
Understanding the Mechanism of the Structure-Dependent Mechanical Performance of Carbon-Nanotube-Based Hierarchical Networks from a Deformation Mode Perspective


Abstract
:1. Introduction
2. Materials and Methods
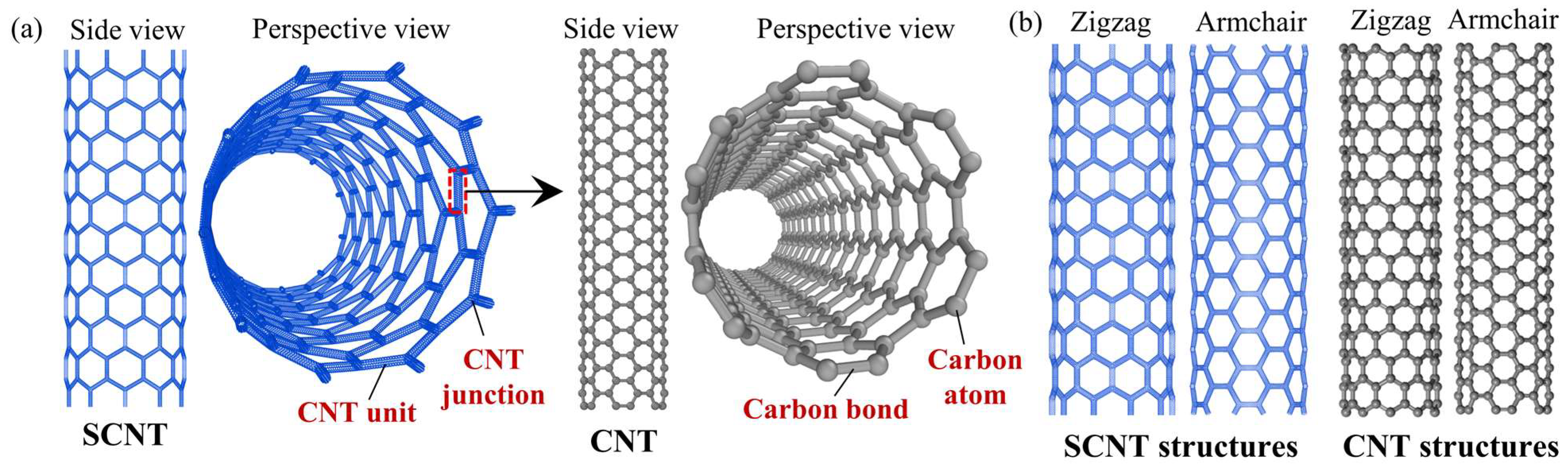
2.1. Structure of the SCNT
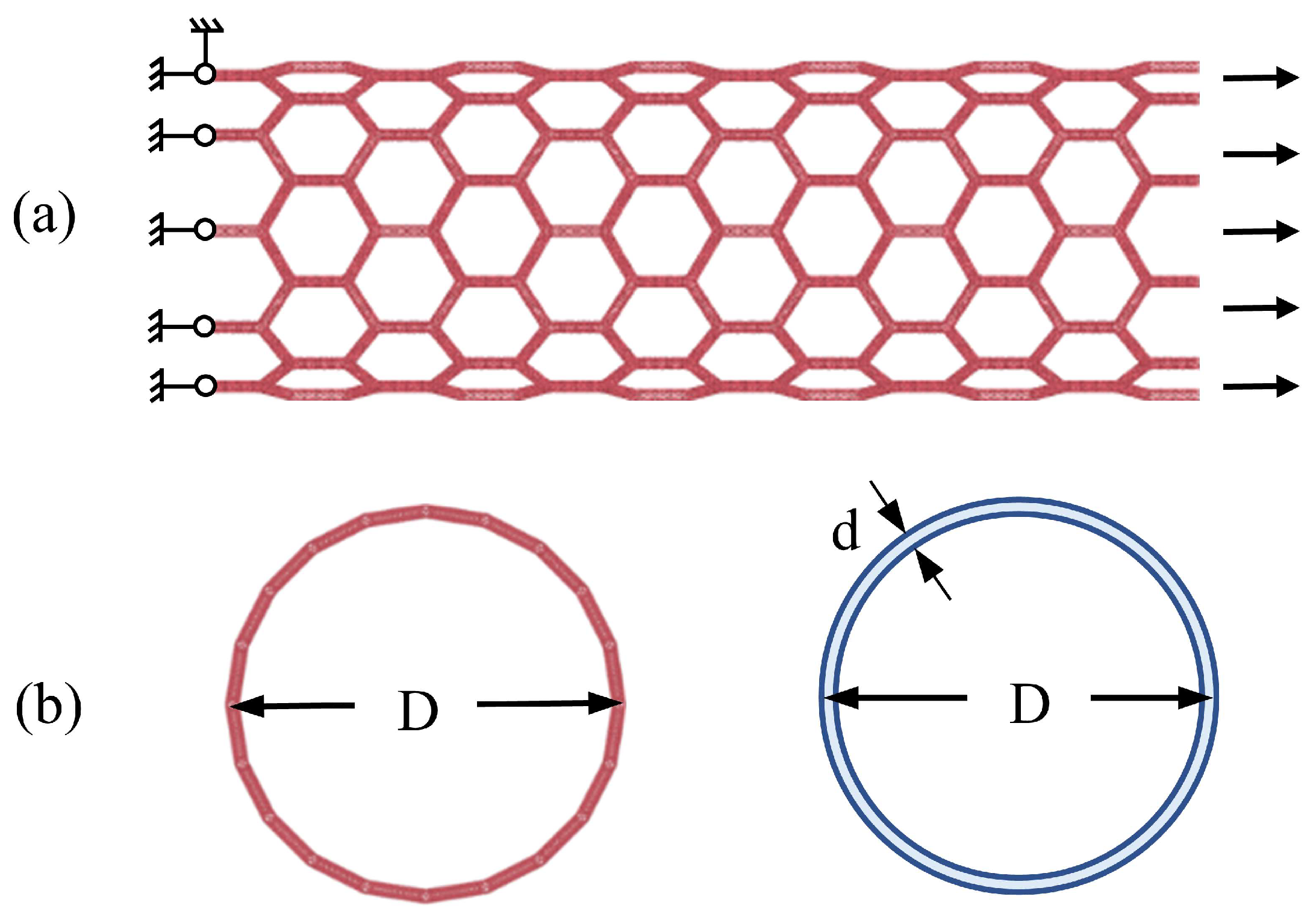
2.2. Methodology
3. Results and Discussion
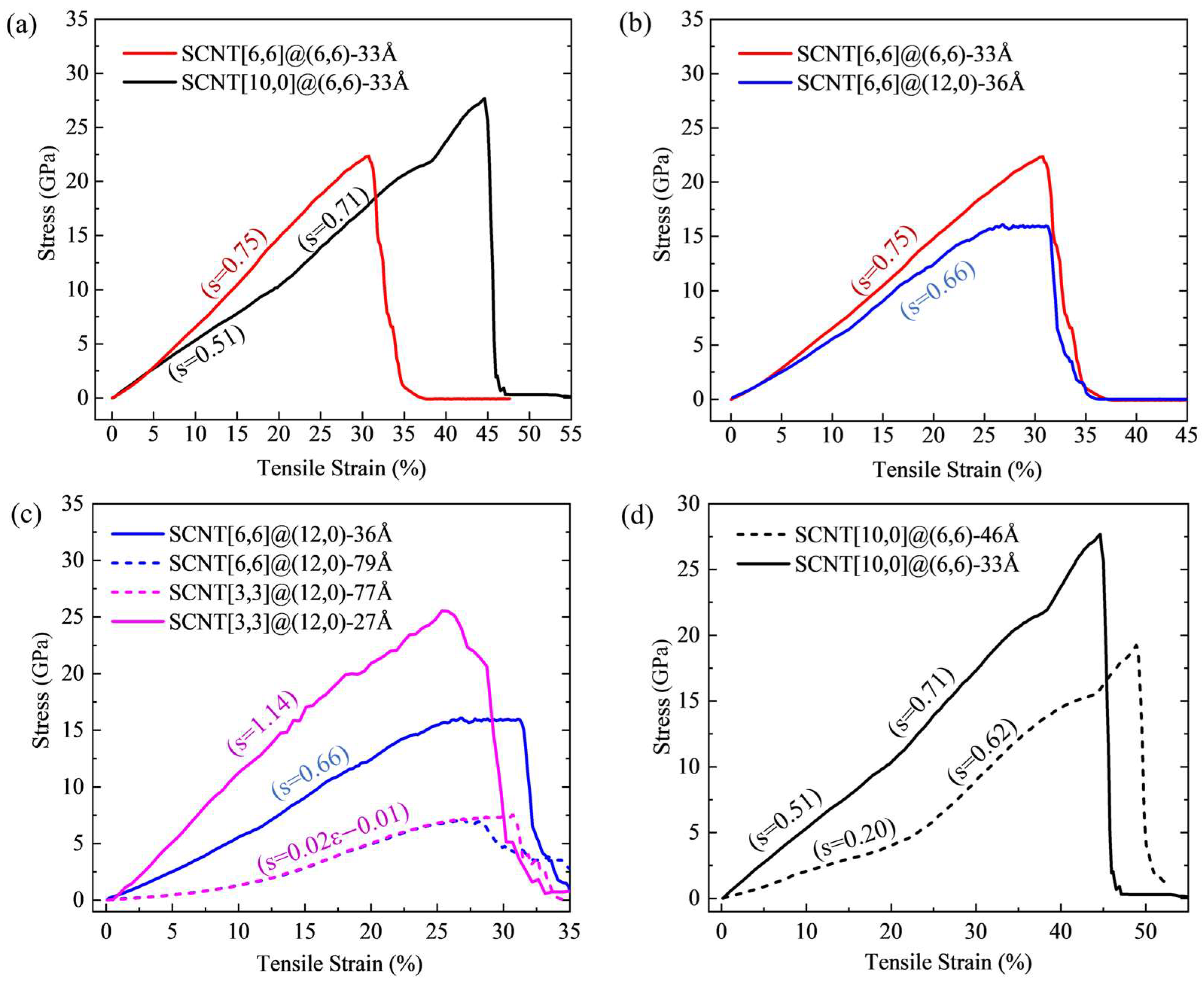
3.1. Influence of Geometrical Structure on Tensile Performances of SCNTs
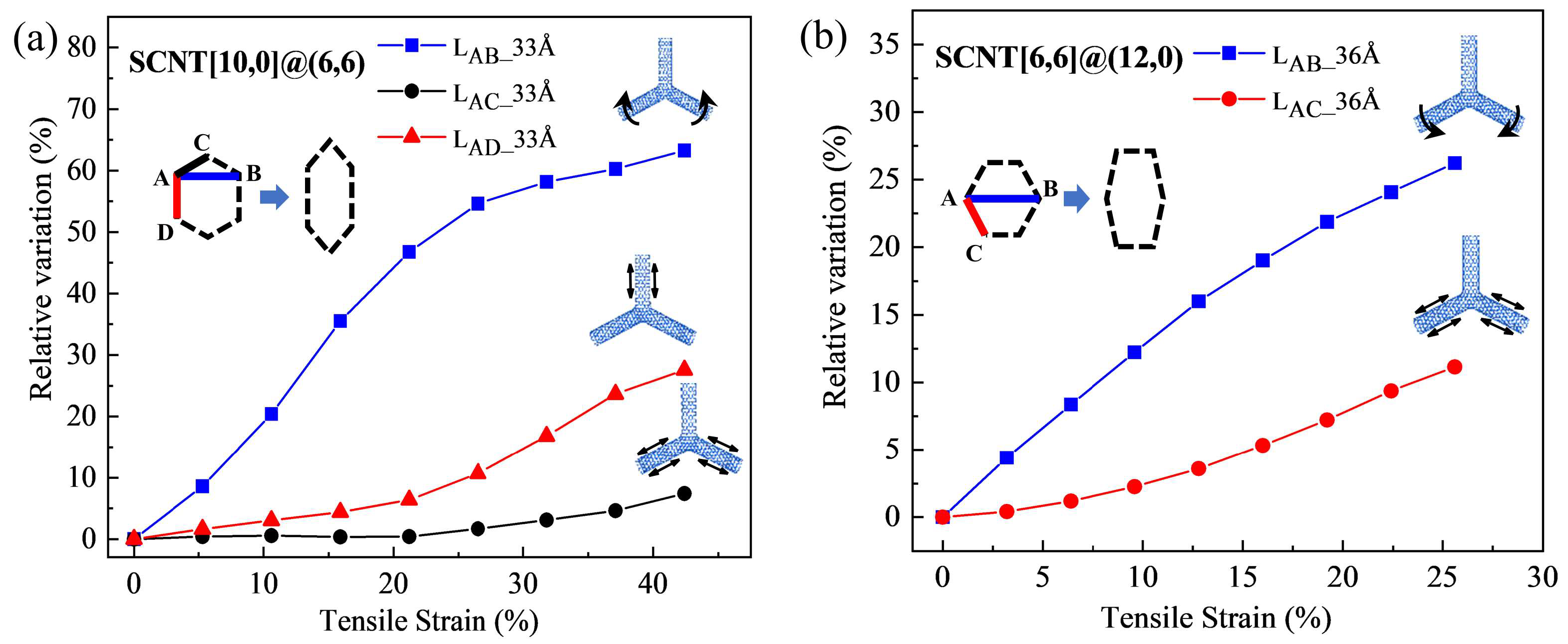
3.2. Deformation Mode Analysis for SCNTs with Different Geometrical Structures
3.3. Summary of the Structure-Dependent Performances of SCNTs and the Potential Design Strategy
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Iijima, S. Helical Microtubules of Graphitic Carbon. Nature 1991, 354, 56–58. [Google Scholar] [CrossRef]
- Iijima, S.; Ichihashi, T. Single-Shell Carbon Nanotubes of 1-Nm Diameter. Nature 1993, 363, 603–605. [Google Scholar] [CrossRef]
- Ruoff, R.S.; Lorents, D.C. Mechanical and Thermal Properties of Carbon Nanotubes. Carbon N. Y. 1995, 33, 925–930. [Google Scholar] [CrossRef]
- Charlier, J.-C.; Blase, X.; Roche, S. Electronic and Transport Properties of Nanotubes. Rev. Mod. Phys. 2007, 79, 677–732. [Google Scholar] [CrossRef]
- Pal, M.; Subhedar, K.M. CNT Yarn Based Solid State Linear Supercapacitor with Multi-Featured Capabilities for Wearable and Implantable Devices. Energy Storage Mater. 2023, 57, 136–170. [Google Scholar] [CrossRef]
- Cao, P.; Wang, H.; Zhao, L.; Zhou, Y.; Zhang, J.; Zhang, Y.; Zheng, L.; Li, Q. Robust, Amphiphobic and Super-Buoyant CNT Foams Promising for Self-Floating Functional Platforms. Carbon N. Y. 2020, 168, 439–447. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G. Carbon Nanotube and Graphene Fiber Artificial Muscles. Nanoscale Adv. 2019, 1, 4592–4614. [Google Scholar] [CrossRef]
