A Routing Protocol Based on Received Signal Strength for Underwater Wireless Sensor Networks (UWSNs)

Abstract
:1. Introduction
- We provide a method to construct the vector with the least energy consumption from the source node to a sink node independent of location information, and this is suitable for networks with both a single sink node and multiple sink nodes.
- We propose RSS as the parameter to select next-hop. RSS can not only reflect propagation distance but also noise power, which decreases delay and saves on energy consumption.
- We consider void node and energy threshold in our protocol to avoid data packets being delivered to the nodes in a void area or without sufficient residual energy.
- We establish mathematical models to analyze the energy-efficiency and robustness of RRSS.
2. Related Works
3. RRSS Protocol
3.1. Motivation
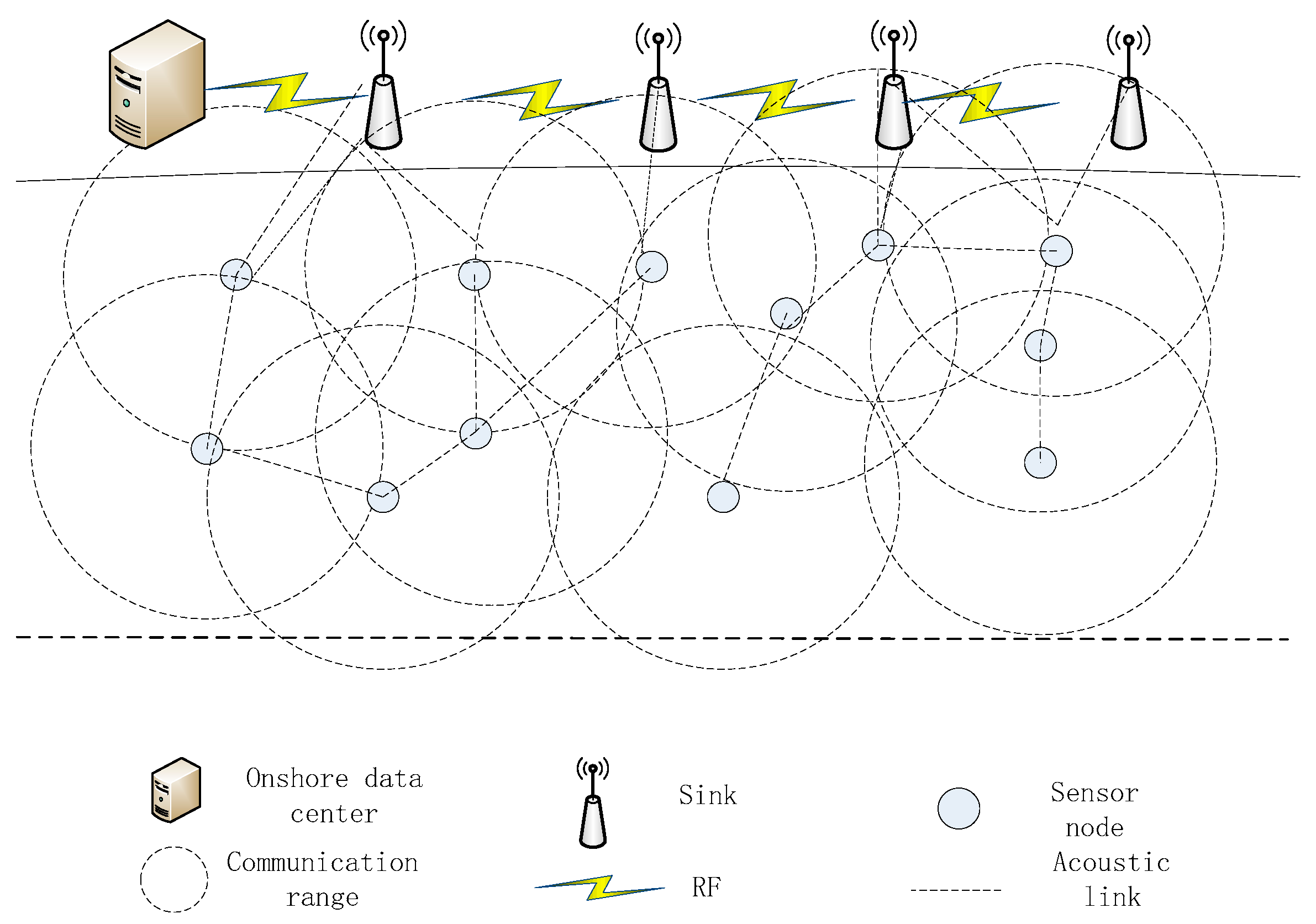
3.2. Network Structure
3.3. RRSS Scheme
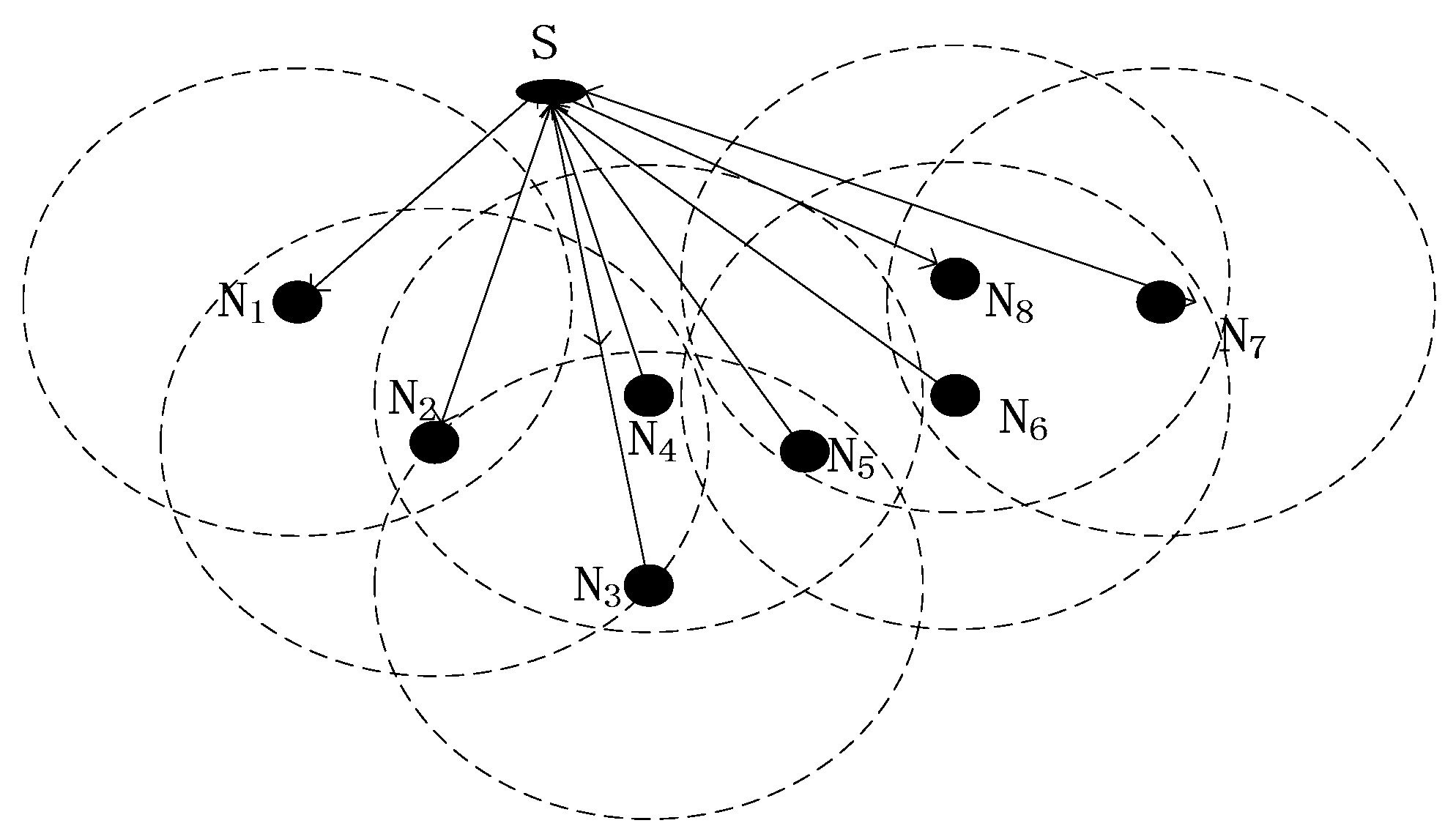
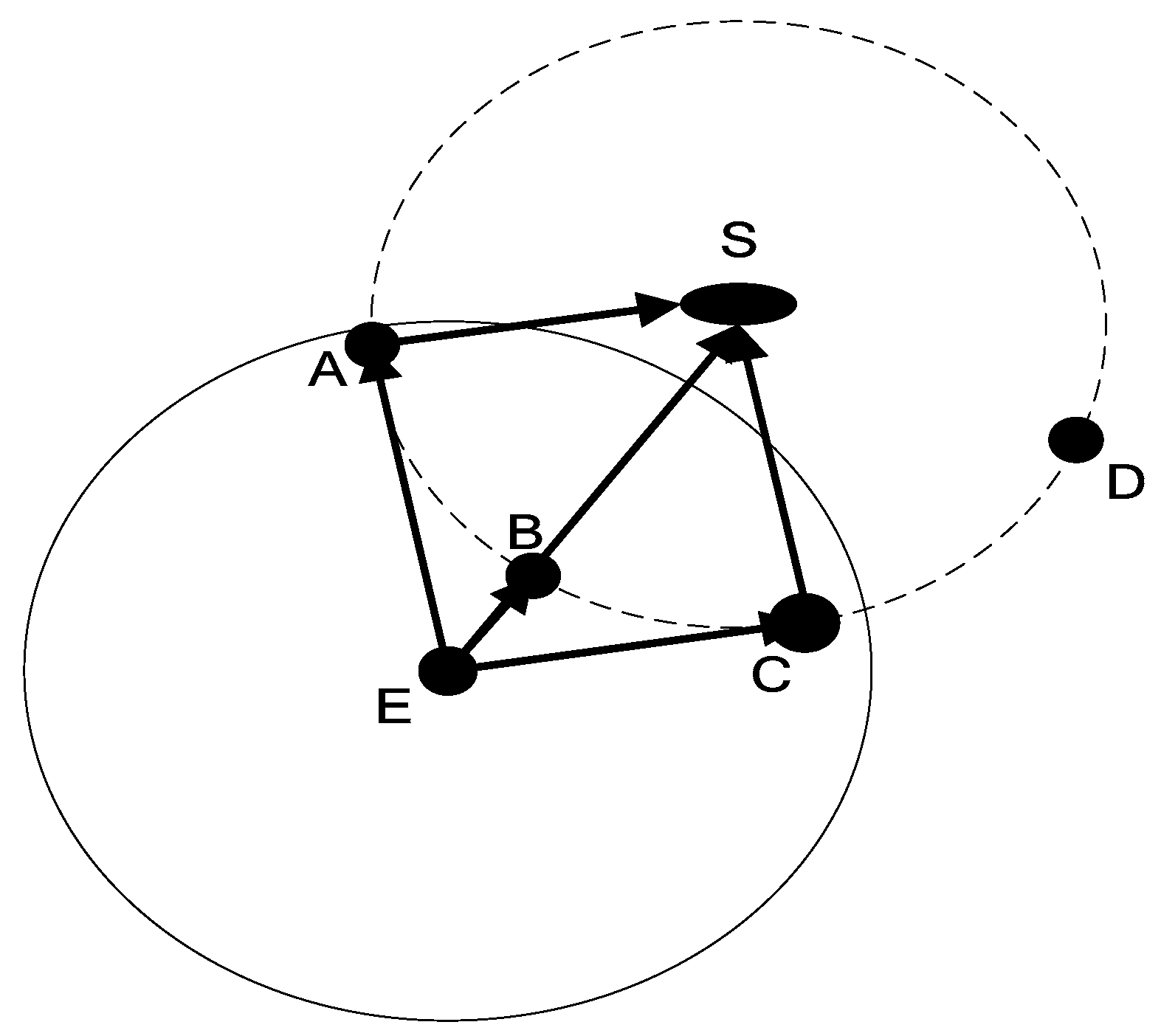
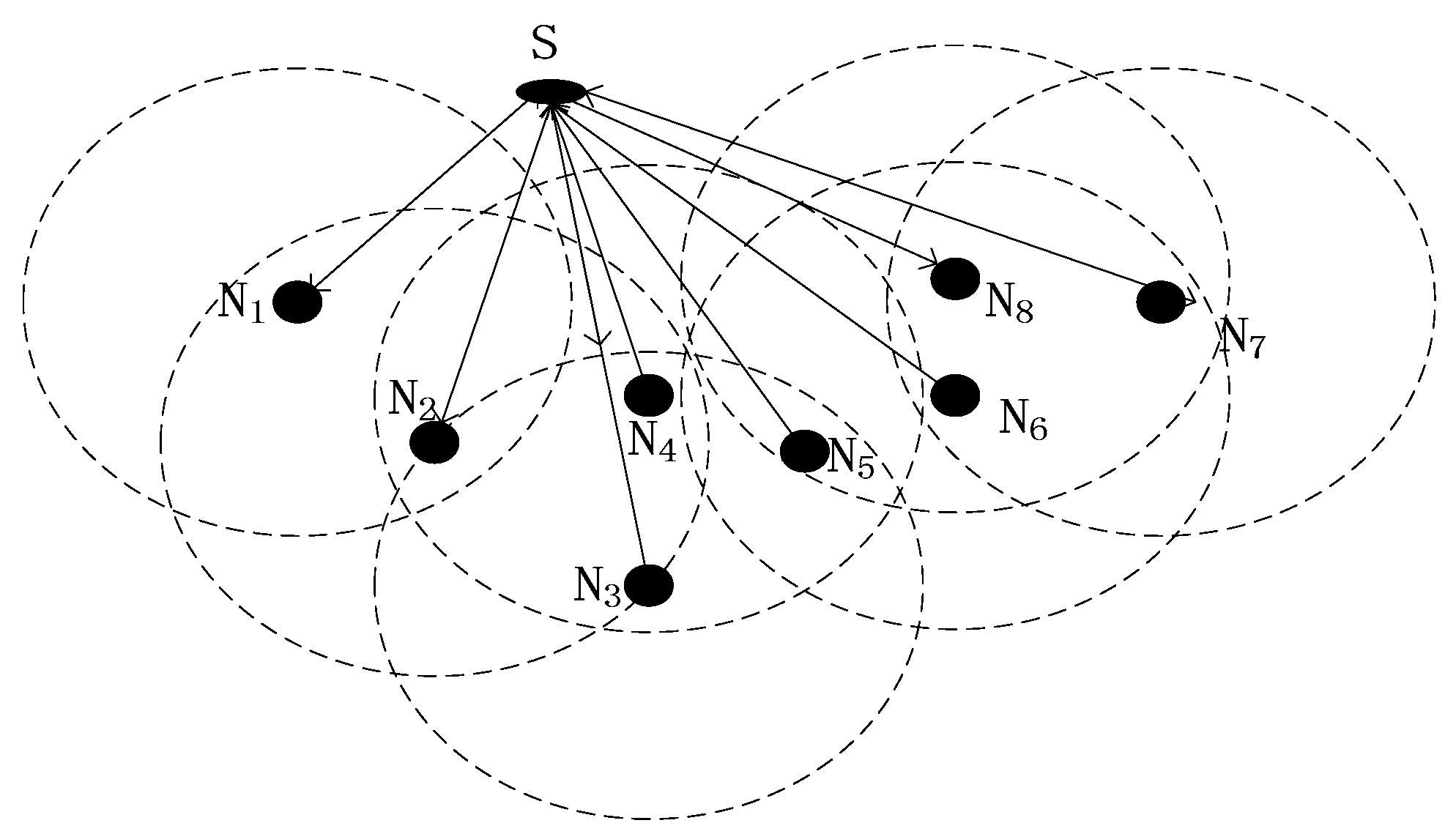
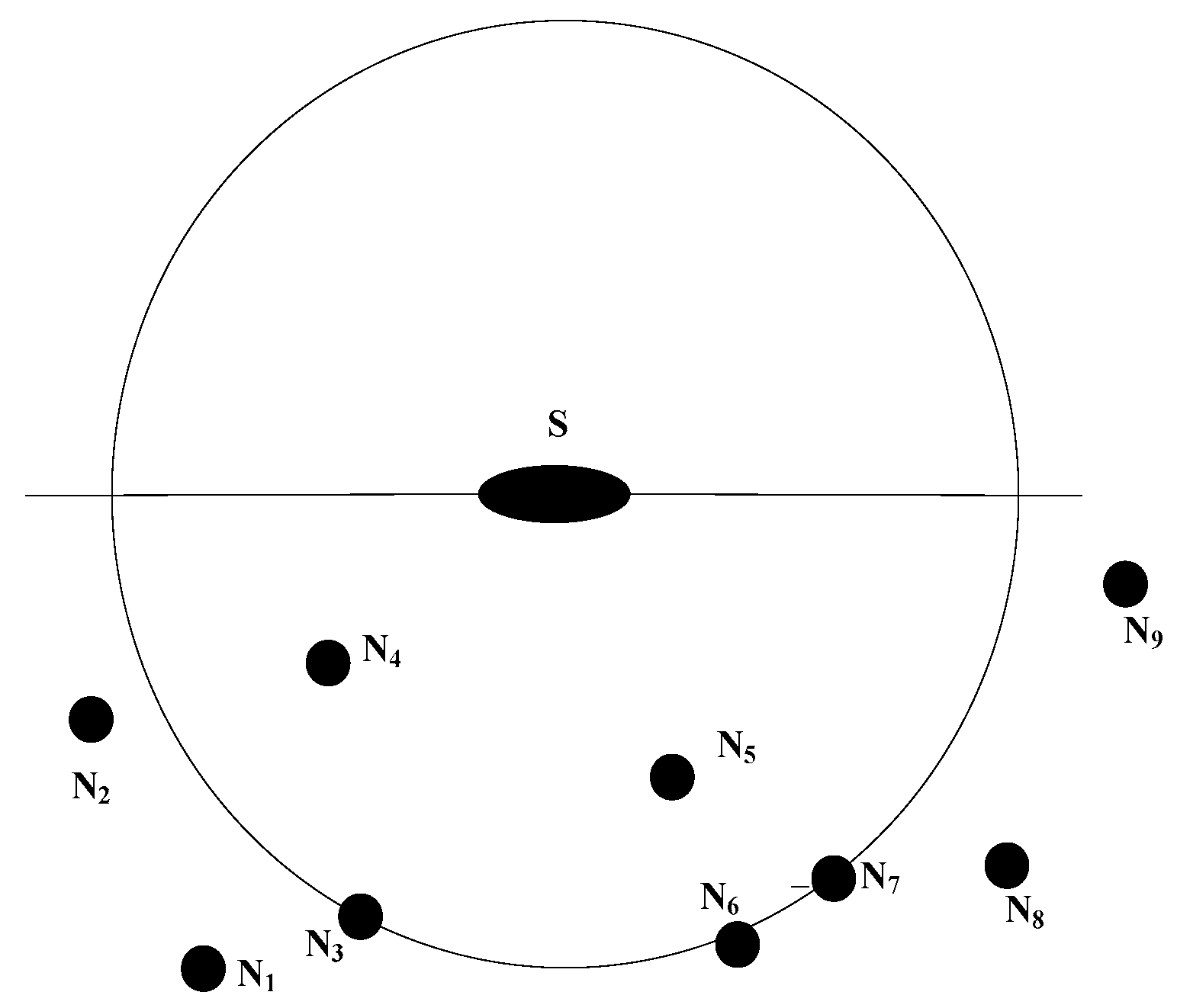
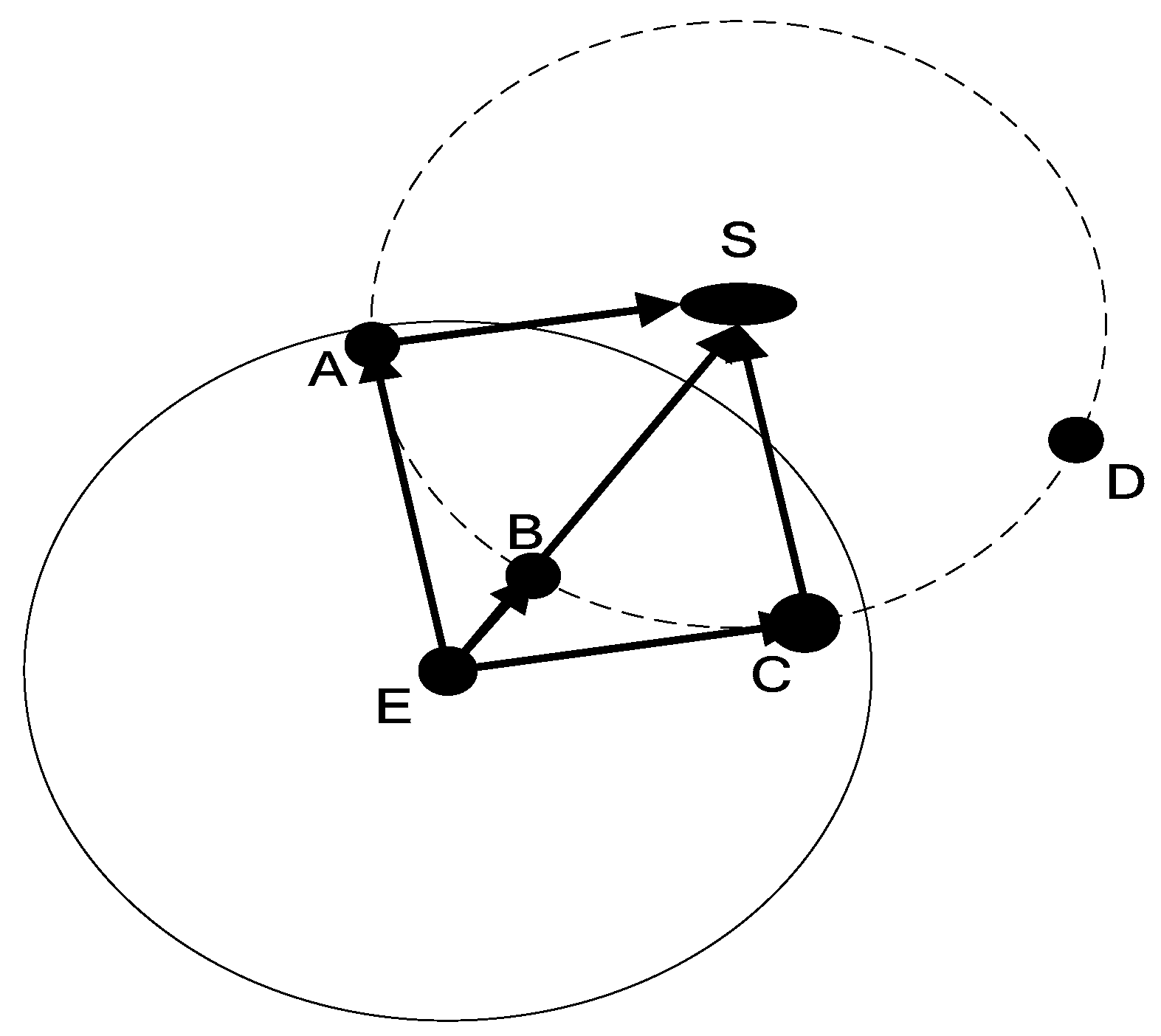
- Void node: The RSSB of a void node is stronger than that of its neighbors, but all the sink nodes are outside of its transmission range.
