
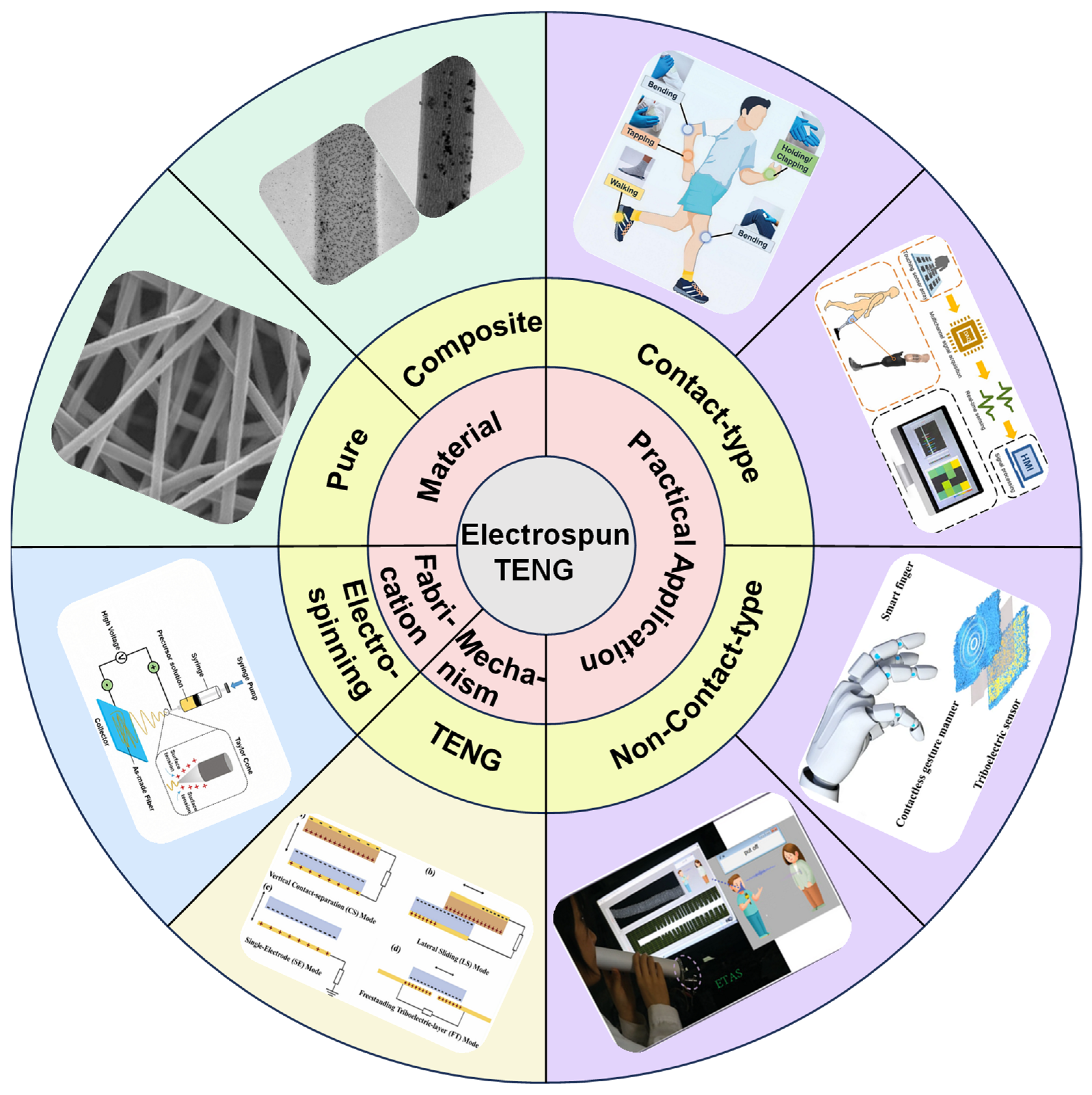
Recent Advances in Electrospun Nanofiber-Based Self-Powered Triboelectric Sensors for Contact and Non-Contact Sensing

 ,
, 


Abstract
1. Introduction
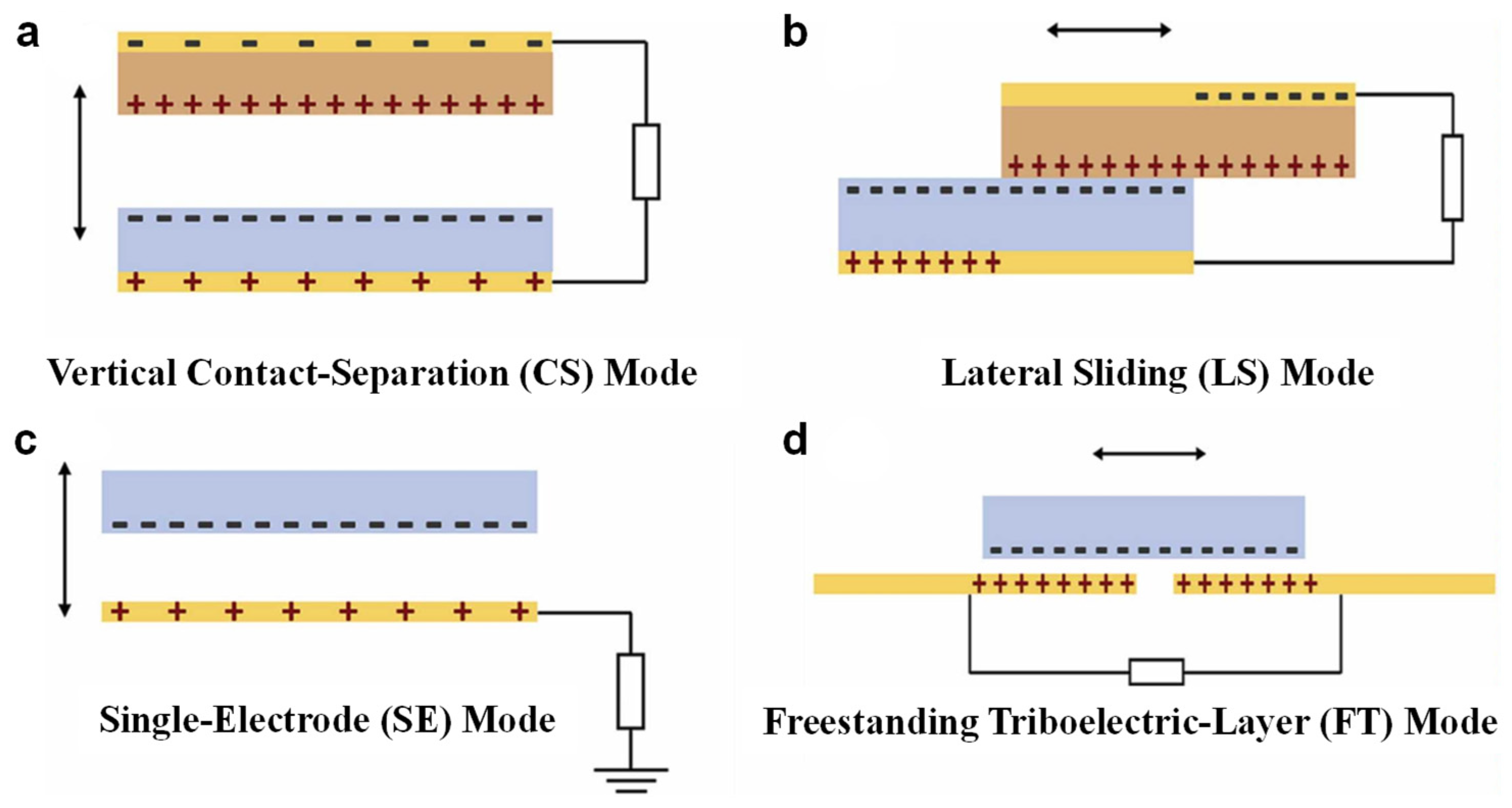
2. Basic Principles and Working Mode of TENGs
2.1. Vertical Contact–Separation Mode
2.2. Lateral Sliding Mode
2.3. Single-Electrode Mode
2.4. Freestanding Triboelectric-Layer Mode
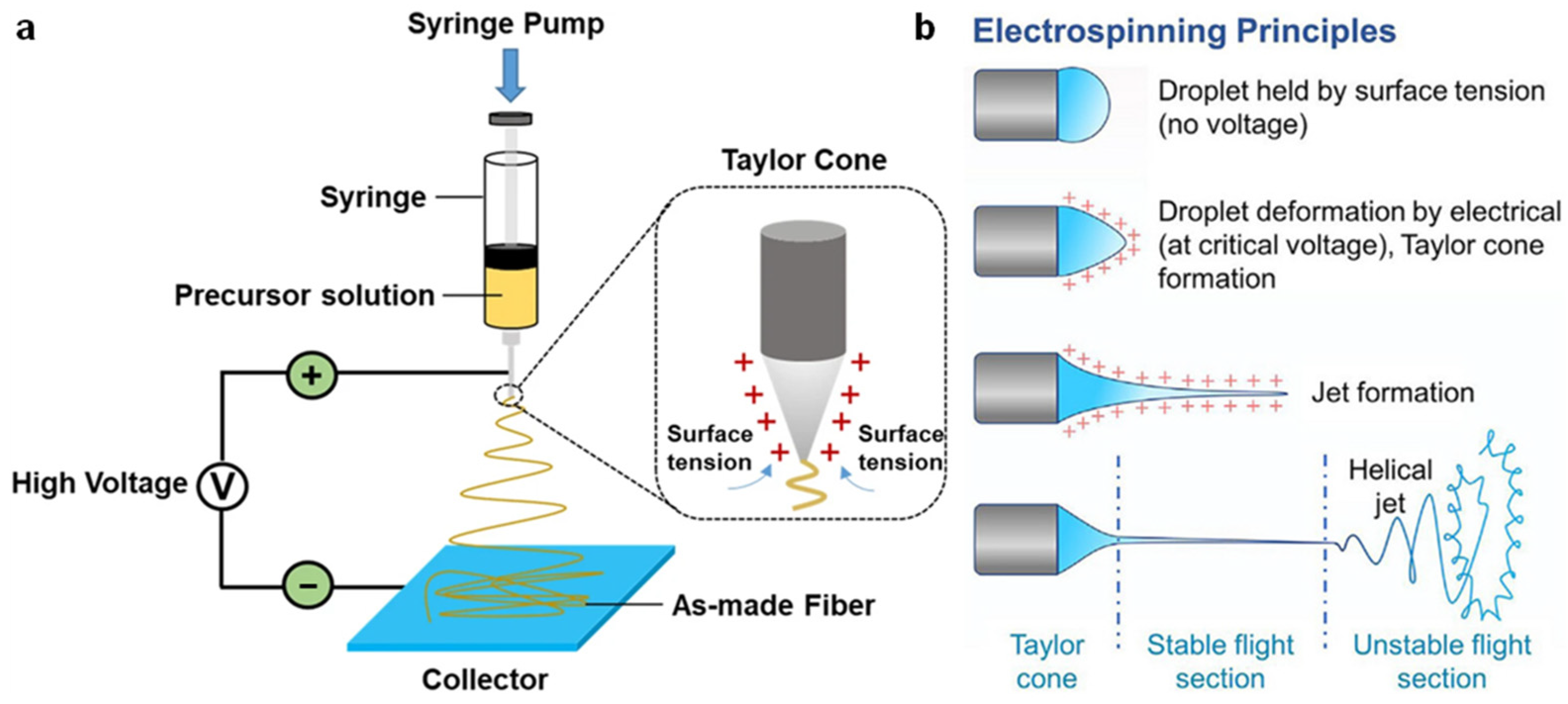
3. Electrospinning Techniques and Materials
3.1. Methods and Mechanisms of Electrospinning
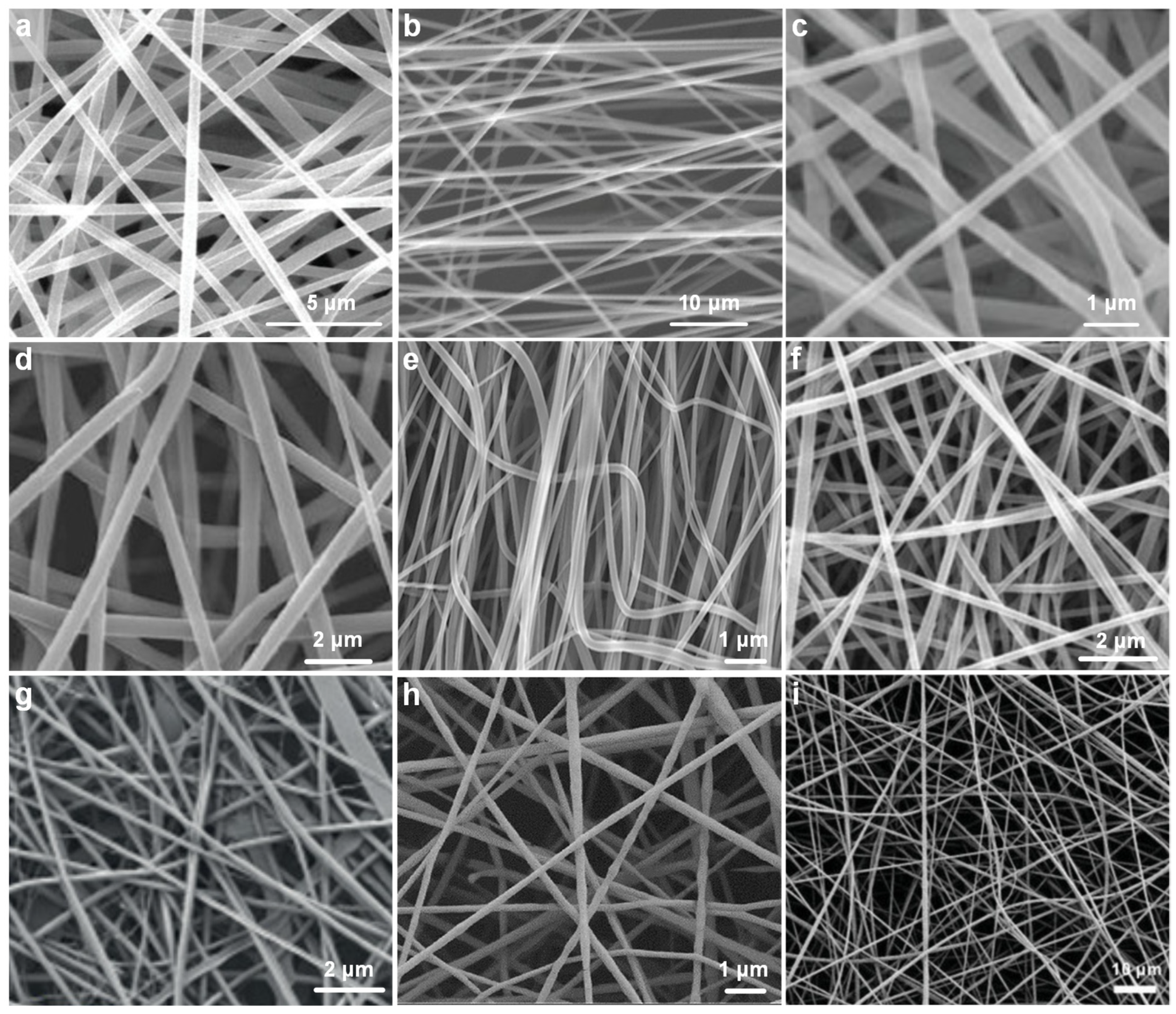
3.2. Electrospun Materials
3.2.1. Pure Polymer Nanofibers
3.2.2. Composite Polymer Nanofibers
4. Practical Application of Self-Powered Sensors Based on TENGs
4.1. Contact-Type Applications
4.1.1. Contact-Based Human–Machine Interaction
4.1.2. Contact-Based Health and Motion Monitoring
4.2. Non-Contact-Type Applications
4.2.1. Non-Contact Human–Machine Interaction
4.2.2. Non-Contact Voice Recognition
5. Conclusions and Future Perspectives
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aaryashree; Sahoo, S.; Walke, P.; Nayak, S.K.; Rout, C.S.; Late, D.J. Recent Developments in Self-Powered Smart Chemical Sensors for Wearable Electronics. Nano Res. 2021, 14, 3669–3689. [Google Scholar] [CrossRef]
- Ahmed, A.; Hassan, I.; El-Kady, M.F.; Radhi, A.; Jeong, C.K.; Selvaganapathy, P.R.; Zu, J.; Ren, S.; Wang, Q.; Kaner, R.B. Integrated Triboelectric Nanogenerators in the Era of the Internet of Things. Adv. Sci. 2019, 6, 1802230. [Google Scholar] [CrossRef]
- Cao, X.; Jie, Y.; Wang, N.; Wang, Z.L. Triboelectric Nanogenerators Driven Self-Powered Electrochemical Processes for Energy and Environmental Science. Adv. Energy Mater. 2016, 6, 1600665. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Xiong, Y.; Sun, J.; Zhu, X.; Sun, Q.; Wang, Z.L. Piezoelectric Nanogenerators Derived Self-Powered Sensors for Multifunctional Applications and Artificial Intelligence. Adv. Funct. Mater. 2021, 31, 2102983. [Google Scholar] [CrossRef]
- Jiang, D.; Shi, B.; Ouyang, H.; Fan, Y.; Wang, Z.L.; Li, Z. Emerging Implantable Energy Harvesters and Self-Powered Implantable Medical Electronics. ACS Nano 2020, 14, 6436–6448. [Google Scholar] [CrossRef]
- Li, Y.; Chen, S.; Yan, H.; Jiang, H.; Luo, J.; Zhang, C.; Pang, Y.; Tan, Y. Biodegradable, Transparent, and Antibacterial Alginate-Based Triboelectric Nanogenerator for Energy Harvesting and Tactile Sensing. Chem. Eng. J. 2023, 468, 143572. [Google Scholar] [CrossRef]
- Li, Y.; Deng, H.; Wu, H.; Luo, Y.; Deng, Y.; Yuan, H.; Cui, Z.; Tang, J.; Xiong, J.; Zhang, X.; et al. Rotary Wind-Driven Triboelectric Nanogenerator for Self-Powered Airflow Temperature Monitoring of Industrial Equipment. Adv. Sci. 2024, 11, e2307382. [Google Scholar] [CrossRef]
- Li, Y.; Luo, Y.; Deng, H.; Shi, S.; Tian, S.; Wu, H.; Tang, J.; Zhang, C.; Zhang, X.; Zha, J.-W.; et al. Advanced Dielectric Materials for Triboelectric Nanogenerators: Principles, Methods, and Applications. Adv. Mater. 2024, 36, e2314380. [Google Scholar] [CrossRef]
- Liu, Z.; Li, H.; Shi, B.; Fan, Y.; Wang, Z.L.; Li, Z. Wearable and Implantable Triboelectric Nanogenerators. Adv. Funct. Mater. 2019, 29, 1808820. [Google Scholar] [CrossRef]
- Ouyang, H.; Liu, Z.; Li, N.; Shi, B.; Zou, Y.; Xie, F.; Ma, Y.; Li, Z.; Li, H.; Zheng, Q.; et al. Symbiotic Cardiac Pacemaker. Nat. Commun. 2019, 10, 1–10. [Google Scholar] [CrossRef]
- Panda, S.; Hajra, S.; Oh, Y.; Oh, W.; Lee, J.; Shin, H.; Vivekananthan, V.; Yang, Y.; Mishra, Y.K.; Kim, H.J. Hybrid Nanogenerators for Ocean Energy Harvesting: Mechanisms, Designs, and Applications. Small 2023, 19, e2300847. [Google Scholar] [CrossRef] [PubMed]
- Pu, X.; Zhang, C.; Wang, Z.L. Triboelectric Nanogenerators as Wearable Power Sources and Self-Powered Sensors. Natl. Sci. Rev. 2023, 10, nwac170. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Faruk, O.; Islam, M.R.; Yasmin, T.; Zaman, K.; Wang, Z.L. Recent Advances in Metal-Organic Framework-Based Self-Powered Sensors: A Promising Energy Harvesting Technology. Coord. Chem. Rev. 2024, 507, 215741. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, D.; Tang, M.; Zhang, H.; Chen, F.; Wang, T.; Li, Z.; Zhao, P. Rotating Triboelectric-Electromagnetic Nanogenerator Driven by Tires for Self-Powered MXene-Based Flexible Wearable Electronics. Chem. Eng. J. 2022, 446, 136914. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, D.; Tang, M.; Zhang, H.; Sun, T.; Yang, C.; Mao, R.; Li, K.; Wang, J. Ethylene Chlorotrifluoroethylene/Hydrogel-Based Liquid-Solid Triboelectric Nanogenerator Driven Self-Powered MXene-Based Sensor System for Marine Environmental Monitoring. Nano Energy 2022, 100, 107509. [Google Scholar] [CrossRef]
- Wang, S.; Lin, L.; Wang, Z.L. Triboelectric Nanogenerators as Self-Powered Active Sensors. Nano Energy 2015, 11, 436–462. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s Displacement Current for Energy and Sensors: The Origin of Nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in Triboelectric Nanogenerators as a New Energy Technology and Self-Powered Sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Wu, Z.; Cheng, T.; Wang, Z.L. Self-Powered Sensors and Systems Based on Nanogenerators. Sensors 2020, 20, 2925. [Google Scholar] [CrossRef] [PubMed]
- Xuan, N.; Song, C.; Cheng, G.; Du, Z. Advanced Triboelectric Nanogenerator Based Self-Powered Electrochemical System. Chem. Eng. J. 2024, 481, 148640. [Google Scholar] [CrossRef]
