Deployment and Field Evaluation of In-Vehicle Traffic Signal Advisory System (ITSAS)

 ,
, 
 ,
,
Abstract
:1. Introduction
2. Literature Review
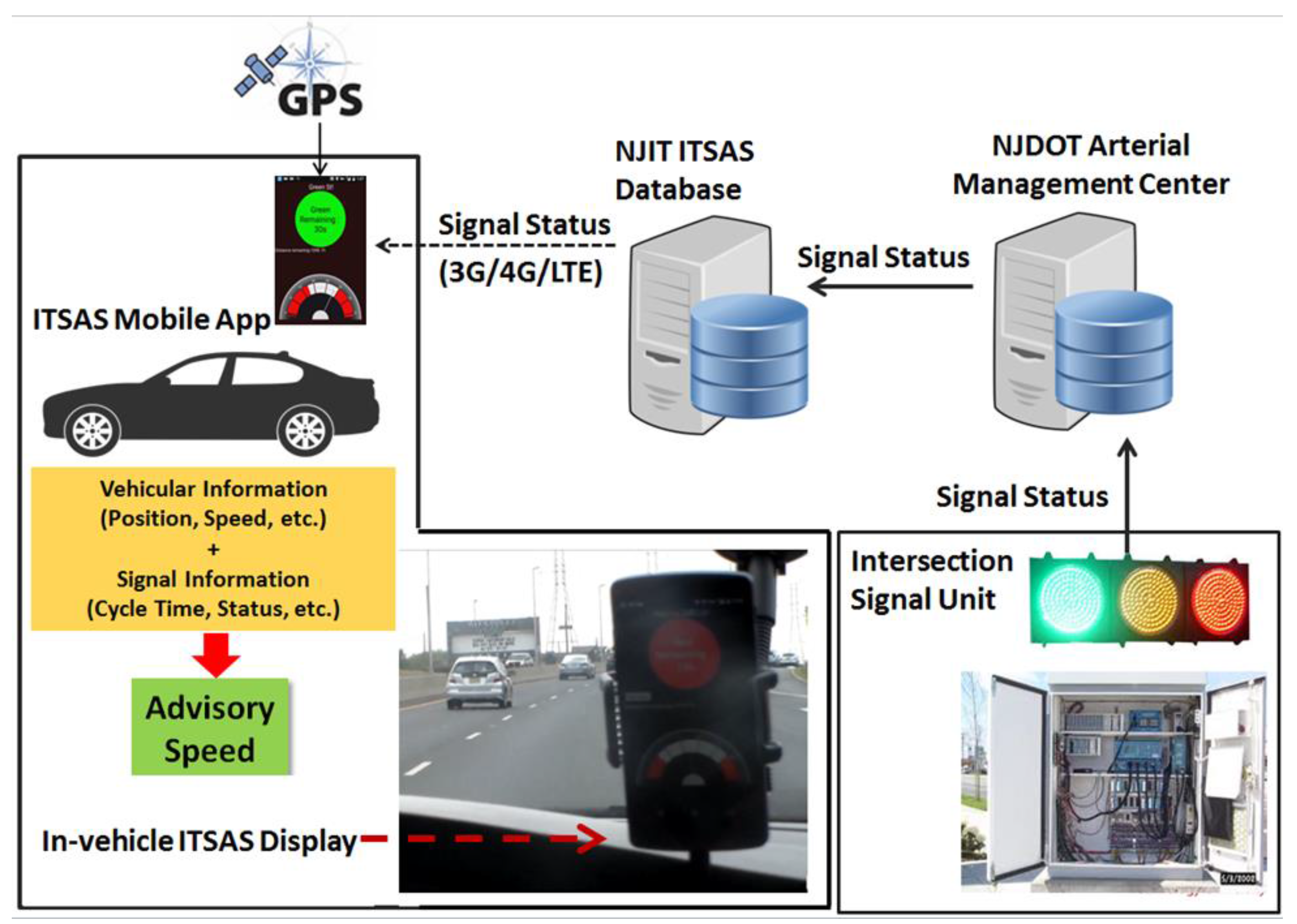
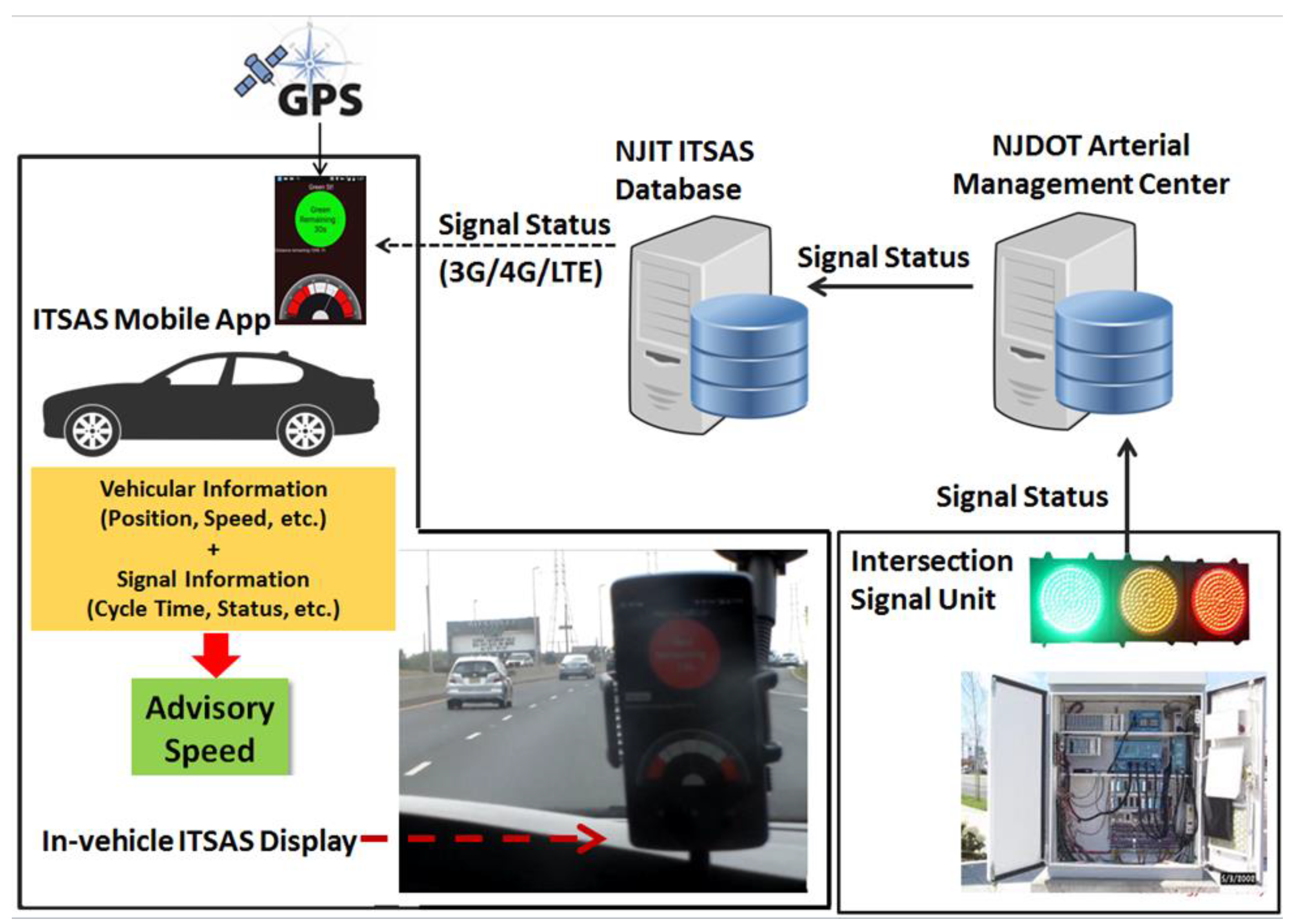
