
Solving Nonlinear Energy Supply and Demand System Using Physics-Informed Neural Networks
 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
2. Problem Description
3. Methods
3.1. Deep Learning Neural Networks
3.1.1. The Generalized Model of a Neural Network
3.1.2. The Process of Optimizing the Parameters of a Neural Network
3.2. Physics-Informed Neural Networks (PINNs)
4. Model Building
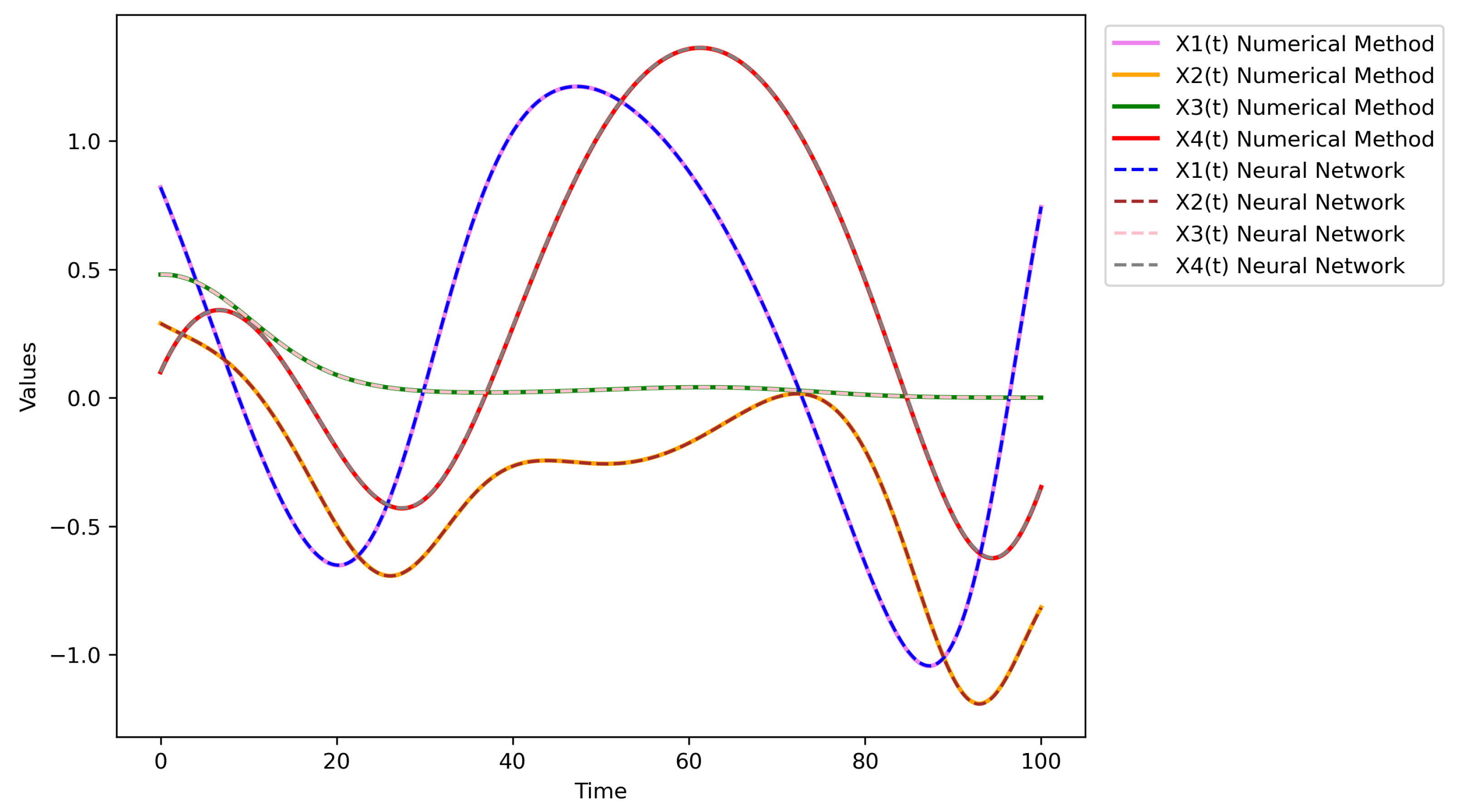
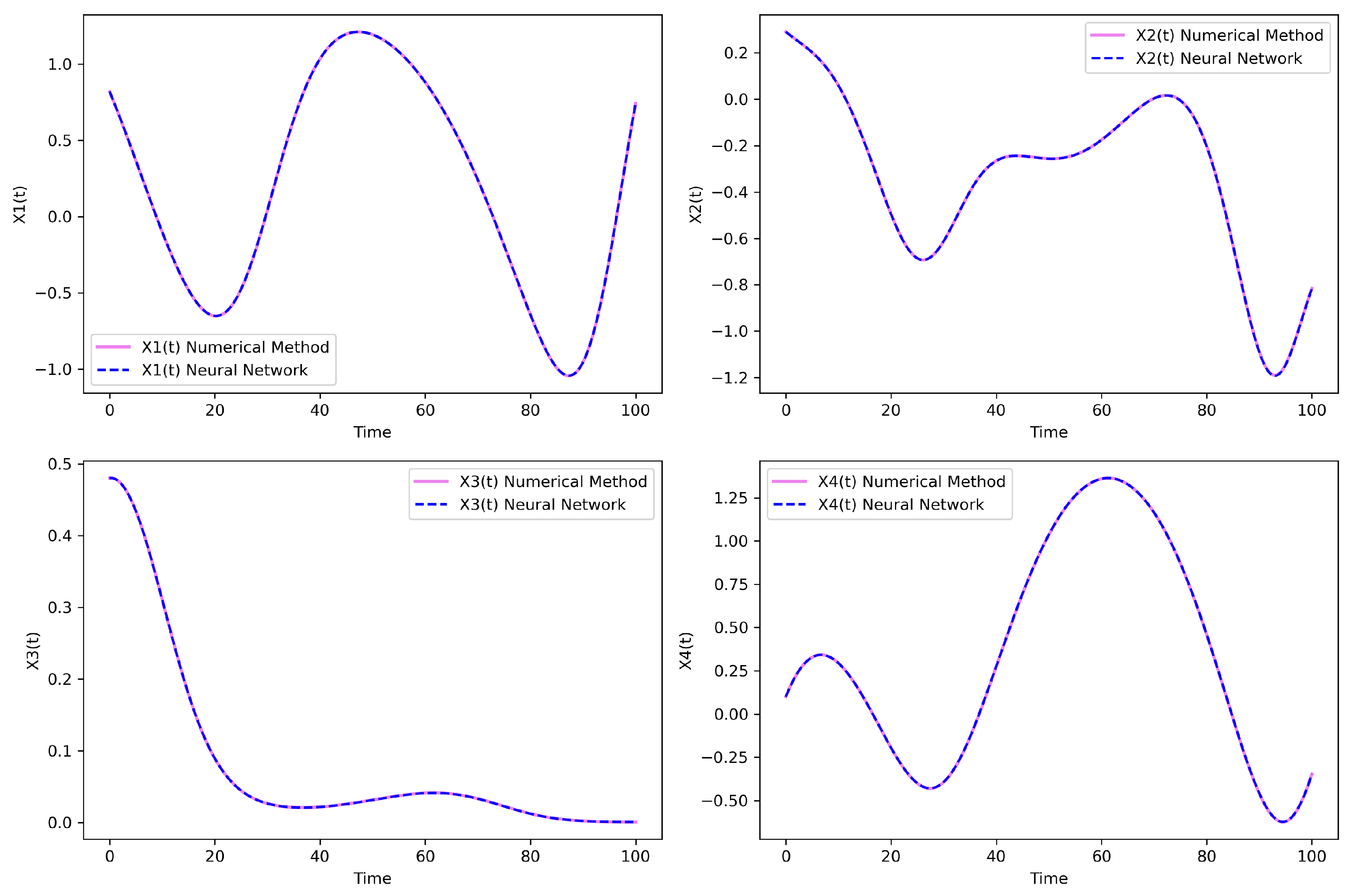
5. Results and Evaluation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Chicone, C. Ordinary Differential Equations with Applications; Springer: New York, NY, USA, 1999. [Google Scholar]
- Wong, P.J.Y. Applications of Partial Differential Equations; MDPI: Basel, Switzerland, 2023. [Google Scholar] [CrossRef]
- Zachmanoglou, E.C.; Thoe, D.W. Introduction to Partial Differential Equations with Applications; Dover Publications, Inc.: New York, NY, USA, 1986. [Google Scholar]
- Tomin, N.; Shakirov, V.; Kurbatsky, V.; Muzychuk, R.; Popova, E.; Sidorov, D.; Kozlov, A.; Yang, D. A multi-criteria approach to designing and managing a renewable energy community. Renew. Energy 2022, 199, 1153–1175. [Google Scholar] [CrossRef]
- Sidorov, D.; Tao, Q.; Muftahov, I.; Zhukov, A.; Karamov, D.; Dreglea, A.; Liu, F. Energy balancing using charge/discharge storages control and load forecasts in a renewable-energy-based grids. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6865–6870. [Google Scholar] [CrossRef]
- Sun, M.; Jia, Q.; Tian, L. A new four-dimensional energy resources system and its linear feedback control. Chaos Solitons Fractals 2007, 39, 101–108. [Google Scholar] [CrossRef]
- Sun, M.; Tian, L.; Fu, Y. An energy resources demand–supply system and its dynamical analysis. Chaos Solitons Fractals 2005, 32, 168–180. [Google Scholar] [CrossRef]
- Sun, M.; Tian, L.; Jia, Q. Adaptive control and synchronization of a four-dimensional energy resources system with unknown parameters. Chaos Solitons Fractals 2009, 39, 1943–1949. [Google Scholar] [CrossRef]