- Yao, G.; Xu, L.; Cheng, X.; Li, Y.; Huang, X.; Guo, W.; Liu, S.; Wang, Z.L.; Wu, H. Bioinspired Triboelectric Nanogenerators as Self-Powered Electronic Skin for Robotic Tactile Sensing. Adv. Funct. Mater. 2020, 30, 1907312. [Google Scholar] [CrossRef]
- Zhang, C.; Hao, Y.; Yang, J.; Su, W.; Zhang, H.; Wang, J.; Wang, Z.L.; Li, X. Recent Advances in Triboelectric Nanogenerators for Marine Exploitation. Adv. Energy Mater. 2023, 13, 2300387. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, D.; Xu, Z.; Zhang, X.; Yang, Y.; Guo, J.; Zhang, B.; Zhao, W. Diversiform Sensors and Sensing Systems Driven by Triboelectric and Piezoelectric Nanogenerators. Coord. Chem. Rev. 2021, 427, 213597. [Google Scholar] [CrossRef]
- Huang, Y.; Xiao, T.; Chen, S.; Xie, Z.; Zheng, J.; Zhu, J.; Su, Y.; Chen, W.; Liu, K.; Tang, M.; et al. All-Optical Controlled-NOT Logic Gate Achieving Directional Asymmetric Transmission Based on Metasurface Doublet. Opto Electron. Adv. 2023, 6, 220073. [Google Scholar] [CrossRef]
- Kim, M.P.; Um, D.-S.; Shin, Y.-E.; Ko, H. High-Performance Triboelectric Devices via Dielectric Polarization: A Review. Nanoscale Res. Lett. 2021, 16, 35. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, N.; Tang, Y.; Wang, M.; Chao, M.; Liang, E. A Paper Triboelectric Nanogenerator for Self-Powered Electronic Systems. Nanoscale 2017, 9, 14499–14505. [Google Scholar] [CrossRef]
- Li, J.; Cai, J.; Yu, J.; Li, Z.; Ding, B. The Rising of Fiber Constructed Piezo/Triboelectric Nanogenerators: From Material Selections, Fabrication Techniques to Emerging Applications. Adv. Funct. Mater. 2023, 33, 2303249. [Google Scholar] [CrossRef]
- Liang, X.; Liu, S.; Lin, S.; Yang, H.; Jiang, T.; Wang, Z.L. Liquid-Solid Triboelectric Nanogenerator Arrays Based on Dynamic Electric-Double-Layer for Harvesting Water Wave Energy. Adv. Energy Mater. 2023, 13, 2300571. [Google Scholar] [CrossRef]
- Baburaj, A.; Kumar, S.K.N.; Aliyana, A.K.; Banakar, M.; Bairagi, S.; Stylios, G. Factors Affecting the Performance of Flexible Triboelectric Nanogenerators (F-Tengs) and Their Sensing Capabilities: A Comprehensive Review. Nano Energy 2023, 118, 108983. [Google Scholar] [CrossRef]
- Lin, Z.; Zhang, B.; Guo, H.; Wu, Z.; Zou, H.; Yang, J.; Wang, Z.L. Super-Robust and Frequency-Multiplied Triboelectric Nanogenerator for Efficient Harvesting Water and Wind Energy. Nano Energy 2019, 64, 103908. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, Y.; Shi, Y.; Tao, X.; He, H.; Chen, F.; Huang, Z.-X.; Wang, Z.L.; Chen, X.; Qu, J.-P. Fabrication of Triboelectric Polymer Films via Repeated Rheological Forging for Ultrahigh Surface Charge Density. Nat. Commun. 2022, 13, 1–10. [Google Scholar] [CrossRef]
- Zhang, W.; Lou, Q.; Sun, J.; Liao, J.; Zheng, G.; Jiao, F.; Chen, W.; Li, X.; Meng, J.; Shan, C.-X.; et al. Carbon Nanodot-Based Flexible and Self-Powered White Displays. Nano Res. 2025, 18, 94907117. [Google Scholar] [CrossRef]
- Luo, J.; Gao, W.; Wang, Z.L. The Triboelectric Nanogenerator as an Innovative Technology toward Intelligent Sports. Adv. Mater. 2021, 33, 2004178. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.L. Recent Progress of Triboelectric Nanogenerators: From Fundamental Theory to Practical Applications. Ecomat 2020, 2, e12059. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical Systems of Triboelectric Nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Ryu, H.; Yoon, H.-J.; Kim, S.-W. Hybrid Energy Harvesters: Toward Sustainable Energy Harvesting. Adv. Mater. 2019, 31, e1802898. [Google Scholar] [CrossRef]
- Shao, Z.; Chen, J.; Xie, Q.; Mi, L. Functional Metal/Covalent Organic Framework Materials for Triboelectric Nanogenerator. Coord. Chem. Rev. 2023, 486, 215118. [Google Scholar] [CrossRef]
- Shanbedi, M.; Ardebili, H.; Karim, A. Polymer-Based Triboelectric Nanogenerators: Materials, Characterization, and Applications. Prog. Polym. Sci. 2023, 144, 101723. [Google Scholar] [CrossRef]
- Wang, Z.L. From Contact Electrification to Triboelectric Nanogenerators. Rep. Prog. Phys. 2021, 84, 096502. [Google Scholar] [CrossRef]
- Su, Y.; Chen, G.; Chen, C.; Gong, Q.; Xie, G.; Yao, M.; Tai, H.; Jiang, Y.; Chen, J. Self-Powered Respiration Monitoring Enabled By a Triboelectric Nanogenerator. Adv. Mater. 2021, 33, 2101262. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Zhao, D.; Gao, Q.; Li, X.; Wang, J.; Wang, Z.L.; Cheng, T. Material’s Selection Rules for High Performance Triboelectric Nanogenerators. Mater. Today 2023, 64, 61–71. [Google Scholar] [CrossRef]
- Xu, C.; Yu, J.; Huo, Z.; Wang, Y.; Sun, Q.; Wang, Z.L. Pursuing the Tribovoltaic Effect for Direct-Current Triboelectric Nanogenerators. Energy Environ. Sci. 2023, 16, 983–1006. [Google Scholar] [CrossRef]
- Almasi, H.; Forghani, S.; Moradi, M. Recent Advances on Intelligent Food Freshness Indicators; An Update on Natural Colorants and Methods of Preparation. Food Packag. Shelf Life 2022, 32, 100839. [Google Scholar] [CrossRef]
- Ambekar, R.S.; Kandasubramanian, B. Advancements in Nanofibers for Wound Dressing: A Review. Eur. Polym. J. 2019, 117, 304–336. [Google Scholar] [CrossRef]
- Xu, Q.; Chu, N.; Wang, Y.; Wang, H.; Xu, T.; Li, X.; Huang, S.; Li, X.; Luo, Y.; Yang, H.Y.; et al. 3D Printed Low-Tortuosity and Ultra-Thick Hierarchical Porous Electrodes for High-Performance Wearable Quasi-Solid-State Zn-VOH Batteries. Adv. Sci. 2025, 12, e2401660. [Google Scholar] [CrossRef] [PubMed]
- Bairagi, S.; Shahid-ul, I.; Shahadat, M.; Mulvihill, D.M.; Ali, W. Mechanical Energy Harvesting and Self-Powered Electronic Applications of Textile-Based Piezoelectric Nanogenerators: A Systematic Review. Nano Energy 2023, 111, 108414. [Google Scholar] [CrossRef]