3. ITSAS Overall System Architecture
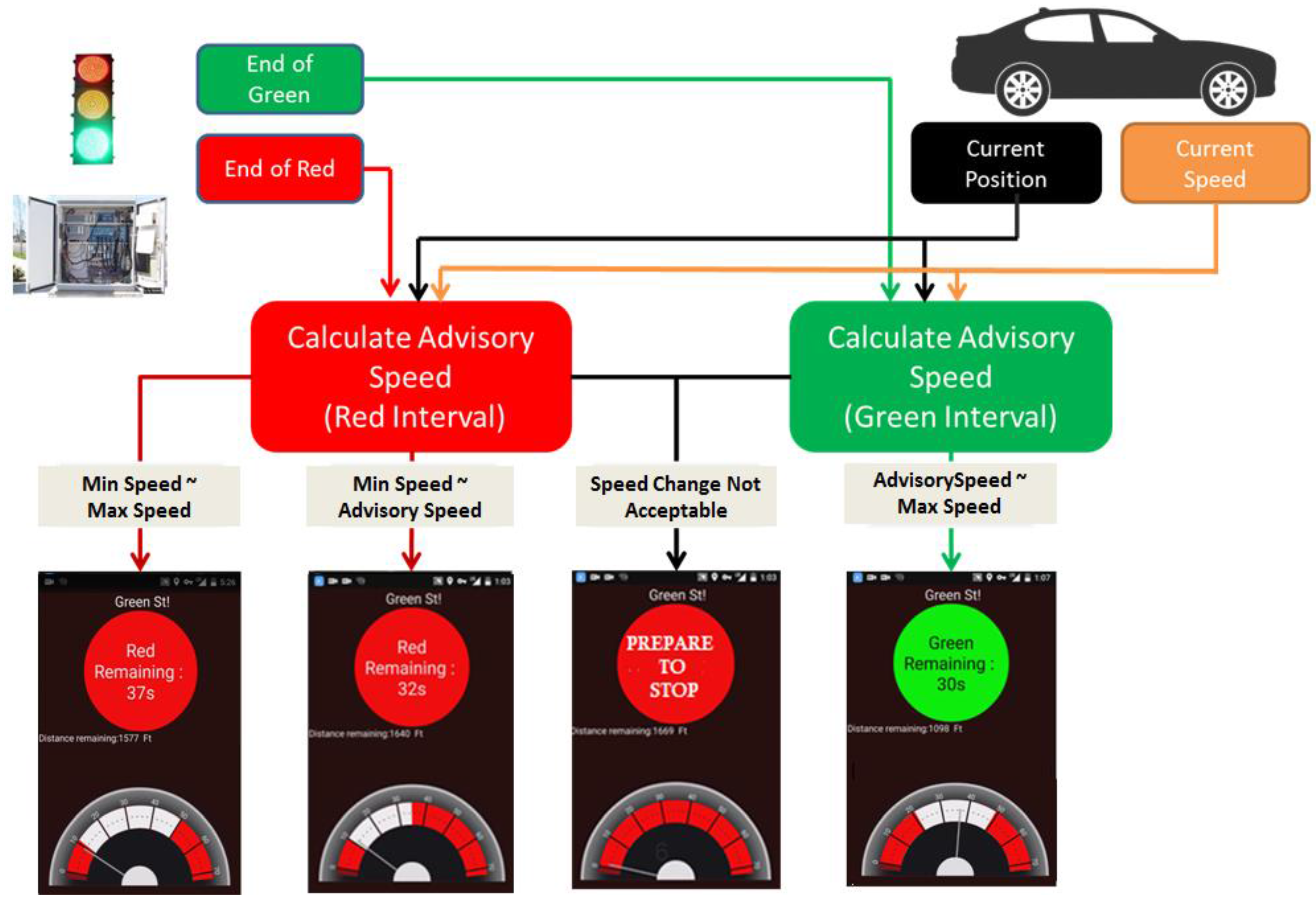
