1. Introduction
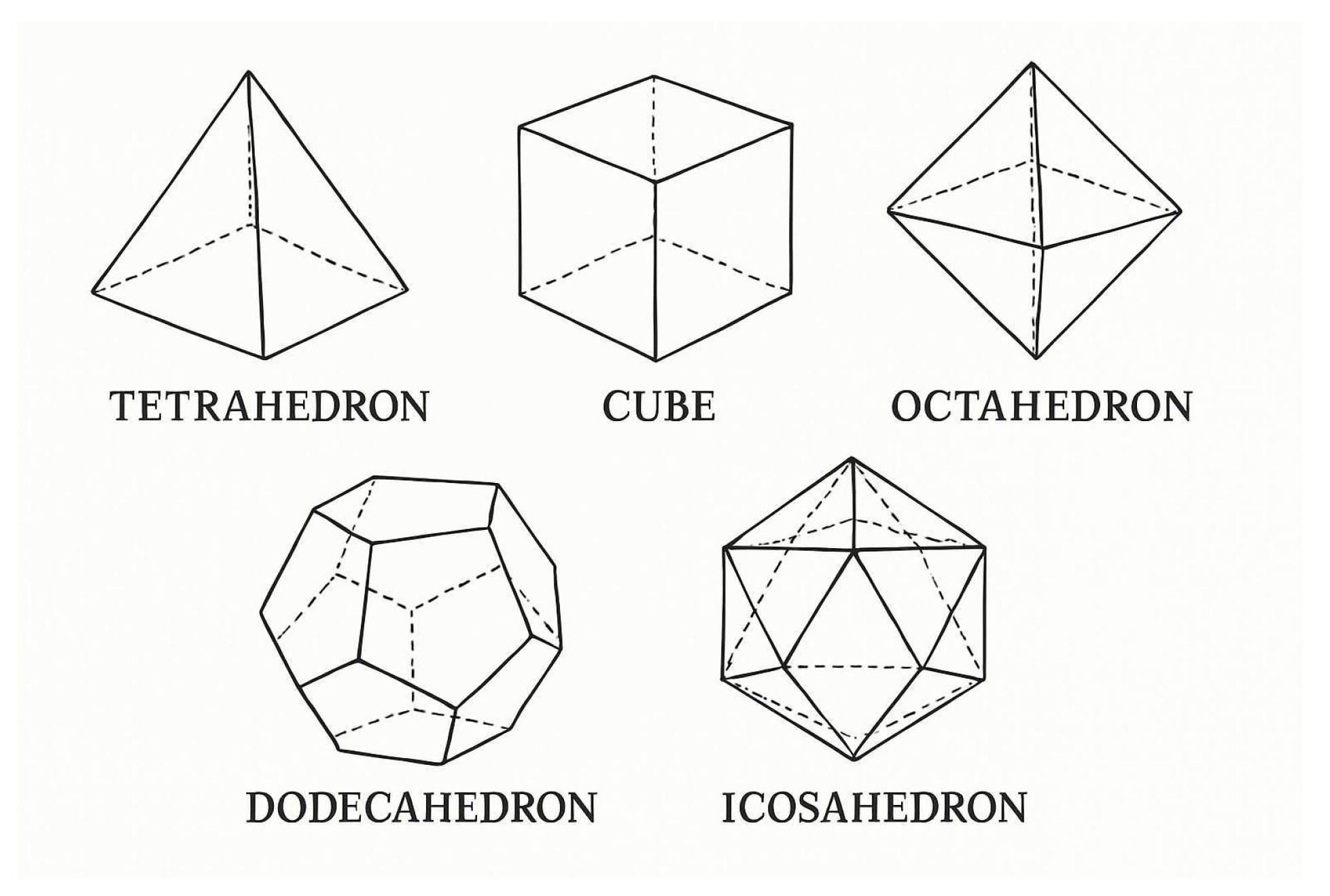
In a three-dimensional (3D) space, the regular polyhedra, also known as Platonic solids, are a special class of polyhedra that have the following characteristics. (i) Identical faces: All faces of a regular polyhedron are congruent regular polygons (polygons where all sides and angles are equal). (ii) Identical vertices: Each vertex has the same number of edges meeting at it, making the polyhedron vertex-transitive. (iii) Symmetry: Regular polyhedra have high symmetry, meaning they look the same after being rotated or reflected in space. There are exactly five regular polyhedra in 3D space, the tetrahedron, cube, octahedron, dodecahedron, and icosahedron. Each has its own distinct properties. For instance, a tetrahedron has four triangular faces, four vertices and six edges. If a particle is localized at each vertex, the resulting structure may be viewed as a nanocrystal containing a small finite number of particles. Depending on the nature of interaction between the particles, the nanocrystal may often exhibit unique properties that differ from those of bulk materials. These properties arise because a significant proportion of the particles are located at or near the surface, where they behave differently from those in the interior. Undoubtedly, the five regular polyhedra predate human history. They appear in many natural forms and have emerged early in mathematical history. These five are the only regular polyhedra as confirmed by multiple proofs, for example, via the classical approach analyzing permissible face polygons and vertex angle sums, the topological proof leveraging the Euler characteristic, and Legendre’s elegant spherical geometry argument. A less refined but dimensionally generalizable proof examines the ratio of edge length to circumscribed sphere diameter, connecting it to the corresponding ratio of the lower-dimensional vertex figure (the convex hull of a vertex’s neighboring vertices).