- Vuik, C.; Vermolen, F.J.; van Gijzen, M.B.; Vuik, M.J. Numerical Methods for Ordinary Differential Equations; Delft University of Technology (TU Delft): Delft, The Netherlands, 2023. [Google Scholar] [CrossRef]
- Lyengar, S.R.K.; Jain, R.K. Numerical Methods; New Age International Publishers: New Delhi, India, 2009. [Google Scholar]
- Cybenko, G. Approximation by superpositions of a sigmoidal function. Math. Control Signal Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Universal approximation of an unknown mapping and its derivatives using multilayer feedforward networks. Neural Netw. 1990, 3, 551–560. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial Neural Networks for Solving Ordinary and Partial Differential Equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-Informed Neural Networks: A Deep Learning Framework for Solving Forward and Inverse Problems Involving Nonlinear Partial Differential Equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics Informed Deep Learning (Part I): Data-driven Solutions of Nonlinear Partial Differential Equations. arXiv 2017, arXiv:1711.10561. [Google Scholar] [CrossRef]
- Raissi, M.; Yazdani, A.; Karniadakis, G.E. Hidden Fluid Mechanics: A Navier-Stokes Informed Deep Learning Framework for Assimilating Flow Visualization Data. arXiv 2018, arXiv:1808.04327. [Google Scholar] [CrossRef]
- Margenberg, N.; Hartmann, D.; Lessig, C.; Richter, T. A Neural Network Multigrid Solver for the Navier-Stokes Equations. J. Comput. Phys. 2022, 460, 110983. [Google Scholar] [CrossRef]
- Hu, B.; McDaniel, D. Applying Physics-Informed Neural Networks to Solve Navier–Stokes Equations for Laminar Flow Around a Particle. Math. Comput. Appl. 2023, 28, 102. [Google Scholar] [CrossRef]
- Farkane, A.; Ghogho, M.; Oudani, M.; Boutayeb, M. EPINN-NSE: Enhanced Physics-Informed Neural Networks for Solving Navier-Stokes Equations. arXiv 2023, arXiv:2304.03689. [Google Scholar] [CrossRef]
- Eivazi, H.; Tahani, M.; Schlatter, P.; Vinuesa, R. Physics-Informed Neural Networks for Solving Reynolds-Averaged Navier–Stokes Equations. Phys. Fluids 2022, 34, 075117. [Google Scholar] [CrossRef]