- Bashir, T.; Zhou, S.; Yang, S.; Ismail, S.A.; Ali, T.; Wang, H.; Zhao, J.; Gao, L. Progress in 3D-MXene Electrodes for Lithium/Sodium/Potassium/Magnesium/Zinc/Aluminum-Ion Batteries. Electrochem. Energy Rev. 2023, 6, 1–34. [Google Scholar] [CrossRef]
- Qiu, P.; Jin, R.; Son, Y.; Ju, A.; Jiang, W.; Wang, L.; Luo, W. Mesoporous Nanofibers from Extended Electrospinning Technique. Adv. Fiber Mater. 2024, 6, 658–685. [Google Scholar] [CrossRef]
- Cao, M.; Su, J.; Fan, S.; Qiu, H.; Su, D.; Li, L. Wearable Piezoresistive Pressure Sensors Based on 3D Graphene. Chem. Eng. J. 2021, 406, 126777. [Google Scholar] [CrossRef]
- Kanani-Jazi, M.H.; Akbari, S. Quantitative XPS Analysis of Amine-Terminated Dendritic Functionalized Halloysite Nanotubes Decorated on PAN Nanofibrous Membrane and Adsorption/Filtration of Cr(VI). Chem. Eng. J. 2024, 482, 148746. [Google Scholar] [CrossRef]
- Cao, S.; Zhong, B.; Bie, C.; Cheng, B.; Xu, F. Insights into Photocatalytic Mechanism of H2 Production Integrated with Organic Transformation over WO3/Zn0.5Cd0.5S S-Scheme Heterojunction. Acta Phys. Chim. Sin. 2024, 40, 2307016. [Google Scholar] [CrossRef]
- Chen, C.; Xie, G.; Dai, J.; Li, W.; Cai, Y.; Li, J.; Zhang, Q.; Tai, H.; Jiang, Y.; Su, Y. Integrated Core-Shell Structured Smart Textiles for Active NO2 Concentration and Pressure Monitoring. Nano Energy 2023, 116, 108788. [Google Scholar] [CrossRef]
- Lv, H.; Liu, Y.; Zhou, J.; Bai, Y.; Shi, H.; Yue, B.; Shen, S.; Yu, D.-G. Efficient Piezophotocatalysis of ZnO@PVDF Coaxial Nanofibers Modified with BiVO4 and Ag for the Simultaneous Generation of H2O2 and Removal of Pefloxacin and Cr(VI) in Water. Chem. Eng. J. 2024, 484, 149514. [Google Scholar] [CrossRef]
- Cho, Y.; Beak, J.W.; Sagong, M.; Ahn, S.; Nam, J.S.; Kim, I.-D. Electrospinning and Nanofiber Technology: Fundamentals, Innovations, and Applications. Adv. Mater. 2025, e2500162. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Li, F.; Wang, Y.; Zhang, Q.; Ma, W.; Huang, C. Electrospun Nanofiber Membranes for Wastewater Treatment Applications. Sep. Purif. Technol. 2020, 250, 117116. [Google Scholar] [CrossRef]
- Meng, X.; Qiao, J.; Zheng, S.; Tian, H.; Li, B.; Liu, J.; Wu, L.; Wang, Z.; Wang, F. Ternary Nickel/Molybdenum Dioxide/Carbon Composited Nanofibers for Broadband and Strong Electromagnetic Wave Absorption. Chem. Eng. J. 2023, 457, 141241. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Z.; Xu, Y.; Bao, J.; Zhou, X. Metal Sulfide-Based Potassium-Ion Battery Anodes: Storage Mechanisms and Synthesis Strategies. Acta Phys. Chim. Sin. 2022, 38, 2205017. [Google Scholar] [CrossRef]
- Deng, L.; Zhang, X.; Li, Y.; Que, F.; Kang, X.; Liu, Y.; Feng, F.; Zhang, H. Characterization of Gelatin/Zein Nanofibers by Hybrid Electrospinning. Food Hydrocoll. 2018, 75, 72–80. [Google Scholar] [CrossRef]
- Gao, M.; Li, J.; Wang, Y.; Liang, W.; Yang, Z.; Chen, Y.; Deng, W.; Wang, Z.; Ao, T.; Chen, W. Flexible Nitrogen-Doped Carbon Nanofiber-Reinforced Hierarchical Hollow Iron Oxide Nanorods as a Binder-Free Electrode for Efficient Capacitive Deionization. Desalination 2023, 549, 116360. [Google Scholar] [CrossRef]
- Deng, S.; Liu, X.; Liao, J.; Lin, H.; Liu, F. PEI Modified Multiwalled Carbon Nanotube as A Novel Additive in PAN Nanofiber Membrane for Enhanced Removal of Heavy Metal Ions. Chem. Eng. J. 2019, 375, 122086. [Google Scholar] [CrossRef]
- Deng, Y.; Lu, T.; Cui, J.; Samal, S.K.; Xiong, R.; Huang, C. Bio-Based Electrospun Nanofiber as Building Blocks for a Novel Eco-Friendly Air Filtration Membrane: A Review. Sep. Purif. Technol. 2021, 277, 119623. [Google Scholar] [CrossRef]
- Jiang, S.; Chen, Y.; Duan, G.; Mei, C.; Greiner, A.; Agarwal, S. Electrospun Nanofiber Reinforced Composites: A Review. Polym. Chem. 2018, 9, 2685–2720. [Google Scholar] [CrossRef]
- Baig, M.M.; Saqib, Q.M.; Noman, M.; Sheeraz, M.; Rasheed, A.; Yousuf, M.; Lee, E.; Kim, J.; Ko, Y.; Patil, C.S.; et al. Novel Intercalation Approach in MXene Using Modified Silica Nanospheres to Enhance the Surface Charge Density for Superior Triboelectric Performance. Adv. Funct. Mater. 2024, 34, 2408271. [Google Scholar] [CrossRef]
- Dong, Y.; Lan, D.; Xu, S.; Gu, J.; Jia, Z.; Wu, G. Controllable Fiberization Engineering of Cobalt Anchored Mesoporous Hollow Carbon Spheres for Positive Feedback to Electromagnetic Wave Absorption. Carbon 2024, 228, 119339. [Google Scholar] [CrossRef]
- Mohammed, Y.A.Y.A.; Abdel-Mohsen, A.M.; Zhang, Q.-J.; Younas, M.; Zhong, L.-B.; Yang, J.-C.E.; Zheng, Y.-M. Facile Synthesis of ZIF-8 Incorporated Electrospun PAN/PEI Nanofibrous Composite Membrane for Efficient Cr(VI) Adsorption from Water. Chem. Eng. J. 2023, 461, 141972. [Google Scholar] [CrossRef]
- Bao, R.; Wang, C.; Dong, L.; Shen, C.; Zhao, K.; Pan, C. CdS Nanorods/Organic Hybrid LED Array and the Piezo-Phototronic Effect of the Device for Pressure Mapping. Nanoscale 2016, 8, 8078–8082. [Google Scholar] [CrossRef]
- Chen, X.; Yang, X.; Lou, Q.; Zhang, Y.; Chen, Y.; Lu, Y.; Dong, L.; Shan, C.-X. Fabry-Perot Interference and Piezo-Phototronic Effect Enhanced Flexible MoS2 Photodetector. Nano Res. 2022, 15, 4395–4402. [Google Scholar] [CrossRef]
- Aslam, M.; Kalyar, M.A.; Raza, Z.A. Polyvinyl Alcohol: A Review of Research Status and Use of Polyvinyl Alcohol Based Nanocomposites. Polym. Eng. Sci. 2018, 58, 2119–2132. [Google Scholar] [CrossRef]
- Ding, Q.; Xu, X.; Yue, Y.; Mei, C.; Huang, C.; Jiang, S.; Wu, Q.; Han, J. Nanocellulose-Mediated Electroconductive Self-Healing Hydrogels with High Strength, Plasticity, Viscoelasticity, Stretchability, and Biocompatibility toward Multifunctional Applications. ACS Appl. Mater. Interfaces 2018, 10, 27987–28002. [Google Scholar] [CrossRef] [PubMed]