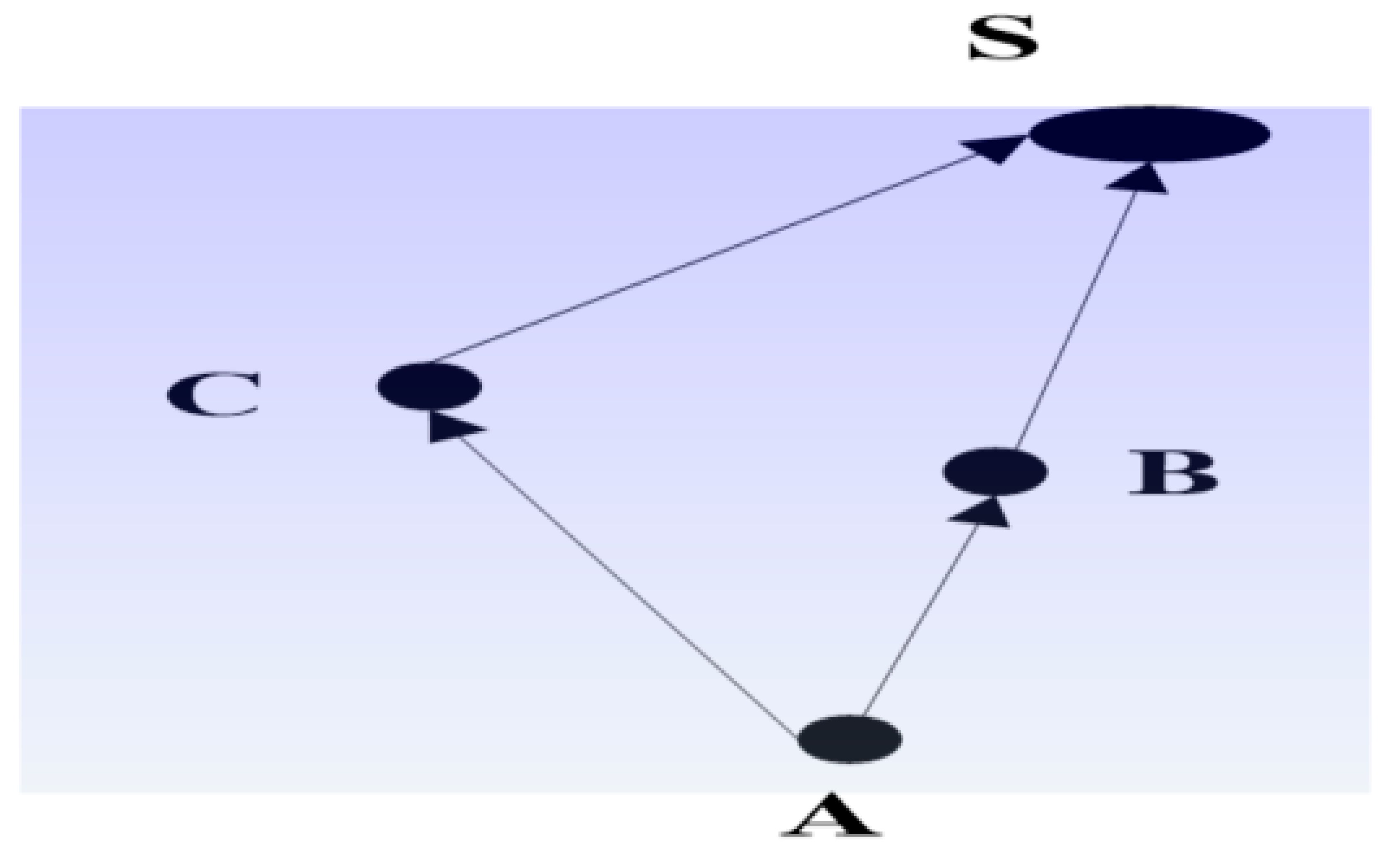
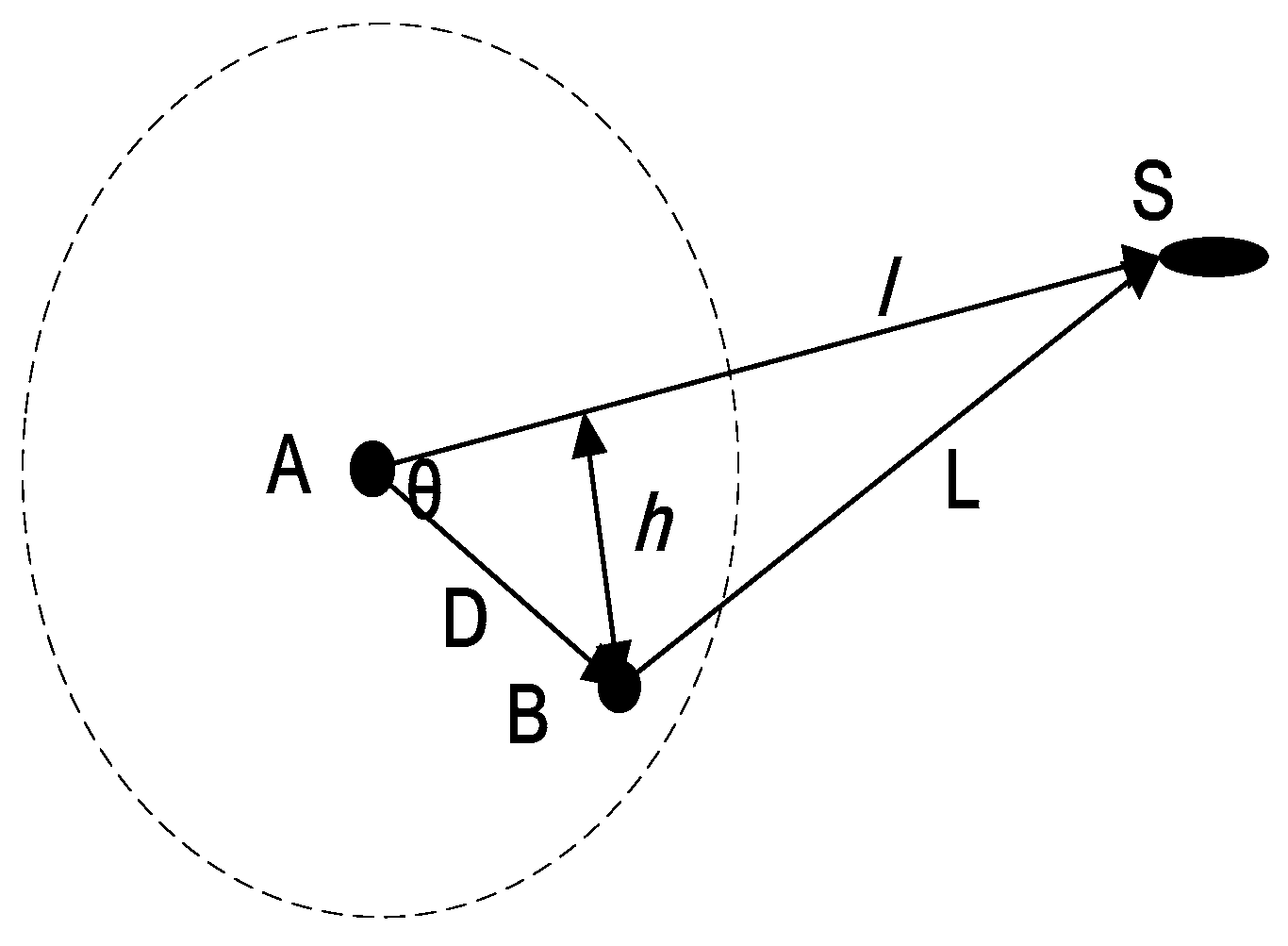
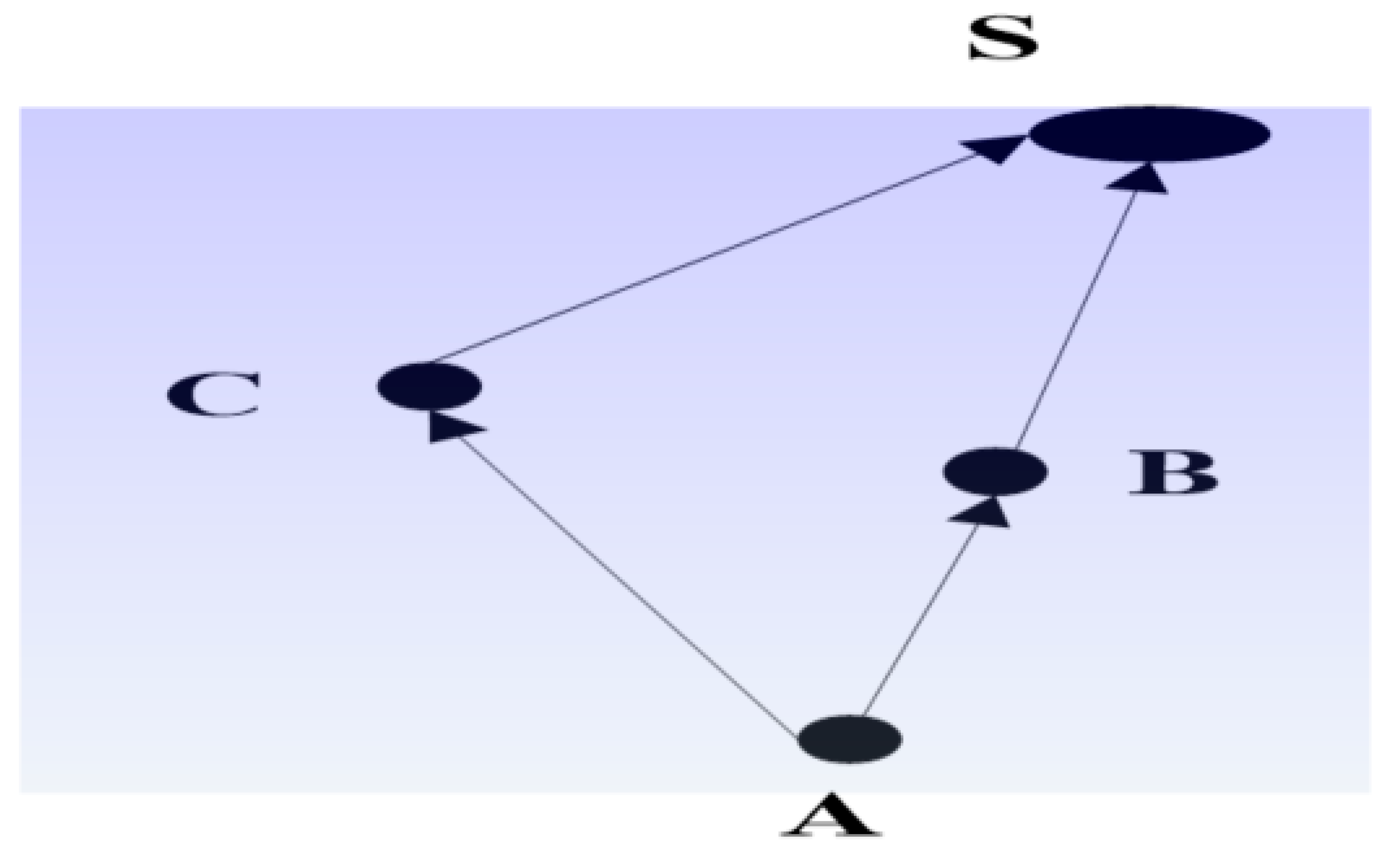
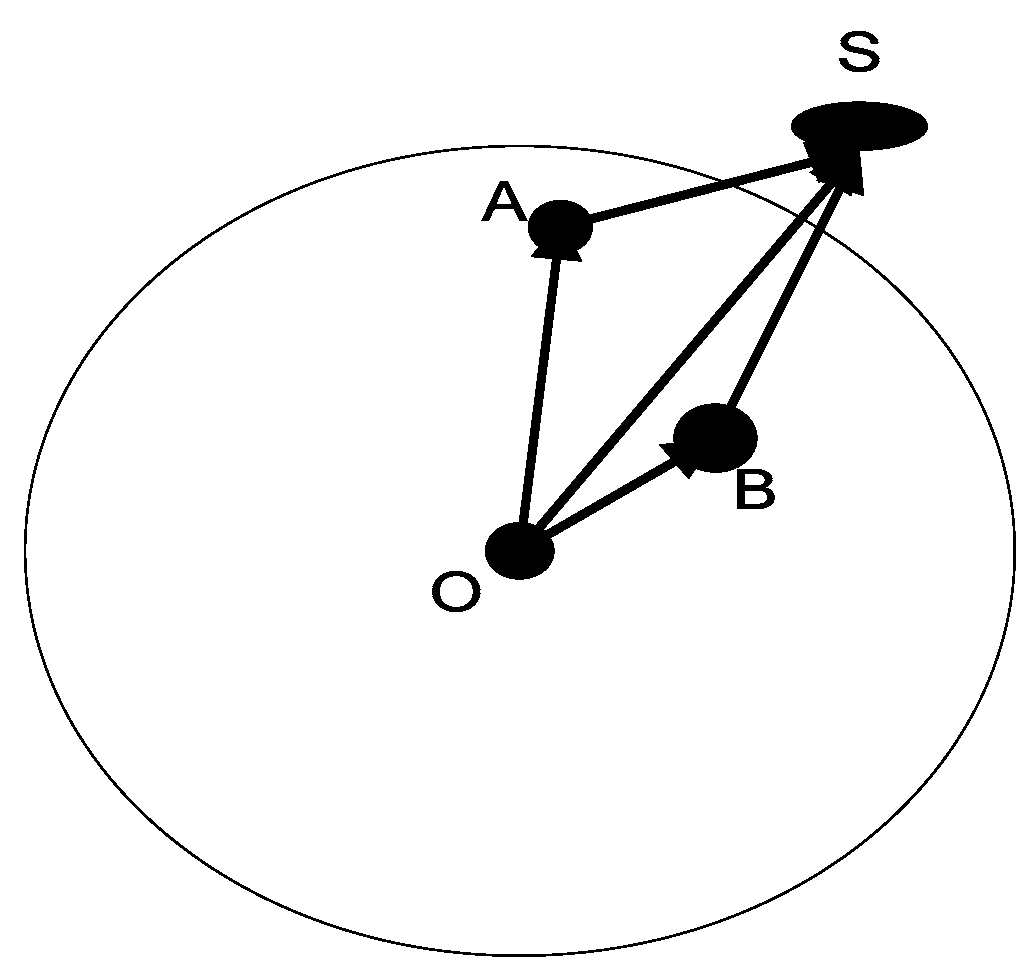
- RSS vector: The straight line from an underwater node to a sink node is called a RSS vector. It reflects the routing path with the least attenuation and noise from the node to the sink node.
