Evaluation of a Near-Wall-Modeled Large Eddy Lattice Boltzmann Method for the Analysis of Complex Flows Relevant to IC Engines

 , , , , , , and
, , , , , , and
Abstract
1. Introduction
2. Applied Modeling Approaches
2.1. Filtered Navier–Stokes Equations
2.1.1. Finite Volume Method
2.1.2. Lattice Boltzmann Method
2.2. Sub-Grid Scale Modeling
2.2.1. SGS Model for Finite Volume Method
2.2.2. SGS Model for Lattice Boltzmann Method
2.3. Wall Function Approach
2.3.1. Wall Function for Finite Volume Method
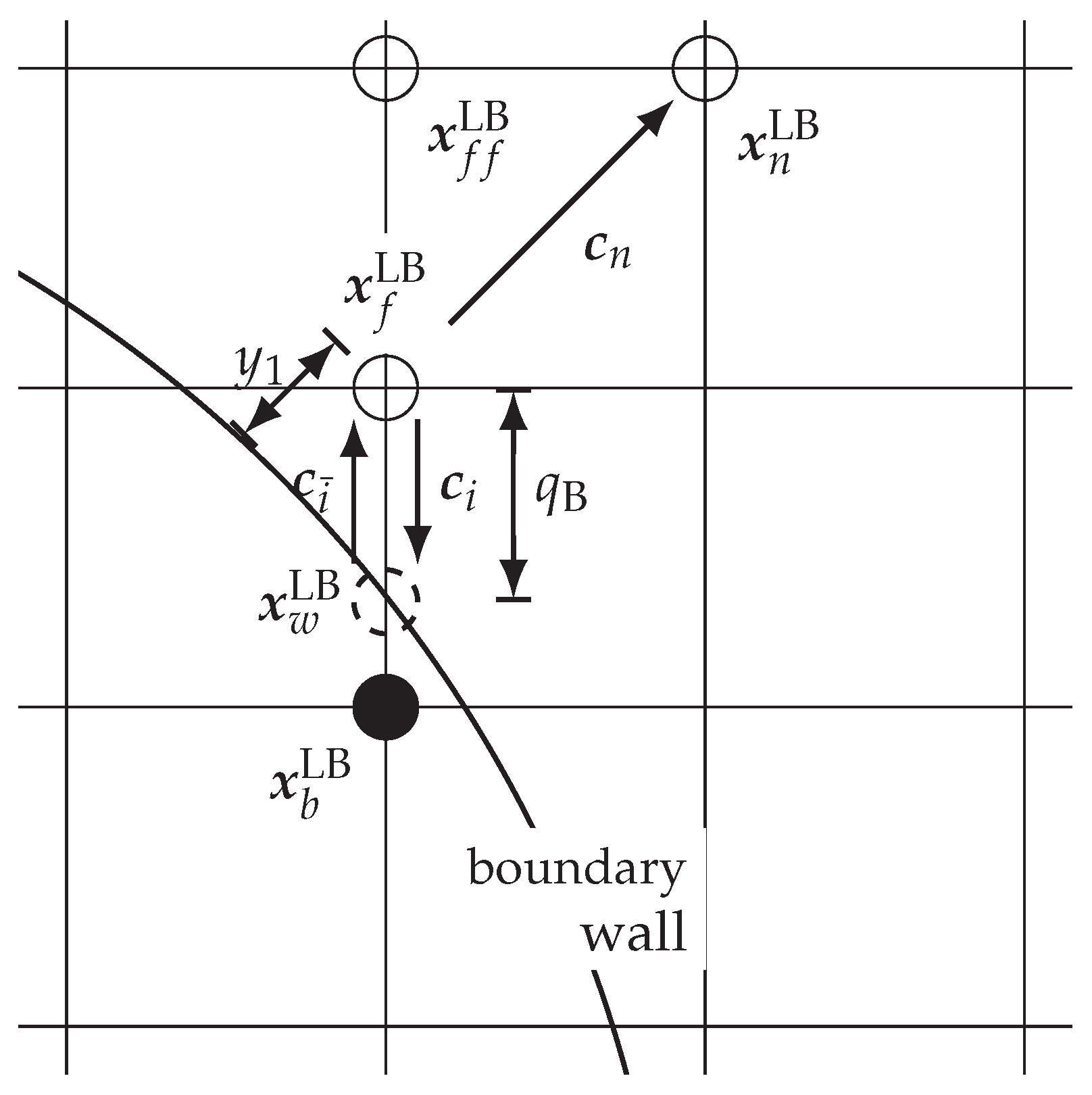
2.3.2. Wall Function for Lattice Boltzmann Method
Curved Boundary Step
Velocity Correction Step
3. Setup of the IC Engine Test Case
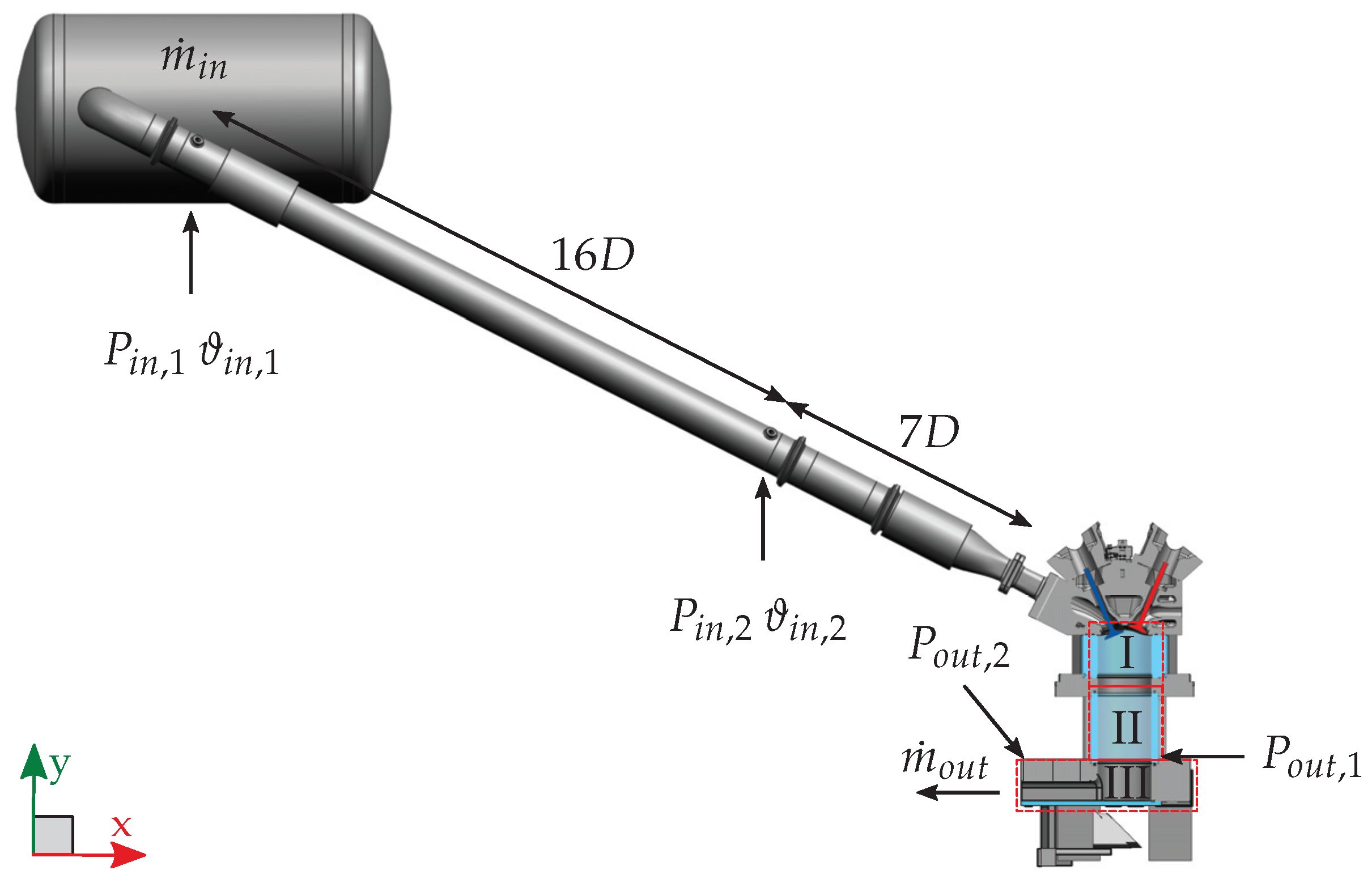
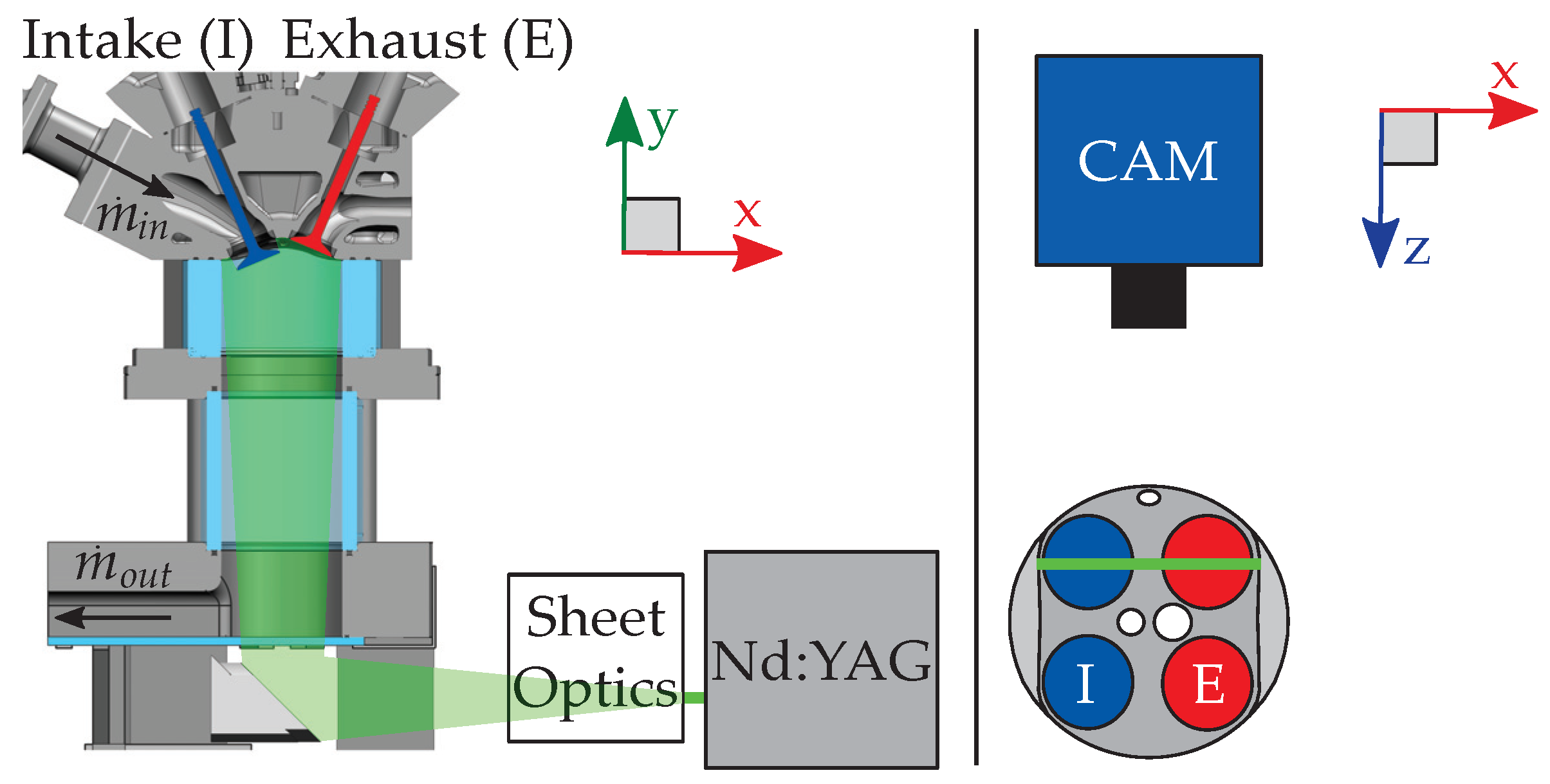
3.1. Experimental Setup
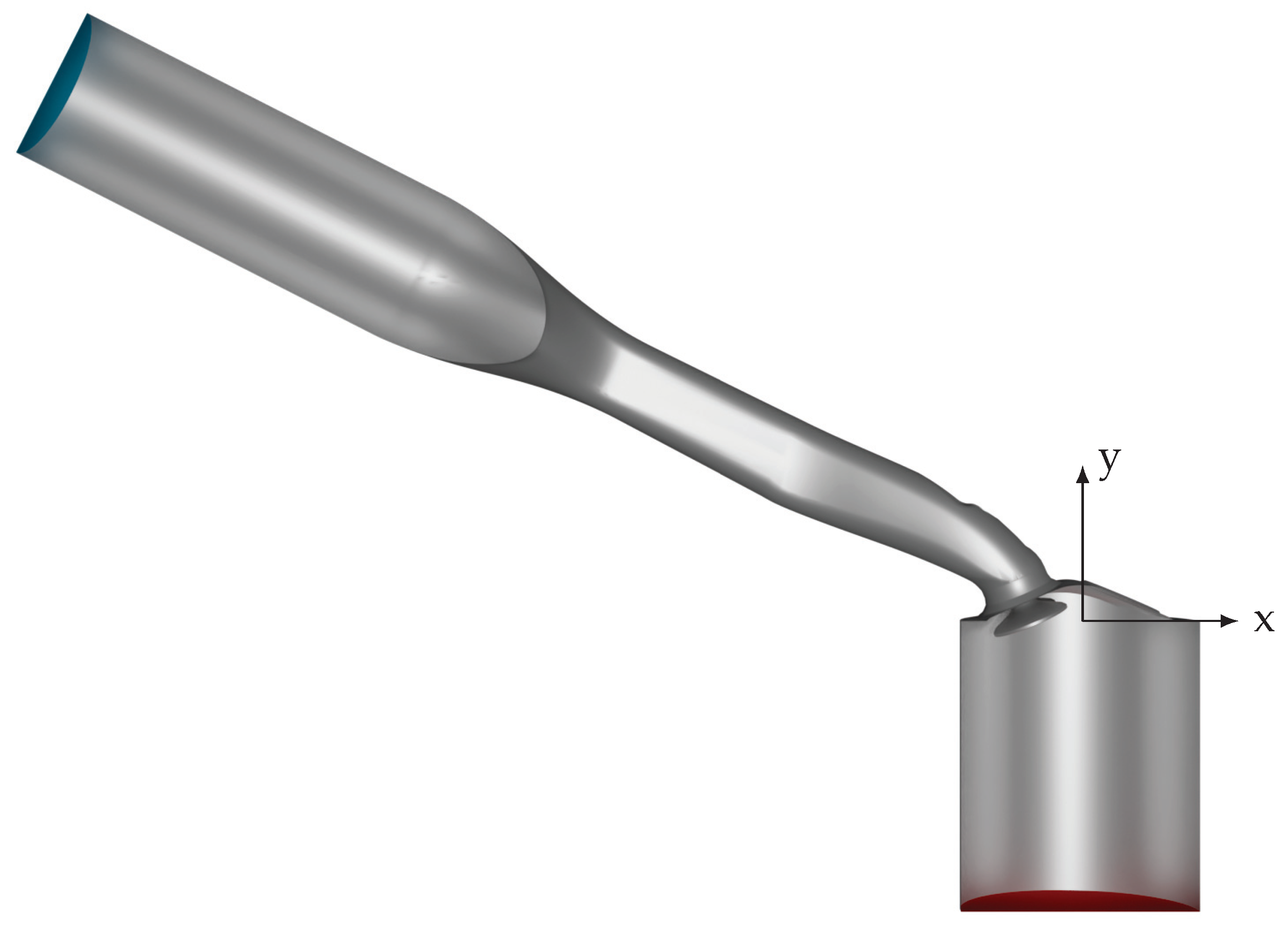
3.2. Numerical Setup
3.3. Boundary Conditions and Initial Conditions
3.3.1. Finite Volume Method
3.3.2. Lattice Boltzmann Method
3.4. Statistics
3.4.1. Finite Volume Method
3.4.2. Lattice Boltzmann Method
3.5. Grid Configurations
4. Results of the IC Engine Test Case
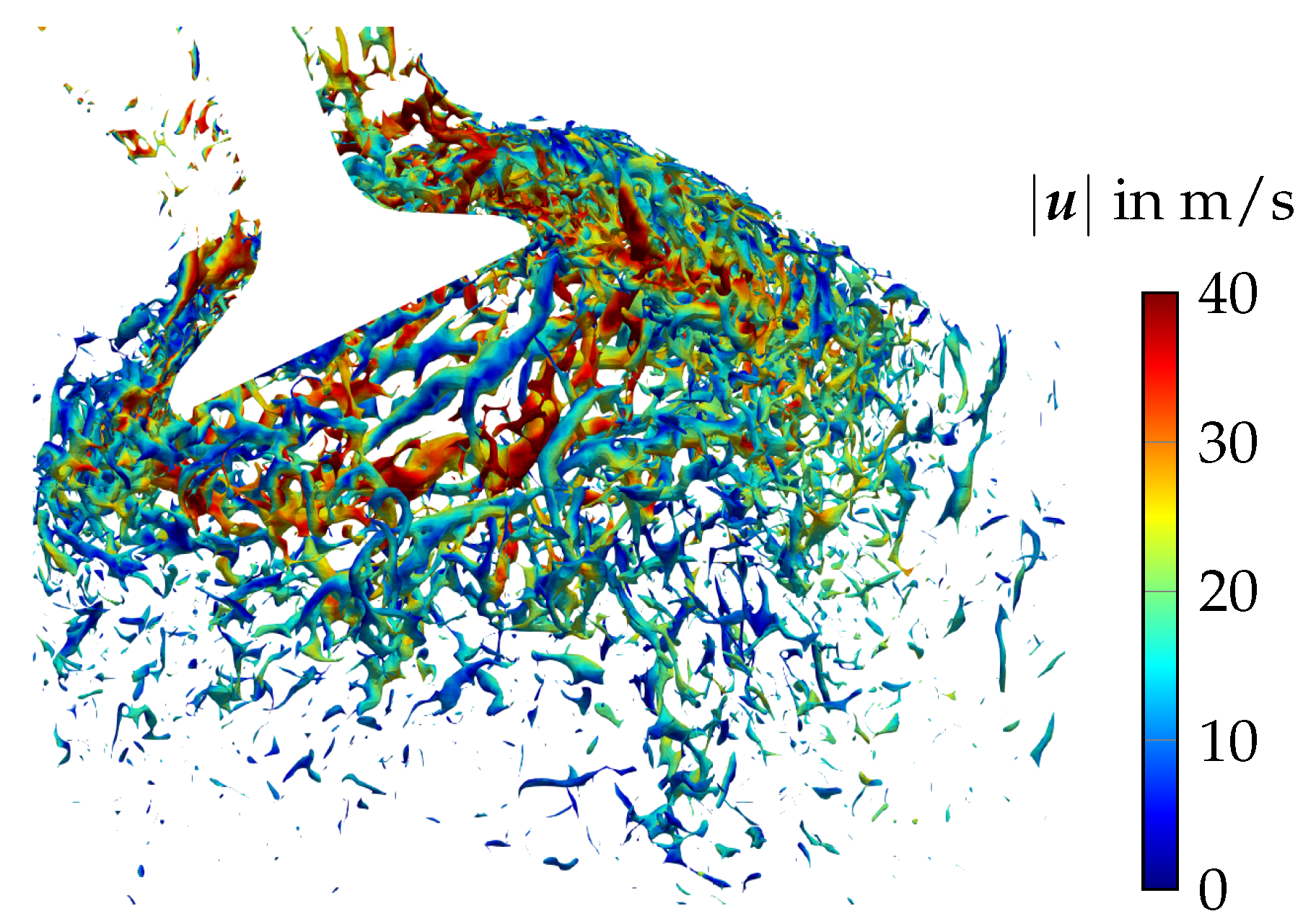
4.1. Characterization of the In-Cylinder Flow
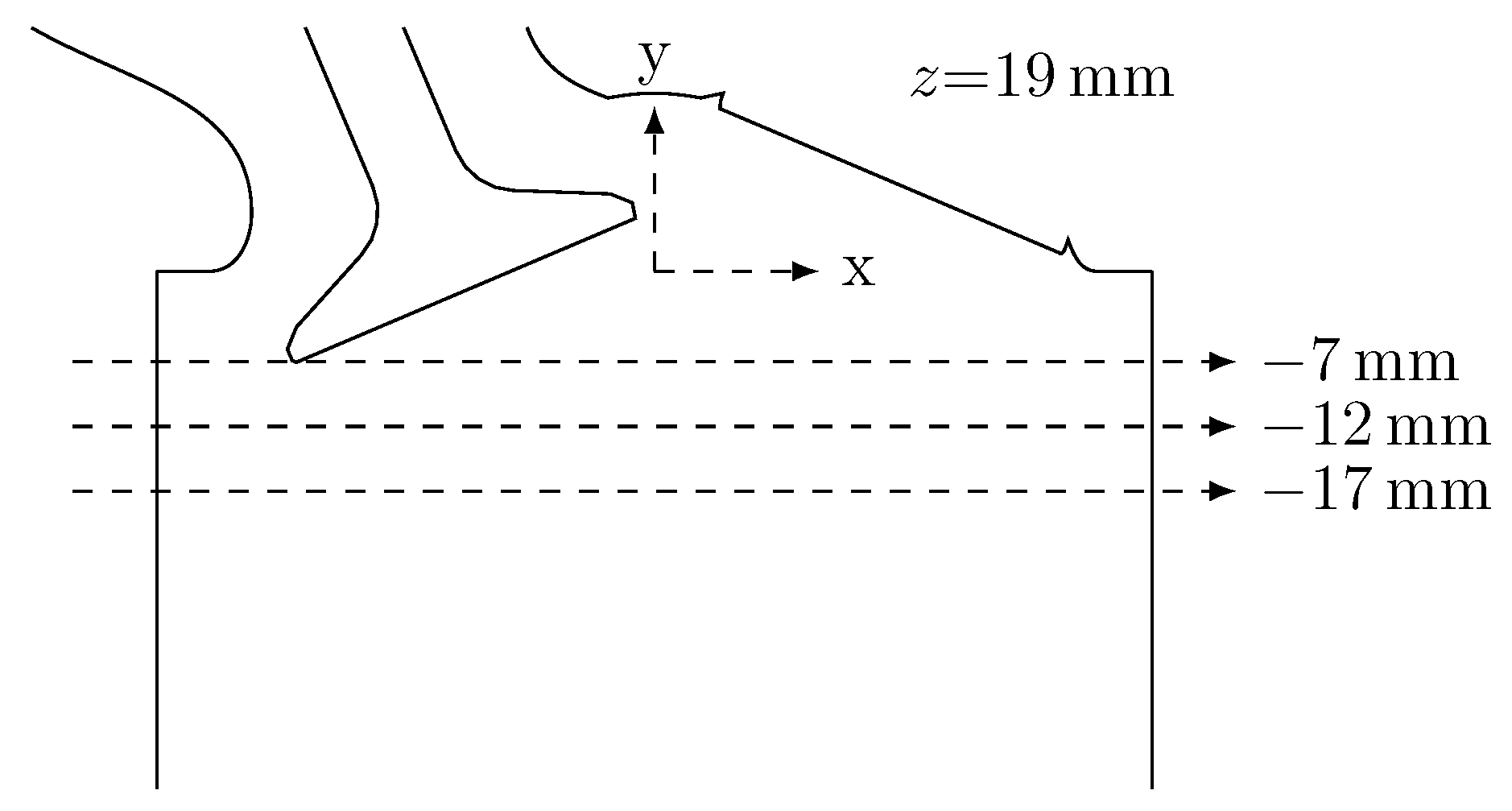
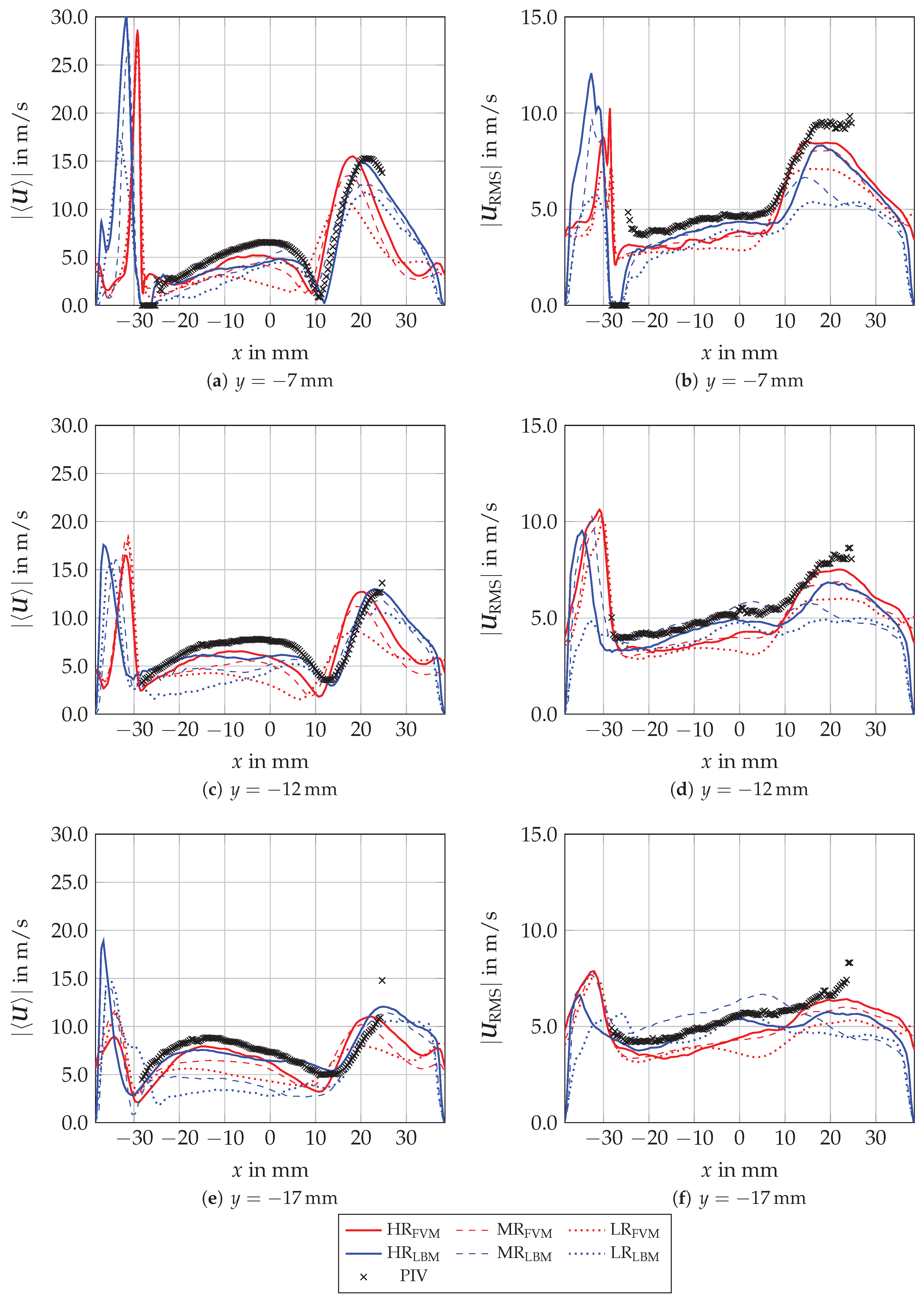
4.2. Validation of In-Cylinder Fluid Flow
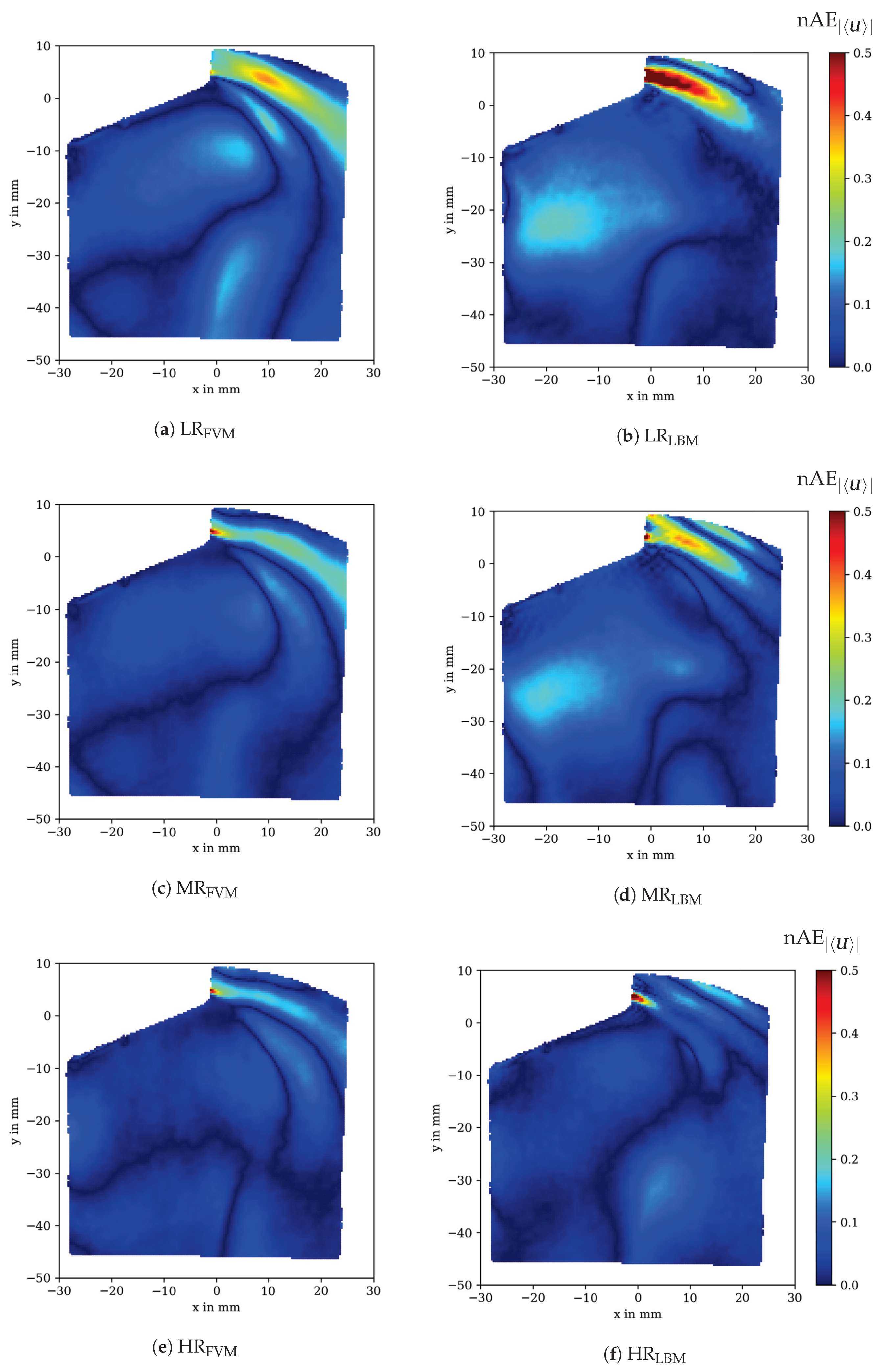
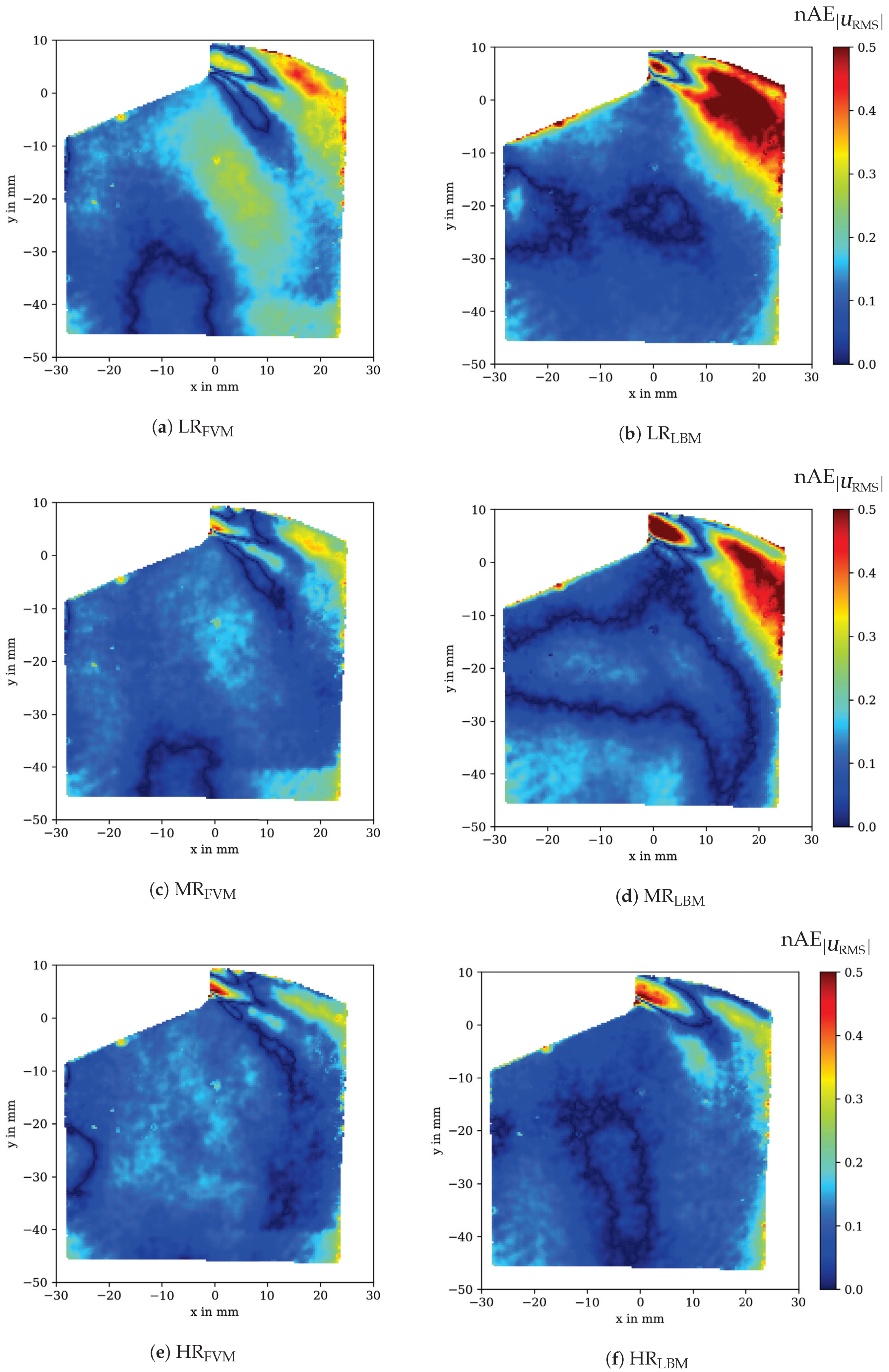
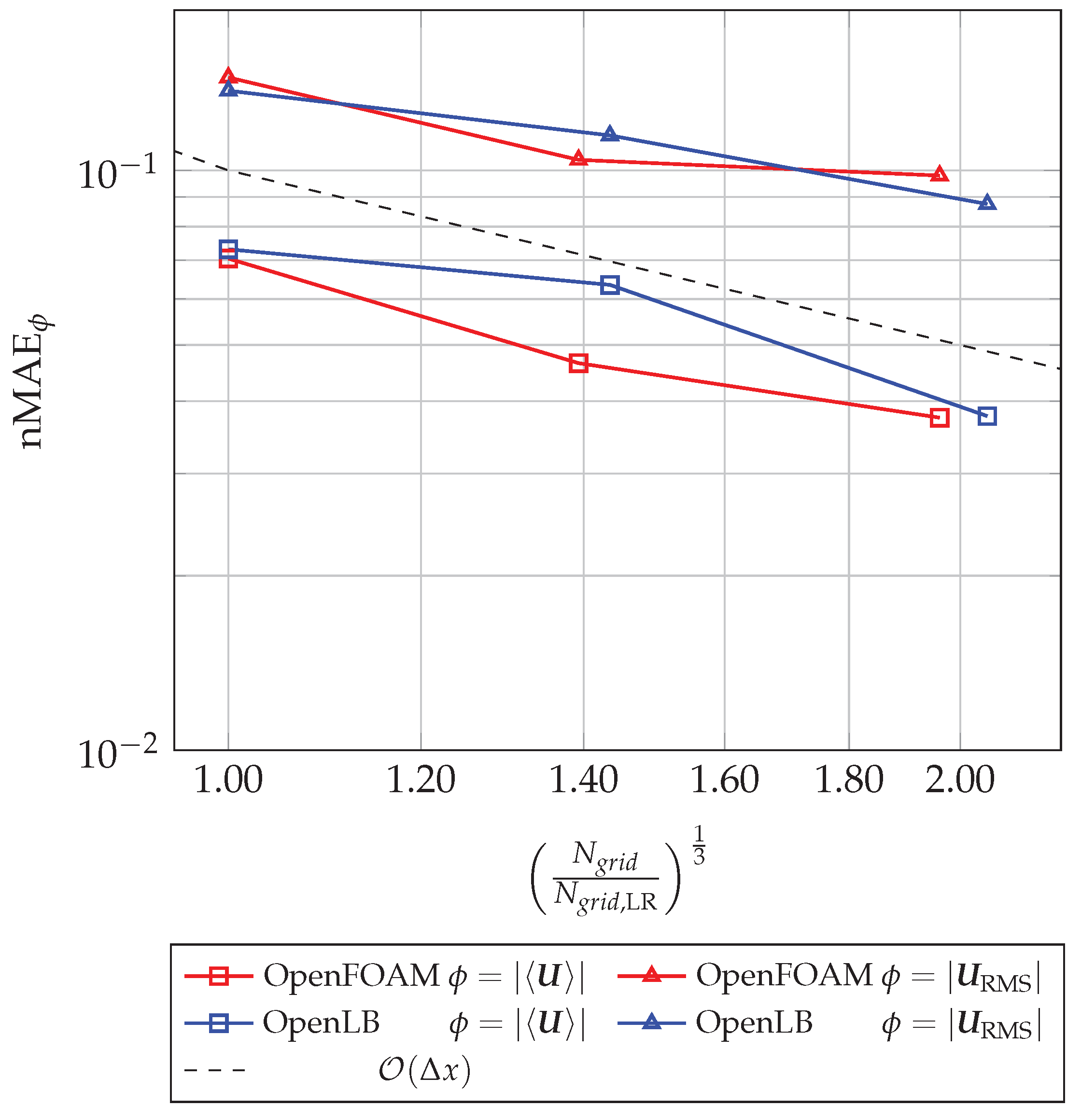
4.3. Prediction Accuracy
4.4. Computational Cost
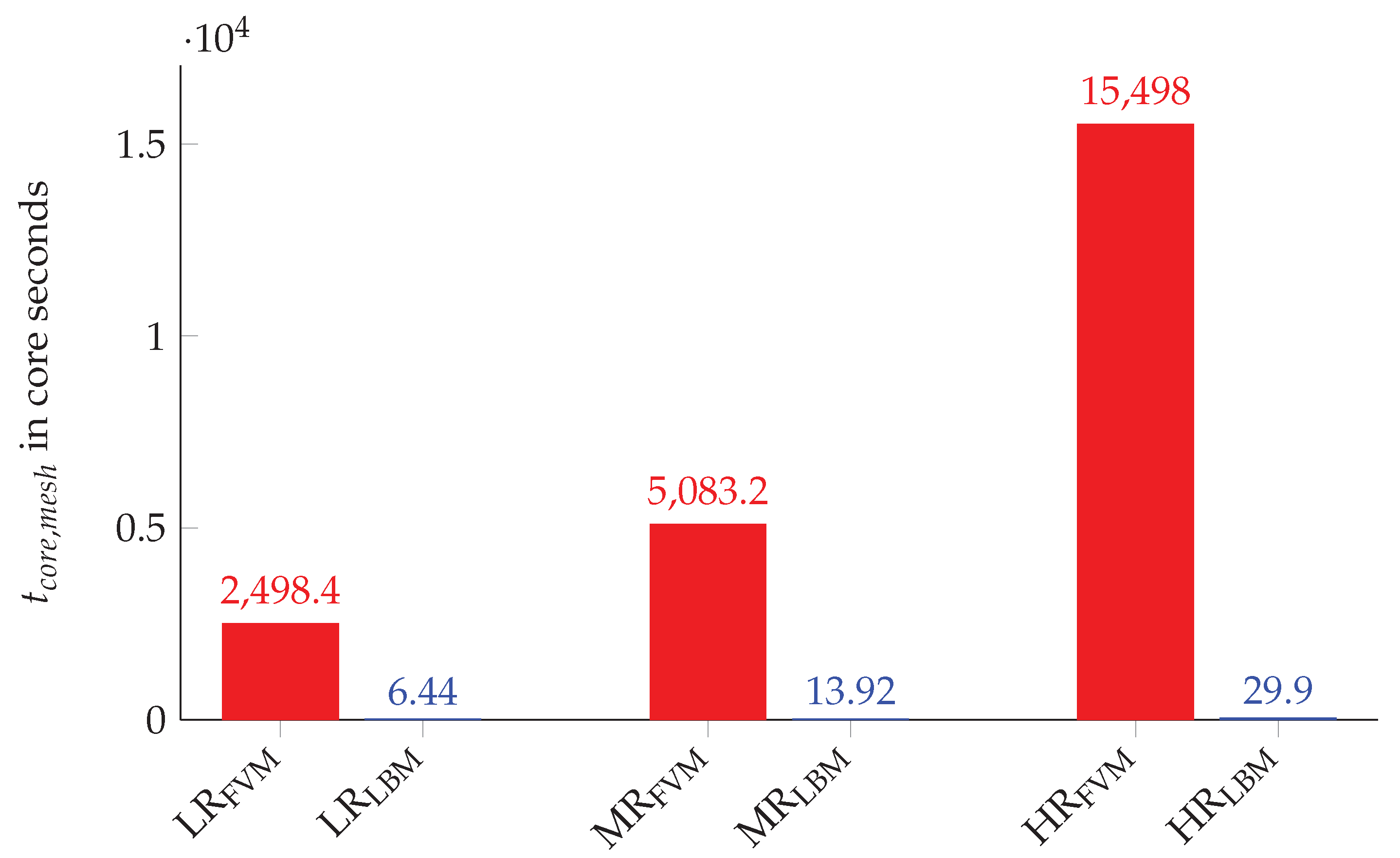
4.4.1. Meshing Performance
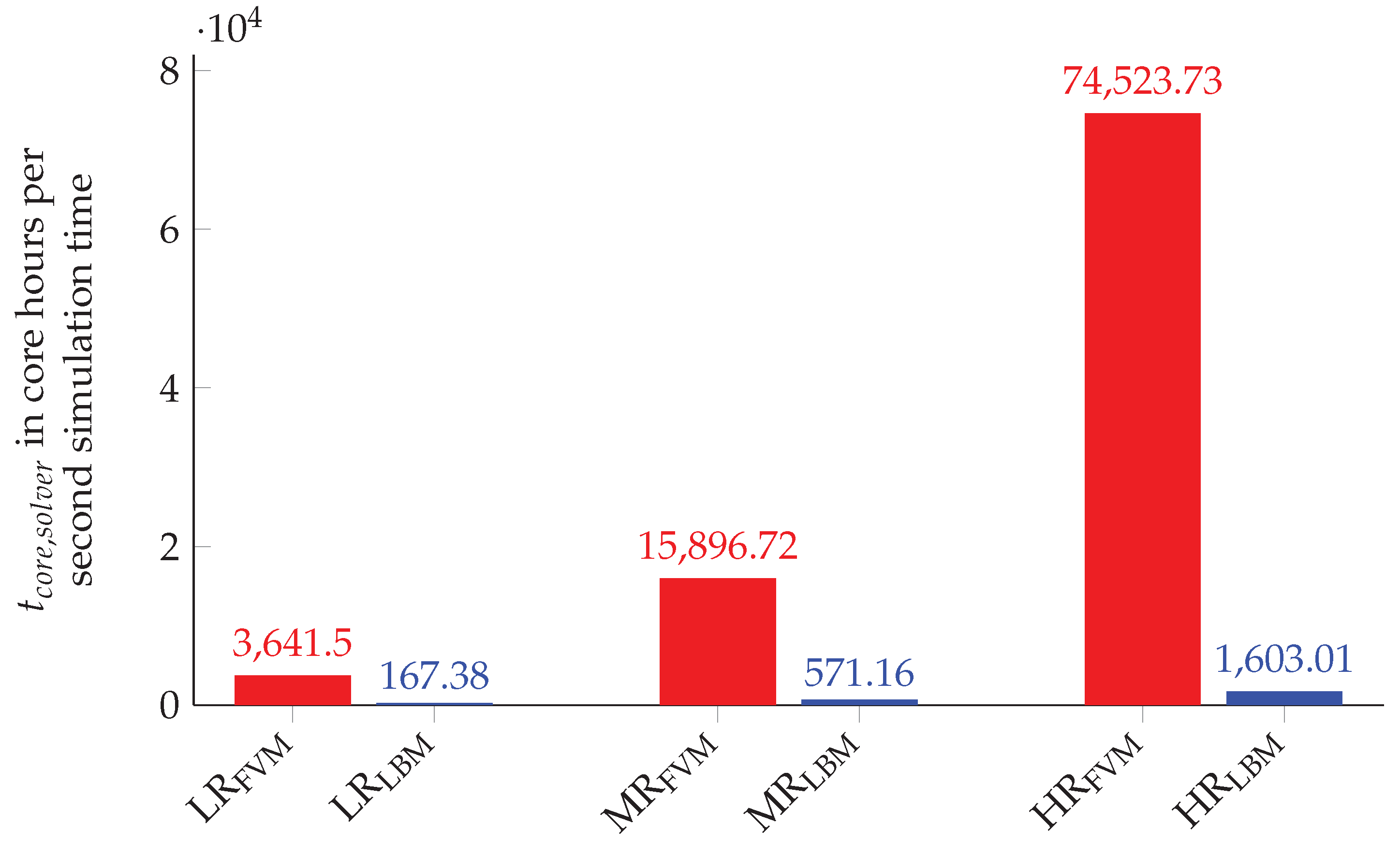
4.4.2. Simulation Performance
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BGK | Bhatnagar–Gross–Krook |
| CFL | Courant–Friedrichs–Lewy number |
| CUPcs | cell updates per core and second |
| CV | control volumes |
| FDM | finite difference method |
| FVM | finite volume method |
| GPU | graphics processing unit |
| HR | high resolution |
| IC | internal combustion |
| LBM | lattice Boltzmann method |
| LES | large eddy simulation |
| MCPc | mean cells per core |
| MR | medium resolution |
| MRV | magnetic resonance velocimetry |
| nMAE | normalized mean absolute error |
| nAE | normalized absolute error |
| NWM | near-wall-modeled |
| PIV | particle image velocimetry |
| RANS | Reynolds-averaged Navier–Stokes |
| RMS | root mean square |
| SGS | sub-grid scale |
| LR | low resolution |
| VP | valve plane |
| Roman | |
| van Driest parameter | |
| set of discrete lattice velocity vectors | |
| discrete lattice normal velocity vector | |
| van Driest model constant | |
| sub-grid scale model coefficient | |
| speed of sound of the lattice | |
| D | intake pipe diameter |
| model related operator | |
| stream-wise unit vector | |
| filtered particle distribution vector | |
| filtered particle distribution vector at equilibrium state | |
| non-equilibrium of the particle distribution function vector | |
| I | turbulence intensity |
| L | integral length scale |
| lattice Mach number | |
| massflow into the flow bench | |
| massflow out of the flow bench | |
| N | resolution |
| number of cores | |
| number of independent ensembles | |
| number of grid cells | |
| number of PIV data points | |
| total number of time steps within | |