- Luo, Z.; Cui, H.; Guo, J.; Yao, J.; Fang, X.; Yan, F.; Wang, B.; Mao, H. Poly(ionic liquid)/Ce-Based Antimicrobial Nanofibrous Membrane for Blocking Drug-Resistance Dissemination from MRSA-Infected Wounds. Adv. Funct. Mater. 2021, 31, 2100336. [Google Scholar] [CrossRef]
- DeVolder, R.J.; Bae, H.; Lee, J.; Kong, H. Directed Blood Vessel Growth Using an Angiogenic Microfiber/Microparticle Composite Patch. Adv. Mater. 2011, 23, 3139–3143. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Zeng, L.; Zhang, J.; Zuo, J.; Zou, J.; Ding, J.; Chen, X. Polymer Fiber Scaffolds for Bone and Cartilage Tissue Engineering. Adv. Funct. Mater. 2019, 29, 1903279. [Google Scholar] [CrossRef]
- Zhang, Y.; Kim, J.J.; Chen, D.; Tuller, H.L.; Rutledge, G.C. Electrospun Polyaniline Fibers as Highly Sensitive Room Temperature Chemiresistive Sensors for Ammonia and Nitrogen Dioxide Gases. Adv. Funct. Mater. 2014, 24, 4005–4014. [Google Scholar] [CrossRef]
- Haddad, M.Y.; Alharbi, H.F.; Karim, M.R.; Aijaz, M.O.; Alharthi, N.H. Preparation of TiO2 Incorporated Polyacrylonitrile Electrospun Nanofibers for Adsorption of Heavy Metal Ions. J. Polym. Res. 2018, 25, 218. [Google Scholar] [CrossRef]
- Daelemans, L.; Van Paepegem, W.; D’Hooge, D.R.; De Clerck, K. Excellent Nanofiber Adhesion for Hybrid Polymer Materials with High Toughness Based on Matrix Interdiffusion During Chemical Conversion. Adv. Funct. Mater. 2019, 29, 1807434. [Google Scholar] [CrossRef]
- Roshanbinfar, K.; Vogt, L.; Ruther, F.; Roether, J.A.; Boccaccini, A.R.; Engel, F.B. Nanofibrous Composite with Tailorable Electrical and Mechanical Properties for Cardiac Tissue Engineering. Adv. Funct. Mater. 2020, 30, 1908612. [Google Scholar] [CrossRef]
- Ayaz, F.; Demir, D.; Bolgen, N. Electrospun Nanofiber Mats Caged the Mammalian Macrophages on Their Surfaces and Prevented Their Inflammatory Responses Independent of the Fiber Diameter. Sci. Rep. 2024, 14, 1–8. [Google Scholar] [CrossRef]
- Chen, M.; Hu, N.; Wang, W.; Lei, L.; Fan, H.; Mueller-Buschbaum, P.; Zhong, Q. Enhanced Hydrogen Evolution in Porous and Hybrid g-C3N4/Pt-PVDF Electrospun Membranes via Piezoelectricity from Water Flow Energy. Adv. Funct. Mater. 2024, 34, 2402477. [Google Scholar] [CrossRef]
- Gao, S.; Zong, L.; Zhang, Y.; Zhang, Y.; Guo, X.; Guo, G.; Zhao, L.; Ye, F.; Fu, Y. Antifungal Pentachloronitrobenzene/Hydroxypropyl-Beta-Cyclodextrin Inclusion Complex Nanofibers by Electrospun with No Polymer: Fabrication and Characterization. J. Clean. Prod. 2023, 413, 137499. [Google Scholar] [CrossRef]
- Gregory, D.A.; Tripathi, L.; Fricker, A.T.R.; Asare, E.; Orlando, I.; Raghavendran, V.; Roy, I. Bacterial Cellulose: A Smart Biomaterial with Diverse Applications. Mater. Sci. Eng. R Rep. 2021, 145, 100623. [Google Scholar] [CrossRef]
- Yin, J.; Xu, X.; Jiang, S.; Wu, H.; Wei, L.; Li, Y.; He, J.; Xi, K.; Gao, Y. High Ionic Conductivity PEO-based Electrolyte with 3D Framework for Dendrite-Free Solid-State Lithium Metal Batteries at Ambient Temperature. Chem. Eng. J. 2022, 431, 133352. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, X.; Yu, L.; Chen, X.; Zhang, J.; Zhang, S.; Wu, S. Electrospun Polyasparthydrazide Nanofibrous Hydrogel Loading with In-Situ Synthesized Silver Nanoparticles for Full-Thickness Skin Wound Healing Application. Mater. Des. 2024, 239, 112818. [Google Scholar] [CrossRef]
- He, J.; Liang, Y.; Shi, M.; Guo, B. Anti-Oxidant Electroactive and Antibacterial Nanofibrous Wound Dressings Based on Poly(Ε-Caprolactone)/Quaternized Chitosan-Graft-Polyaniline for Full-Thickness Skin Wound Healing. Chem. Eng. J. 2020, 385, 123464. [Google Scholar] [CrossRef]
- Huang, C.; Wang, M.; Yu, S.; Yu, D.-G.; Bligh, S.W.A. Electrospun Fenoprofen/Polycaprolactone @ Tranexamic Acid/Hydroxyapatite Nanofibers as Orthopedic Hemostasis Dressings. Nanomaterials 2024, 14, 646. [Google Scholar] [CrossRef]
- Jiang, L.; Zhu, X.; Li, J.; Shao, J.; Zhang, Y.; Zhu, J.; Li, S.; Zheng, L.; Li, X.-P.; Zhang, S.; et al. Electroactive and Breathable Protective Membranes by Surface Engineering of Dielectric Nanohybrids at Poly(Lactic Acid) Nanofibers with Excellent Self-Sterilization and Photothermal Properties. Sep. Purif. Technol. 2024, 339, 126708. [Google Scholar] [CrossRef]
- Li, Q.; Tian, B.; Tang, G.; Zhan, H.; Liang, J.; Guo, P.; Liu, Q.; Wu, W. Multifunctional Conductive Hydrogels for Wearable Sensors and Supercapacitors. J. Mater. Chem. A 2024, 12, 3589–3600. [Google Scholar] [CrossRef]
- Levitt, A.S.; Alhabeb, M.; Hatter, C.B.; Sarycheva, A.; Dion, G.; Gogotsi, Y. Electrospun Mxene/Carbon Nanofibers as Supercapacitor Electrodes. J. Mater. Chem. A 2019, 7, 269–277. [Google Scholar] [CrossRef]
- Zhang, Y.; He, X.; Cong, X.; Wang, Q.; Yi, H.; Li, S.; Zhang, C.; Zhang, T.; Wang, X.; Chi, Q. Enhanced Energy Storage Performance of Polyethersulfone-Based Dielectric Composite via Regulating Heat Treatment and Filling Phase. J. Alloy. Compd. 2023, 960, 170539. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, T.; Feng, Y.; Zhang, Y.; Zhang, C.; Zhang, Y.; Wang, X.; Chi, Q.; Chen, Q.; Lei, Q. Sandwich-Structured Polymers with Electrospun Boron Nitrides Layers as High-Temperature Energy Storage Dielectrics. Chem. Eng. J. 2020, 389, 124443. [Google Scholar] [CrossRef]
- Ma, X.; Sun, N.; Li, Z.; Tong, M.; Ding, Q.; Wang, Z.; Bai, L.; Dong, L.; Liu, Y. Highly Flexible and Self-Standing Covalent Organic Framework-Metal-Organic Framework (COF-MOF) Composite Crystalline Porous Material (CPM) Membrane for Molecular Separation. Adv. Funct. Mater. 2024, 34, 2312203. [Google Scholar] [CrossRef]