3.3.1. Residual Energy
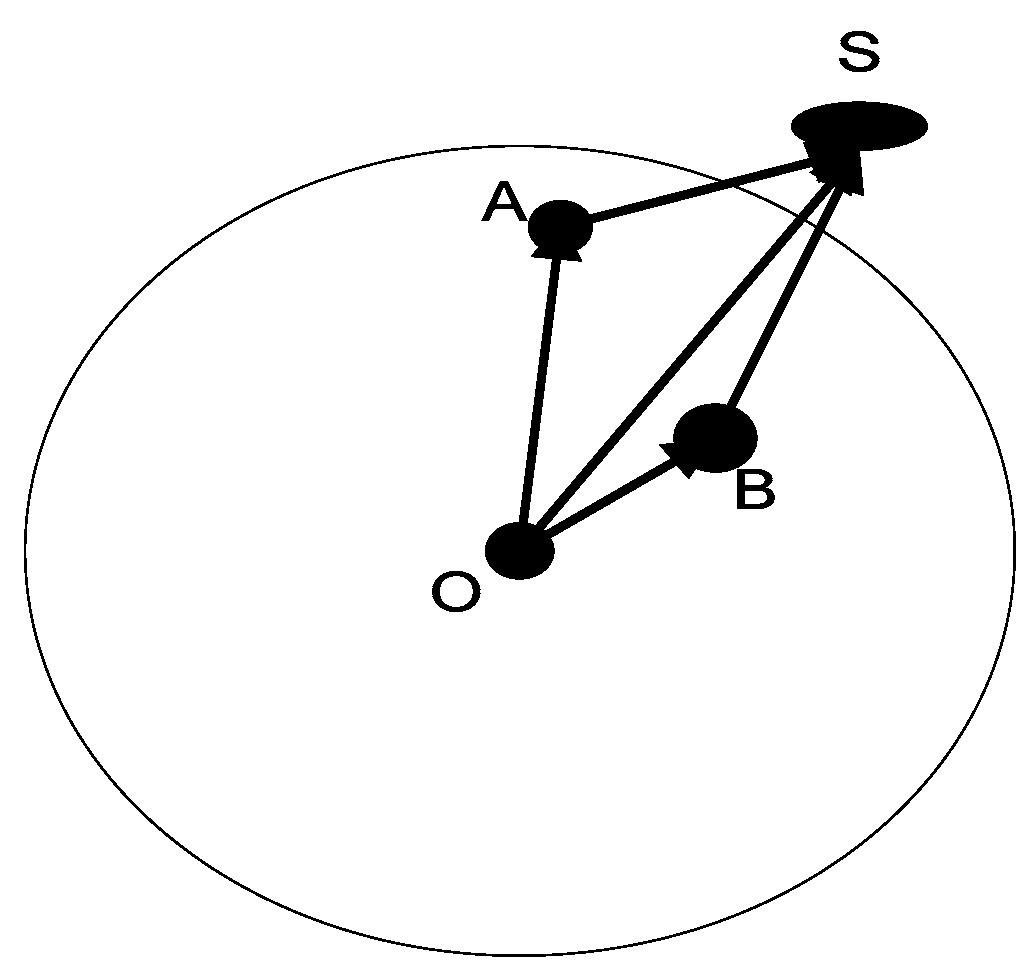
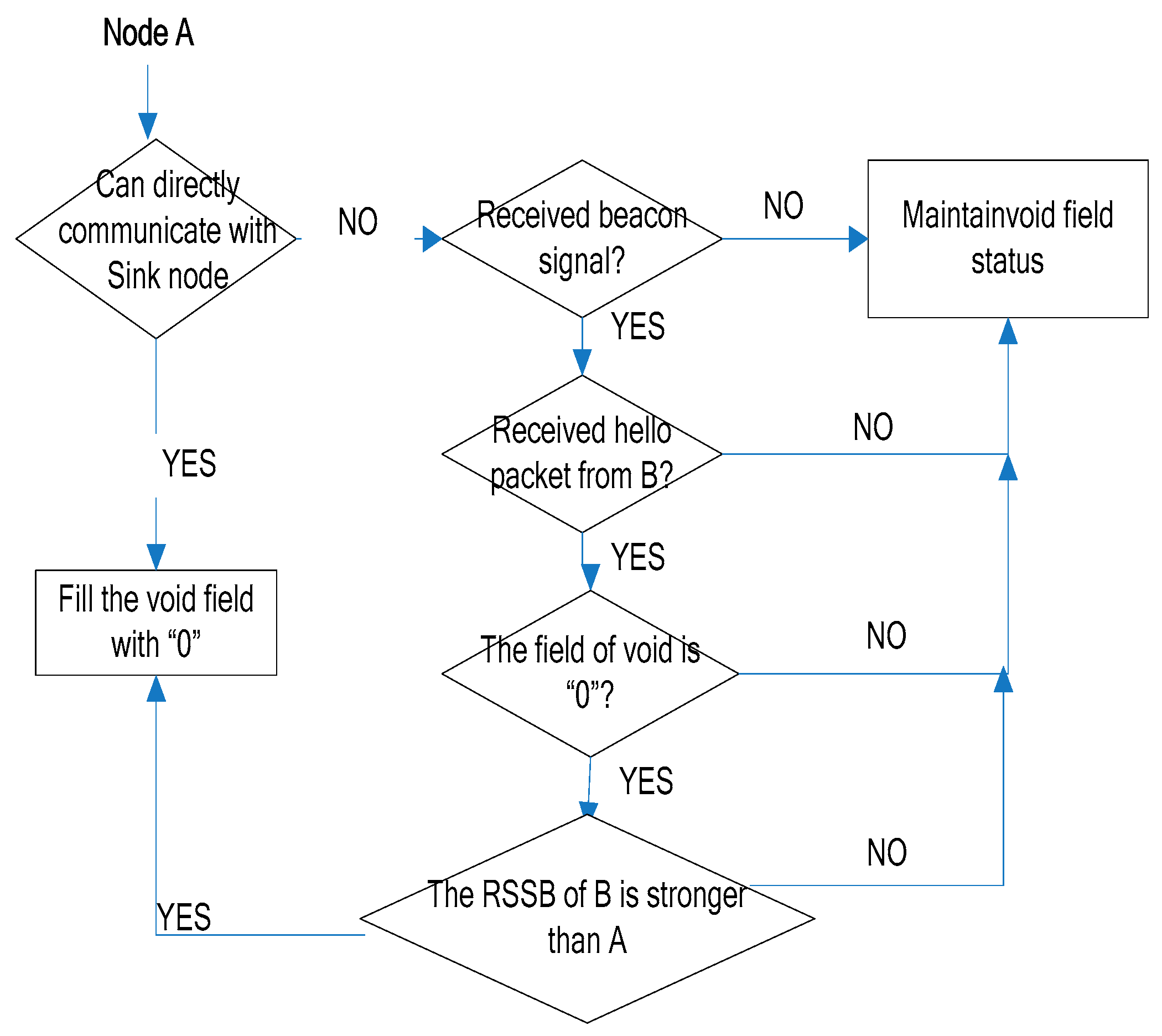
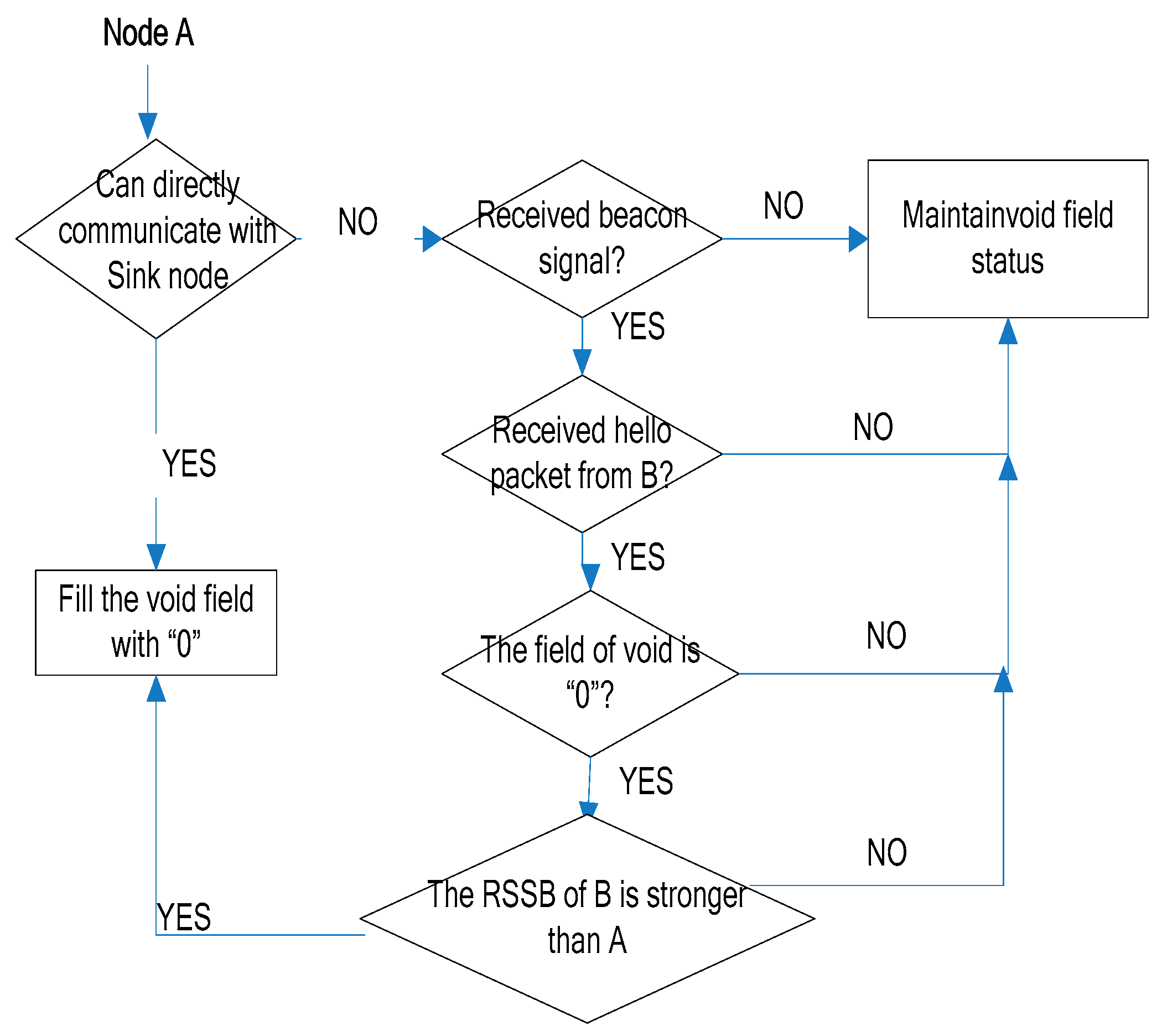
3.3.2. Void-Avoiding Algorithm
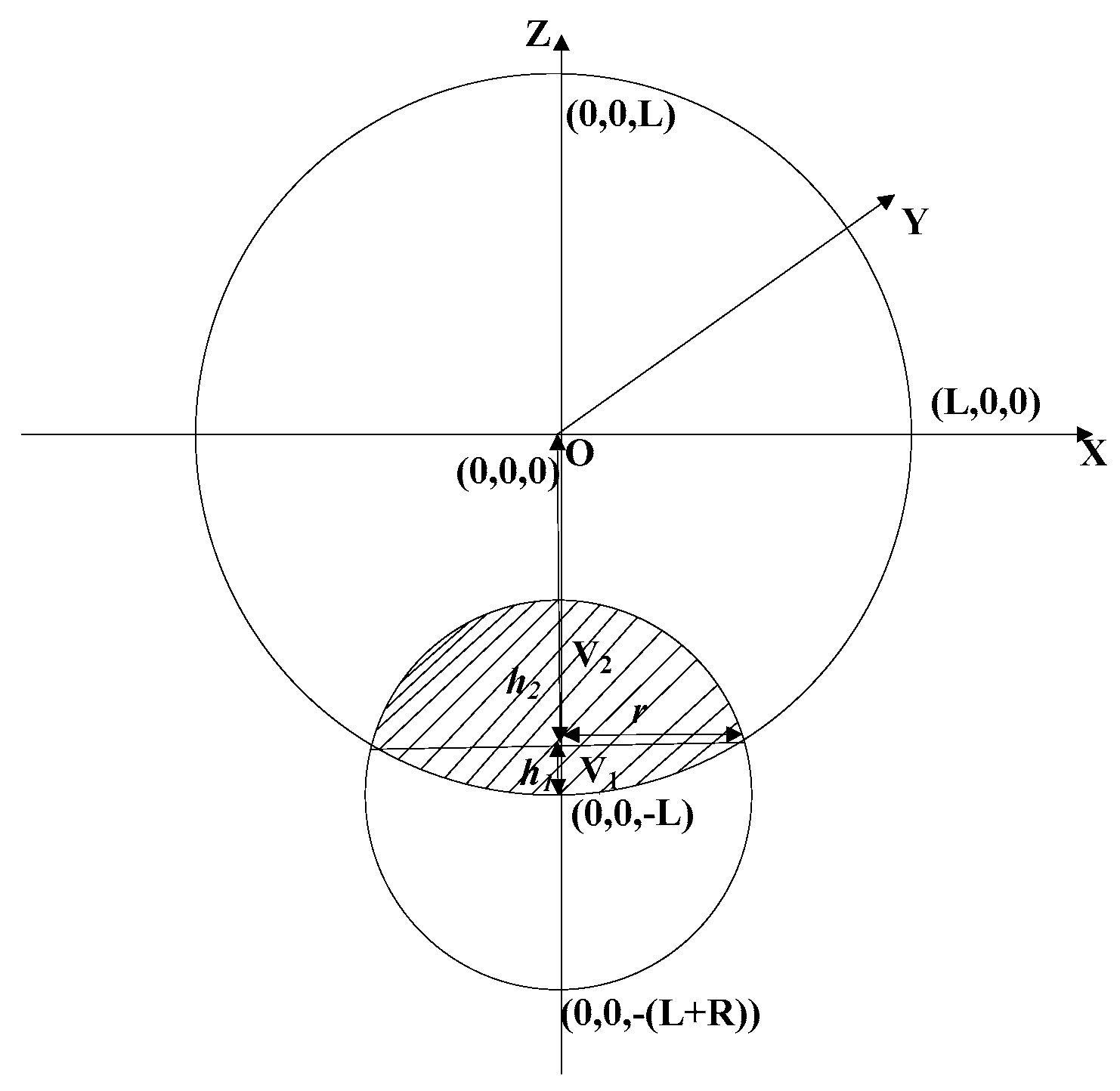
4. Mathematical Analysis
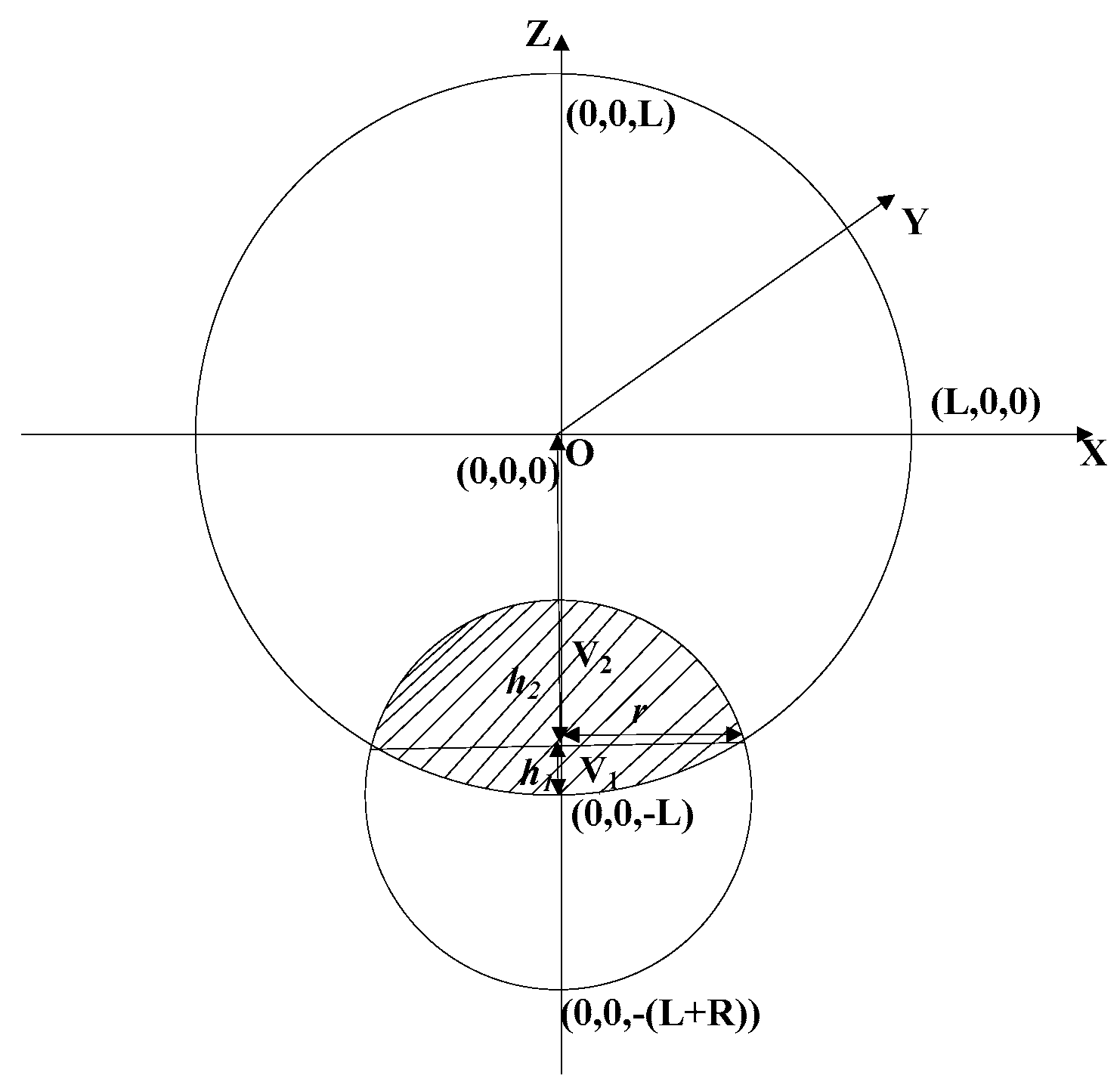
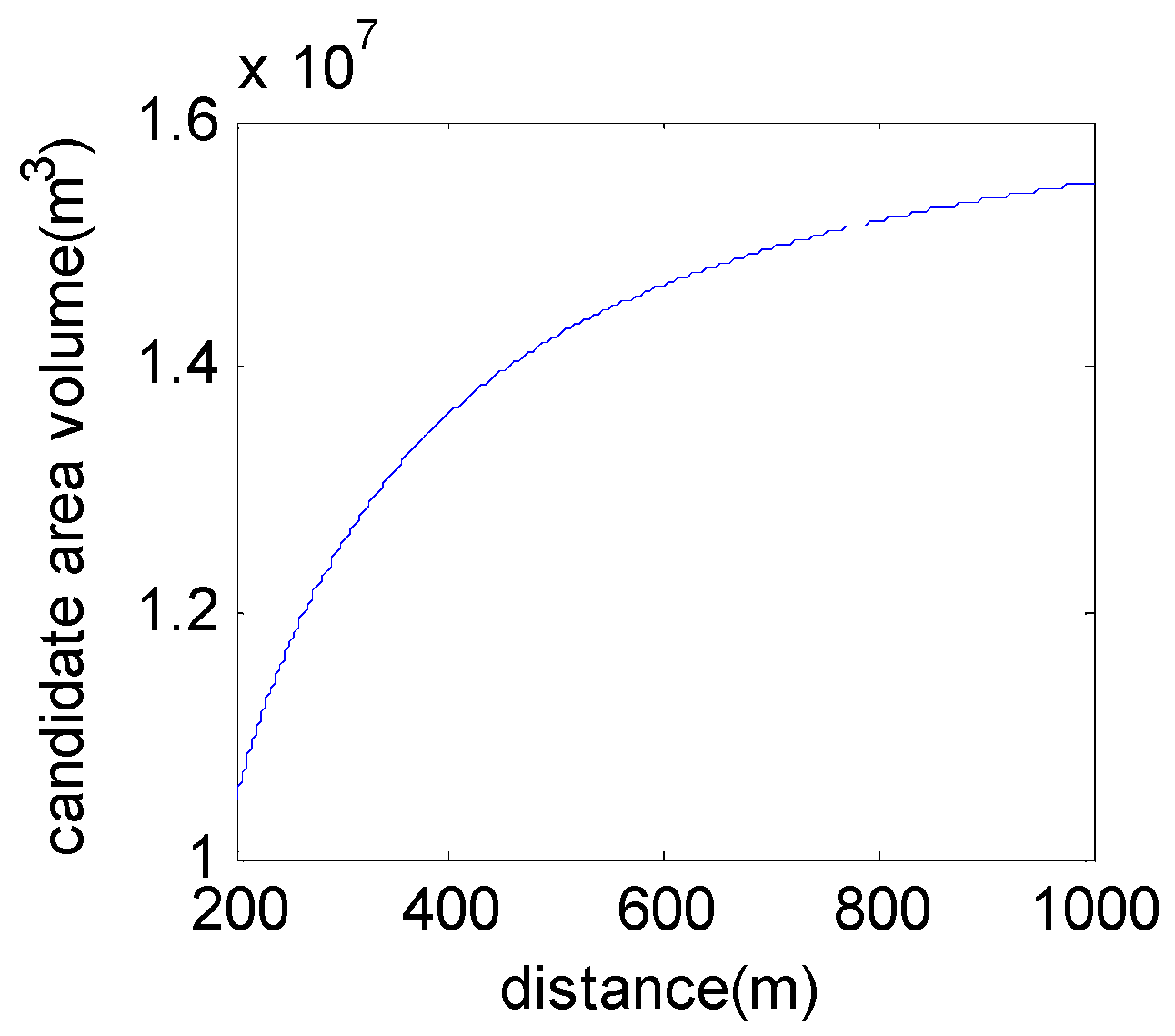
4.1. Robustness
4.2. Energy-Consumption Analysis
4.3. Priority Analysis
5. Performance Evaluation
5.1. Simulation Settings
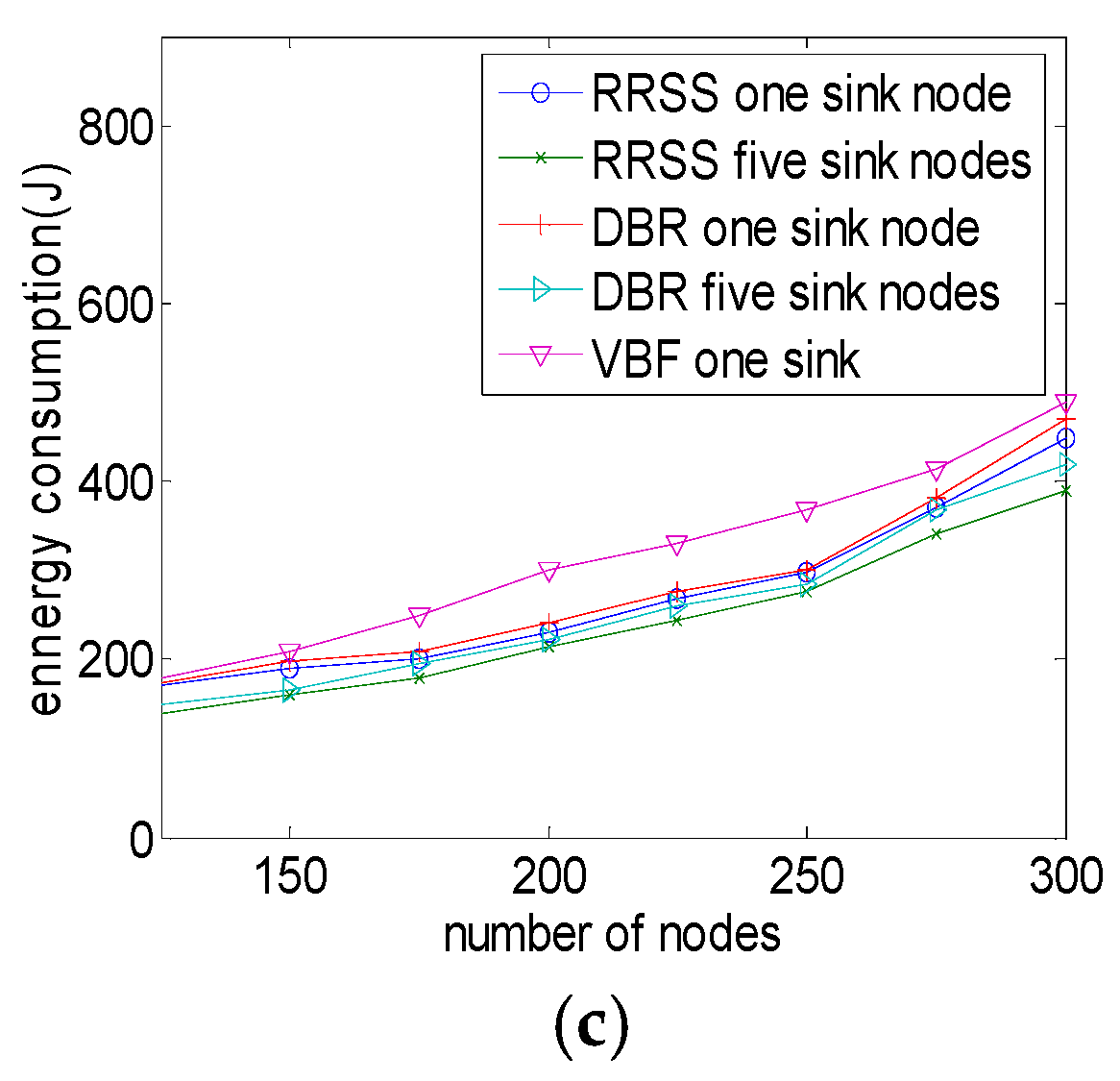
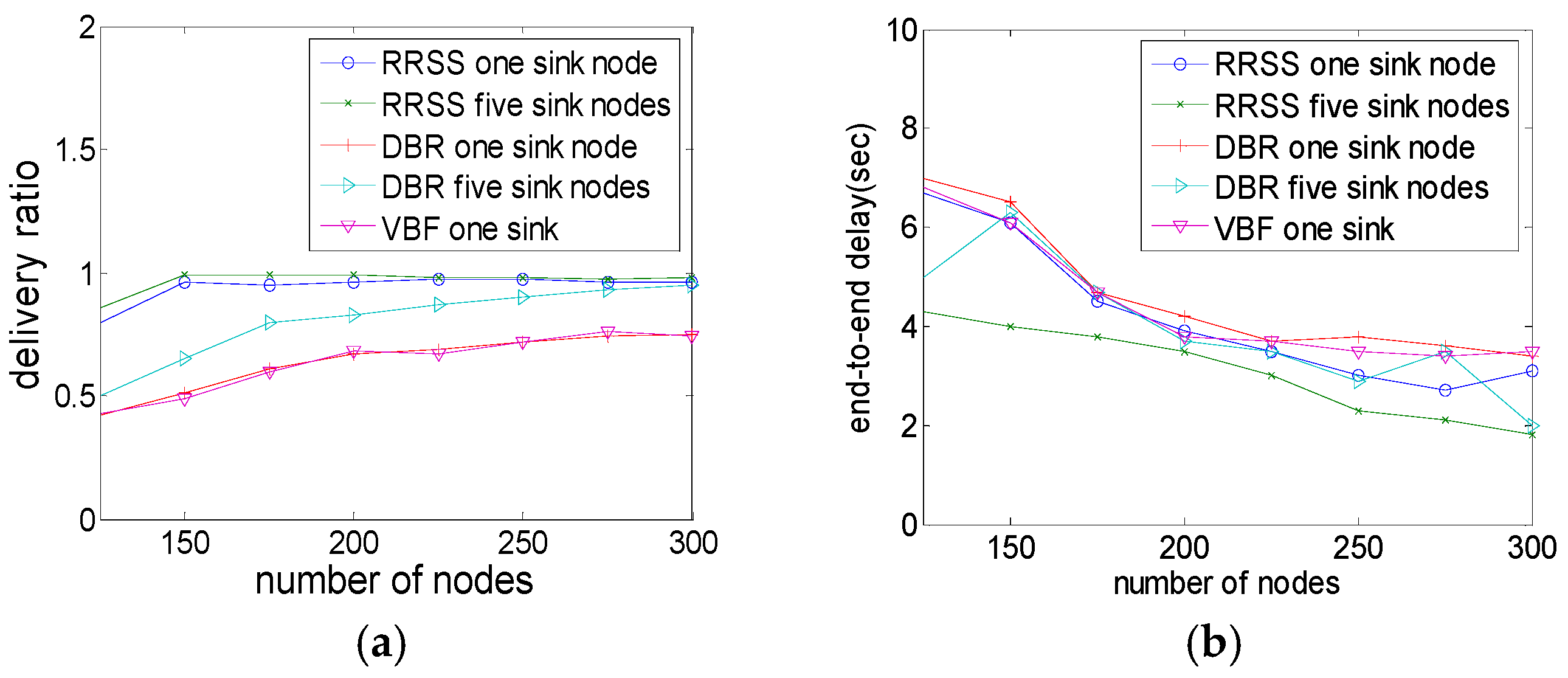
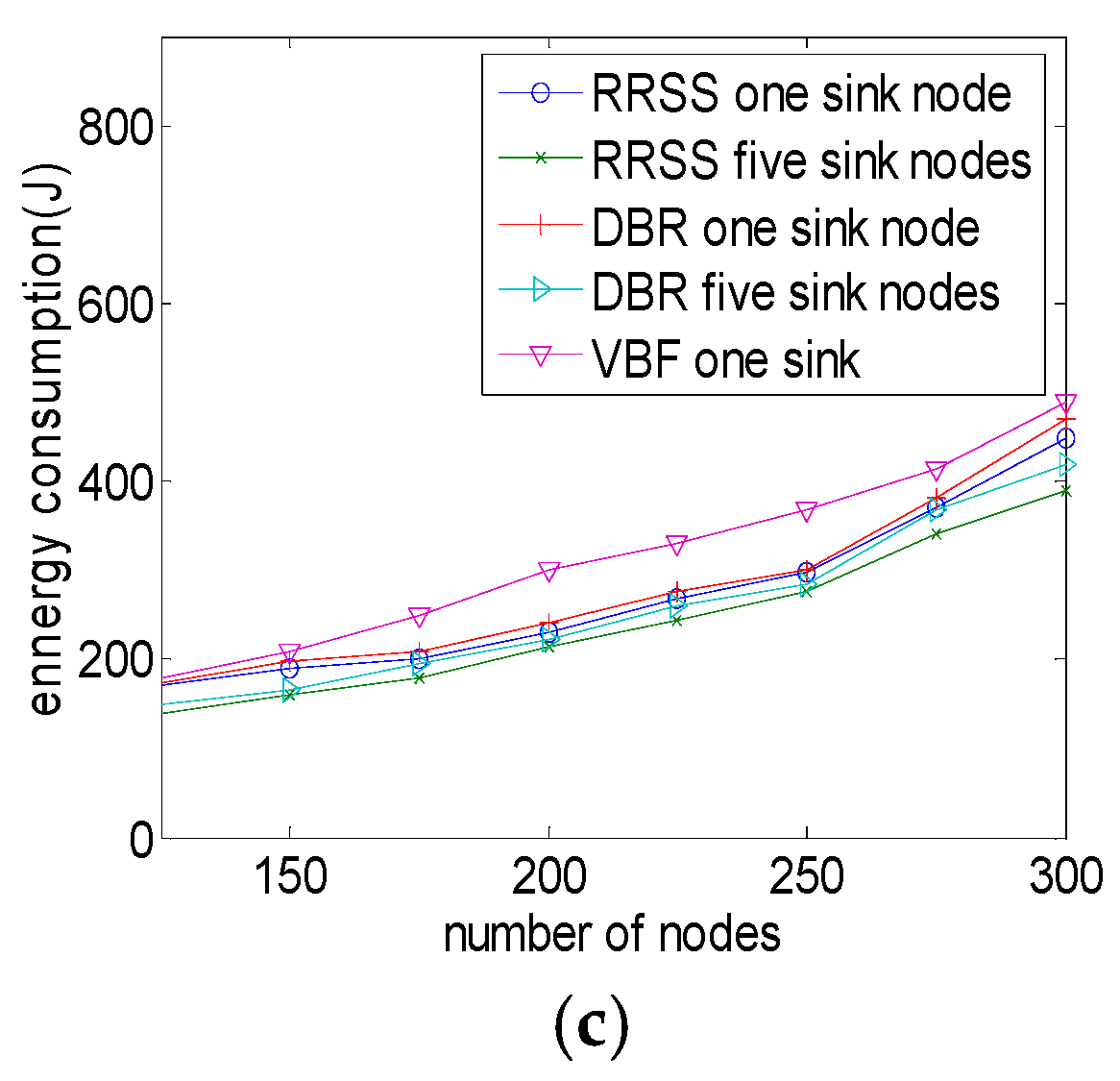
5.2. Performance Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the IEEE Wireless Communications & Networking Conference, Las Vegas, NV, USA, 3–6 April 2006; pp. 228–235. [Google Scholar]
- Mohammad, G.S.; Shahrabi, A.; Boutaleb, T. A Novel Cooperative Opportunistic Routing Scheme for Underwater Sensor Networks. Sensors 2016, 16, 297. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-Aware Pressure Routing for Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 1676–1684. [Google Scholar] [CrossRef]
- Latif, K.; Saqib, M.N.; Bouk, S.H.; Javaid, N. Energy Hole Minimization Technique for Energy Efficient Routing in Under Water Sensor Networks. In Communications in Computer & Information Science; Springer: Cham, Switzerland, 2013; Volume 414, pp. 134–148. [Google Scholar]
- Ahmed, S.; Khan, I.U.; Rasheed, M.B.; Ilahi, M.; Khan, R.D.; Bouk, S.H.; Javaid, N. Comparative Analysis of Routing Protocols for Under Water Wireless Sensor Networks. arXiv, 2013; arXiv:1306.1148. [Google Scholar]