- Sarac, B.; Gürbüz, R.; Micusik, M.; Omastova, M.; Rezvan, A.; Yüce, E.; Xi, L.; Eckert, J.; Ozcan, A.; Sarac, A.S. Styrene–Butadiene–Styrene-Based Stretchable Electrospun Nanofibers by Carbon Nanotube Inclusion. Mol. Syst. Des. Eng. 2023, 8, 911–921. [Google Scholar] [CrossRef]
- Wei, M.; Zhu, H.; Zhai, P.; An, L.; Geng, H.; Xu, S.; Zhang, T. Nano-Sulfur Confined in a 3D Carbon Nanotube/Graphene Network as a Free-Standing Cathode for High-Performance Li–S Batteries. Nanoscale Adv. 2022, 4, 4809–4818. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, W.; Zhou, G.; Li, Q. Understanding the Mechanical and Conductive Properties of Carbon Nanotube Fibers for Smart Electronics. Adv. Mater. 2020, 32, 1902028. [Google Scholar] [CrossRef]
- Song, C.K.; Oh, E.; Kang, M.S.; Shin, B.S.; Han, S.Y.; Jung, M.; Lee, E.S.; Yoon, S.-Y.; Sung, M.M.; Ng, W.B.; et al. Fluorescence-Based Immunosensor Using Three-Dimensional CNT Network Structure for Sensitive and Reproducible Detection of Oral Squamous Cell Carcinoma Biomarker. Anal. Chim. Acta 2018, 1027, 101–108. [Google Scholar] [CrossRef]
- Yu, R.; Fan, W.; Guo, X.; Dong, S. Highly Ordered and Ultra-Long Carbon Nanotube Arrays as Air Cathodes for High-Energy-Efficiency Li-Oxygen Batteries. J. Power Sources 2016, 306, 402–407. [Google Scholar] [CrossRef]
- Xiong, L.; Shuai, J.; Liu, K.; Hou, Z.; Zhu, L.; Li, W. Enhanced Mechanical and Electrical Properties of Super-Aligned Carbon Nanotubes Reinforced Copper by Severe Plastic Deformation. Compos. Part B Eng. 2019, 160, 315–320. [Google Scholar] [CrossRef]
- Zhao, W.; Shan, C.; Elias, A.L.; Rajukumar, L.P.; O’Brien, D.J.; Terrones, M.; Wei, B.; Suhr, J.; Lu, X.L. Hyperelasticity of Three-Dimensional Carbon Nanotube Sponge Controlled by the Stiffness of Covalent Junctions. Carbon N. Y. 2015, 95, 640–645. [Google Scholar] [CrossRef]