| filtered pressure | |
| filtered lattice pressure | |
| pressure at the numerical outflow | |
| absolute pressure at pressure sensor inlet 1 | |
| absolute pressure at pressure sensor inlet 2 | |
| absolute pressure at pressure sensor outlet 1 | |
| absolute pressure at pressure sensor outlet 2 | |
| dimensionless distance | |
| Q | Q-criterion |
| Reynolds number | |
| filtered strain rate tensor | |
| filtered lattice strain rate tensor | |
| t | time |
| averaging time | |
| lattice time | |
| runtime on the core for meshing | |
| runtime on the node for meshing | |
| runtime on the core for the solver per second simulation time | |
| runtime on the node for the solver | |
| passed simulation time | |
| time to a statistically stationary flowfield | |
| effective stress tensor | |
| sub-grid scale stress tensor | |
| wall shear stress | |
| averaged wall shear stress assuming RANS hypothesis | |
| filtered velocity vector | |
| filtered lattice velocity vector | |
| averaged velocity vector assuming RANS hypothesis | |
| filtered lattice velocity vector at position | |
| stream-wise component of | |
| stream-wise component of | |
| friction velocity | |
| dimensionless friction velocity | |
| stream-wise velocity | |
| time-averaged velocity vector | |
| time-averaged velocity vector at the numerical inflow | |
| velocity fluctuation vector | |
| time-averaged velocity fluctuation vector | |
| Reynolds stress tensor | |
| two dimensional time-averaged velocity vector | |
| two dimensional root mean square velocity vector | |
| position vector | |
| lattice position vector | |
| lattice position vector in direction | |
| lattice position vector in direction | |
| lattice position vector in direction | |
| lattice wall position vector | |
| y | wall distance |
| lattice distance from the the node at position distance to the boundary | |
| lattice distance from the the node at position to the boundary | |
| dimensionless wall distance | |
| wall distance of the cell centroid | |
| Greek | |
| Kronecker operator | |
| grid filter | |
| time step | |
| grid spacing | |
| maximal sampling error | |
| dynamic viscosity | |
| temperature at temperature sensor 1 | |
| temperature at temperature sensor 2 | |
| wall temperature | |
| von Kármán constant | |
| kinematic viscosity | |
| effective kinematic viscosity | |
| sub-grid scale kinematic viscosity | |
| lattice kinematic viscosity | |
| lattice effective kinematic viscosity | |
| lattice sub-grid scale kinematic viscosity | |
| filtered lattice momentum flux | |
| filtered second moment of the non-equilibrium of the particle distribution function | |
| density | |
| filtered lattice density | |
| lattice density at the outflow | |
| lattice relaxation time | |
| lattice sub-grid scale relaxation time | |
| lattice effective relaxation time | |
| PIV measurement data | |
| simulated data | |
| lattice weight vector | |
| filtered collision operator vector | |
References
- Freudenhammer, D.; Baum, E.; Peterson, B.; Böhm, B.; Jung, B.; Grundmann, S. Volumetric intake flow measurements of an IC engine using magnetic resonance velocimetry. Exp. Fluids 2014, 55, 1724. [Google Scholar] [CrossRef]