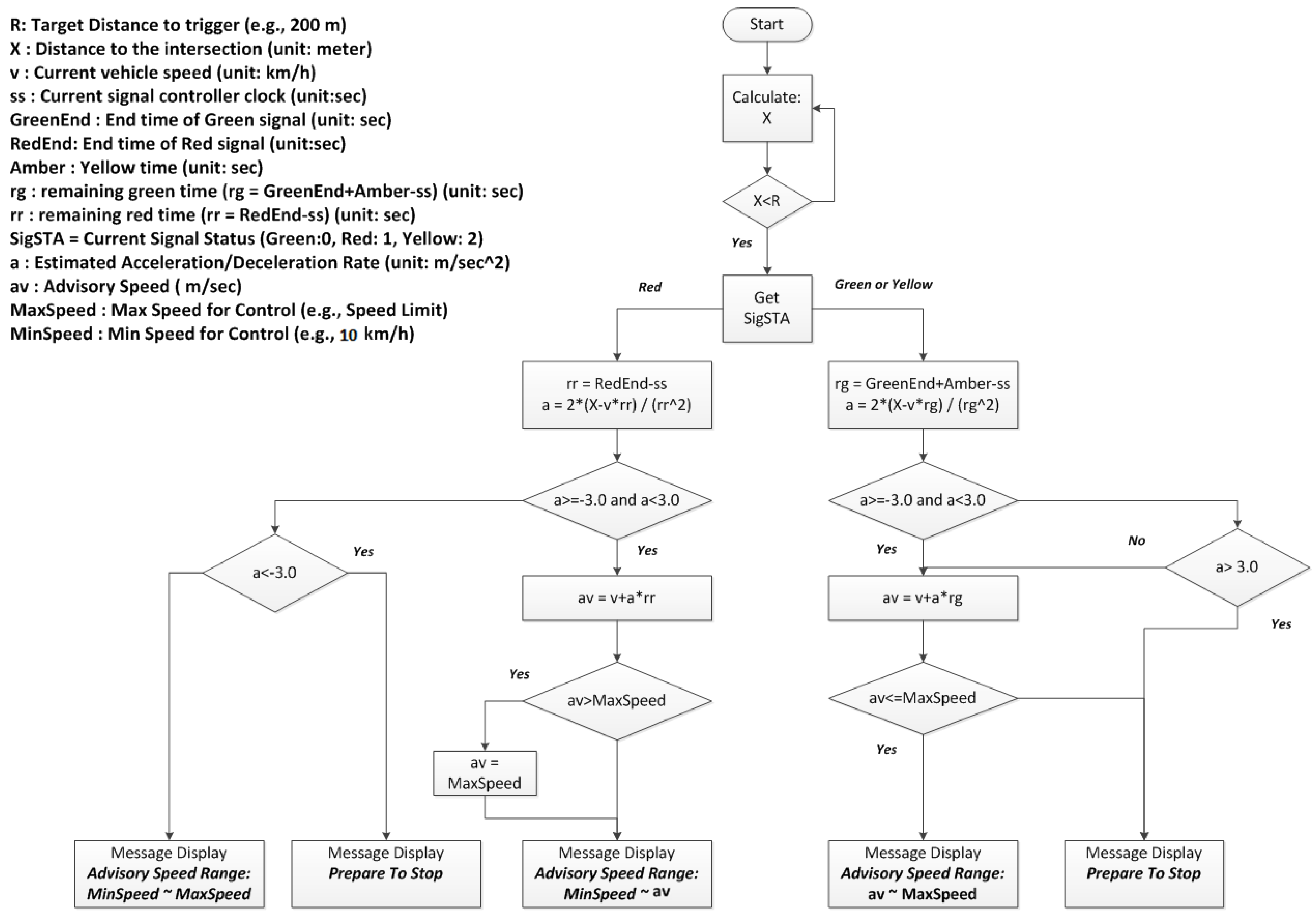
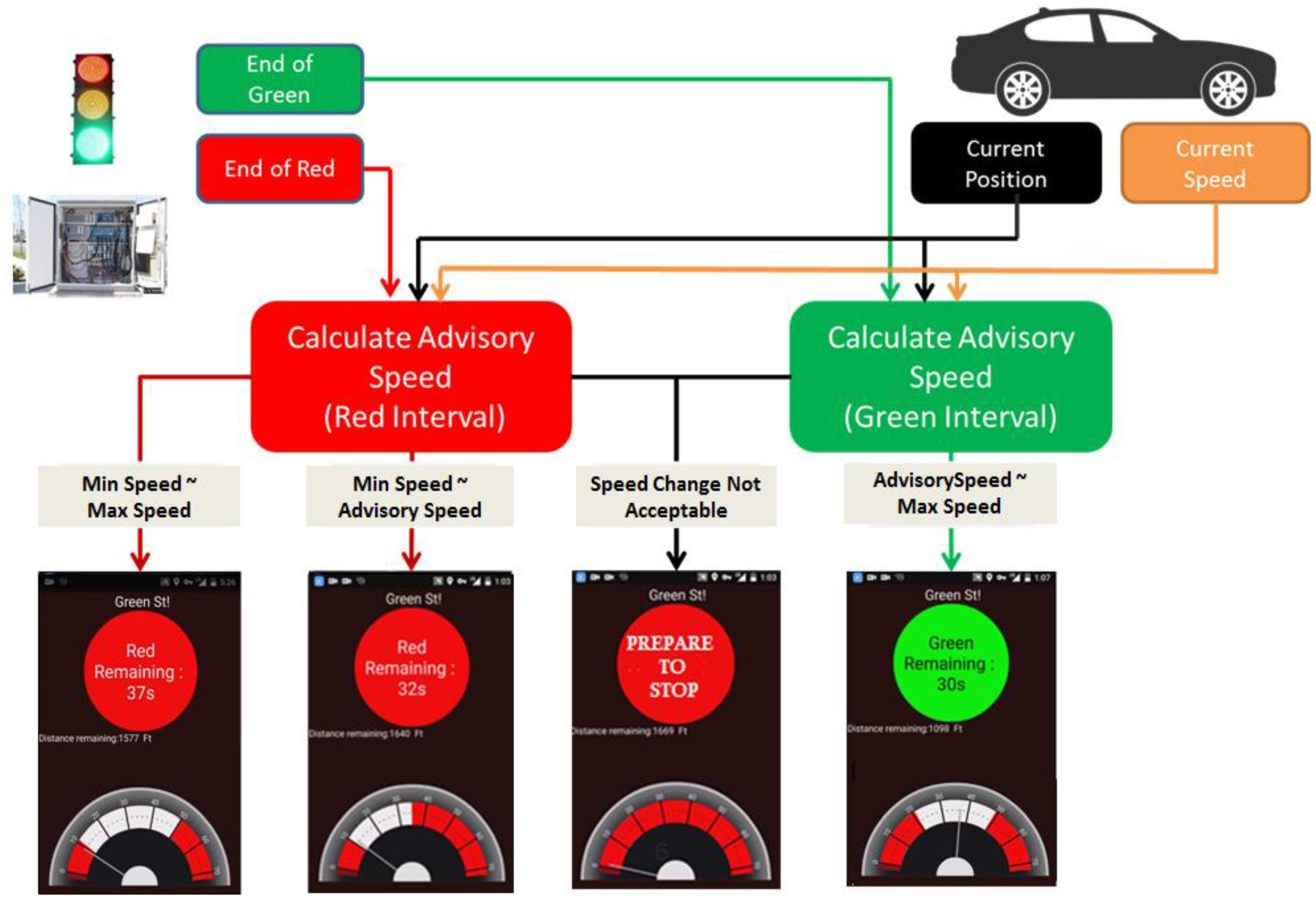
4. Advisory Speed Algorithm