- Cheon, S.; Kang, H.; Kim, H.; Son, Y.; Lee, J.Y.; Shin, H.-J.; Kim, S.-W.; Cho, J.H. High-Performance Triboelectric Nanogenerators Based on Electrospun Polyvinylidene Fluoride-Silver Nanowire Composite Nanofibers. Adv. Funct. Mater. 2018, 28, 1703778. [Google Scholar] [CrossRef]
- Chang, S.; Deng, Y.; Li, N.; Wang, L.; Shan, C.-X.; Dong, L. Continuous Synthesis of Ultra-Fine Fiber for Wearable Mechanoluminescent Textile. Nano Res. 2023, 16, 9379–9386. [Google Scholar] [CrossRef]
- Panthi, G.; Park, M.; Park, S.-J.; Kim, H.-Y. PAN Electrospun Nanofibers Reinforced with Ag2CO3 Nanoparticles: Highly Efficient Visible Light Photocatalyst for Photodegradation of Organic Contaminants in Waste Water. Macromol. Res. 2015, 23, 149–155. [Google Scholar] [CrossRef]
- Liu, L.; Wang, K.; An, X.; Wang, Y.; Shan, F.; Liu, J.; Tang, C.; Su, J.; Qin, R. Syntheses, Characterization, Luminescent and Magnetic Properties of Polymer Bifunctional Fibers Containing Terbium Complexes and Fe3O4 Nanoparticles. Mater. Res. Express 2024, 11, 085007. [Google Scholar] [CrossRef]
- Pourpirali, R.; Mahmoudnezhad, A.; Oroojalian, F.; Zarghami, N.; Pilehvar, Y. Prolonged Proliferation and Delayed Senescence of the Adipose-Derived Stem Cells Grown on the Electrospun Composite Nanofiber Co-Encapsulated with Tio2 Nanoparticles and Metformin-Loaded Mesoporous Silica Nanoparticles. Int. J. Pharm. 2021, 604, 120733. [Google Scholar] [CrossRef]
- Zhuang, X.; Cheng, B.; Kang, W.; Xu, X. Electrospun Chitosan/Gelatin Nanofibers Containing Silver Nanoparticles. Carbohydr. Polym. 2010, 82, 524–527. [Google Scholar] [CrossRef]
- Shan, D.; Qian, B.; Ding, S.-N.; Wang, X.-S.; Cosnier, S.; Zhang, X.-J. Flexible Metallization of Electrospun Nanofibers: Dramatically Enhanced Solid-State Electrochemistry and Electrochemiluminescence of the Immobilized Tris(2,2′-Bipyridyl)Ruthenium(II). Sens. Actuators B Chem. 2013, 181, 159–165. [Google Scholar] [CrossRef]
- Ding, Y.; Hou, H.; Zhao, Y.; Zhu, Z.; Fong, H. Electrospun Polyimide Nanofibers and Their Applications. Prog. Polym. Sci. 2016, 61, 67–103. [Google Scholar] [CrossRef]
- Dou, Y.; Zhang, W.; Kaiser, A. Electrospinning of Metal-Organic Frameworks for Energy and Environmental Applications. Adv. Sci. 2020, 7, 1902590. [Google Scholar] [CrossRef]
- Feng, X.; Li, J.; Zhang, X.; Liu, T.; Ding, J.; Chen, X. Electrospun Polymer Micro/Nanofibers as Pharmaceutical Repositories for Healthcare. J. Control. Release 2019, 302, 19–41. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; Wang, L.; Guo, Z.; Li, B.; Wang, H.; Luo, J.; Huang, X.; Xue, H. Flexible, Superhydrophobic, and Electrically Conductive Polymer Nanofiber Composite for Multifunctional Sensing Applications. Chem. Eng. J. 2020, 381, 122778. [Google Scholar] [CrossRef]
- Gavande, V.; Nagappan, S.; Seo, B.; Lee, W.-K. A Systematic Review on Green and Natural Polymeric Nanofibers for Biomedical Applications. Int. J. Biol. Macromol. 2024, 262, 130135. [Google Scholar] [CrossRef]
- Guo, B.; Ma, P.X. Conducting Polymers for Tissue Engineering. Biomacromolecules 2018, 19, 1764–1782. [Google Scholar] [CrossRef]
- Joshi, B.; Samuel, E.; Kim, Y.-i.; Yarin, A.L.; Swihart, M.T.; Yoon, S.S. Review of Recent Progress in Electrospinning-Derived Freestanding and Binder-Free Electrodes for Supercapacitors. Coord. Chem. Rev. 2022, 460, 214466. [Google Scholar] [CrossRef]
- Kalimuldina, G.; Turdakyn, N.; Abay, I.; Medeubayev, A.; Nurpeissova, A.; Adair, D.; Bakenov, Z. A Review of Piezoelectric PVDF Film by Electrospinning and Its Applications. Sensors 2020, 20, 5214. [Google Scholar] [CrossRef] [PubMed]
- Habibur, R.M.; Yaqoob, U.; Muhammad, S.; Uddin, A.S.M.I.; Kim, H.C. The Effect of RGO on Dielectric and Energy Harvesting Properties of P(VDF-Trfe) Matrix by Optimizing Electroactive β Phase without Traditional Polling Process. Mater. Chem. Phys. 2018, 215, 46–55. [Google Scholar] [CrossRef]
- Weimin, X.; Zhicheng, Z. PVDF-based dielectric polymers and their applications in electronic materials. IET Nanodielectrics 2018, 1, 17–31. [Google Scholar] [CrossRef]
- Chao, H.-W.; Hsu, H.-C.; Chen, Y.-R.; Chang, T.-H. Characterizing the dielectric properties of carbon fiber at different processing stages. Sci. Rep. 2021, 11, 1–7. [Google Scholar] [CrossRef]
- Aguilar, S.M.; Shea, J.D.; Al-Joumayly, M.A.; Van Veen, B.D.; Behdad, N.; Hagness, S.C. Dielectric Characterization of PCL-Based Thermoplastic Materials for Microwave Diagnostic and Therapeutic Applications. IEEE Trans. Biomed. Eng. 2012, 59, 627–633. [Google Scholar] [CrossRef] [PubMed]
- Kudryashov, M.A.; Logunov, A.A.; Mochalov, L.A.; Kudryashova, Y.P.; Trubyanov, M.M.; Barykin, A.V.; Vorotyntsev, I.V. Hopping Conductivity and Dielectric Relaxations in Ag/PAN Nanocomposites. Polymers 2021, 13, 3251. [Google Scholar] [CrossRef] [PubMed]
- Dong, K.; Wu, Z.; Deng, J.; Wang, A.C.; Zou, H.; Chen, C.; Hu, D.; Gu, B.; Sun, B.; Wang, Z.L. A Stretchable Yarn Embedded Triboelectric Nanogenerator as Electronic Skin for Biomechanical Energy Harvesting and Multifunctional Pressure Sensing. Adv. Mater. 2018, 30, e1804944. [Google Scholar] [CrossRef] [PubMed]
- Cheng, T.; Shao, J.; Wang, Z.L. Triboelectric Nanogenerators. Nat. Rev. Methods Primers 2023, 3, 1–13. [Google Scholar] [CrossRef]
- Gajula, P.; Yoon, J.U.; Woo, I.; Oh, S.-J.; Bae, J.W. Triboelectric Touch Sensor Array System for Energy Generation and Self-Powered Human-Machine Interfaces Based on Chemically Functionalized, Electrospun rGO/Nylon-12 and Micro-Patterned Ecoflex/MoS2 Films. Nano Energy 2024, 121, 109278. [Google Scholar] [CrossRef]