In any
d-dimensional space,
, generalizations of the tetrahedron, cube, and octahedron exist. They are known as the
d-simplex,
d-cube, and
d-orthoplex. Beyond these, the only regular polytopes are the dodecahedron and icosahedron in
and three exceptional polytopes in
: the 24-cell, 120-cell, and 600-cell, named for their respective facet counts. The 120-cell and 600-cell are duals. Each
also admits a generalized cube tiling, the
d-cube tiling. The sole non-cube regular tilings are two in
(the dual triangle and hexagon tilings) and a pair of dual tilings in
using 24-cells and 4-orthoplexes. The interest in these high-dimensional objects is motivated by the appealing underlying beauty, cemented by an inherent sense of symmetry. The broad concept of symmetry (its preservation or breaking) is to be found not only in mathematical structures, but also at the heart of physics. In the present work, we extend this curiosity to regular structures that are found in
dimensions. The systems that we consider are the only six polytopes that are regular in a four-dimensional (4D) space [
1] consisting of classical dipoles located at their vertices.
Systems with dipole–dipole interactions are important because they play a crucial role in determining the physical properties of many materials, especially in molecular and condensed matter systems [
2,
3,
4,
5,
6,
7,
8]. Dipole systems in one-dimensional (1D) arrays are relatively simple to study. Having the dipoles interact in a 1D linear arrangement leads to more predictable and analytically tractable behavior [
9,
10]. In higher dimensions, however, the anisotropic and long-range nature of dipole–dipole interactions leads to frustration, complex ordering, and richer phase behavior, making the systems much more challenging to analyze [
11,
12]. These interactions influence phase behavior, self-assembly, and structural organization in soft matter, such as liquid crystals and biological membranes. Additionally, dipole–dipole interactions are fundamental in areas like quantum computing and molecular spectroscopy, where they affect energy transfer and coherence in quantum systems.
Significant experimental and theoretical advancements have been made in recent years concerning the characterization of dipolar gases with large dipole moments [
13,
14,
15]. At sufficiently low temperatures, the formation of a classical crystal composed of dipolar particles becomes a plausible scenario. However, given the intrinsic nature of the dipole–dipole interaction, such a configuration is only viable if this force remains stable against thermal fluctuations. Systems involving dipoles oriented in different planes have been previously studied, both from a classical perspective [
16,
17,
18,
19,
20] and a quantum mechanical one [
21,
22,
23,
24,
25,
26]. A key observation is that, due to various quantum effects, dipolar interactions exhibit unconventional properties in helium [
27] and can also explain certain phenomena observed in magnetic colloids [
28,
29]. In most physical systems, the dipole–dipole interaction is relatively weak compared to other forces governing structural stability and material ordering. Nevertheless, this interaction is crucial in shaping magnetic domain orders. Therefore, to ensure the mathematical formalism is physically meaningful and amenable to classical treatment, dipole moments must be considered large.