- ss: Current signal controller clock (unit: s)
- GreenEnd: End time of Green signal (unit: s)
- RedEnd: End time of Red signal (unit: s)
- Amber: Yellow time interval (unit: s)
- rg: remaining green time (unit: s)
- rr: remaining red time (unit: s)
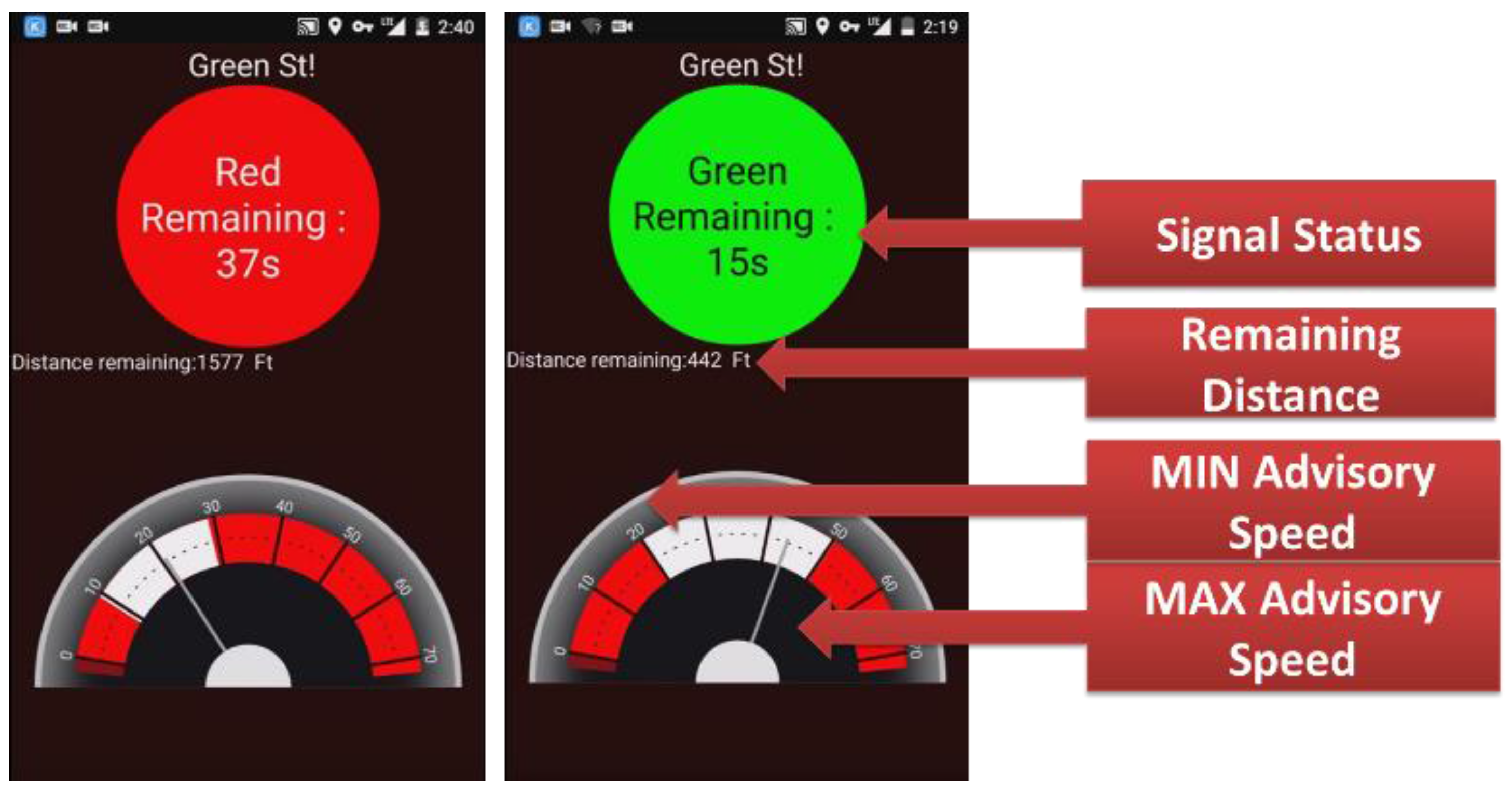
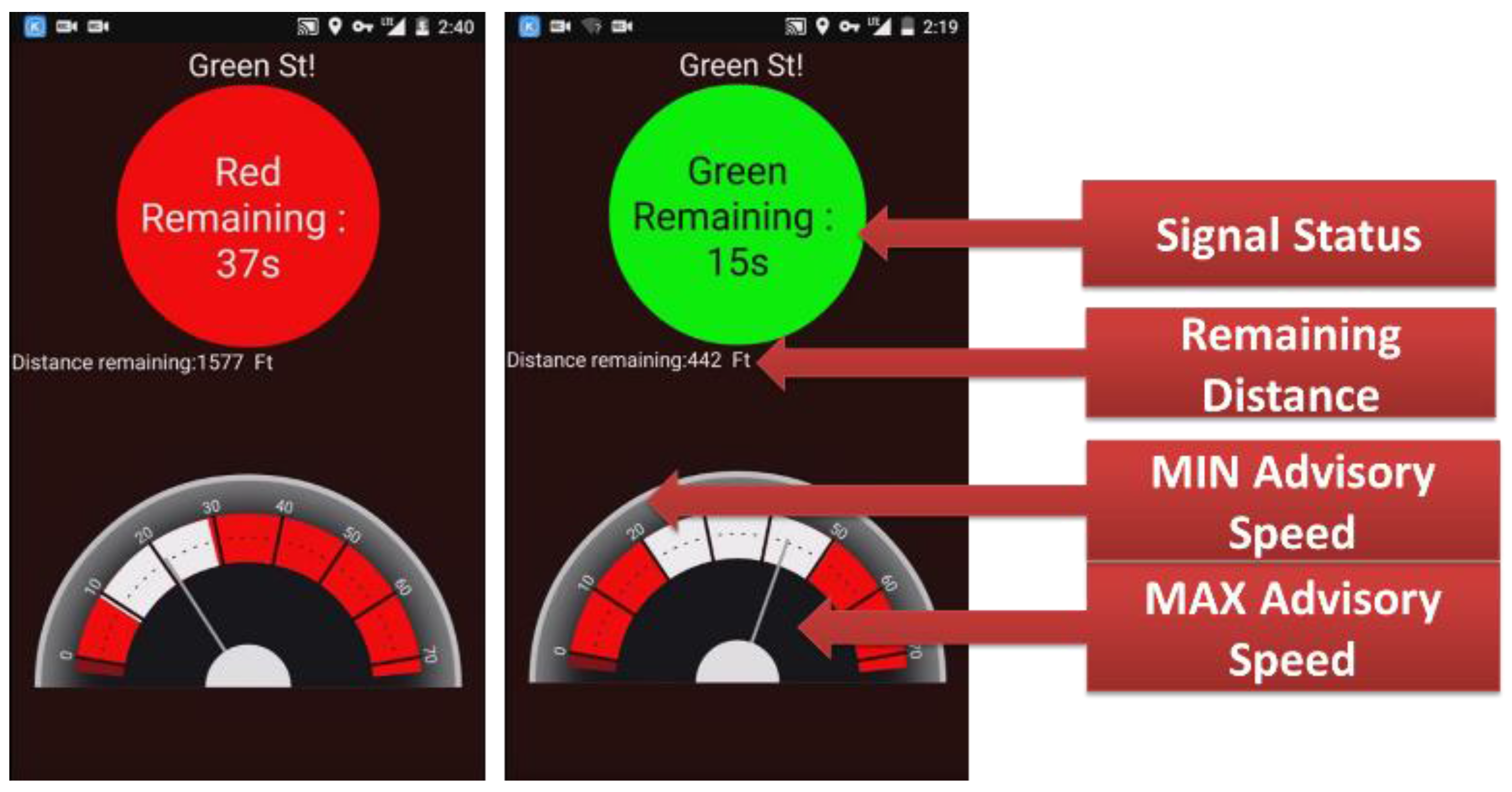