- Lu, L.; Hu, G.; Liu, J.; Yang, B. 5G NB-IoT System Integrated with High-Performance Fiber Sensor Inspired by Cirrus and Spider Structures. Adv. Sci. 2024, 11, e2309894. [Google Scholar] [CrossRef]
- Han, G.H.; Kim, S.W.; Kim, J.K.; Lee, S.H.; Jeong, M.H.; Song, H.C.; Choi, K.J.; Baik, J.M. 3D Multiple Triangular Prisms for Highly Sensitive Non-Contact Mode Triboelectric Bending Sensors. Nanomaterials 2022, 12, 1499. [Google Scholar] [CrossRef]
- Cao, X.; Xiong, Y.; Sun, J.; Xie, X.; Sun, Q.; Wang, Z.L. Multidiscipline Applications of Triboelectric Nanogenerators for the Intelligent Era of Internet of Things. Nano Micro Lett. 2023, 15, 1–41. [Google Scholar] [CrossRef]
- Feng, T.; Ling, D.; Li, C.; Zheng, W.; Zhang, S.; Li, C.; Emel’yanov, A.; Pozdnyakov, A.S.; Lu, L.; Mao, Y. Stretchable On-Skin Touchless Screen Sensor Enabled by Ionic Hydrogel. Nano Res. 2024, 17, 4462–4470. [Google Scholar] [CrossRef]
- He, M.; Du, W.; Feng, Y.; Li, S.; Wang, W.; Zhang, X.; Yu, A.; Wan, L.; Zhai, J. Flexible and Stretchable Triboelectric Nanogenerator Fabric for Biomechanical Energy Harvesting and Self-Powered Dual-Mode Human Motion Monitoring. Nano Energy 2021, 86, 106058. [Google Scholar] [CrossRef]
- Pandey, P.; Thapa, K.; Ojha, G.P.; Seo, M.-K.; Shin, K.H.; Kim, S.W.; Sohn, J.I. Metal-Organic Frameworks-Based Triboelectric Nanogenerator Powered Visible Light Communication System for Wireless Human-Machine Interactions. Chem. Eng. J. 2023, 452, 139209. [Google Scholar] [CrossRef]
- Zhu, P.; Zhang, B.; Wang, H.; Wu, Y.; Cao, H.; He, L.; Li, C.; Luo, X.; Li, X.; Mao, Y. 3D Printed Triboelectric Nanogenerator as Self-Powered Human-Machine Interactive Sensor for Breathing-Based Language Expression. Nano Res. 2022, 15, 7460–7467. [Google Scholar] [CrossRef]
- Lan, L.; Ping, J.; Xiong, J.; Ying, Y. Sustainable Natural Bio-Origin Materials for Future Flexible Devices. Adv. Sci. 2022, 9, e2200560. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, M.; Zhang, Z.; Chen, Z.; Shi, Q.; Shan, X.; Yeow, R.C.H.; Lee, C. Artificial Intelligence of Things (AIoT) Enabled Virtual Shop Applications Using Self-Powered Sensor Enhanced Soft Robotic Manipulator. Adv. Sci. 2021, 8, 2100230. [Google Scholar] [CrossRef]
- Wu, M.; Wang, X.; Xia, Y.; Zhu, Y.; Zhu, S.; Jia, C.; Guo, W.; Li, Q.; Yan, Z. Stretchable Freezing-Tolerant Triboelectric Nanogenerator and Strain Sensor Based on Transparent, Long-Term Stable, and Highly Conductive Gelatin-Based Organohydrogel. Nano Energy 2022, 95, 106967. [Google Scholar] [CrossRef]
- Yang, P.; Shi, Y.; Li, S.; Tao, X.; Liu, Z.; Wang, X.; Wang, Z.L.; Chen, X. Monitoring the Degree of Comfort of Shoes In-Motion Using Triboelectric Pressure Sensors with an Ultrawide Detection Range. ACS Nano 2022, 16, 4654–4665. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, D.; Mao, R.; Zhou, L.; Yang, C.; Wu, Y.; Liu, Y.; Ji, Y. MoS2-Based Charge Trapping Layer Enabled Triboelectric Nanogenerator with Assistance of CNN-GRU Model for Intelligent Perception. Nano Energy 2024, 127, 109753. [Google Scholar] [CrossRef]
- Chang, K.-B.; Parashar, P.; Shen, L.C.; Chen, A.-R.; Huang, Y.-T.; Pal, A.; Lim, K.-C.; Wei, P.-H.; Kao, F.-C.; Hu, J.-J.; et al. A Triboelectric Nanogenerator-Based Tactile Sensor Array System for Monitoring Pressure Distribution inside Prosthetic Limb. Nano Energy 2023, 111, 108397. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, P.; Zhang, F.; Li, P.; Huang, W.; Li, C.; Han, N.; Mu, S.; Zhou, H.; Mao, Y. Intrinsically Stretchable Polymer Semiconductor Based Electronic Skin for Multiple Perceptions of Force, Temperature, and Visible Light. Nano Res. 2023, 16, 1196–1204. [Google Scholar] [CrossRef]
- Niu, Z.; Wang, Q.; Lu, J.; Hu, Y.; Huang, J.; Zhao, W.; Liu, Y.; Long, Y.-Z.; Han, G. Electrospun Cellulose Nanocrystals Reinforced Flexible Sensing Paper for Triboelectric Energy Harvesting and Dynamic Self-Powered Tactile Perception. Small 2024, 20, e2307810. [Google Scholar] [CrossRef]
- Zhu, P.; Mu, S.; Huang, W.; Sun, Z.; Lin, Y.; Chen, K.; Pan, Z.; Haghighi, M.G.; Sedghi, R.; Wang, J.; et al. Soft Multifunctional Neurological Electronic Skin through Intrinsically Stretchable Synaptic Transistor. Nano Res. 2024, 17, 6550–6559. [Google Scholar] [CrossRef]
- Hou, Y.; Li, Z.; Wang, Z.; Zhang, X.; Li, Y.; Li, C.; Guo, H.; Yu, H. Programmable and Surface-Conformable Origami Design for Thermoelectric Devices. Adv. Sci. 2024, 11, e2309052. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, D.; Wang, Z.; Xi, G.; Mao, R.; Ma, Y.; Wang, D.; Tang, M.; Xu, Z.; Luan, H. Ultrastretchable, Self-Healing Conductive Hydrogel-Based Triboelectric Nanogenerators for Human-Computer Interaction. ACS Appl. Mater. Interfaces 2023, 15, 5128–5138. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Wang, M.; Wu, J.; Zhu, C.; Shi, J.; Morikawa, H. Stretchable, Adhesive, Self-Healable, and Conductive Hydrogel-Based Deformable Triboelectric Nanogenerator for Energy Harvesting and Human Motion Sensing. ACS Appl. Mater. Interfaces 2022, 14, 9126–9137. [Google Scholar] [CrossRef]
- Yang, M.; Cheng, Y.; Yue, Y.; Chen, Y.; Gao, H.; Li, L.; Cai, B.; Liu, W.; Wang, Z.; Guo, H.; et al. High-Performance Flexible Pressure Sensor with a Self-Healing Function for Tactile Feedback. Adv. Sci. 2022, 9, e2200507. [Google Scholar] [CrossRef]
- Jiang, F.; Zhou, X.; Lv, J.; Chen, J.; Chen, J.; Kongcharoen, H.; Zhang, Y.; Lee, P.S. Stretchable, Breathable, and Stable Lead-Free Perovskite/Polymer Nanofiber Composite for Hybrid Triboelectric and Piezoelectric Energy Harvesting. Adv. Mater. 2022, 34, e2200042. [Google Scholar] [CrossRef] [PubMed]
