Agent-Based Simulation of Children’s School Travel Mode with Parental Escort Decisions

Abstract
1. Introduction
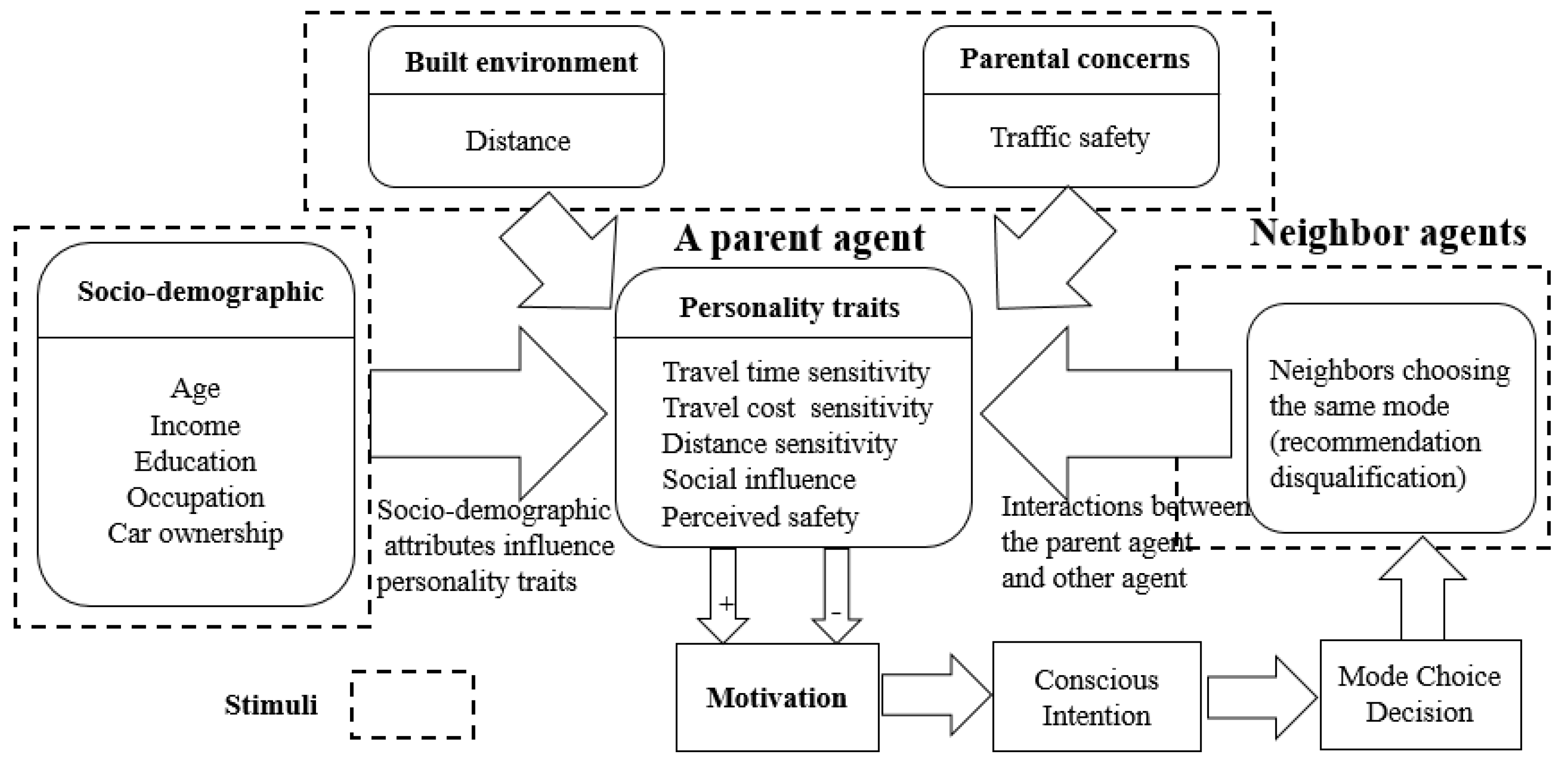
2. An Agent-Based Model of the School Travel Mode with Parental Escort Decisions