- Xie, P.; Cui, J.H.; Lao, L. VBF: Vector-Based Forwarding Protocol for Underwater Sensor Networks. In NETWORKING 2006. Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1216–1221. [Google Scholar]
- Noh, Y.; Lee, U.; Lee, S.; Wang, P.; Vieira, L.F.; Cui, J.H.; Gerla, M.; Kim, K. HydroCast: Pressure Routing for Underwater Sensor Networks. Vehicular Technology IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Lee, U.; Wang, P.; Noh, Y.; Vieira, L.F.; Gerla, M.; Cui, J.H. Pressure Routing for Underwater Sensor Networks. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; Volume 65, pp. 1–9. [Google Scholar]
- Kiruba, S.J.G. Proficient Transmission of Depth Based Routing and Void-Aware Pressure Routing for Underwater Sensor Networks: Review. Int. J. Adv. Res. Electron. Commun. Instrum. Eng. 2014, 2, 12–18. [Google Scholar]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-Based Routing for Underwater Sensor Networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer: Cham, Switzerland, 2008; Volume 4982, pp. 72–86. [Google Scholar]
- Wahid, A.; Lee, S.; Jeong, H.J.; Kim, D. Eedbr: Energy-Efficient Depth-Based Routing Protocol for Underwater Wireless Sensor Networks. In Advanced Computer Science and Information Technology; Springer: Berlin/Heidelberg, Germany, 2011; pp. 223–234. [Google Scholar]
- Coutinho, R.W.; Vieira, L.F.; Loureiro, A.A. DCR: Depth-Controlled Routing protocol for underwater sensor networks. In Proceedings of the Symposium on Computers and Communications, Split, Croatia, 7–10 July 2013. [Google Scholar]
- Ali, T.; Jung, L.T.; Faye, I. End-to-End Delay and Energy Efficient Routing Protocol for Underwater Wireless Sensor Networks. Wirel. Pers. Commun. 2014, 79, 339–361. [Google Scholar] [CrossRef]