- Guan, X.; Xu, B.; Wu, M.; Jing, T.; Yang, Y.; Gao, Y. Breathable, Washable and Wearable Woven-Structured Triboelectric Nanogenerators Utilizing Electrospun Nanofibers for Biomechanical Energy Harvesting and Self-Powered Sensing. Nano Energy 2021, 80, 105549. [Google Scholar] [CrossRef]
- Faruk, O.; Islam, M.R.; Rana, S.M.S.; Pradhan, G.B.; Kim, H.; Asaduzzaman, M.; Bhatta, T.; Park, J.Y. V2CTX-MXene-Functionalized Fluoropolymer Composite Nanofibrous Mat-Based High-Performance Triboelectric Nanogenerator for Self-Powered Human Activity and Posture Monitoring. Nano Energy 2024, 127, 109787. [Google Scholar] [CrossRef]
- Hao, Y.; Zhang, Y.; Li, J.; Guo, A.J.X.; Lv, P.; Wei, Q. An All-Nanofiber-Based Customizable Biomimetic Electronic Skin for Thermal-Moisture Management and Energy Conversion. Adv. Fiber Mater. 2025. [Google Scholar] [CrossRef]
- Yu, Z.; Zhu, Z.; Zhang, Y.; Li, X.; Liu, X.; Qin, Y.; Zheng, Z.; Zhang, L.; He, H. Biodegradable and Flame-Retardant Cellulose-Based Wearable Triboelectric Nanogenerator for Mechanical Energy Harvesting in Firefighting Clothing. Carbohydr. Polym. 2024, 334, 122040. [Google Scholar] [CrossRef]
- Ni, Q.; Lou, Q.; Shen, C.; Zheng, G.; Song, R.; Hao, J.; Liu, J.; Zhu, J.; Zang, J.; Dong, L.; et al. Sensitive Humidity Sensor Based on Moisture-Driven Energy Generation. Nano Res. 2024, 17, 5578–5586. [Google Scholar] [CrossRef]
- Ma, F.; Wu, Y.; Dai, S.; Lin, P.; Sun, J.; Dong, L. A Soft-Contact Hybrid Electromagnetic-Triboelectric Nanogenerator for Self-Powered Water Splitting Towards Hydrogen Production. Nano Res. 2024, 17, 6567–6574. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, M.; Huang, J.; Jiang, T.; Zou, J.; Wang, N.; Wang, Z.L. Inductor-Free Wireless Energy Delivery via Maxwell’s Displacement Current from an Electrodeless Triboelectric Nanogenerator. Adv. Mater. 2018, 30, 1704077. [Google Scholar] [CrossRef]
- He, G.; Wei, K.; Lu, R.; Zhang, Y.; Shen, L.; Wang, Z.L.; Wu, Y. Highly Robust Self-Switching Mode Triboelectric Nanogenerator Based on Misaligned Triple-Cam Design. Adv. Eng. Mater. 2024, 26, 2301712. [Google Scholar] [CrossRef]
- Chun, S.; Pang, C.; Cho, S.B. A Micropillar-Assisted Versatile Strategy for Highly Sensitive and Efficient Triboelectric Energy Generation under In-Plane Stimuli. Adv. Mater. 2020, 32, e1905539. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Qin, J.; Yang, X.; Lv, C.; Huang, W.; Li, F.; Zhang, C.; Wu, Y.; Dong, L.; Shan, C. Highly Sensitive Humidity Sensors Based on Hexagonal Boron Nitride Nanosheets for Contactless Sensing. Nano Res. 2023, 16, 10279–10286. [Google Scholar] [CrossRef]
- Hu, Y.; Li, X.; Gao, Y.; Zhao, Z.; Zhang, B.; Zhang, C.; He, L.; Liu, J.; Zhou, L.; Wang, Z.L.; et al. A Noncontact Constant-Voltage Triboelectric Nanogenerator via Charge Excitation. ACS Energy Lett. 2023, 8, 2066–2076. [Google Scholar] [CrossRef]
- Huang, L.-b.; Xu, W.; Bai, G.; Wong, M.-C.; Yang, Z.; Hao, J. Wind Energy and Blue Energy Harvesting Based on Magnetic-Assisted Noncontact Triboelectric Nanogenerator. Nano Energy 2016, 30, 36–42. [Google Scholar] [CrossRef]
- Jiao, F.; Lin, C.; Dong, L.; Mao, X.; Wu, Y.; Dong, F.; Zhang, Z.; Sun, J.; Li, S.; Yang, X.; et al. Silicon Vacancies Diamond/Silk/PVA Hierarchical Physical Unclonable Functions for Multi-Level Encryption. Adv. Sci. 2024, 11, e2308337. [Google Scholar] [CrossRef]
- Ye, G.; Wu, Q.; Chen, Y.; Wang, X.; Xiang, Z.; Duan, J.; Wan, Y.; Yang, P. Bimodal Coupling Haptic Perceptron for Accurate Contactless Gesture Perception and Material Identification. Adv. Fiber Mater. 2024, 6, 1874–1886. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, W.; Xiao, Z.; Zhang, S.; Li, W.; Hu, J.; Feng, T.; Wu, J.; Zhu, P.; Mao, Y. Deep-Learning-Assisted Noncontact Gesture-Recognition System for Touchless Human-Machine Interfaces. Adv. Funct. Mater. 2022, 32, 2208271. [Google Scholar] [CrossRef]
- Li, S.; Wang, S.; Zi, Y.; Wen, Z.; Lin, L.; Zhang, G.; Wang, Z.L. Largely Improving the Robustness and Lifetime of Triboelectric Nanogenerators through Automatic Transition between Contact and Noncontact Working States. ACS Nano 2015, 9, 7479–7487. [Google Scholar] [CrossRef]
- Zhu, P.; Niu, M.; Liang, S.; Yang, W.; Zhang, Y.; Chen, K.; Pan, Z.; Mao, Y. Non-Hand-Worn, Load-Free VR Hand Rehabilitation System Assisted by Deep Learning Based on Ionic Hydrogel. Nano Res. 2025, 18, 94907301. [Google Scholar] [CrossRef]
- Xi, Y.; Hua, J.; Shi, Y. Noncontact Triboelectric Nanogenerator for Human Motion Monitoring and Energy Harvesting. Nano Energy 2020, 69, 104390. [Google Scholar] [CrossRef]
- Lin, L.; Wang, S.; Niu, S.; Liu, C.; Xie, Y.; Wang, Z.L. Noncontact Free-Rotating Disk Triboelectric Nanogenerator as a Sustainable Energy Harvester and Self-Powered Mechanical Sensor. ACS Appl. Mater. Interfaces 2014, 6, 3031–3038. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Zhu, J.; Ma, P.; Jie, Y.; Wang, Z.L.; Cao, X. Fish Bladder Film-Based Triboelectric Nanogenerator for Noncontact Position Monitoring. ACS Energy Lett. 2020, 5, 3005–3011. [Google Scholar] [CrossRef]
- Duan, J.; Yue, G.; Li, H.; Liu, T.; Wang, P.; Yu, W.; Shang, P.; Meng, C.; Guo, S. Self-Powered Noncontact Triboelectric Nanogenerators with Microstructured Square-Loop Surface and Dielectric Electron-Blocking Layer for Far-Distance Motion Perception and Trajectory Tracking. Nano Energy 2024, 128, 109860. [Google Scholar] [CrossRef]