2.1. The Theoretical Framework for the School Travel Mode with Parental Escort
2.2. The Escort Mode Choice Motivation Model
2.3. The Escort Mode Choice Decision Model
2.4. The Escort Mode Choice Motivation Adjustment Function
3. Data
3.1. Questionnaire
3.2. Sample Characteristics and Descriptives
4. Agent-Based Model of the School Travel Mode with Parental Escort Decisions
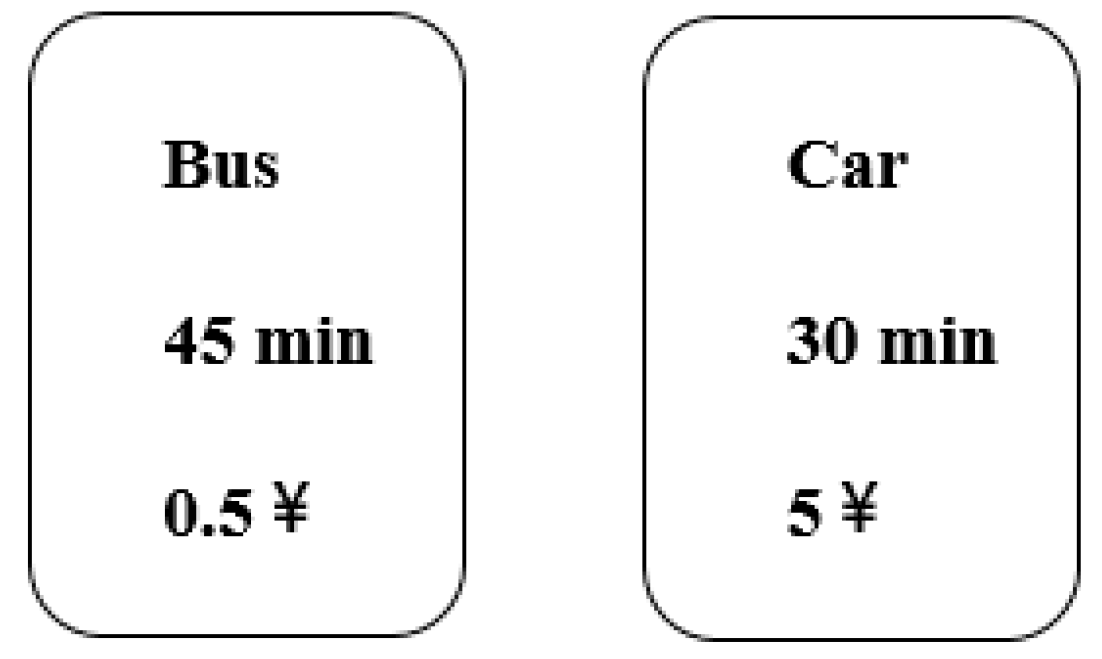
