1. Introduction
The chlorite-iodide-malonic acid (CIMA) chemical reaction serves as a pivotal model for the fractional variant of the Lengyel-Epstein reaction-diffusion system, capturing the attention of numerous neuroscientists [
1,
2,
3,
4]. This interest stems from its historical significance as one of the earliest experimental validations of Alan Turing’s 1952 theoretical propositions, particularly regarding the chemical mechanisms underlying morphogenesis and pattern formation [
5]. The CIMA reaction encompasses three chemical reaction schemes:
The simplified representation of this reaction into the traditional Lengyel-Epstein model incorporates the empirical rate laws while neglecting constant factors. This model features two dependent variables,
and
, which represent the temporal variations in the concentrations of
and
, respectively. Various studies have examined the overall behavior of the Lengyel-Epstein system, detailing sufficient criteria for both its local and global asymptotic stability [
6,
7,
8,
9]. Furthermore, ref. [
10] provides sufficient criteria for either Turing or diffusion-driven instability of the system.
Finite-time stability in a dynamical system implies that trajectories converge to an equilibrium point within a finite time span, maintaining proximity to this equilibrium throughout. In contrast, finite-time synchronization involves achieving coordination among the states of multiple dynamical systems within a finite duration, aligning their states irrespective of initial conditions. This concept is critical in applications requiring rapid coordination within specific time constraints [
11,
12,
13,
14,
15,
16,
17,
18].
This research introduces a novel approach to exploring finite-time stability and synchronization within a subset of fractional-order spatiotemporal partial differential systems. The primary goal is to investigate both finite-time stability and finite-time synchronization in interconnected fractional reaction-diffusion systems. Utilizing a fractional Lyapunov method, we propose a linear control technique to achieve finite-time synchronization for general fractional reaction-diffusion systems. The effectiveness and practicality of these control methods are demonstrated through the synchronization behaviors of interconnected fractional-order Lengyel-Epstein systems.
The paper is structured as follows:
Section 2 establishes the foundational concepts necessary for understanding the fractional-order nonlinear system described by the Caputo fractional-order derivative.
Section 3 describes the model for the Lengyel-Epstein reaction-diffusion system, which simulates the chlorite-iodide-malonic acid (CIMA) reaction in an open, unstirred gel reactor. The model is presented with equations that define the dynamics of the activator and inhibitor concentrations over time and space.
Section 4 focuses on establishing the prerequisites for ensuring the finite-time stability of the equilibrium point in a fractional-order nonlinear system.
Section 5 examines finite-time synchronization in reaction-diffusion systems, particularly focusing on the Lengyel-Epstein subsystem. The aim is to achieve rapid synchronization of spatially distributed components within a specified time frame, ensuring efficient coherence across the system’s spatial elements.
Section 6 presents two practical scenarios to validate the proposed approach and verify the theoretical findings.
2. Preliminaries
Consider the following fractional-order nonlinear system described by the Caputo fractional-order derivative:
where
and
. The order
and
. The origin
is within the domain
, and
is piecewise continuous in
t on
[
19].
Definition 1 ([
20])
. The Riemann–Liouville fractional-order integral operator of an arbitrary integrable function is defined as:where , , and is the gamma function. Definition 2 ([
21])
. The Caputo fractional derivative of order is defined aswhere m is the smallest integer greater than ℵ and . Definition 3 ([
22])
. The Mittag-Leffler function with , denoted by , is defined as: Lemma 1 ([
12,
19])
. For all and , the following inequality holds: Definition 4 ([
23])
. Suppose is an open neighborhood of if there is a function called the setting-time satisfying (1) and (2), then, is called a finite-time stable equilibrium point of the system (4).- 1.
and for
- 2.
For every open neighborhood of 0, there is an open subset containing 0 in satisfying for and
Theorem 1 ([
23])
. is an finite-time stability equilibrium point of the fractional-order nonlinear systems (4) if there exists a differentiable Lyapunov function three class functions and a such that- 1.
- 2.
- 3.
.
3. Problem Description
The Lengyel-Epstein reaction-diffusion system effectively captures the fundamental characteristics of the chlorite-iodide-malonic acid (CIMA) reaction observed in an open, unstirred gel reactor. This system initially provided experimental evidence for the existence of Turing patterns in 1990. The model proposed by Lengyel and Epstein is formulated as follows:
Here, denotes a bounded domain in with a sufficiently smooth boundary . The operator represents the Caputo fractional derivative of order ℵ. In this context, signifies the concentration of the activator (iodide), while denotes the inhibitor (chlorite) within the domain . The parameters and correspond to the supply concentration, represents the diffusion coefficient ratio, and is an adjusting parameter influenced by the starch concentration.
Lemma 2 ([
6])
. The system (9) admits a unique solution , defined for all x and . Morover, there exist two positive constants and such that The critical equilibrium point is denoted as
within the Caputo fractional Lengyel-Epstein dynamic system. This equilibrium is determined by solving the following system of Equations (
11):
From [
2], according to Ouannes et al. it is clear that
4. Finite-Time Stability Result
In this section, we establish the necessary prerequisites for ensuring the finite-time stability of the equilibrium point . We begin by introducing various stability criteria:
Lemma 3 ([
24])
. (Poincaré Integral Inequality) is a bounded domain with its smooth boundary that is of . is a real-valued function and . Then,where is a positive eigenvalue of the problem:Here, η is the unit normal vector to .