- Uddin, M.A. Link Expiration Time-Aware Routing Protocol for UWSNs. J. Sens. 2013, 2013, 625274. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A Channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2014, 34, 92–104. [Google Scholar] [CrossRef]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An Energy Efficient Routing Protocol for UWSNs in the Internet of Underwater Things. IEEE Sens. J. 2015, 16, 4072–4082. [Google Scholar] [CrossRef]
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the Oceans, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Du, X.J.; Huang, K.J.; Lan, S.L.; Feng, Z.X.; Liu, F. LB-AGR: Level-based adaptive geo-routing for underwater sensor networks. J. China Univ. Posts Telecommun. 2014, 21, 54–59. [Google Scholar] [CrossRef]
- Jafri, M.R.; Ahmed, S.; Javaid, N.; Ahmad, Z.; Qureshi, R.J. AMCTD: Adaptive mobility of courier nodes in threshold-optimized DBR protocol for underwater wireless sensor networks. In Proceedings of the 8th IEEE International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA’13), Compiegne, France, 28–90 October 2013. [Google Scholar]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. Iamctd: Improved Adaptive Mobility of Courier Nodes in Threshold-Optimized DBR Protocol for Underwater Wireless Sensor Networks. In Proceedings of the Eighth International Conference on Broadband and Wireless Computing, Communication and Applications, Tokyo, Japan, 28–30 October 2013; pp. 259–273. [Google Scholar]