4.1. The Decoy Effect
4.2. The Mathematical Analysis of an Individual Decoy Effect
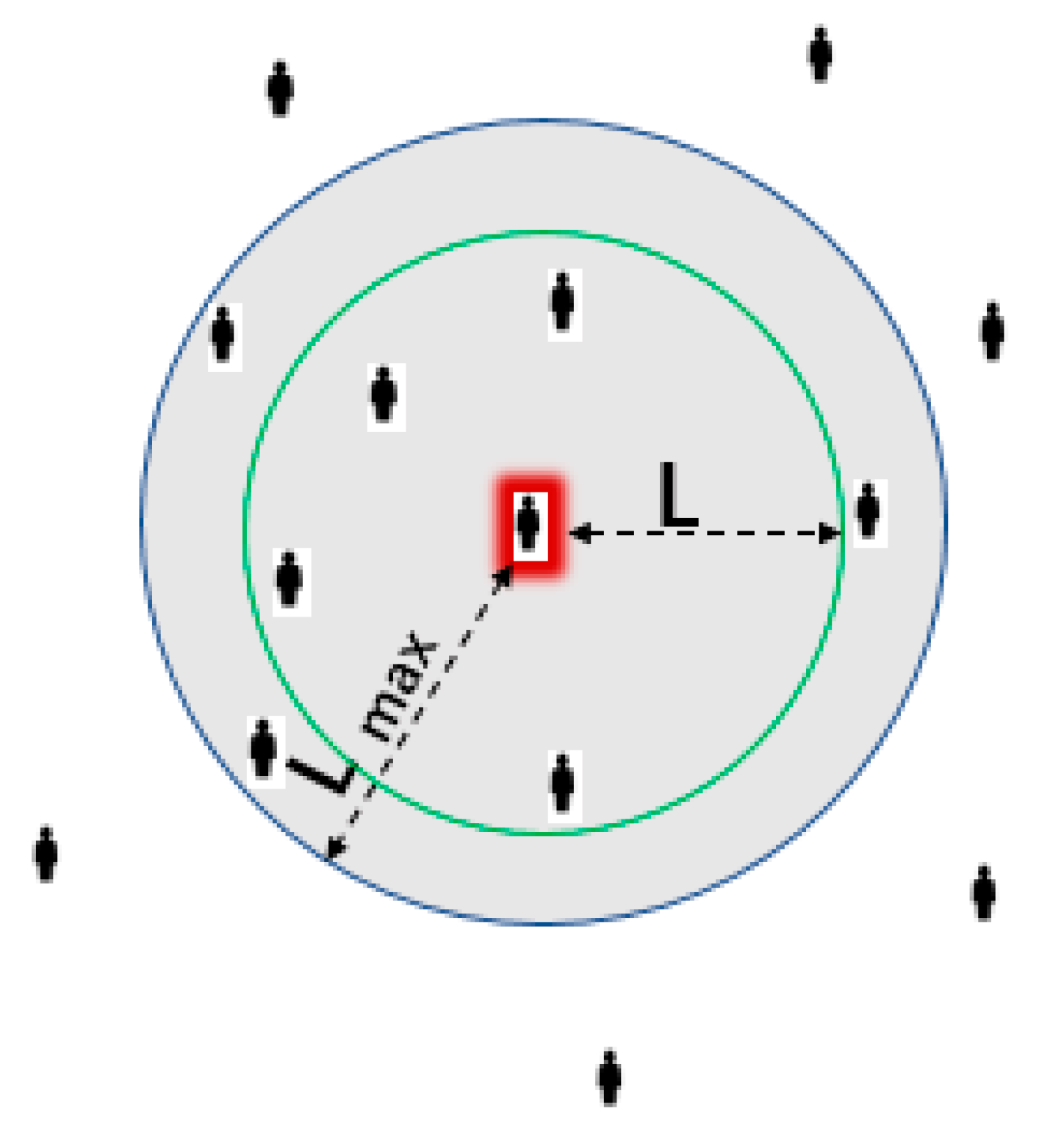
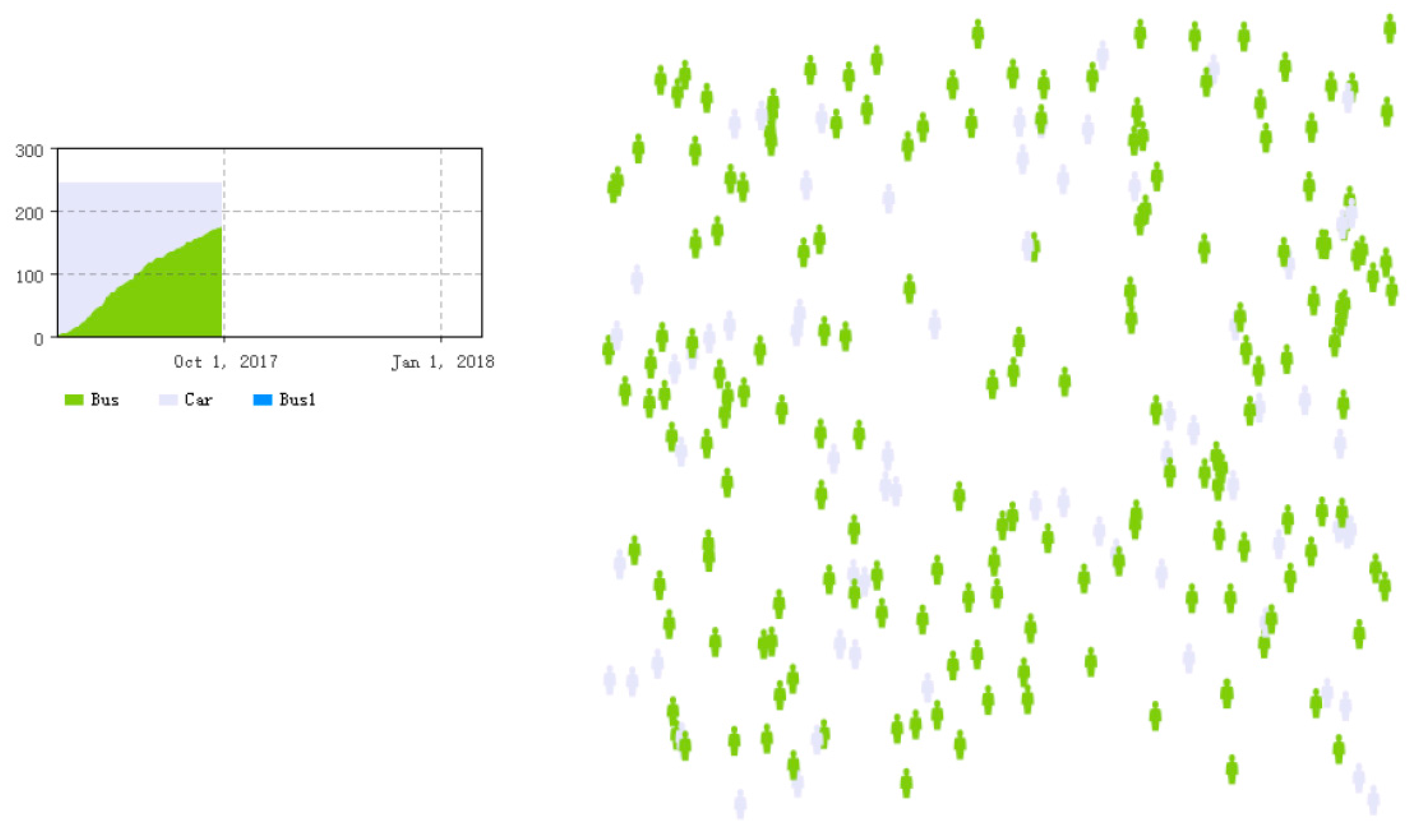
4.3. The Simulation Experiments
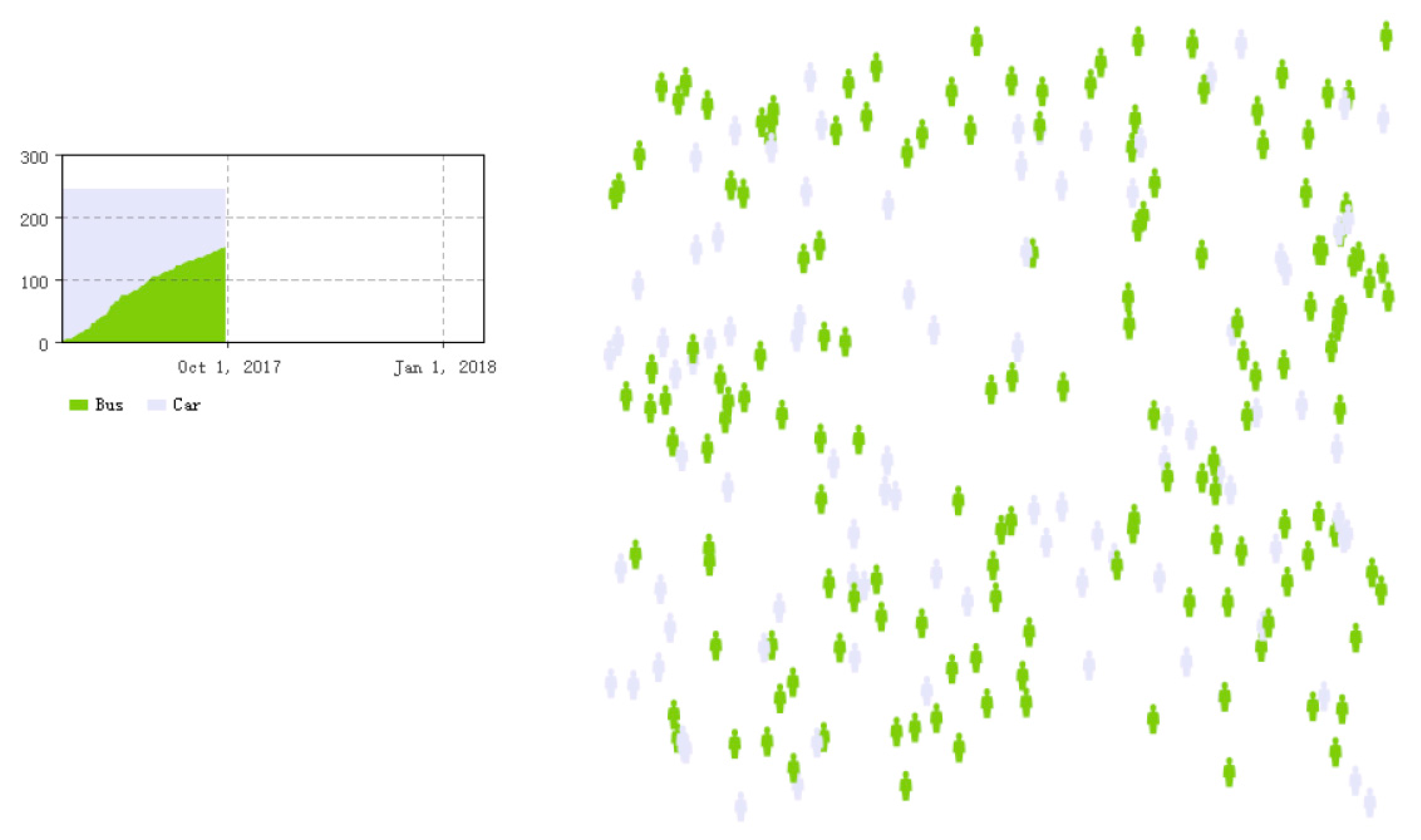
4.4. Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Mcdonald, N.C. Children’s Travel: Patterns and Influences. Available online: https://escholarship.org/uc/item/51c9m01c (accessed on 24 February 2018).