Theorem 2. The point constitutes a finite-time stable equilibrium for the fractional-order nonlinear systems (9) if the following conditions are satisfied: The finite-time stability of this equilibrium point is characterized by the settling time: Proof. We define a positive Lyapunov function as follows:
Thus, we obtain
where
is the normal derivative. Using Green’s formula in conjunction with the inequalities (
12) and (
13), we derive
According to Lemma 3, we can conclude
Given
and
we have:
Assuming
we find
Let
. Then,
The function
is monotonically decreasing. For
, it follows that
. Moreover,
Here,
termed as the finite-time equilibrium point if there exists
such that
The settling time
is estimated as follows:
Therefore, the equilibrium point
for the nonlinear systems described by system (
9) is stable over a finite period, as stated in Theorem 1. This stability implies that the system remains near the equilibrium point for a finite duration, demonstrating predictability and stability in its behavior. □
5. Finite-Time Synchronization Scheme
The concept of finite-time synchronization in reaction-diffusion systems focuses on achieving rapid synchronization among spatially dispersed elements within a specified time frame. The primary goal is to ensure efficient coherence across the spatial components of the system.
Consider the subsystem of the Lengyel-Epstein reaction-diffusion system described by the following equations:
We examine the discrepancies in synchronization between Equations (
9) and (
29) through the error vector:
In the following discussion, we will identify the linear controllers and , which are designed to drive the error system solution towards zero as t approaches the settling time .