- Rutland, C. Large-eddy simulations for internal combustion engines—A review. Int. J. Eng. Res. 2011, 12, 421–451. [Google Scholar] [CrossRef]
- Vermorel, O.; Richard, S.; Colin, O.; Angelberger, C.; Benkenida, A.; Veynante, D. Towards the understanding of cyclic variability in a spark ignited engine using multi-cycle LES. Combust. Flame 2007, 1525–1541. [Google Scholar] [CrossRef]
- Goryntsev, D.; Sadiki, A.; Klein, M.; Janicka, J. Large eddy simulation based analysis of the effects of cycle-to-cycle variations on air-fuel mixing in realistic DISI engines. Proc. Combust. Inst. 2009, 2759–2766. [Google Scholar] [CrossRef]
- Enaux, B.; Granet, V.; Vermorel, O.; Lacour, C.; Thobois, L.; Dugué, V.; Poinsot, T. Large eddy simulation of a motored single-cylinder piston engine: Numerical strategies and validation. Flow Turbul. Combust. 2010, 53–177. [Google Scholar] [CrossRef]
- Granet, V.; Vermorel, O.; Lacour, C.; Enaux, B.; Dugué, V.; Poinsot, T. Large-Eddy Simulation and experimental study of cycle-to-cycle variations of stable and unstable operating points in a spark ignition engine. Combust. Flame 2012, 1562–11575. [Google Scholar] [CrossRef]
- Goryntsev, D.; Nishad, K.; Sadiki, A.; Janicka, J. Application of LES for analysis of unsteady effects on combustion processes and misfires in DISI engine. Oil Gas Sci. Technol. Revue d’IFP Energies Nouvelles 2014, 129–140. [Google Scholar] [CrossRef][Green Version]
- Reuss, D.L.; Adrian, R.J.; Landreth, C.C.; French, D.T.; Fansler, T.D. Instantaneous planar measurements of velocity and large-scale vorticity and strain rate in an engine using particle-image velocimetry. SAE Trans. 1989, 1116–1141. [Google Scholar]
- Peterson, B.; Sick, V. Simultaneous flow field and fuel concentration imaging at 4.8 kHz in an operating engine. Appl. Phys. B 2009, 97, 887. [Google Scholar] [CrossRef]
- Baum, E.; Peterson, B.; Böhm, B.; Dreizler, A. On the validation of LES applied to internal combustion engine flows: Part 1: Comprehensive experimental database. Flow Turbul. Combust. 2014, 92, 269–297. [Google Scholar] [CrossRef]
- Zentgraf, F.; Baum, E.; Böhm, B.; Dreizler, A.; Peterson, B. On the turbulent flow in piston engines: Coupling of statistical theory quantities and instantaneous turbulence. Phys. Fluids 2016, 28, 045108. [Google Scholar] [CrossRef]
- Gale, N.F. Diesel engine cylinder head design: The compromises and the techniques. SAE Trans. 1990, 415–438. [Google Scholar] [CrossRef]
- Agnew, D.D. What is Limiting your Engine Air Flow: Using Normalized Steady Air Flow Bench Data; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 1994. [Google Scholar] [CrossRef]
- Hartmann, F.; Buhl, S.; Gleiss, F.; Barth, P.; Schild, M.; Kaiser, S.A.; Hasse, C. Spatially resolved experimental and numerical investigation of the flow through the intake port of an internal combustion engine. Oil Gas Sci. Technol. Revue d’IFP Energies Nouvelles 2016, 71, 2. [Google Scholar] [CrossRef]
- Falkenstein, T.; Bode, M.; Kang, S.; Pitsch, H.; Arima, T.; Taniguchi, H. Large-Eddy Simulation study on unsteady effects in a statistically stationary SI engie port flow. SAE Int. 2015. [Google Scholar] [CrossRef]