- Li, X.; Wu, B.; Chen, P.; Xia, R.; Qian, J. Covalently Interconnected Carbon Nanotubes Network Enhancing Thermal Conductivity of EP-Based Composite. Compos. Commun. 2023, 40, 101591. [Google Scholar] [CrossRef]
- Dasgupta, A.; Rajukumar, L.P.; Rotella, C.; Lei, Y.; Terrones, M. Covalent Three-Dimensional Networks of Graphene and Carbon Nanotubes: Synthesis and Environmental Applications. Nano Today 2017, 12, 116–135. [Google Scholar] [CrossRef]
- Meng, G.; Jung, Y.J.; Cao, A.; Vajtai, R.; Ajayan, P.M. Controlled Fabrication of Hierarchically Branched Nanopores, Nanotubes, and Nanowires. Proc. Natl. Acad. Sci. USA 2005, 102, 7074–7078. [Google Scholar] [CrossRef]
- Sanchez-Valencia, J.R.; Dienel, T.; Gröning, O.; Shorubalko, I.; Mueller, A.; Jansen, M.; Amsharov, K.; Ruffieux, P.; Fasel, R. Controlled Synthesis of Single-Chirality Carbon Nanotubes. Nature 2014, 512, 61–64. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Zhao, Z.; Niu, J.; Xia, Z. Synthesis, Properties and Applications of 3D Carbon Nanotube–Graphene Junctions. J. Phys. D Appl. Phys. 2016, 49, 443001. [Google Scholar] [CrossRef]
- Varshney, V.; Unnikrishnan, V.; Lee, J.; Roy, A.K. Developing Nanotube Junctions with Arbitrary Specifications. Nanoscale 2018, 10, 403–415. [Google Scholar] [CrossRef]
- Fu, Y.; Carlberg, B.; Lindahl, N.; Lindvall, N.; Bielecki, J.; Matic, A.; Song, Y.; Hu, Z.; Lai, Z.; Ye, L.; et al. Templated Growth of Covalently Bonded Three-Dimensional Carbon Nanotube Networks Originated from Graphene. Adv. Mater. 2012, 24, 1576–1581. [Google Scholar] [CrossRef]
- Xu, Q.; Meng, G.; Han, F. Porous AAO Template-Assisted Rational Synthesis of Large-Scale 1D Hybrid and Hierarchically Branched Nanoarchitectures. Prog. Mater. Sci. 2018, 95, 243–285. [Google Scholar] [CrossRef]