2. Exploration of the Minimum Energy and Equilibrium Configurations
As already mentioned, there are only five regular polyhedra (Platonic solids) in a 3D space, as shown in
Figure 1. In a 4D space, the number of possible regular polychora (4D analogs) is limited to six by the constraints of geometric regularity. A regular polychoron in a 4D space must consist of identical regular polyhedral cells meeting in identical configurations around each edge and vertex. The key restriction arises from the Schläfli symbol
[
1]. This symbol is a notation used in geometry to describe a regular polychoron with
p-sided polygonal faces,
q such faces around each vertex in the cell (a regular polyhedron denoted as
represents the 3D cell) and
r such cells around each edge. The condition that the dihedral angles of the cells must sum to less than
around an edge (to avoid overlap) limits the possible combinations of
. Only six sets of integers satisfy this and other geometric constraints in 4D space: the 5-cell
, 8-cell
, 16-cell
, 24-cell
, 120-cell
, and 600-cell
. The reasoning mirrors the 3D case but extends to higher-dimensional symmetry. For instance, just as the icosahedron
cannot tile 3D space (as five tetrahedra around an edge leave a gap, but six overlap), only certain configurations close neatly in 4D space. The 24-cell
is unique to 4D space arising from the exceptional symmetry of octahedral cells
fitting four around each edge. The other polychora correspond to 4D analogs of the tetrahedron, cube, and dodecahedron. The nonexistence of a seventh regular polychoron follows from the fact that any other
would either fail to close properly or exceed angle bounds, just as attempting to construct a Platonic solid with hexagonal faces fails in a 3D scenario. Therefore, only six regular polychora exist as witnesses to the elegant interplay of geometry and dimensionality.
The objective of our work is to study a system consisting of identical dipoles each with a fixed dipole moment
in an arbitrary spatial dimension (in our case, a 4D space). Unless otherwise noted, vectors are represented by bold symbols (e.g.,
or
). In some cases, particularly for emphasis or clarity, vectors may instead be written with an arrow overhead, as in
or
. Both styles indicate vectors. The 4D dipole moment vector,
is then represented as follows:
The interaction energy between any two dipoles,
and
localized at positions
and
, respectively, is given by
where
is the vector between the positions of the two dipoles
u and
v and
is the corresponding separation distance. The constant
C is either
(for magnetic dipoles) or
(for electric dipoles).
Physically, the classical extremum energy states (either minimum or maximum value of energy) of a magnetic dipole system correspond to one of equilibrium in which no torque should act on any given dipole. Let us now consider the entire system of
N dipoles. By slightly changing the notation, we write the general Hamiltonian as follows:
where
Here,
represents the separation vector between two classical
spins,
and
, both of unit length. The indices
k and
l label the unit cells, while
i and
j enumerate the basis sites within the unit cell. Greek indices
and
indicate the vector components (
). The prefactor
accounts for the avoidance of double counting. The constants
C and
encode the (electric or magnetic) nature of the dipoles. For our purposes, we will suppress these terms (we set them to one) and present all energies in dimensionless units. We remark that the Hamiltonian in Equation (
3) admits an elegant mathematical formulation as a quadratic form.
Now that the Hamiltonian of the system is defined, we next require a proper parametrization for the orientation of the dipole moment in
. We shall take the usual extension of spherical coordinates for all dipoles in the following form:
In the notation of Equation (
5),
denotes components of the dipole moment vector while
r is its corresponding magnitude. Within the framework of the dipole–dipole interaction, the magnitude of the dipole moment is not necessary for defining its direction. Therefore, we shall employ unit dipoles, and we shall have
in Equation (
5). From Equation (
5), we observe that a dipole in
d dimensions requires a set of
independent angles
to fully define its orientation in
. Depending on the polytope, the number of vertices
V will grow following different rates. However, the total number of variables to employ in the minimization of Equation (
3) will become considerable with increasing
d once the positions of the
V vertices
are given.
Consequently, practical analysis typically requires approximate or heuristic approaches. The most effective statistical method currently available is Kirkpatrick, Gelatt, and Vecchi’s simulated annealing approach [
30], which implements the Metropolis Monte Carlo algorithm with a constant temperature at each stage of the annealing process. Alternative non-statistical approaches include downhill/amoeba and gradient methods [
31]. These techniques employ finite differences when evaluating the objective function across all relevant real variables. In our case, it shall suffice to employ the simulated method throughout our computations. Regarding the position vectors
, we shall choose the standard definition of the coordinates of the vertices in all three polytopes, centered at the origin, and tailored to have unit edge length. Three classes of regular polytopes exist for all dimensions [
1]. These are the
d-simplex, the
d-orthoplex or cross-polytope, and the
d-cube. For the
case, there are six of them, which we study separately in each of the following six subsections (
Section 2.1,
Section 2.2,
Section 2.3,
Section 2.4,
Section 2.5 and
Section 2.6).