- Buhl, S.; Hartmann, F.; Kaiser, S.A.; Hasse, C. Investigation of an IC engine intake flow based on highly resolved LES and PIV. Oil Gas Sci. Technol. Revue d’IFP Energies Nouvelles 2017, 72, 15. [Google Scholar] [CrossRef]
- Falkenstein, T.; Kang, S.; Davidovic, M.; Bode, M.; Pitsch, H.; Kamatsuchi, T.; Nagao, J.; Arima, T. LES of Internal Combustion Engine Flows Using Cartesian Overset Grids. Oil Gas Sci. Technol.–Revue d’IFP Energies Nouvelles 2017, 72, 36. [Google Scholar] [CrossRef]
- Nishad, K.; Ries, F.; Li, Y.; Sadiki, A. Numerical Investigation of Flow through a Valve during Charge Intake in a DISI-Engine using Large Eddy Simulation. Energies 2019, 12, 2620. [Google Scholar] [CrossRef]
- Gaedtke, M.; Hoffmann, T.; Reinhardt, V.; Thäter, G.; Nirschl, H.; Krause, M.J. Flow and heat transfer simulation with a thermal large eddy lattice Boltzmann method in an annular gap with an inner rotating cylinder. Int. J. Modern Phys. C 2019, 30, 1950013. [Google Scholar] [CrossRef]
- Gaedtke, M.; Wachter, S.; Kunkel, S.; Sonnick, S.; Rädle, M.; Nirschl, H.; Krause, M.J. Numerical study on the application of vacuum insulation panels and a latent heat storage for refrigerated vehicles with a large Eddy lattice Boltzmann method. Heat Mass Transf. 2020, 56, 1189–1201. [Google Scholar] [CrossRef]
- Augusto, L.d.L.X.; Ross-Jones, J.; Lopes, G.C.; Tronville, P.; Gonçalves, J.A.S.; Rädle, M.; Krause, M.J. Microfiber filter performance prediction using a lattice Boltzmann method. Commun. Comput. Phys. 2018, 23, 910–931. [Google Scholar] [CrossRef]
- Henn, T.; Heuveline, V.; Krause, M.J.; Ritterbusch, S. Aortic Coarctation Simulation Based on the Lattice Boltzmann Method: Benchmark Results. In Statistical Atlases and Computational Models of the Heart. Imaging and Modelling Challenges; Camara, O., Mansi, T., Pop, M., Rhode, K., Sermesant, M., Young, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 34–43. [Google Scholar]
- Heuveline, V.; Krause, M.J.; Latt, J. Towards a hybrid parallelization of lattice Boltzmann methods. Comput. Math. Appl. 2009, 58, 1071–1080. [Google Scholar] [CrossRef]
- Heuveline, V.; Krause, M.J. OpenLB: Towards an efficient parallel open source library for lattice Boltzmann fluid flow simulations. In International Workshop on State-of-the-Art in Scientific and Parallel Computing; PARA: Trondheim, Norway, 2010; Volume 9. [Google Scholar]
- Kajzer, A.; Pozorski, J.; Szewc, K. Large-eddy simulations of 3D Taylor-Green vortex: Comparison of smoothed particle hydrodynamics, lattice Boltzmann and finite volume methods. J. Phys. Conf. Ser. 2014, 530, 012019. [Google Scholar] [CrossRef]
- Pasquali, A.; Schönherr, M.; Geier, M.; Krafczyk, M. Simulation of external aerodynamics of the DrivAer model with the LBM on GPGPUs. In Parallel Computing: On the Road to Exascale; IOS Press: Amsterdam, The Netherlands, 2016; Volume 27, pp. 391–400. [Google Scholar] [CrossRef]
- Jin, Y.; Uth, M.; Herwig, H. Structure of a turbulent flow through plane channels with smooth and rough walls: An analysis based on high resolution DNS results. Comput. Fluids 2015, 107, 77–88. [Google Scholar] [CrossRef]
- Barad, M.F.; Kocheemoolayil, J.G.; Kiris, C.C. Lattice Boltzmann and Navier-stokes cartesian cfd approaches for airframe noise predictions. In Proceedings of the 23rd AIAA Computational Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017; p. 4404. [Google Scholar]