Theorem 3 ([
25])
. Let be a continuous and positive definite function satisfying:where and =Q is a non-negative constant. Then,where is the Mittag-Leffler function and the settling time is given by:Moreover, is positive, and for .
Definition 5 ([
26,
27])
. If there exists a specific time parameter such that:andthen, the master-slave systems (9) and (29) are synchronized in finite time. Theorem 4. The master-slave systems represented by (9) and (29) achieve stable and synchronized states within a finite time frame when the following conditions are satisfied:where and are positive eigenvalues. This can be accomplished by employing a 2-dimensional linear control law:with the settling time defined as: Proof. By incorporating the control described in the theorem into the error system, we derive the following dynamics:
Then, we define a function
as follows:
To compute
using Lemmas 1 and 3 and inequalities (
12) and (
13), we find
From [
28], as the parameter
ℵ gradually approaches 1 from the left side, the fractional derivative operator
tends to converge towards the standard derivative operator
. This convergence suggests or implies something further, likely related to simplification or a change in behavior as the fractional order approaches a whole number.
Denote
we can obtain:
Using Theorem 1, we establish that if the error system (
39) attains a zero solution, it indicates the finite-time stability of the equilibrium point
. Furthermore, by employing Theorem 3, we draw further conclusions:
with the settling-time
Moreover,
is positive and
for
In conclusion, the master-slave systems described by Equations (
9) and (