- Ohtake, T. Bottom-up Approaches for Material and Device Designing Using Practical Aspects of Self-Assembled Molecular Architectures. Mol. Syst. Des. Eng. 2018, 3, 804–818. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, J.; Mei, H.; Wei, F.; He, X.; Mei, X. A Programmable Multiscale Assembly Strategy of Carbon Nanotubes for Honeycomb-like Networks. Carbon N. Y. 2022, 198, 110–118. [Google Scholar] [CrossRef]
- Wu, Y.; Zhao, X.; Shang, Y.; Chang, S.; Dai, L.; Cao, A. Application-Driven Carbon Nanotube Functional Materials. ACS Nano 2021, 15, 7946–7974. [Google Scholar] [CrossRef]
- Romo-Herrera, J.M.; Terrones, M.; Terrones, H.; Dag, S.; Meunier, V. Covalent 2D and 3D Networks from 1D Nanostructures: Designing New Materials. Nano Lett. 2007, 7, 570–576. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, N.; He, C. The Superior Mechanical and Physical Properties of Nanocarbon Reinforced Bulk Composites Achieved by Architecture Design—A Review. Prog. Mater. Sci. 2020, 113, 100672. [Google Scholar] [CrossRef]
- Li, C.; Chou, T.-W. A Structural Mechanics Approach for the Analysis of Carbon Nanotubes. Int. J. Solids Struct. 2003, 40, 2487–2499. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Z. Mechanical Property Evaluation of Single-Walled Carbon Nanotubes by Finite Element Modeling. Compos. Part B Eng. 2012, 43, 1902–1913. [Google Scholar] [CrossRef]
- Liew, K.M.; He, X.Q.; Wong, C.H. On the Study of Elastic and Plastic Properties of Multi-Walled Carbon Nanotubes under Axial Tension Using Molecular Dynamics Simulation. Acta Mater. 2004, 52, 2521–2527. [Google Scholar] [CrossRef]