- Montessori, A.; Falcucci, G. Lattice Boltzmann Modeling of Complex Flows for Engineering Applications; Morgan & Claypool Publishers: San Rafael, CA, USA, 2018. [Google Scholar]
- Dorschner, B.; Bösch, F.; Chikatamarla, S.S.; Boulouchos, K.; Karlin, I.V. Entropic multi-relaxation time lattice Boltzmann model for complex flows. J. Fluid Mech. 2016, 801, 623–651. [Google Scholar] [CrossRef]
- Krause, M.; Avis, S.; Dapalo, D.; Hafen, N.; Haußmann, M.; Gaedtke, M.; Klemens, F.; Kummerländer, A.; Maier, M.L.; Mink, A.; et al. OpenLB Release 1.3: Open Source Lattice Boltzmann Code. 2019. Available online: http://optilb.com/openlb/wp-content/uploads/2011/12/olb_ug-0.5r0.pdf (accessed on 30 April 2020).
- Malaspinas, O.; Sagaut, P. Wall model for large-eddy simulation based on the lattice Boltzmann method. J. Comput. Phys. 2014, 275, 25–40. [Google Scholar] [CrossRef]
- Haussmann, M.; Barreto, A.C.; Kouyi, G.L.; Rivière, N.; Nirschl, H.; Krause, M.J. Large-eddy simulation coupled with wall models for turbulent channel flows at high Reynolds numbers with a lattice Boltzmann method—Application to Coriolis mass flowmeter. Comput. Math. Appl. 2019, 78, 3285–3302. [Google Scholar] [CrossRef]
- Leonard, A. Energy cascade in large-eddy simulations of turbulent fluid flows. Adv. Geophys. A 1974, 18, 237–248. [Google Scholar]
- Hirsch, C. Numerical Computation of Internal & External Flows: Fundamentals of Computational Fluid Dynamics, 2nd ed.; John Wiley & Sons: Burlington, MA, USA, 2007. [Google Scholar]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flows. Ph.D. Thesis, University of London, London, UK, 1996. [Google Scholar]
- Greenshields, C.J. OpenFOAM Programmer’s Guide Version 3.0.1; OpenFOAM Foundation Ltd.: England, UK, 13 December 2015. [Google Scholar]
- Ferziger, J.; Perić, M. Computational Methods for Fluid Dynamics, 3rd ed.; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2002. [Google Scholar]
- Greenshields, C.; Weller, H.; Gasparini, L.; Reese, J. Implementation of semi-discrete, non-staggered central schemes in a colocated, polyhedral, finite volume framework, for high-speed viscous flows. Int. J. Numer. Meth. Fluids 2010, 63, 1–21. [Google Scholar] [CrossRef]
- Issa, R. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1985, 62, 40–65. [Google Scholar] [CrossRef]
- Patankar, S.; Spalding, D. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Trans. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Ries, F.; Nishad, K.; Dressler, L.; Janicka, J.; Sadiki, A. Evaluating large eddy simulation results based on error analysis. Theor. Comput. Fluid Dyn. 2018, 32, 733–752. [Google Scholar] [CrossRef]
- Ries, F. Numerical Modeling and Prediction of Irreversibilities in Sub- and Supercritical Turbulent Near-Wall Flows. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2019. [Google Scholar]
- Kang, S.K.; Hassan, Y.A. The effect of lattice models within the lattice Boltzmann method in the simulation of wall-bounded turbulent flows. J. Comput. Phys. 2013, 232, 100–117. [Google Scholar] [CrossRef]