29) have the capability to achieve synchronization within a finite period of time when subjected to a specific linear control law. Definition 5 outlines the conditions under which synchronization can be achieved within these systems, implying that such synchronization occurs within a finite time frame using the prescribed linear control law. □
6. Numerical Simulations
In this section, two practical scenarios are presented to demonstrate the effectiveness and practicality of the proposed approach, as well as to verify the theoretical findings. The theoretical conclusions are tested through numerical simulations conducted using MATLAB software.
Example 1. We define the domains as follows: and . The parameters are set as:
| Variable | Value |
| 6 |
| 2 |
| 5 |
| 5 |
| 106 |
| 106 |
| 0.995 |
| 100 |
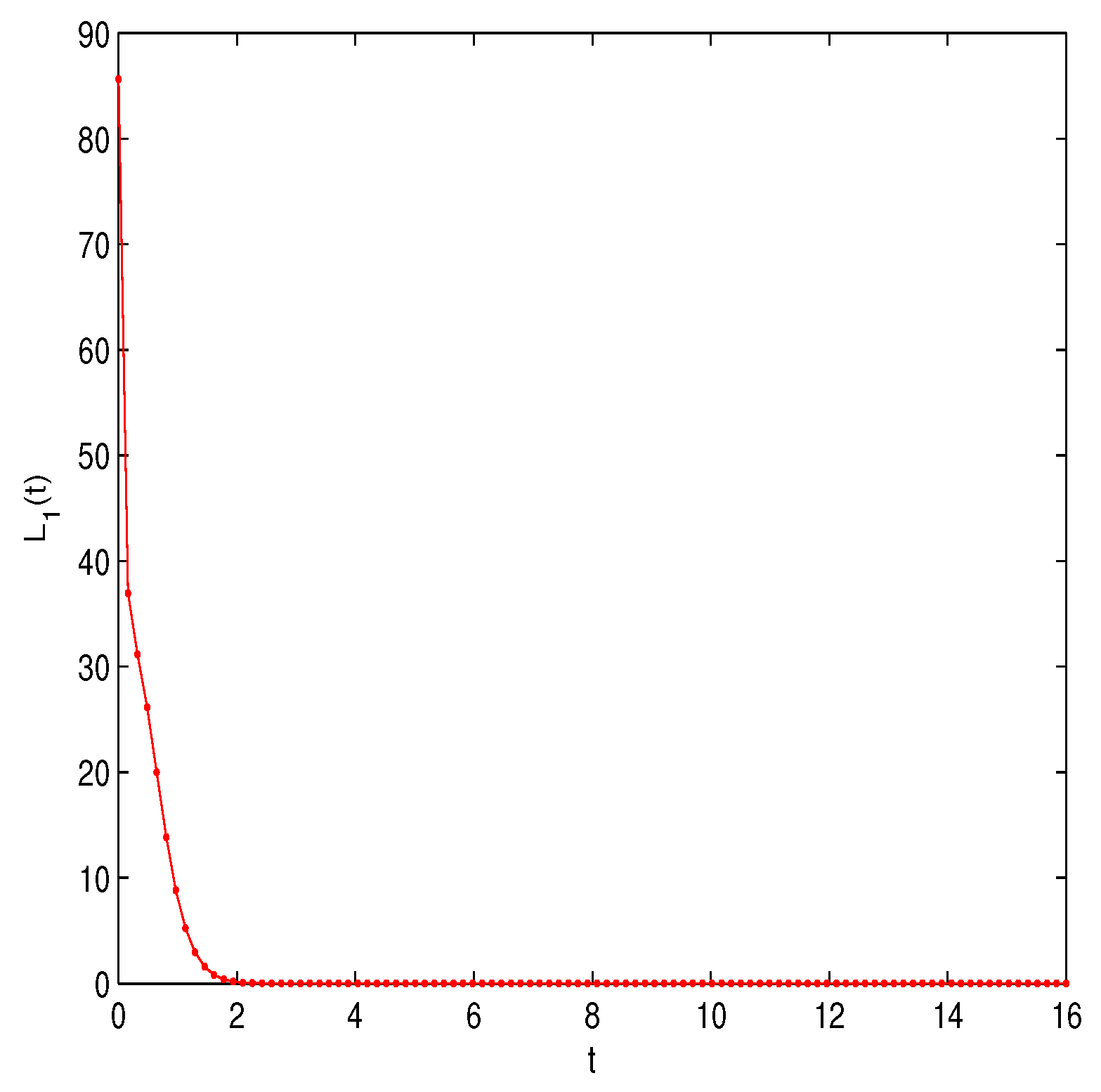
The boundary conditions are given by: The initial conditions are: The point constitutes a finite-time stable equilibrium for the fractional-order nonlinear systems if the conditions of Theorem 2 are satisfied: The finite-time stability of this equilibrium point is characterized by the settling time: Figure 1 illustrate the spatiotemporal solutions of the system under consideration, observed across both spatial and temporal dimensions, while adhering to homogeneous Neumann boundary conditions. The equilibrium point of particular interest, denoted as , is identified based on the principles outlined in Theorem 2. This theorem suggests that the system maintains stability over a finite duration, an assertion we seek to validate through numerical analysis. To substantiate this theoretical proposition, Figure 2 are presented, providing visual representations of the system’s solutions alongside the associated error profiles, focusing specifically