- Baykasoglu, C.; Ozturk, Z.; Kirca, M.; Celebi, A.T.; Mugan, A.; To, A.C. Effects of Lithium Doping on Hydrogen Storage Properties of Heat Welded Random CNT Network Structures. Int. J. Hydrogen Energy 2016, 41, 8246–8255. [Google Scholar] [CrossRef]
- Kayang, K.W.; Banna, A.H.; Volkov, A.N. Chirality-Dependent Mechanical Properties of Bundles and Thin Films Composed of Covalently Cross-Linked Carbon Nanotubes. Langmuir 2022, 38, 1977–1994. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Xu, K.; Cao, X.; Zhang, Z.; Wu, J. Role of Nanotube Chirality on the Mechanical Characteristics of Pillared Graphene. Mech. Mater. 2021, 162, 104035. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, Y.; Wang, F.; Liu, X.; Wu, H. Super-Elasticity and Deformation Mechanism of Three-Dimensional Pillared Graphene Network Structures. Carbon N. Y. 2017, 118, 588–596. [Google Scholar] [CrossRef]
- Coluci, V.R.; Pugno, N.M.; Dantas, S.O.; Galvão, D.S.; Jorio, A. Atomistic Simulations of the Mechanical Properties of ‘Super’ Carbon Nanotubes. Nanotechnology 2007, 18, 335702. [Google Scholar] [CrossRef]
- Zhan, H.; Bell, J.M.; Gu, Y. Carbon Nanotube-Based Super Nanotubes: Tunable Thermal Conductivity in Three Dimensions. RSC Adv. 2015, 5, 48164–48168. [Google Scholar] [CrossRef]
- Wang, M.; Qiu, X.; Zhang, X. Mechanical Properties of Super Honeycomb Structures Based on Carbon Nanotubes. Nanotechnology 2007, 18, 75711. [Google Scholar] [CrossRef]
- Wei, D.; Liu, Y. The Intramolecular Junctions of Carbon Nanotubes. Adv. Mater. 2008, 20, 2815–2841. [Google Scholar] [CrossRef]
- Xue, B.; Shao, X.; Cai, W. Structures and Stabilities of Multi-Terminal Carbon Nanotube Junctions. Comput. Mater. Sci. 2008, 43, 531–539. [Google Scholar] [CrossRef]
- Torkaman-Asadi, M.A.; Kouchakzadeh, M.A. Atomistic Simulations of Mechanical Properties and Fracture of Graphene: A Review. Comput. Mater. Sci. 2022, 210, 111457. [Google Scholar] [CrossRef]