- Mehamud, I.; Bjoerling, M.; Marklund, P.; Shi, Y. Durable Self-Powered Wireless IoT Machine Condition Monitoring System Based on an Auto-Switching Non-Contact Centrifugal TENG. Adv. Mater. Technol. 2025, 10. [Google Scholar] [CrossRef]
- Babu, A.; Malik, P.; Das, N.; Mandal, D. Surface Potential Tuned Single Active Material Comprised Triboelectric Nanogenerator for a High Performance Voice Recognition Sensor. Small 2022, 18, e2201331. [Google Scholar] [CrossRef]
- Gao, M.; Liu, W.; Chen, K.; Sun, H.; Liu, X.; Xing, H.; Wang, H.; Zhu, B.; Guo, H. Piezoresistive Effect: A New Concept for Hearing Aids. Adv. Sci. 2025, 12, e2501227. [Google Scholar] [CrossRef]
- Divya, S.; Panda, S.; Hajra, S.; Jeyaraj, R.; Paul, A.; Park, S.H.; Kim, H.J.; Oh, T.H. Smart Data Processing for Energy Harvesting Systems Using Artificial Intelligence. Nano Energy 2023, 106, 108084. [Google Scholar] [CrossRef]
- Dai, Y.; Li, Y.; Xuan, S.; Dai, Y.; Xu, T.; Yu, H. Triboelectric Nanogenerator-Based Flexible Acoustic Sensor for Speech Recognition. ACS Appl. Mater. Interfaces 2025, 17, 11117–11125. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Zhang, Y.; Ning, C.; Ji, Q.; Peng, X.; Dong, K.; Wang, Z.L. Ultrathin Eardrum-Inspired Self-Powered Acoustic Sensor for Vocal Synchronization Recognition with the Assistance of Machine Learning. Small 2022, 18, 2106960. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.; Pu, X.; Chen, J.; Meng, Y.; Yeh, M.-H.; Liu, G.; Tang, Q.; Chen, B.; Liu, D.; Qi, S.; et al. A Highly Sensitive, Self-Powered Triboelectric Auditory Sensor for Social Robotics and Hearing Aids. Sci. Robot. 2018, 3, eaat2516. [Google Scholar] [CrossRef]
- Hsieh, P.-c.V. Aural Resilience Sonic Labour in Chen Ting-jung’s You Are the Only One I Care About (Whisper). Third Text 2023, 37, 509–524. [Google Scholar] [CrossRef]
- Son, G.; Seo, D.; Kim, D.; Kim, S.; Kong, J.; Kim, K.; Chung, J. Capacitive Structure-Based Acoustic Triboelectric Nanogenerator for Advanced Warning Sound Recognition. Adv. Eng. Mater. 2025, 27, 2402442. [Google Scholar] [CrossRef]
- Wajahat, M.; Kouzani, A.Z.; Khoo, S.Y.; Mahmud, M.A.P. A Review on Extrusion-Based 3D-Printed Nanogenerators for Energy Harvesting. J. Mater. Sci. 2022, 57, 140–169. [Google Scholar] [CrossRef]
- Shrestha, K.; Sharma, S.; Pradhan, G.B.; Bhatta, T.; Maharjan, P.; Rana, S.S.; Lee, S.; Seonu, S.; Shin, Y.; Park, J.Y. A Siloxene/Ecoflex Nanocomposite-Based Triboelectric Nanogenerator with Enhanced Charge Retention by MoS2/LIG for Self-Powered Touchless Sensor Applications. Adv. Funct. Mater. 2022, 32, 2113005. [Google Scholar] [CrossRef]
- Jean, F.; Khan, M.U.; Alazzam, A.; Mohammad, B. Harnessing Ambient Sound: Different Approaches to Acoustic Energy Harvesting Using Triboelectric Nanogenerators. J. Sci. Adv. Mater. Devices 2024, 9, 100805. [Google Scholar] [CrossRef]
- Li, J.; Shi, Y.; Chen, J.; Huang, Q.; Ye, M.; Guo, W. Flexible Self-Powered Low-Decibel Voice Recognition Mask. Sensors 2024, 24, 3007. [Google Scholar] [CrossRef]
- Ji, X.; Zhao, T.; Zhao, X.; Lu, X.; Li, T. Triboelectric Nanogenerator Based Smart Electronics via Machine Learning. Adv. Mater. Technol. 2020, 5, 1900921. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Abu Zahed, M.; Rahman, M.T.; Salauddin, M.; Lee, S.H.; Park, C.; Maharjan, P.; Bhatta, T.; Shrestha, K.; Park, J.Y. Cobalt-Nanoporous Carbon Functionalized Nanocomposite-Based Triboelectric Nanogenerator for Contactless and Sustainable Self-Powered Sensor Systems. Adv. Funct. Mater. 2021, 31, 2105110. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, W.; Ma, Z.; Zhao, H.; Ren, L. Self-Powered Fl Exible Electronic Skin Tactile Sensor with 3D Force Detection. Mater. Today 2024, 81, 84–94. [Google Scholar] [CrossRef]
- Luo, H.; Du, J.; Yang, P.; Shi, Y.; Liu, Z.; Yang, D.; Zheng, L.; Chen, X.; Wang, Z.L. Human-Machine Interaction via Dual Modes of Voice and Gesture Enabled by Triboelectric Nanogenerator and Machine Learning. ACS Appl. Mater. Interfaces 2023, 15, 17009–17018. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Advantages | Challenges |
|---|---|---|
| Electrospinning-based | High surface area, tunable fiber morphology | Scaling up, fiber uniformity, mechanical stability |
| MXene-based | High conductivity, mechanical strength, flexibility | Synthesis complexity, material cost |
| Polymer blend-based | Improved mechanical properties, charge generation | Blending compatibility, processing difficulty |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, J.; Zhang, J.; Zhang, Y.; Liu, J.; Hu, Y.; Liu, C.; Zhu, P.; Lu, L.; Mao, Y. Recent Advances in Electrospun Nanofiber-Based Self-Powered Triboelectric Sensors for Contact and Non-Contact Sensing. Nanomaterials 2025, 15, 1080. https://doi.org/10.3390/nano15141080
Tian J, Zhang J, Zhang Y, Liu J, Hu Y, Liu C, Zhu P, Lu L, Mao Y. Recent Advances in Electrospun Nanofiber-Based Self-Powered Triboelectric Sensors for Contact and Non-Contact Sensing. Nanomaterials. 2025; 15(14):1080. https://doi.org/10.3390/nano15141080
Chicago/Turabian StyleTian, Jinyue, Jiaxun Zhang, Yujie Zhang, Jing Liu, Yun Hu, Chang Liu, Pengcheng Zhu, Lijun Lu, and Yanchao Mao. 2025. "Recent Advances in Electrospun Nanofiber-Based Self-Powered Triboelectric Sensors for Contact and Non-Contact Sensing" Nanomaterials 15, no. 14: 1080. https://doi.org/10.3390/nano15141080
APA StyleTian, J., Zhang, J., Zhang, Y., Liu, J., Hu, Y., Liu, C., Zhu, P., Lu, L., & Mao, Y. (2025). Recent Advances in Electrospun Nanofiber-Based Self-Powered Triboelectric Sensors for Contact and Non-Contact Sensing. Nanomaterials, 15(14), 1080. https://doi.org/10.3390/nano15141080