on one-dimensional spatial scenarios. These figures offer numerical insights into how deviations between the actual system behavior and its equilibrium state evolve over time. Furthermore, Figure 3 specifically examines the behavior of the Lyapunov function . It demonstrates that as time t approaches the critical value , asymptotically tends toward 0. This observation serves as empirical evidence supporting the finite-time stability of the system at the equilibrium point . Example 2. We define the domain Ω as and t ranges within . The parameters are specified as follows:
| Variable | Value |
| 1 |
| 1 |
| 3 |
| 0.8393 |
| 0.01 |
| 0.01 |
| 0.9995 |
| 100 |
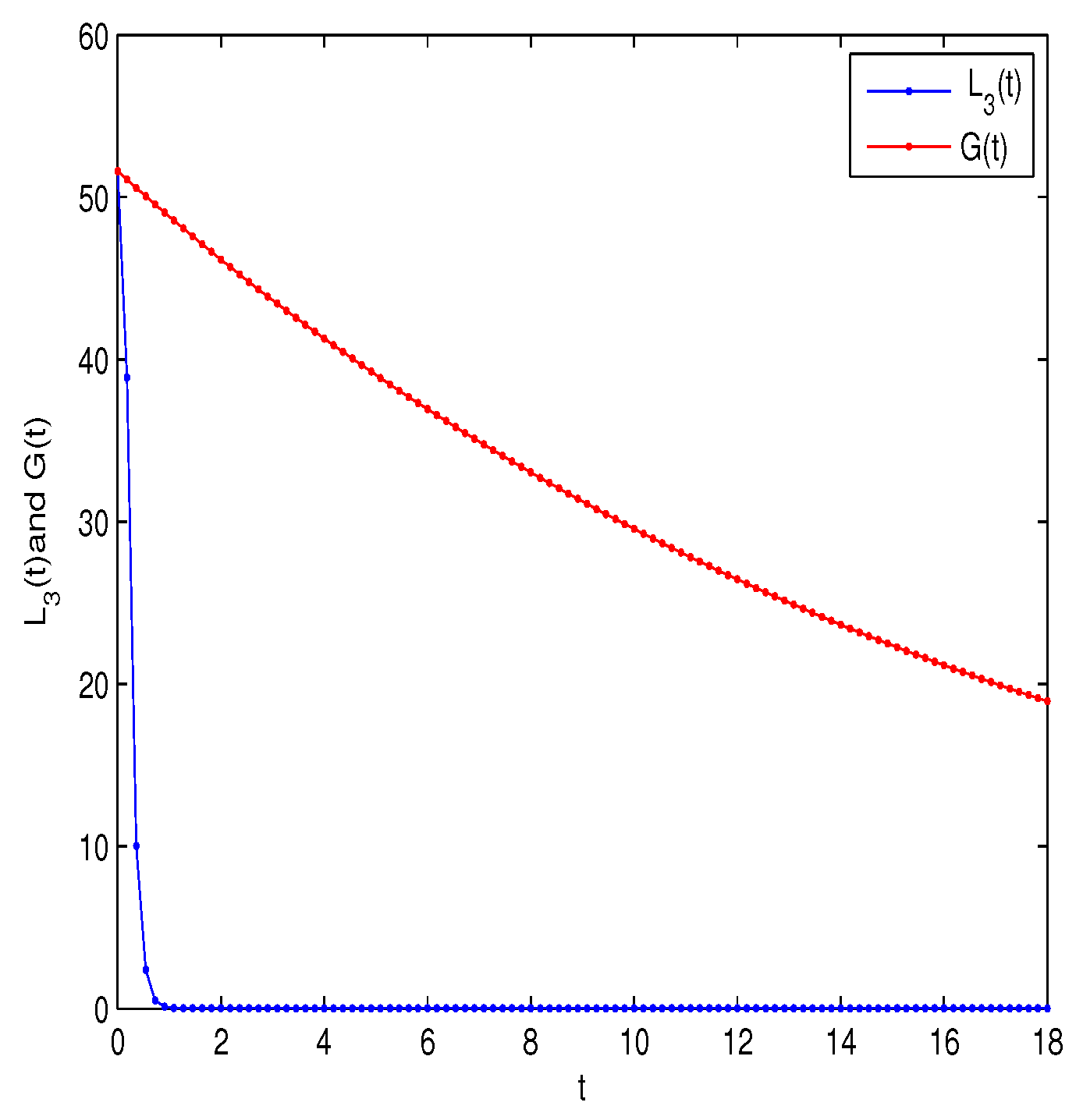
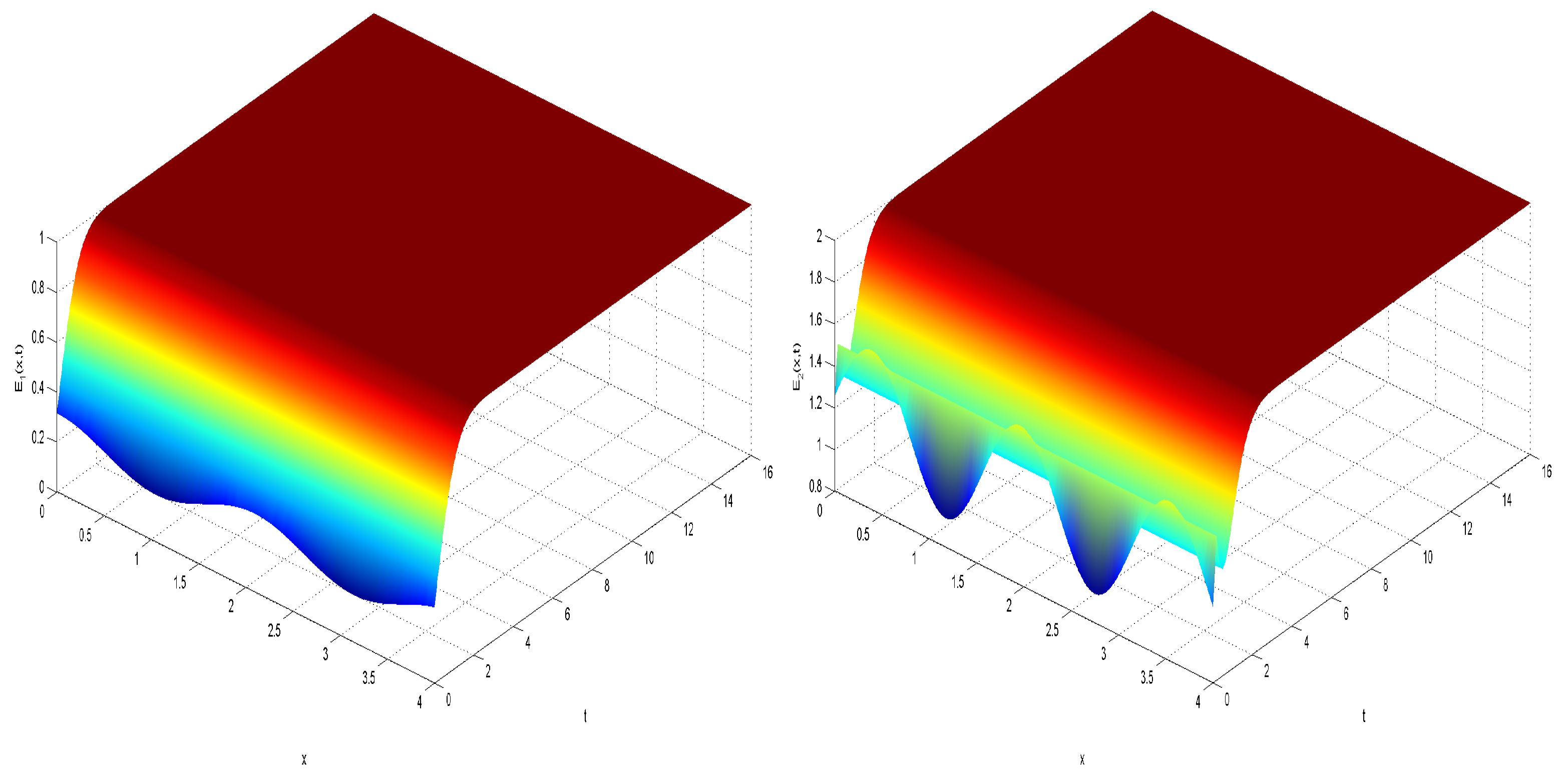
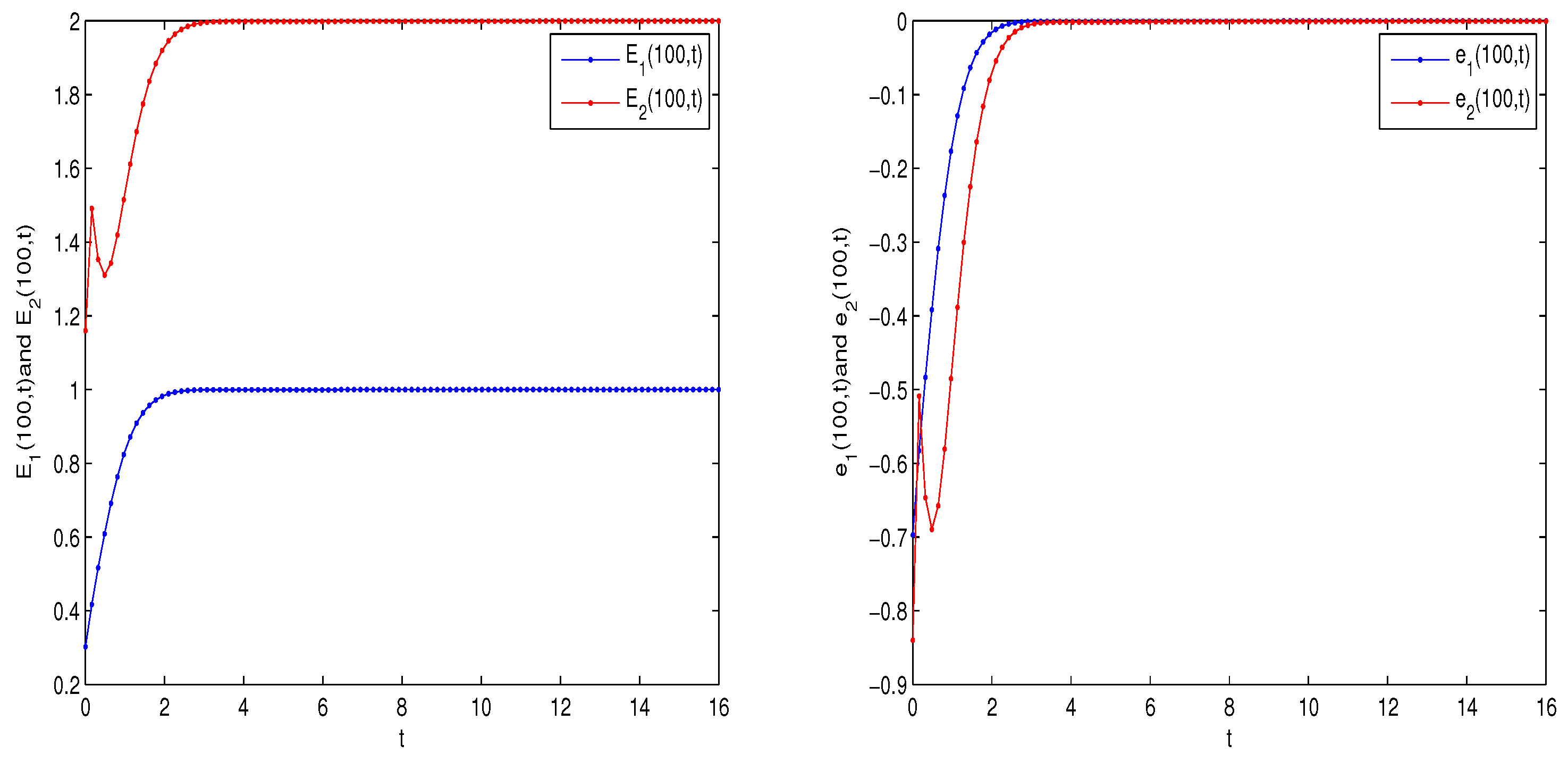
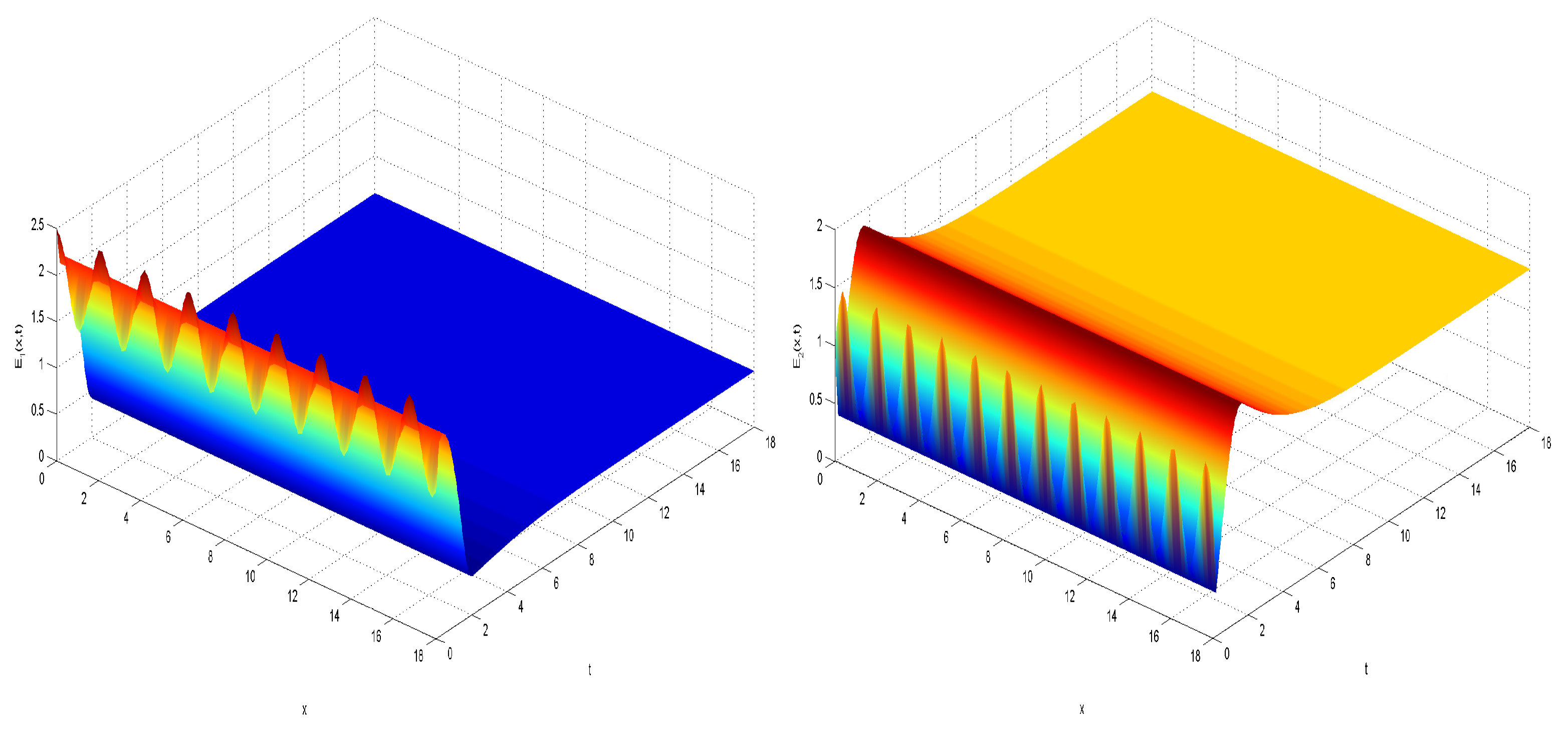
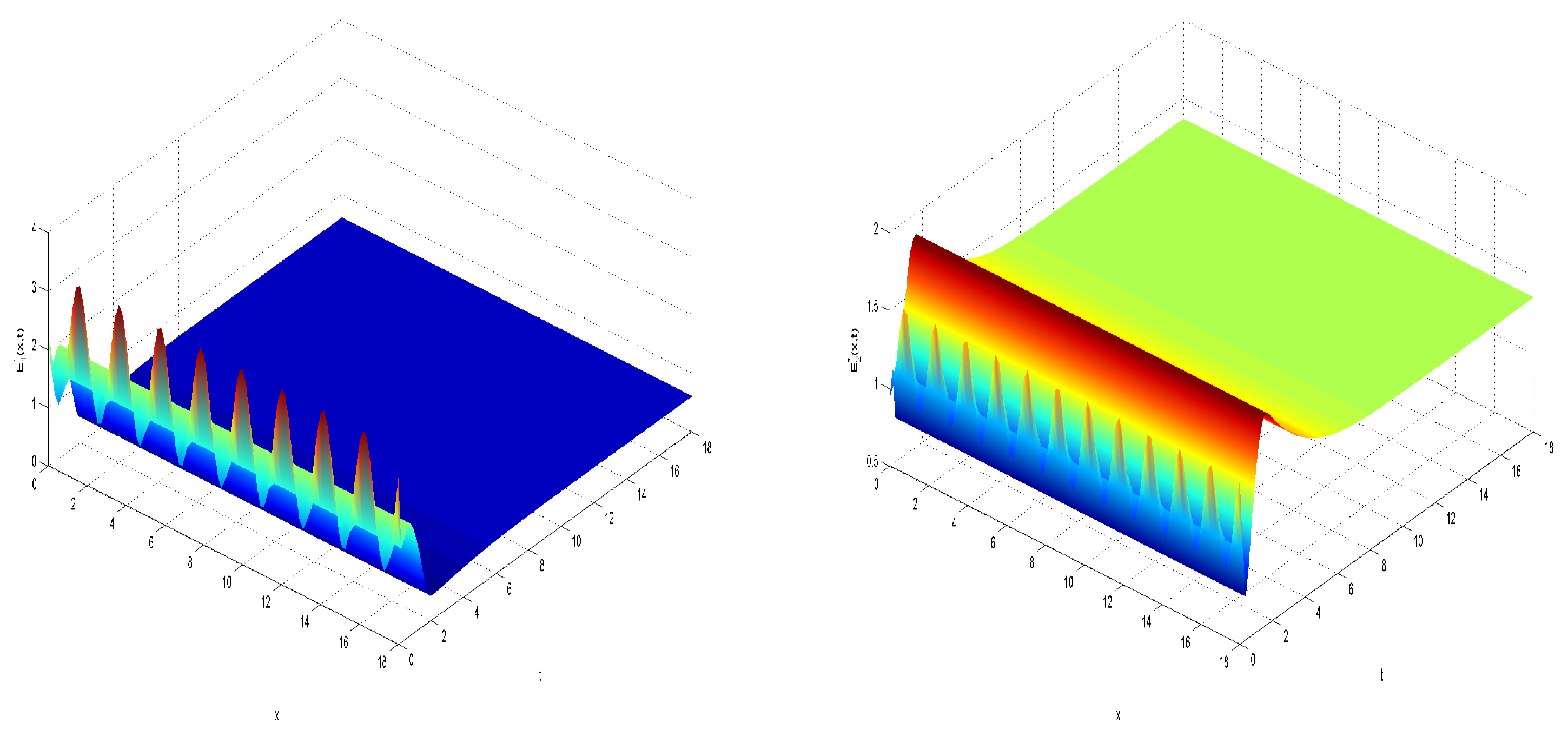
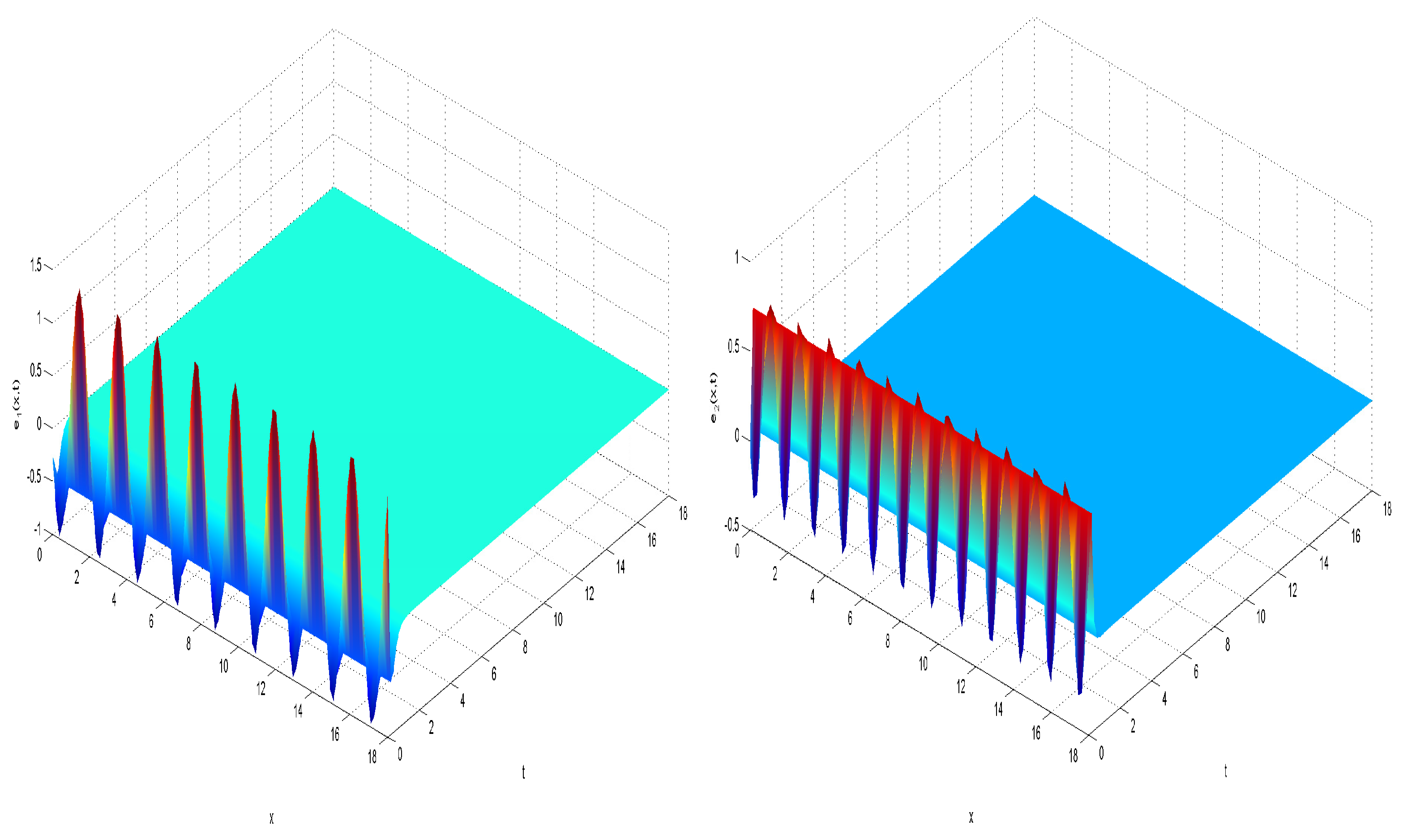
The boundary conditions are given by: Then, we specify the initial conditions for the master-slave systems (9) and (29) as follows:and The master-slave systems (9) and (29) achieve stable and synchronized states within a finite time frame when the conditions of Theorem 4 are satisfied: This is accomplished by employing a 2-dimensional linear control law:wherewith the settling-time where . We can conclude that The analysis of spatiotemporal dynamics in two distinct systems, referenced as (9) and (29), is visually presented in Figure 4, Figure 5 and 7. These figures provide graphical depictions of how these systems behave both in two-dimensional and one-dimensional contexts. They illustrate how the variables evolve over time and space, showing the interaction and synchronization between different