- Brenner, D.W.; Shenderova, O.A.; Harrison, J.A.; Stuart, S.J.; Ni, B.; Sinnott, S.B. A Second-Generation Reactive Empirical Bond Order (REBO) Potential Energy Expression for Hydrocarbons. J. Phys. Condens. Matter 2002, 14, 783. [Google Scholar] [CrossRef]
- Memarian, F.; Fereidoon, A.; Darvish Ganji, M. Graphene Young’s Modulus: Molecular Mechanics and DFT Treatments. Superlattices Microstruct. 2015, 85, 348–356. [Google Scholar] [CrossRef]
- Liu, J.; Qin, H.; Liu, Y. Multi-Scale Structure–Mechanical Property Relations of Graphene-Based Layer Materials. Materials 2021, 14, 4757. [Google Scholar] [CrossRef]
- O’Connor, T.C.; Andzelm, J.; Robbins, M.O. AIREBO-M: A Reactive Model for Hydrocarbons at Extreme Pressures. J. Chem. Phys. 2015, 142, 024903. [Google Scholar] [CrossRef]
- Orekhov, N.; Ostroumova, G.; Stegailov, V. High Temperature Pure Carbon Nanoparticle Formation: Validation of AIREBO and ReaxFF Reactive Molecular Dynamics. Carbon N. Y. 2020, 170, 606–620. [Google Scholar] [CrossRef]
- Wang, G.; Hou, H.; Yan, Y.; Jagatramka, R.; Shirsalimian, A.; Wang, Y.; Li, B.; Daly, M.; Cao, C. Recent Advances in the Mechanics of 2D Materials. Int. J. Extrem. Manuf. 2023, 5, 32002. [Google Scholar] [CrossRef]
- Plimpton, S. Fast Parallel Algorithms for Short-Range Molecular Dynamics. J. Comput. Phys. 1995, 117, 1–19. [Google Scholar] [CrossRef]
- Nosé, S. A Molecular Dynamics Method for Simulations in the Canonical Ensemble. Mol. Phys. 1984, 52, 255–268. [Google Scholar] [CrossRef]
- Qin, Z.; Feng, X.; Zou, J.; Yin, Y.; Yu, S. Molecular Dynamics Simulations of Deformation and Rupture of Super Carbon Nanotubes Under Tension. J. Nanosci. Nanotechnol. 2008, 8, 6274–6282. [Google Scholar] [CrossRef] [PubMed]