- Bhatnagar, P.L.; Gross, E.P.; Krook, M. A Model for Collision Processes in Gases. I. Small Amplitude Processes in Charged and Neutral One-Component Systems. Phys. Rev. 1954, 94, 511–525. [Google Scholar] [CrossRef]
- He, X.; Luo, L.S. Theory of the lattice Boltzmann method: From the Boltzmann equation to the lattice Boltzmann equation. Phys. Rev. E 1997, 56, 6811–6817. [Google Scholar] [CrossRef]
- Shan, X.; Yuan, X.F.; Chen, H. Kinetic theory representation of hydrodynamics: A way beyond the Navier–Stokes equation. J. Fluid Mech. 2006, 550, 413–441. [Google Scholar] [CrossRef]
- Smagorinsky, J. General circulation experiments with the primitive equations: I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Moin, P.; Kim, J. Numerical investigation of turbulent channel flow. J. Fluid Mech. 1982, 118, 341–377. [Google Scholar] [CrossRef]
- Rogallo, R.S.; Moin, P. Numerical Simulation of Turbulent Flows. Annu. Rev. Fluid Mech. 1984, 16, 99–137. [Google Scholar] [CrossRef]
- Fröhlich, J. Large Eddy Simulation Turbulenter Strömungen; Springer, B.G. Teubner Verlag/GWV Fachverlage GmbH: Wiesbaden, Gemany, 2006; Volume 1. [Google Scholar]
- Nicoud, F.; Ducros, F. Subgrid-Scale Stress Modelling Based on the Square of the Velocity Gradient Tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Driest, E.V. On turbulent flow near a wall. J. Aeronaut. Sci. 1956, 23, 1007–1011. [Google Scholar] [CrossRef]
- Nagib, H.M.; Chauhan, K.A. Variations of von Kármán coefficient in canonical flows. Phys. Fluids 2008, 20, 101518. [Google Scholar] [CrossRef]
- de Villiers, E. The Potential of Large Eddy Simulation for the Modeling of Wall Bounded Flows. Ph.D Thesis, University of London, London, UK, 2006. [Google Scholar]
- Hou, S.; Sterling, J.; Chen, S.; Doolen, G. A lattice Boltzmann subgrid model for high Reynolds number flows. arXiv 1998, arXiv:comp-gas/9401004. [Google Scholar]
- Malaspinas, O.; Sagaut, P. Consistent subgrid scale modelling for lattice Boltzmann methods. J. Fluid Mech. 2012, 700, 514–542. [Google Scholar] [CrossRef]
- Werner, H.; Wengle, H. Large-eddy simulation of turbulent flow over and around a cube in a plate channel. In Turbulent Shear Flows 8; Springer: Berlin/Heidelberg, Germany, 1993; pp. 155–168. [Google Scholar]
- Musker, A. Explicit expression for the smooth wall velocity distribution in a turbulent boundary layer. AIAA J. 1979, 17, 655–657. [Google Scholar] [CrossRef]
- Li, Y.; Ries, F.; Nishad, K.; Sadiki, A. Near-wall modeling of LES for non-equilibrium turbulent flows in an inclined impinging jet with moderate Re-number. In Proceedings of the 6th European Conference on Computational Mechanics (ECCM 6), Glasgow, UK, 11–15 June 2018. [Google Scholar]
- Bouzidi, M.; Firdaouss, M.; Lallemand, P. Momentum transfer of a Boltzmann-lattice fluid with boundaries. Phys. Fluids 2001, 13, 3452–3459. [Google Scholar] [CrossRef]
- Stich, G.D.; Housman, J.A.; Kocheemoolayil, J.G.; Barad, M.F.; Kiris, C.C. Application of Lattice Boltzmann and Navier-Stokes Methods to NASA’s Wall Mounted Hump. In Proceedings of the 2018 AIAA AVIATION Forum, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Freudenhammer, D.; Peterson, B.; Ding, C.P.; Boehm, B.; Grundmann, S. The influence of cylinder head geometry variations on the volumetric intake flow captured by magnetic resonance velocimetry. SAE Int. J. Engines 2015, 8, 1826–1836. [Google Scholar] [CrossRef]