components within each system. Furthermore, Figure 6 and Figure 7 offer numerical insights into the spatiotemporal solutions of the error synchronization system (39). These figures demonstrate how discrepancies between the master and slave systems, as represented by the error variables and , diminish over time. Specifically, as time t approaches , the errors converge to zero, indicating that the systems achieve synchronization within a finite time frame. Figure 8 complements these findings by showcasing the behavior of the Lyapunov function . It highlights that steadily approaches zero as t approaches , reinforcing the finite-time stability observed in the synchronization process. Together, these visual and numerical representations provide comprehensive evidence of the finite-time synchronization achieved in the studied systems (9), (29), and (39), offering valuable insights into their spatiotemporal dynamics and stability properties. 7. Conclusions
In this study, the Lengyel-Epstein reaction-diffusion system effectively models the chlorite-iodide-malonic acid (CIMA) reaction, demonstrating the emergence of Turing patterns within a bounded domain. We have established the existence of a unique solution for this system, constrained by positive constants. The equilibrium point serves as a finite-time stable equilibrium under specific conditions regarding the concentrations of the activator and inhibitor. The settling time associated with this stability provides crucial insights into the dynamics of the system. This work lays the foundation for further investigation into finite-time stability and synchronization in reaction-diffusion systems, with potential implications in various fields such as biological pattern formation and chemical processes.
The strategy for achieving finite-time synchronization in reaction-diffusion systems aims to establish rapid coherence among spatially distributed components within a specified time frame. By implementing specific linear controllers and utilizing the Mittag-Leffler function to quantify settling times, we demonstrate that the master-slave systems described by Equations (
9) and (
29) can achieve stable synchronization within finite time intervals. This synchronization is ensured by the designed control laws
and
, which drive the error dynamics to zero as time approaches the respective settling times
and
. The analytical framework, supported by Theorems 3 and 4, provides a rigorous basis for understanding and achieving finite-time synchronization in complex reaction-diffusion systems.
To validate our theoretical findings and demonstrate the practical efficacy of the proposed approach, we conducted numerical simulations using MATLAB. Two distinct scenarios were examined: the first involving a fractional-order nonlinear system and the second focusing on a master-slave system with linear control. These simulations confirmed the finite-time stability and synchronization of both systems, as anticipated by our theoretical analyses. The graphical representations and numerical results presented in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8 provide compelling evidence of the systems’ behaviors over time and space, illustrating their convergence to stable states within defined time frames. These findings substantiate the applicability and robustness of the proposed methodologies in achieving finite-time synchronization in complex dynamical systems.