- Celebi, A.T.; Kirca, M.; Baykasoglu, C.; Mugan, A.; To, A.C. Tensile Behavior of Heat Welded CNT Network Structures. Comput. Mater. Sci. 2014, 88, 14–21. [Google Scholar] [CrossRef]
- Jensen, B.D.; Wise, K.E.; Odegard, G.M. The Effect of Time Step, Thermostat, and Strain Rate on ReaxFF Simulations of Mechanical Failure in Diamond, Graphene, and Carbon Nanotube. J. Comput. Chem. 2015, 36, 1587–1596. [Google Scholar] [CrossRef]
- Cao, K.; Feng, S.; Han, Y.; Gao, L.; Hue Ly, T.; Xu, Z.; Lu, Y. Elastic Straining of Free-Standing Monolayer Graphene. Nat. Commun. 2020, 11, 284. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Jiang, H.; Shi, D.-L.; Feng, X.-Q.; Huang, Y.; Yu, M.-F.; Hwang, K.-C. Stone–Wales Transformation: Precursor of Fracture in Carbon Nanotubes. Int. J. Mech. Sci. 2006, 48, 1464–1470. [Google Scholar] [CrossRef]
- Li, Y.; Qiu, X.; Yin, Y.; Yang, F.; Fan, Q. The Elastic Buckling of Super-Graphene and Super-Square Carbon Nanotube Networks. Phys. Lett. A 2010, 374, 1773–1778. [Google Scholar] [CrossRef]
- Liang, H.; Wang, Q.; Pu, Y.; Zhao, Y.; Ma, F. In-Plane Compressive Behavior of a Novel Self-Similar Hierarchical Honeycomb with Design-Oriented Crashworthiness. Int. J. Mech. Sci. 2021, 209, 106723. [Google Scholar] [CrossRef]
- Zhan, C.; Li, M.; McCoy, R.; Zhao, L.; Lu, W. 3D Printed Hierarchical Re-Entrant Honeycombs: Enhanced Mechanical Properties and the Underlying Deformation Mechanisms. Compos. Struct. 2022, 290, 115550. [Google Scholar] [CrossRef]
- Balawi, S.; Abot, J.L. The Effect of Honeycomb Relative Density on Its Effective In-Plane Elastic Moduli: An Experimental Study. Compos. Struct. 2008, 84, 293–299. [Google Scholar] [CrossRef]
- Guo, L.; Wang, H.; Li, W.; Zhang, M.; Qiu, Y.; Liu, Z.; Zhang, Z. Multi-Scale Damage Modeling and out-of-Plane Shear Behavior of Carbon/Carbon Honeycomb Structure. Thin-Walled Struct. 2023, 192, 111103. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCNT Models | CNT | SCNT | ||||