- Raffel, M.; Willert, C.E.; Wereley, S.T.; Kompenhans, J. Particle Image Velocimetry; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Charonko, J.J.; Vlachos, P.P. Estimation of uncertainty bounds for individual particle image velocimetry measurements from cross-correlation peak ratio. Meas. Sci. Technol. 2013, 24, 065301. [Google Scholar] [CrossRef]
- Sciacchitano, A.; Wieneke, B.; Scarano, F. PIV uncertainty quantification by image matching. Meas. Sci. Technol. 2013, 24, 045302. [Google Scholar] [CrossRef]
- Wieneke, B. PIV uncertainty quantification from correlation statistics. Meas. Sci. Technol. 2015, 26, 074002. [Google Scholar] [CrossRef]
- Sciacchitano, A.; Neal, D.R.; Smith, B.L.; Warner, S.O.; Vlachos, P.P.; Wieneke, B.; Scarano, F. Collaborative framework for PIV uncertainty quantification: Comparative assessment of methods. Meas. Sci. Technol. 2015, 26, 074004. [Google Scholar] [CrossRef]
- Klein, M.; Sadiki, A.; Janicka, J. A digital filter based generation of inflow data for spatially developing direct numerical or large eddy simulations. J. Comput. Phys. 2003, 186, 652–665. [Google Scholar] [CrossRef]
- Latt, J.; Chopard, B.; Malaspinas, O.; Deville, M.; Michler, A. Straight velocity boundaries in the lattice Boltzmann method. Phys. Rev. E 2008, 77, 056703. [Google Scholar] [CrossRef] [PubMed]
- Kida, S.; Mirua, H. Identification and Analysis of Vortical Structures. Eur. J. Mech. B/Fluids 1998, 17, 471–488. [Google Scholar] [CrossRef]
- Axtmann, G.; Rist, U. Scalability of OpenFOAM with Large Eddy Simulations and DNS on High-Performance Systems. In High Perfromance Computing in Science and Engineering; Springer: Cham, Switzerland, 2016; Volume 16, pp. 413–424. [Google Scholar] [CrossRef]
- Krause, M.; Kummerländer, A.; Avis, S.; Kusumaatmaja, H.; Dapelo, D.; Klemens, F.; Gaedtke, M.; Hafen, N.; Mink, A.; Trunk, R.; et al. OpenLB–Open Source Lattice Boltzmann Code. 2020; submitted. [Google Scholar]
- Chen, L.; Yu, Y.; Lu, J.; Hou, G. A comparative study of lattice Boltzmann methods using bounce-back schemes and immersed boundary ones for flow acoustic problems. Int. J. Numer. Methods Fluids 2014, 74, 439–467. [Google Scholar] [CrossRef]
- Peng, C.; Ayala, O.M.; de Motta], J.C.B.; Wang, L.P. A comparative study of immersed boundary method and interpolated bounce-back scheme for no-slip boundary treatment in the lattice Boltzmann method: Part II, turbulent flows. Comput. Fluids 2019, 192, 104251. [Google Scholar] [CrossRef]
- Pohl, T.; Kowarschik, M.; Wilke, J.; Iglberger, K.; Rüde, U. Optimization and profiling of the cache performance of parallel lattice Boltzmann codes. Parallel Process. Lett. 2003, 13, 549–560. [Google Scholar] [CrossRef]
- Fietz, J.; Krause, M.J.; Schulz, C.; Sanders, P.; Heuveline, V. Optimized hybrid parallel lattice Boltzmann fluid flow simulations on complex geometries. In European Conference on Parallel Processing; Springer: Cham, Switzerland, 2012; pp. 818–829. [Google Scholar]
- Slotnick, J.; Khodadoust, A.; Alonso, J.; Darmofal, D.; Gropp, W.; Lurie, E.; Mavriplis, D. CFD Vision 2030 Study: A Path to Revolutionary Computational Aerosciences; NASA Center for AeroSpace Information: Hanover, MD, USA, 2014. [Google Scholar]