2.1. The 5-Cell (4-Simplex)
The unit length
-simplex,
has its vertices given by the
N vectors (
):
where the quantity
gives the center-to-vertex distance for a regular
N-polytope of unit edge length. It is straightforward to verify that this configuration satisfies
as demanded by the geometric constraints. This specific vertex arrangement for the
N-simplex offers the computational advantage of simplifying dimensional expansion. This way, each new dimension requires only the addition of a fresh azimuthal axis to the existing structure. These vectors also comply with the relation
.
The 5-cell is the simplest of the 4D structures under current scrutiny, with the number of vertices being
and number of edges being
. The minimum energy is found to be
exactly and
. The values for various parameters that correspond to the minimum total energy configuration are shown in
Table 1. We found that the scalar product,
is the same for all dipoles, whereas the energy contributions of the interacting dipoles are defined by a finite set of different values for all pairs. In a nutshell, their sum adds up to a rational number. An interesting result is that
for all
k. That is, all dipoles are perpendicular the their vector positions. The corresponding equilibrium angles are given in
Table 2. As in the case of the more familiar 3-simplex (tetrahedron) they are irrational fractions of number,
.
2.2. The 5-Cell (4-Orthoplex)
Orthoplexes or cross-polytopes are regular, convex polytopes that extend the regular octahedron to higher dimensions. Going from one dimension to the next one adds two vertices each time. As opposed to the simplex, one more pairwise distance is added,
. Specifically, all these dipoles that are furthest away contribute to the energy only with
, in all dimensions. For this regular polytope, the number of vertices is
and the number of edges is
. We obtain a minimum energy,
and
. The values for various parameters that correspond to the minimum total energy configuration for the case of a 5-cell (4-orthoplex) are shown in
Table 3.
We also found that
for all
k. The values of the equilibrium angles for the case of a 5-cell (4-orthoplex) are shown in
Table 4. We also investigated the possibility of obtaining an analytic expression for the minimum energy. We found that the precise expression for the components of the dipole moments are given as
, with
. To the best of our knowledge, the solution to the corresponding minimization procedure returns an expression for
that seems to be given in a transcendental form.
2.3. The 8-Cell (Hypercube)
Let us recall that the 8-cell (also known as the tesseract or hypercube) is a body formed by the convex hull of points
in
d dimensions (the number of vertices for such a case would be
). This situation has been partially studied in ref. [
32]. For the 3D cube, the equilibrium angles are given in terms of two incommensurate numbers, namely,
and
. The cube constitutes one of the few instances where one can actually notice the transcendental nature of the equilibrium angles. Incidentally, the cube (and the tetrahedron) are the only instances among all five regular polyhedra where irrational numbers occur. Extending the previous calculations to the tesseract (hypercube), one obtains the value of energy,
. The surprising outcome is that the tesseract (hypercube), which possesses a total null dipole moment as well, supports commensurate equilibrium angles. As we shall see, out of the three angles
for the dipole orientations, the third angle in each case can be arbitrary. It is known that
cubes present a richer structure than the other two families of regular polytopes. The representation chosen (construction and enumeration) is such that we enumerate the vertices
following the binary representation
and then replacing “
” with “
”, “
” with “
” and so on. In this fashion we guarantee that the vector sum of all positions is null and that the
d-cube is centered at the origin.
The 4-cube or tesseract (hypercube) has 16 vertices, 32 edges, 24 square faces, and 8 cubes (hence the name “8-cell”). Thus, metrically speaking, we shall encounter edges of length 1, square diagonals of length
, opposite cube vertices with length
, and the diagonals of the 4-cube of length 2 (the maximum length in an
d-cube is
). The corresponding equilibrium angles (
arbitrary) for the case of the 8-cell (hypercube) are shown in
Table 5. At further scrutiny, we can conclude that all angles involved in the dipole orientations are commensurate.
