar] [CrossRef] [PubMed]
- Hu, B.; Xu, D.; Shao, Y.; Nie, Z.; Liu, P.; Li, J.; Zhou, L.; Wang, P.; Huang, N.; Liu, J.; et al. Ultrathin Crystalline Silicon-Based Omnidirectional Strain Gauges for Implantable/Wearable Characterization of Soft Tissue Biomechanics. Sci. Adv. 2024, 10, eadp8804. [Google Scholar] [CrossRef]
- Bai, Y.; Yin, L.; Hou, C.; Zhou, Y.; Zhang, F.; Xu, Z.; Li, K.; Huang, Y.A. Response Regulation for Epidermal Fabric Strain Sensors via Mechanical Strategy. Adv. Funct. Mater. 2023, 33, 2214119. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire-Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.; Fang, X.; Fang, Z.; Zhao, L.; Tian, B.; Verma, P.; Maeda, R.; Jiang, Z. An Ultrasensitive and Stretchable Strain Sensor Based on a Microcrack Structure for Motion Monitoring. Microsyst. Nanoeng. 2022, 8, 111. [Google Scholar] [CrossRef] [PubMed]
- Cai, Y.; Shen, J.; Dai, Z.; Zang, X.; Dong, Q.; Guan, G.; Li, L.J.; Huang, W.; Dong, X. Extraordinarily Stretchable All-Carbon Collaborative Nanoarchitectures for Epidermal Sensors. Adv. Mater. 2017, 29, 1606411. [Google Scholar] [CrossRef]
- He, Y.; Lu, X.; Wu, D.; Zhou, M.; He, G.; Zhang, J.; Zhang, L.; Liu, H.; Liu, C. CNT/PDMS Conductive Foam-Based Piezoresistive Sensors with Low Detection Limits, Excellent Durability, and Multifunctional Sensing Capability. Sens. Actuators A Phys. 2023, 358, 114408. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Hu, X.; Chen, Y.; Ma, Y.; Zhao, F.; Guo, S. Soft, Stretchable, High-Sensitivity, Multi-Walled Carbon Nanotube-Based Strain Sensor for Joint Healthcare. Nanomaterials 2025, 15, 332. https://doi.org/10.3390/nano15050332
Guo Z, Hu X, Chen Y, Ma Y, Zhao F, Guo S. Soft, Stretchable, High-Sensitivity, Multi-Walled Carbon Nanotube-Based Strain Sensor for Joint Healthcare. Nanomaterials. 2025; 15(5):332. https://doi.org/10.3390/nano15050332
Chicago/Turabian StyleGuo, Zechen, Xiaohe Hu, Yaqiong Chen, Yanwei Ma, Fuqun Zhao, and Sheng Guo. 2025. "Soft, Stretchable, High-Sensitivity, Multi-Walled Carbon Nanotube-Based Strain Sensor for Joint Healthcare" Nanomaterials 15, no. 5: 332. https://doi.org/10.3390/nano15050332
APA StyleGuo, Z., Hu, X., Chen, Y., Ma, Y., Zhao, F., & Guo, S. (2025). Soft, Stretchable, High-Sensitivity, Multi-Walled Carbon Nanotube-Based Strain Sensor for Joint Healthcare. Nanomaterials, 15(5), 332. https://doi.org/10.3390/nano15050332