|---|---|---|---|---|---|---|
| Diameter (Å) | Length (Å) | Aspect Ratio | Diameter (Å) | Length (Å) | Aspect Ratio | |
| [10,0]@(6,6)-46Å | 8.14 | 46.36 | 5.70 | 255.60 | 759.06 | 2.97 |
| [10,0]@(6,6)-33Å | 8.14 | 32.65 | 4.01 | 180.01 | 526.46 | 2.92 |
| [6,6]@(6,6)-33Å | 8.14 | 33.06 | 4.06 | 189.42 | 597.31 | 3.15 |
| [6,6]@(12,0)-36Å | 9.40 | 36.13 | 3.84 | 207.01 | 624.64 | 3.02 |
| [6,6]@(12,0)-79Å | 9.40 | 79.28 | 8.43 | 454.24 | 1156.76 | 2.55 |
| [3,3]@(12,0)-77Å | 9.40 | 76.79 | 8.17 | 219.99 | 646.85 | 2.94 |
| [3,3]@(12,0)-27Å | 9.40 | 26.71 | 2.84 | 76.52 | 205.26 | 2.68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; He, X.; Liu, X. Understanding the Mechanism of the Structure-Dependent Mechanical Performance of Carbon-Nanotube-Based Hierarchical Networks from a Deformation Mode Perspective. Nanomaterials 2023, 13, 3119. https://doi.org/10.3390/nano13243119
Shi X, He X, Liu X. Understanding the Mechanism of the Structure-Dependent Mechanical Performance of Carbon-Nanotube-Based Hierarchical Networks from a Deformation Mode Perspective. Nanomaterials. 2023; 13(24):3119. https://doi.org/10.3390/nano13243119
Chicago/Turabian StyleShi, Xian, Xiaoqiao He, and Xuefeng Liu. 2023. "Understanding the Mechanism of the Structure-Dependent Mechanical Performance of Carbon-Nanotube-Based Hierarchical Networks from a Deformation Mode Perspective" Nanomaterials 13, no. 24: 3119. https://doi.org/10.3390/nano13243119
APA StyleShi, X., He, X., & Liu, X. (2023). Understanding the Mechanism of the Structure-Dependent Mechanical Performance of Carbon-Nanotube-Based Hierarchical Networks from a Deformation Mode Perspective. Nanomaterials, 13(24), 3119. https://doi.org/10.3390/nano13243119