- Yang, W.; Kim, D.S. Reliable and energy-efficient routing protocol for underwater acoustic sensor networks. In Proceedings of the International Conference on Information and Communication Technology Convergence, Busan, Korea, 22–24 October 2014; pp. 738–743. [Google Scholar]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOB Mob. Comput. Commun. Rev. 2006, 11, 41–47. [Google Scholar]
- Thorp, W.H. Analytic Description of the Low-Frequency Attenuation Coefficient. J. Acoust. Soc. Am. 1967, 42, 270. [Google Scholar] [CrossRef]
- Fitzgerald, R.J. The many paths to underwater acoustic communication. Phys. Today 2015, 68, 20. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Communication radius | 100 m |
| Data packet payload size | 50 byte |
| Hello packet size | 6 byte |
| Transmission power | 2 w |
| Receive power | 0 w |
| Idle power | 0 w |
| Bit rate | 10 kbps |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Du, X.; Huang, K.; Hou, S.; Liu, X. A Routing Protocol Based on Received Signal Strength for Underwater Wireless Sensor Networks (UWSNs). Information 2017, 8, 153. https://doi.org/10.3390/info8040153
Li M, Du X, Huang K, Hou S, Liu X. A Routing Protocol Based on Received Signal Strength for Underwater Wireless Sensor Networks (UWSNs). Information. 2017; 8(4):153. https://doi.org/10.3390/info8040153
Chicago/Turabian StyleLi, Meiju, Xiujuan Du, Kejun Huang, Senlin Hou, and Xiuxiu Liu. 2017. "A Routing Protocol Based on Received Signal Strength for Underwater Wireless Sensor Networks (UWSNs)" Information 8, no. 4: 153. https://doi.org/10.3390/info8040153
APA StyleLi, M., Du, X., Huang, K., Hou, S., & Liu, X. (2017). A Routing Protocol Based on Received Signal Strength for Underwater Wireless Sensor Networks (UWSNs). Information, 8(4), 153. https://doi.org/10.3390/info8040153