- Lu, L.; Meng, X.; Mao, Z.; Karniadakis, G.E. DeepXDE: A Deep Learning Library for Solving Differential Equations. SIAM Rev. 2021, 63, 208–228. [Google Scholar] [CrossRef]
- Sidorov, D.; Tynda, A.; Muftahov, I.; Dreglea, A.; Liu, F. Nonlinear Systems of Volterra Equations with Piecewise Smooth Kernels: Numerical Solution and Application for Power Systems Operation. Mathematics 2020, 8, 1257. [Google Scholar] [CrossRef]
- Yuan, L.; Ni, Y.-Q.; Deng, X.-Y.; Hao, S. A-PINN: Auxiliary Physics-Informed Neural Networks for Forward and Inverse Problems of Nonlinear Integro-Differential Equations. J. Comput. Phys. 2022, 462, 111260. [Google Scholar] [CrossRef]
- Li, H.; Shi, P.; Li, X. Machine Learning for Nonlinear Integro-Differential Equations with Degenerate Kernel Scheme. Commun. Nonlinear Sci. Numer. Simul. 2024, 138, 108242. [Google Scholar] [CrossRef]
- Matthews, J.; Bihlo, A. PinnDE: Physics-Informed Neural Networks for Solving Differential Equations. arXiv 2024, arXiv:2408.10011. [Google Scholar] [CrossRef]
- Baty, H.; Baty, L. Solving Differential Equations Using Physics-Informed Deep Learning: A Hands-On Tutorial with Benchmark Tests. arXiv 2023, arXiv:2302.12260. [Google Scholar] [CrossRef]
- Uriarte, C. Solving Partial Differential Equations Using Artificial Neural Networks. arXiv 2024, arXiv:2403.09001. [Google Scholar] [CrossRef]
- Gorikhovskii, V.I.; Evdokimova, T.O.; Poletansky, V.A. Neural Networks in Solving Differential Equations. J. Phys. Conf. Ser. 2022, 2308, 012008. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Chollet, F. Deep Learning with Python, 2nd ed.; Manning Publications: Shelter Island, NY, USA, 2021. [Google Scholar]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow, 2nd ed.; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Nielsen, M. Neural Networks and Deep Learning. 2016. Available online: http://neuralnetworksanddeeplearning.com/ (accessed on 15 October 2024).
- Nguyen, T.T. Basic Deep Learning. 2020. Available online: https://nttuan8.com/sach-deep-learning-co-ban/ (accessed on 1 October 2024).