- Yarlagadda, A.K.; Srinivasan, S. Modeling children’s school travel mode and parental escort decisions. Transportation 2008, 35, 201–218. [Google Scholar] [CrossRef]
- Faulkner, G.E.J.; Buliung, R.N.; Flora, P.K.; Fusco, C. Active school transport, physical activity levels and body weight of children and youth: A systematic review. Prev. Med. 2009, 48, 3. [Google Scholar] [CrossRef] [PubMed]
- Fusco, C.; Moola, F.; Faulkner, G.; Buliung, R.; Richichi, V. Toward an understanding of children’s perceptions of their transport geographies: (Non)active school travel and visual representations of the built environment. J. Transp. Geogr. 2012, 20, 62–70. [Google Scholar] [CrossRef]
- He, S.Y.; Giuliano, G. Factors affecting children’s journeys to school: A joint escort-mode choice mode. Transportation 2017, 44, 199–224. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E.; Liu, Z. School travel mode choice in Beijing, China. J. Transp. Geogr. 2017, 62, 98–110. [Google Scholar] [CrossRef]
- Shi, J.; Jian, M.; Zhang, W. Research on the influence of student motor vehicle on Beijing road traffic. J Wuhan Univ. Technol. 2014, 5, 960–964. [Google Scholar]
- Leslie, E.; Kremer, P.; Toumbourou, J.W.; Williams, J.W. Gender differences in personal, social and environmental influences on active travel to and from school for Australian adolescents. J Sci. Med. Sport 2010, 13, 597–601. [Google Scholar] [CrossRef] [PubMed]
- Ermagun, A.; Samimi, A. How Are Children Accompanied to School? J. Urban Plan. Dev. 2016, 142, 04016002. [Google Scholar] [CrossRef]
- Wets, G.; Zwerts, E. Children’s Travel Behavior: World of Difference. In Proceedings of the Transportation Research Board 85th Annual Meeting, Washington, DC, USA, 22–26 January 2006. [Google Scholar]
- Nelson, N.M.; Foley, E.; O’Gorman, D.J.; Moyna, N.M.; Woods, C.B. Active commuting to school: How far is too far? Int. J. Behav. Nutr. Phys. Act. 2008, 5, 1. [Google Scholar] [CrossRef] [PubMed]
- Mehdizadeh, M.; Nordfjaern, T.; Mamdoohi, A.R.; Mohaymany, A.S. The role of parental risk judgements, transport safety attitudes, transport priorities and accident experiences on pupils’ walking to school. Accid. Anal. Prev. 2017, 102, 60–71. [Google Scholar] [CrossRef] [PubMed]
- Hsu, H.P.; Saphores, J.D. Impacts of parental gender and attitudes on children’s school travel mode and parental chauffeuring behavior: Results for California based on the 2009 National Household Travel Survey. Transportation 2014, 41, 543–565. [Google Scholar] [CrossRef]
- Liu, S.; Murray-Tuite, P.; Schweitzer, L. Analysis of child pick-up during daily routines and for daytime no-notice evacuations. Transp. Res. Policy Pract. 2012, 46, 48–67. [Google Scholar] [CrossRef]
- Ermagun, A.; Levinson, D. Intra-household bargaining for school trip accompaniment of children: A group decision approach. Transp. Res. Policy Pract. 2016, 94, 222–234. [Google Scholar] [CrossRef]
- Susilo, Y.O.; Liu, C. The influence of parents’ travel patterns, perceptions and residential self-selectivity to their children travel mode shares. Transportation 2016, 43, 357–378. [Google Scholar] [CrossRef]
- Macal, C.M.; North, M.J. Agent-based modeling and simulation. In Proceedings of the Winter Simulation Conference, Austin, TX, USA, 13–16 December 2009; pp. 86–98. [Google Scholar]
- Han, Q.; Arentze, T.; Timmermans, H.; Janssens, D.; Wets, G. The effects of social networks on choice set dynamics: Results of numerical simulations using an agent-based approach. Transp. Res. 2011, 45, 310–322. [Google Scholar] [CrossRef]