2.4. The 24-Cell
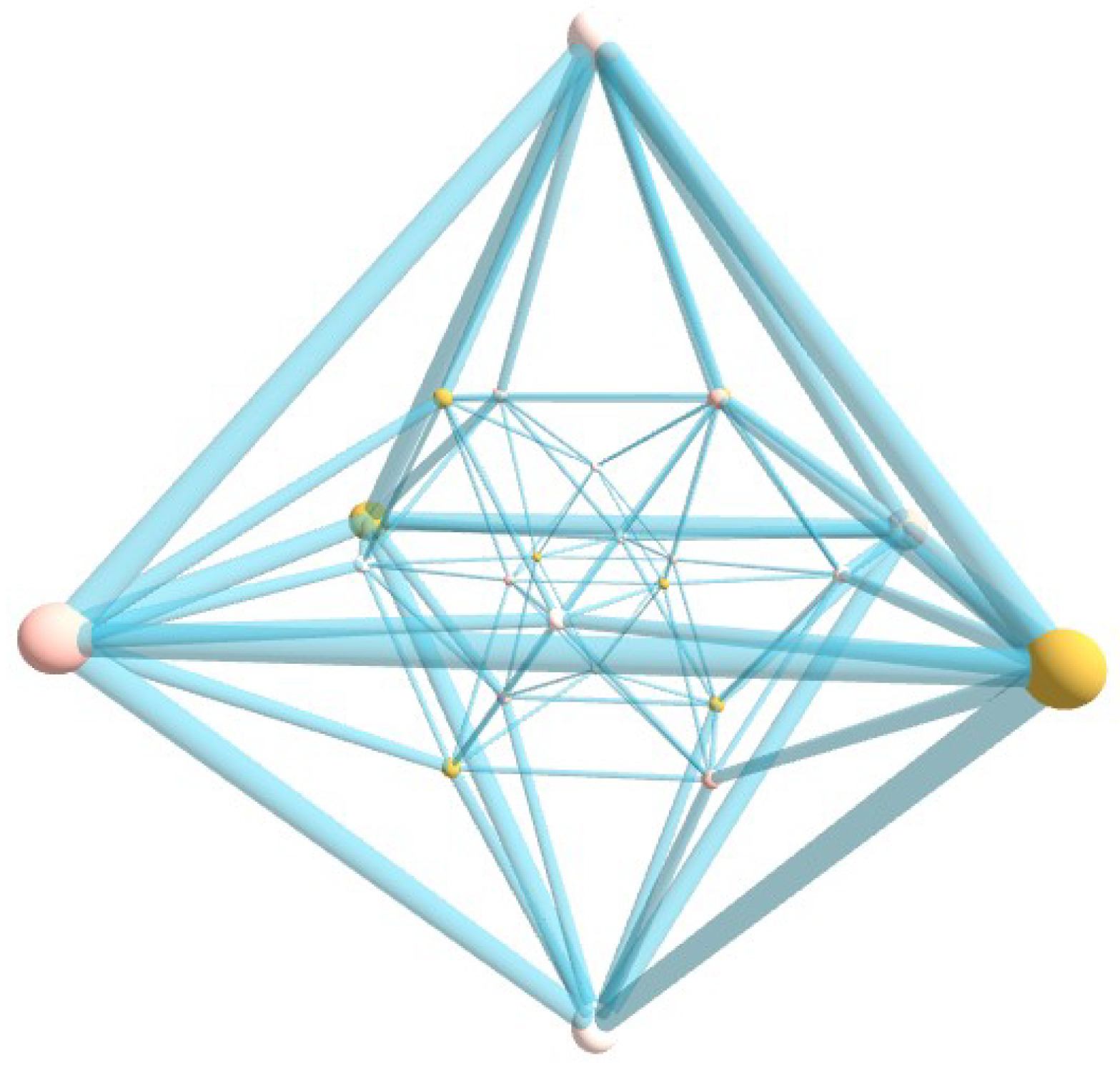
A visual perspective of the 24-cell polychoron is provided in
Figure 2 where we show its projection in 3D space.
The 24-cell does not have a regular analogue in 3D space or any other number of dimensions. Thus, it is the only one of the six convex regular polychora in 4D which is not the analogue of one of the five Platonic solids in 3D. It has
vertices and
edges. Numerical calculations show that the mininum energy is
and
. The values of the equilibrium angles are shown in
Table 6.
Some angles follow a certain pattern. For instance, we can find the relations for such as .