- Shih, T.H.; Povinelli, L.A.; Liu, N.S.; Chen, K.H. Generalized wall function for complex turbulent flows. In Proceedings of the 38th Aerospace Sciences, Reno, NV, USA, 10–13 January 2000. [Google Scholar]
- Craft, T.; Gerasimov, A.; Iacovides, H.; Launder, B. Progress in the generalization of wall-function treatments. Int. J. Heat Fluid 2002, 23, 148–160. [Google Scholar] [CrossRef]
- Popvac, M.; Hanjalic, K. Compound Wall Treatment for RANS Computation of Complex Turbulent Flows and Heat Transfer. Flow Turhul. Combust. 2007, 78, 177–202. [Google Scholar] [CrossRef]
- Germano, M. A dynamic subgrid-scale eddy viscosity model. Phys. Fluids 1991, 3, 1760–1765. [Google Scholar] [CrossRef]
- Bardina, J.; Ferziger, J.; Reynolds, W. Improved subgrid-scale models for large-eddy simulation. In Proceedings of the 3th Fluid and Plasmadynamics Conference, Los Angeles, CA, USA, 29 June–1 July 1970; p. 1357. [Google Scholar]
- Frouzakis, C.E. Lattice boltzmann methods for reactive and other flows. In Turbulent Combustion Modeling; Springer: Cham, Switzerland, 2011; pp. 461–486. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Valve Lift | 9.21(0.15) mm |
|---|---|
| 22.7(0.5) °C | |
| 1.000(0.001) bar | |
| 0.998(0.001) bar | |
| 94.10(1.00) kg/hr | |
| kg/(m s) | |
| 1.18 kg/m3 | |
| (estimated) | 22(1) °C |
| Solver | Identifier | |||||
|---|---|---|---|---|---|---|
| OpenFOAM | − | 1 | ||||
| OpenFOAM | − | 1 | ||||
| OpenFOAM | − | 1 | ||||
| OpenLB | − | |||||
| OpenLB | − | |||||
| OpenLB | − |
| Solver | Identifier | MCPc | CUPcs |
|---|---|---|---|
| OpenFOAM | |||
| OpenFOAM | |||
| OpenFOAM | |||
| OpenLB | |||
| OpenLB | |||
| OpenLB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haussmann, M.; Ries, F.; Jeppener-Haltenhoff, J.B.; Li, Y.; Schmidt, M.; Welch, C.; Illmann, L.; Böhm, B.; Nirschl, H.; Krause, M.J.; et al. Evaluation of a Near-Wall-Modeled Large Eddy Lattice Boltzmann Method for the Analysis of Complex Flows Relevant to IC Engines. Computation 2020, 8, 43. https://doi.org/10.3390/computation8020043
Haussmann M, Ries F, Jeppener-Haltenhoff JB, Li Y, Schmidt M, Welch C, Illmann L, Böhm B, Nirschl H, Krause MJ, et al. Evaluation of a Near-Wall-Modeled Large Eddy Lattice Boltzmann Method for the Analysis of Complex Flows Relevant to IC Engines. Computation. 2020; 8(2):43. https://doi.org/10.3390/computation8020043
Chicago/Turabian StyleHaussmann, Marc, Florian Ries, Jonathan B. Jeppener-Haltenhoff, Yongxiang Li, Marius Schmidt, Cooper Welch, Lars Illmann, Benjamin Böhm, Hermann Nirschl, Mathias J. Krause, and et al. 2020. "Evaluation of a Near-Wall-Modeled Large Eddy Lattice Boltzmann Method for the Analysis of Complex Flows Relevant to IC Engines" Computation 8, no. 2: 43. https://doi.org/10.3390/computation8020043
APA StyleHaussmann, M., Ries, F., Jeppener-Haltenhoff, J. B., Li, Y., Schmidt, M., Welch, C., Illmann, L., Böhm, B., Nirschl, H., Krause, M. J., & Sadiki, A. (2020). Evaluation of a Near-Wall-Modeled Large Eddy Lattice Boltzmann Method for the Analysis of Complex Flows Relevant to IC Engines. Computation, 8(2), 43. https://doi.org/10.3390/computation8020043