- Yang, Y.; Diez-Roux, A.V. Using an agent-based model to simulate children’s active travel to school. Int. J. Behave. Nutr. Phys. Act. 2013, 10, 67. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Roux, A.V.D.; Auchincloss, A.H.; Rodriguez, D.A.; Brown, D.G. A spatial agent-based model for the simulation of adults’ daily walking within a city. Am. J. Prev. Med. 2011, 40, 353–361. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Diez-Roux, A.; Evenson, K.R.; Colabianchi, N. Examining the impact of the walking school bus with an agent-based model. Am. J. Public Health 2014, 104, 1196–1203. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I. The theory of planned behavior. Br. J. Soc. Psychol. 1991, 14, 137. [Google Scholar] [CrossRef]
- Petty, R.E.; Wegener, D.T.; Fabrigar, L.R. Attitudes and attitude change. Annu. Rev. Psychol. 2010, 48, 479–523. [Google Scholar] [CrossRef] [PubMed]
- Mcclelland, D.C. Human Motivation; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Kamargianni, M.; Dubey, S.; Polydoropoulou, A.; Bhat, C. Investigating the subjective and objective factors influencing teenagers’ school travel mode choice––An integrated choice and latent variable model. Transp. Res. Policy Pract. 2015, 78, 473–488. [Google Scholar] [CrossRef]
- Davison, K.K.; Werder, J.L.; Lawson, C.T. Peer reviewed: Children’s active commuting to school: Current knowledge and future directions. Prev. Chronic Dis. 2008, 5, A100. [Google Scholar] [PubMed]
- Sunitiyoso, Y. Social Interaction in Travel Behaviour: Insights for Developing Effective Travel Demand Management for Indonesia. Syst. Sci. Complex Policy Mak. 2016, 65–91. [Google Scholar] [CrossRef]
- McFadden, D. Sociality, rationality, and the ecology of choice. In Choice Modelling: The State-of-the-Art and the State-of-Practice: Proceedings from the Inaugural International Choice Modelling Conference; Emerald Group Publishing: Bradford, UK, 2010; pp. 1–17. [Google Scholar]
- Guevara, C.A.; Fukushi, M. Modeling the decoy effect with context-RUM Models: Diagrammatic analysis and empirical evidence from route choice SP and mode choice RP case studies. Transp. Res. Methodol. 2016, 93, 318–337. [Google Scholar] [CrossRef]
- Watts, D.J.; Strogatz, S.H. Collective dynamics of ‘small-world’ networks. Nature 1998, 393, 440. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Citation | Children Sample | Sample Size | Method | Travel Modes |
|---|---|---|---|---|
| He et al. (2017) | Age 5–18 years old | 3169 | Multinomial logit | Active commuting, bus, car |
| Mehdizadeh et al. (2017) | Age 7–9 years old | 735 | Mixed logit model | School service modes, household private cars, motorcycles, walking and buses. |
| Ermagun et al. (2016) | Age 6–18 years old | 1737 | Multitude of statistical | Active, auto, public transit, school bus |
| Ermagun et al. (2016) | Age 6–18 years old | 3441 | Three-level nested logit | Active, car, public transport |
| Susilo et al. (2016) | Age 5–15 years old | 30,645 | Structural equation modelling | Active, car, public transport |
| Hsu et al. (2014) | Age 5–15 years old | 729 | Binary logit model Multinomial logit model | Active commuting |
| Liu et al. (2012) | Age 6–18 years old | 183 | Binary logit mode | Active commuting |
| Nelson et al. (2008) | Age 15–17 years old | 4013 | bivariate logistic regression | Active commuting |
| Zwerts and Wet (2006) | Age 10–13 years old | 2482 | Cluster analysis | Active commuting |
| Variable | Measure | Scale or Response Category |
|---|---|---|
| Explicit variable | Children characteristics | - |
| Children’s gender | 2 Alternatives | |
| School grade of the children | Continuous variable | |
| Children’s age | Continuous variable | |
| Socio-economic and household characteristics | - | |
| Parental age | 5 Alternatives | |
| Parental gender | 2 Alternatives | |
| Parental education status | 5 Alternatives | |
| Parental occupation | 6 Alternatives | |