Author Contributions
Conceptualization, A.O.; Methodology, M.A.H.; Software, G.F.; Validation, I.B.; Investigation, A.O.; Project administration, H.M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article; further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- DeKepper, P.; Epstein, I.R.; Orban, M.; Kustin, K. Batch Oscillations and Spatial Wave Patterns in Chlorite Oscillating Systems. J. Phys. Chem. 1982, 86, 170–171. [Google Scholar] [CrossRef]
- Abu Falahah, I.; Hioual, A.; Al-Qadri, M.O.; AL-Khassawneh, Y.A.; Al-Husban, A.; Hamadneh, T.; Ouannas, A. Synchronization of Fractional Partial Difference Equations via Linear Methods. Axioms 2023, 12, 728. [Google Scholar] [CrossRef]
- Lengyel, I.; Epstein, I.R. Modeling of Turing structures in the chlorite-iodide–malonic acid–starch reaction system. Science 1991, 251, 650–652. [Google Scholar] [CrossRef]
- Lengyel, I.; Epstein, I.R. A chemical approach to designing Turing patterns in reaction-diffusion system. Proc. Nat. Acad. Sci. USA 1992, 89, 3977–3979. [Google Scholar] [CrossRef]
- Lengyel, I.; Rabai, G.; Epstein, I.R. Experimental and modeling study of oscillations in the chlorine dioxide-iodine-malonic acid reaction. J. Am. Chem. Soc. 1990, 112, 9104–9110. [Google Scholar] [CrossRef]
- Ni, W.M.; Tang, M. Turing patterns in the Lengyel–Epstein system for the CIMA reaction. Trans. Amer. Math. Soc. 2005, 357, 3953–3969. [Google Scholar] [CrossRef]
- Yi, F.; Wei, J.; Shi, J. Diffusion-driven instability and bifurcation in the Lengyel–Epstein system. Nonlinear Anal. RWA 2008, 9, 1038–1051. [Google Scholar] [CrossRef]
- Yi, F.; Wei, J.; Shi, J. Global asymptotic behavior of the Lengyel–Epstein reaction–diffusion system. Appl. Math. Lett. 2009, 22, 52–55. [Google Scholar] [CrossRef]
- Lisena, B. On the global dynamics of the Lengyel–Epstein system. Appl. Math. Comput. 2014, 249, 67–75. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, H. Hopf bifurcation and Turing instability of 2–D Lengyel–Epstein system with reaction–diffusion terms. Appl. Math. Comput. 2013, 219, 9229–9244. [Google Scholar] [CrossRef]
- Ouannas, A.; Wang, X.; Pham, V.T.; Grassi, G.; Huynh, V.V. Synchronization results for a class of fractional-order spatiotemporal partial differential systems based on fractional Lyapunov approach. Boundary Value Problems 2019, 2019, 74. [Google Scholar] [CrossRef]
- Abu Hammad, M.; Bendib, I.; Alshanti, W.G.; Alshanty, A.; Ouannas, A.; Hioual, A.; Momani, S. Fractional-Order Degn–Harrison Reaction–Diffusion Model: Finite-Time Dynamics of Stability and Synchronization. Computation 2023, 12, 144. [Google Scholar] [CrossRef]
- Ouannas, A.; Bendoukha, S.; Volos, C.; Boumaza, N.; Karouma, A. Synchronization of fractional hyperchaotic Rabinovich systems via linear and nonlinear control with an application to secure communications. Int. J. Control. Autom. Syst. 2019, 17, 2211–2219. [Google Scholar] [CrossRef]
- Bendoukha, S.; Ouannas, A.; Wang, X.; Khennaoui, A.A.; Phan, V.T.; Grassi, G. The co-existence of different synchronization types in fractional-order discrete-time chaotic systems with non-identical dimensions and order. Entropy 2018, 20, 710. [Google Scholar] [CrossRef] [PubMed]
- Ouannas, A. Co-existence of various types of synchronization between hyperchaotic maps. Nonlinear Dyn. Syst. Theory 2016, 16, 312–321. [Google Scholar]
- Ouannas, A.; Al-sawalha, M.M. On Λ-Ψ generalized synchronization of chaotic dynamical systems in continuous-time. Eur. Phys. J. Spec. Top. 2016, 225, 187–196. [Google Scholar] [CrossRef]
- Hamadneh, T.; Hioual, A.; Alsayyed, O.; Al-Khassawneh, Y.A.; Al-Husban, A.; Ouannas, A. The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation. Axioms 2023, 12, 806. [Google Scholar] [CrossRef]
- Hamadneh, T.; Hioual, A.; Alsayyed, O.; AL-Khassawneh, Y.A.; Al-Husban, A.; Ouannas, A. Local Stability, Global Stability, and Simulations in a Fractional Discrete Glycolysis Reaction–Diffusion Model. Fractal Fract. 2023, 7, 587. [Google Scholar] [CrossRef]
- Ouannas, A.; Abdelmalek, S.; Bendoukha, S. Coexistence of some chaos synchronization types in fractional-order differential equations. Electron. J. Differ. Equ. 2017, 2017, 1–15. [Google Scholar]
- Al-Husban, A.; Djenina, N.; Saadeh, R.; Ouannas, A.; Grassi, G. A New Incommensurate Fractional-Order COVID 19: Modelling and Dynamical Analysis. Mathematics 2023, 11, 555. [Google Scholar] [CrossRef]
- Momani, S.; Shqair, M.; Batihac, I.M.; Abu-Sei’leek, M.H.E.; Alshorm, S.; Abd El-Azeem, S.A. Two–Energy group neutron diffusion model in spherical reactors. Results Nonlinear Anal. 2024, 7, 160–173. [Google Scholar]
- Yaagoub, Z.; Danane, J.; Hammouch, Z.; Allali, K. Mathematical analysis of a fractional order two strain SEIR epidemic model. Results Nonlinear Anal. 2024, 7, 156–175. [Google Scholar]
- Feng, Z.; Xiang, Z. Finite-time stability of fractional-order nonlinear systems. Chaos 2024, 34, 023105. [Google Scholar] [CrossRef]
- Rao, R.; Lin, Z.; Ai, X.; Wu, J. Synchronization of Epidemic Systems with Neumann Boundary Value under Delayed Impulse. Mathematics 2022, 10, 2064. [Google Scholar] [CrossRef]
- Jiang, J.; Li, H.; Zhao, K.; Cao, D.; Guirao, L.G. Finite time stability and sliding mode control for uncertain variable fractional order nonlinear systems. Adv. Differ. Equ. 2021, 2021, 127. [Google Scholar] [CrossRef]
- Wang, L.; Yang, X.; Liu, H.; Chen, X. Synchronization in Finite Time of Fractional-Order Complex-Valued Delayed Gene Regulatory Networks. Fractal Fract. 2023, 7, 347. [Google Scholar] [CrossRef]
- Li, Y.; Yang, X.; Shi, L. Finite-time synchronization for competitive neural networks with mixed delays and non-identical perturbations. Neurocomputing 2016, 185, 242–253. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}