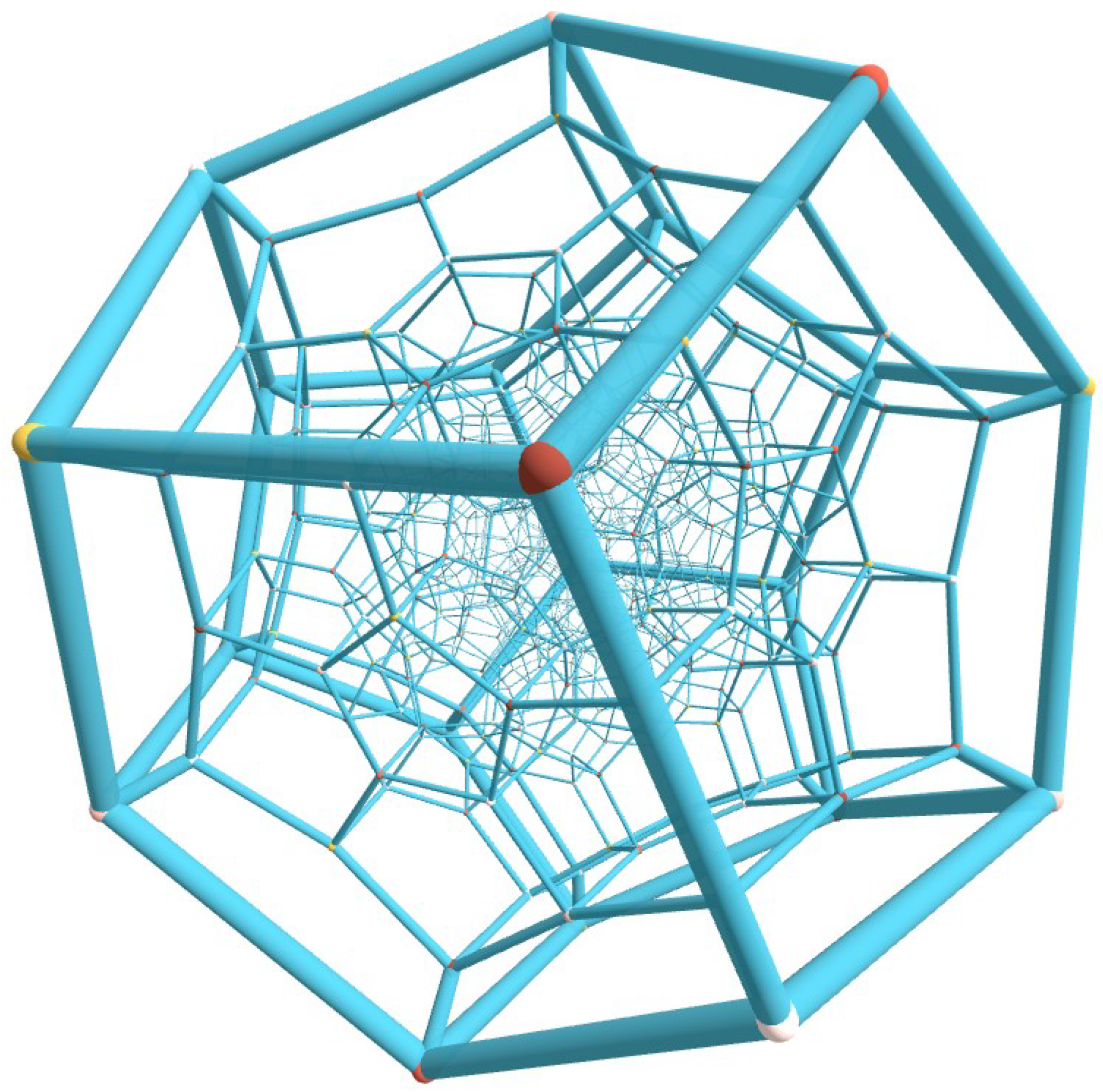
2.5. The 120-Cell
Projection of the 120-cell into
is shown in
Figure 3. The 120-cell is the 4D analogue of the dodecahedron. It consists of 120 regular dodecahedra joined at 720 regular pentagon faces, with three dodecahedra around each edge. It has
vertices and
edges.