| Income of the whole household per month | 5 Alternatives | |
| The number of cars owned by households | Continuous variable | |
| Parental driving license status | Yes/no | |
| School characteristics | - | |
| Distance from home to school | 4 Alternatives | |
| Parental perceived travel cost from home to school | Continuous variable | |
| Parental perceived travel time from home to school | Continuous variable | |
| Primary escort modes | - | |
| Bus, car | 2 Alternatives | |
| Psychological factors | Travel safety | - |
| Perceived safety from the home to school | 5 point-Likert scale, strongly disagree to strongly agree | |
| Social influence | - | |
| How do you feel about the security of the various escort mode? | 5 point-Likert scale, strongly disagree to strongly agree | |
| The security of the escort is your primary concern? | 5 point-Likert scale, strongly disagree to strongly agree | |
| The influence of your friend on the choice of your escort? | 5 point-Likert scale, strongly disagree to strongly agree |
| Variable | Description | Mean | SD | Min | Max |
|---|---|---|---|---|---|
| Children gender | Boy = 1, girl = 2 | 1.63 | 0.54 | 1 | 2 |
| School grade of the children | Continuous variable | 5.62 | 1.36 | 1 | 9 |
| Children’s age | Continuous variable | 9.71 | 1.77 | 1 | 15 |
| Parental age | 20 < age ≤ 25 Age = 1 26 < age ≤ 30 Age = 2 31 < age ≤ 35 Age = 3 36 < age ≤ 40 Age = 4 >40 Age = 5 | 2.70 | 1.25 | 1 | 5 |
| Parental gender | Male = 1, Female = 2 | 1.56 | 0.49 | 1 | 2 |
| Parental education status | Primary school = 1 Junior school = 2 High school = 3 Undergraduate = 4 Graduate = 5 | 2.89 | 1.15 | 1 | 5 |
| The number of cars owned by households | Continuous variable | 1.53 | 0.46 | 0 | 3 |
| Parental driving license status | Yes = 1, No = 2 | 1.48 | 0.50 | 1 | 2 |
| Distance from home to school | <0.5 Dis = 1 0.5 < d ≤ 2 Dis = 2 2 < d ≤ 4 Dis = 3 >4 Dis = 4 | 2.54 | 1.32 | 1 | 4 |
| Parental perceived travel cost from home to school | Continuous variable | 5.36 | 1.20 | 1 | 10 |
| Parental perceived travel time from home to school | Continuous variable | 8.62 | 5.27 | 1 | 20 |
| Variables/Parameters | Scale | Distribution |
|---|---|---|
| t | 0–100 | Depends on parental month income |
| c | 0–100 | Depends on parental month income |
| PD | 0–1 | Depends on distance from home to school |
| β (DisEffectiveness) | 0–1 | Depends on distance from home to school |
| C (ContactRate) | 0–0.1 | Depends on distance of agents |
| S (SafetyEffectiveness) | 0–1 | Random normal distribution |
| TCAR | 10–60 (min) | Depends on distance from home to school |
| CCAR | 0–20 (yuan) | Depends on distance from home to school |
| TBUS | 10–60 (min) | Depends on distance from home to school |
| CBUS | 0–20 (yuan) | Depends on distance from home to school |
| TDECOY | TDECOY = TBUS | Random normal distribution |
| CDECOY | CCAR > CDECOY > CBUS | Random normal distribution |
| L | 0–100 | Random normal distribution |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, P.; You, Q.; Chen, L. Agent-Based Simulation of Children’s School Travel Mode with Parental Escort Decisions. Information 2018, 9, 50. https://doi.org/10.3390/info9030050
Jing P, You Q, Chen L. Agent-Based Simulation of Children’s School Travel Mode with Parental Escort Decisions. Information. 2018; 9(3):50. https://doi.org/10.3390/info9030050
Chicago/Turabian StyleJing, Peng, Qingku You, and Long Chen. 2018. "Agent-Based Simulation of Children’s School Travel Mode with Parental Escort Decisions" Information 9, no. 3: 50. https://doi.org/10.3390/info9030050
APA StyleJing, P., You, Q., & Chen, L. (2018). Agent-Based Simulation of Children’s School Travel Mode with Parental Escort Decisions. Information, 9(3), 50. https://doi.org/10.3390/info9030050