- SciPy Reference. Available online: https://docs.scipy.org/doc/scipy/reference/integrate.html (accessed on 5 September 2024).
- Dormand, J.R.; Prince, P.J. A Family of Embedded Runge-Kutta Formulae. J. Comput. Appl. Math. 1980, 6, 19–26. [Google Scholar] [CrossRef]
- Shampine, L.W. Some Practical Runge-Kutta Formulas. Math. Comput. 1986, 46, 135–150. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Wang, Y.; Kang, X.; Geng, R.; Li, A.; Xiao, F.; Zhang, C.; Yan, D. Investigating the Deviation Between Prediction Accuracy Metrics and Control Performance Metrics in the Context of an Ice-Based Thermal Energy Storage System. J. Energy Storage 2024, 91, 112126. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Error | Error | Error | Error |
|---|---|---|---|---|
| Numerical method | ||||
| Neural network |
| Evaluation Metric | ||||
|---|---|---|---|---|
| R-squared | ||||
| MAE | 9.55051342325 × | |||
| MSE | 7.88852598020 × | 6.61855514079 × | 1.26016840498 × | 1.17917245907 × |
| RMSE |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vo, V.T.; Noeiaghdam, S.; Sidorov, D.; Dreglea, A.; Wang, L. Solving Nonlinear Energy Supply and Demand System Using Physics-Informed Neural Networks. Computation 2025, 13, 13. https://doi.org/10.3390/computation13010013
Vo VT, Noeiaghdam S, Sidorov D, Dreglea A, Wang L. Solving Nonlinear Energy Supply and Demand System Using Physics-Informed Neural Networks. Computation. 2025; 13(1):13. https://doi.org/10.3390/computation13010013
Chicago/Turabian StyleVo, Van Truong, Samad Noeiaghdam, Denis Sidorov, Aliona Dreglea, and Liguo Wang. 2025. "Solving Nonlinear Energy Supply and Demand System Using Physics-Informed Neural Networks" Computation 13, no. 1: 13. https://doi.org/10.3390/computation13010013
APA StyleVo, V. T., Noeiaghdam, S., Sidorov, D., Dreglea, A., & Wang, L. (2025). Solving Nonlinear Energy Supply and Demand System Using Physics-Informed Neural Networks. Computation, 13(1), 13. https://doi.org/10.3390/computation13010013