The regular 120-cell polytope in
represents one of the most exquisite structures in mathematics. Its surface comprises 120 regular dodecahedral cells, making this configuration exceptionally rare as it naturally exists in three distinct mathematical domains: as a regular polytope in
, embedded in the remarkable sphere
, and within the quaternion space
. Notably, the 120-cell encapsulates both the icosahedral symmetry and the topological structure of the Poincaré homology sphere. Through extensive numerical minimization (involving
degrees of freedom), we obtained the following optimal values for various quantities of the interacting system:
,
, and
. These results represent the lowest energy configuration achieved without imposing constraints on either
or
. Note that the 120-cell is arguably the most complex of the six regular 4D polytopes. Therefore, even if the net moment is not exactly zero, its value (
) can be considered practically zero. Due to limited computational resources and the numerical difficulties of handling this challenging case study, we would tend to believe that
for all practical purposes. We noticed that when constraints are imposed during the optimization process, one can obtain a vanishing net moment but at the expense of a slightly higher energy. Overall, the numerical results, while computationally challenging, seem to suggest that the 120-cell configuration is not a polar molecular arrangement but rather features dipoles oriented perpendicular to their position vectors. Central projection of the 120-cell onto its circumscribed
generates a tessellation by congruent regular spherical dodecahedra. The stereographic projection preserves both spherical surfaces and angular relationships, yielding a partition of
into 120 spherical domains. These domains exhibit remarkable geometric properties: adjacent spherical surfaces intersect at
along edges, with four surfaces meeting at each vertex—a configuration analogous to soap bubble clusters and mathematically established by J. Taylor’s theorem [
33]. The values of the equilibrium angles are shown in
Table 7.
2.6. The 600-Cell
The 600-cell structure concludes our study. Projection of the 600-cell into 3D space is shown in
Figure 4. The 600-cell is the 4D analogue of the icosahedron. It consists of 600 regular tetrahedra joined at 1200 triangular faces with five tetrahedra around each edge. The number of vertices is
. Its 120 vertices can be partitioned into five sets, which form the vertices of five inscribed 24-cells.
Numerical calculation of the mininum energy resulted in
and
. The 600-cell is an object where analogies have been found in soap bubbles as well as other areas of physics. For instance, the system of 60 rays derived from the vertices of a 600-cell is used to provide proofs of the Bell–Kochen–Specker theorem, which rules out the existence of non-contextual hidden variables theories [
34].
3. Conclusions
Regular polychora are 4D analogs of the regular polyhedra, consisting of cells that are identical regular polyhedra arranged in a symmetrical, 4D structure. There are exactly six convex regular polychora each exhibiting uniformity in vertices, edges, faces, and cells. The six convex regular polychora (also known as the regular 4-polytopes) that we study in this work are as follows: (i) 5-cell (4-simplex) made of 5 tetrahedral cells; (ii) 8-cell (tesseract or hypercube) made of 8 cubic cells; (iii) 16-cell made of 16 tetrahedral cells; (iv) 24-cell made of 24 octahedral cells (unique to 4D space); (v) 120-cell made of 120 dodecahedral cells; and (vi) 600-cell made of 600 tetrahedral cells. These are the 4D analogs of the familiar Platonic solids, exhibiting perfect symmetry and regularity. The system under consideration consists of 4D dipoles placed in each vertex of the 4D structure under consideration. The dipoles are allowed to interact with the rest of the system. We numerically minimize the total interaction energy of all the systems under consideration. This way, we identify the minimum energy configurations of dipoles for the six structures that conform to the convex regular polychora. We observe that the minimum energy configuration corresponds to clusters of dipoles with a zero net dipole moment. The dipoles arrange themselves in orientations whose angles are commensurate or irrational fractions of number, .
Our detailed study reveals one important consequence of the interplay between the high degree of symmetry of these polytopes and the results of considering a physical approach. For all interacting dipoles, we do encounter that all of them are not polar clusters. That is, the vector sum of all dipoles, turns out to be zero. This result is indeed remarkable. Having zero total magnetic moment is a condition that can be achieved in many ways. Among various options, there is only one configuration up to trivial rotations, which has the lowest minimum energy possible. We hope that this contribution will inspire further research connecting high-dimensional mathematical structures with physical phenomena involving dipolar systems based on the rich array of characteristics that define regular polytopes from the perspective of geometrical symmetry.





{kind=link}
{kind=link}
{kind=link}
{kind=link}