5. ITSAS Mobile Application
6. Field Evaluations
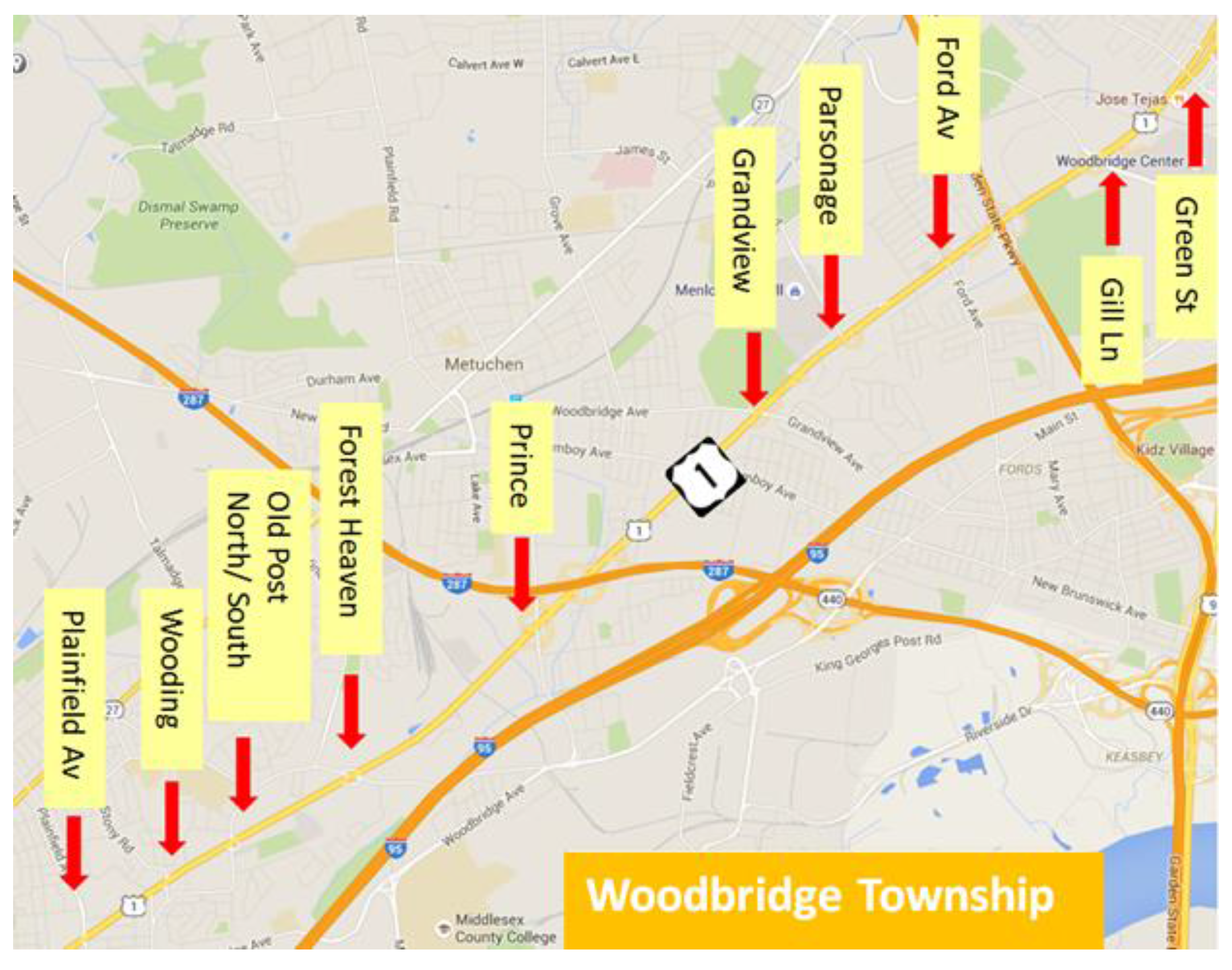
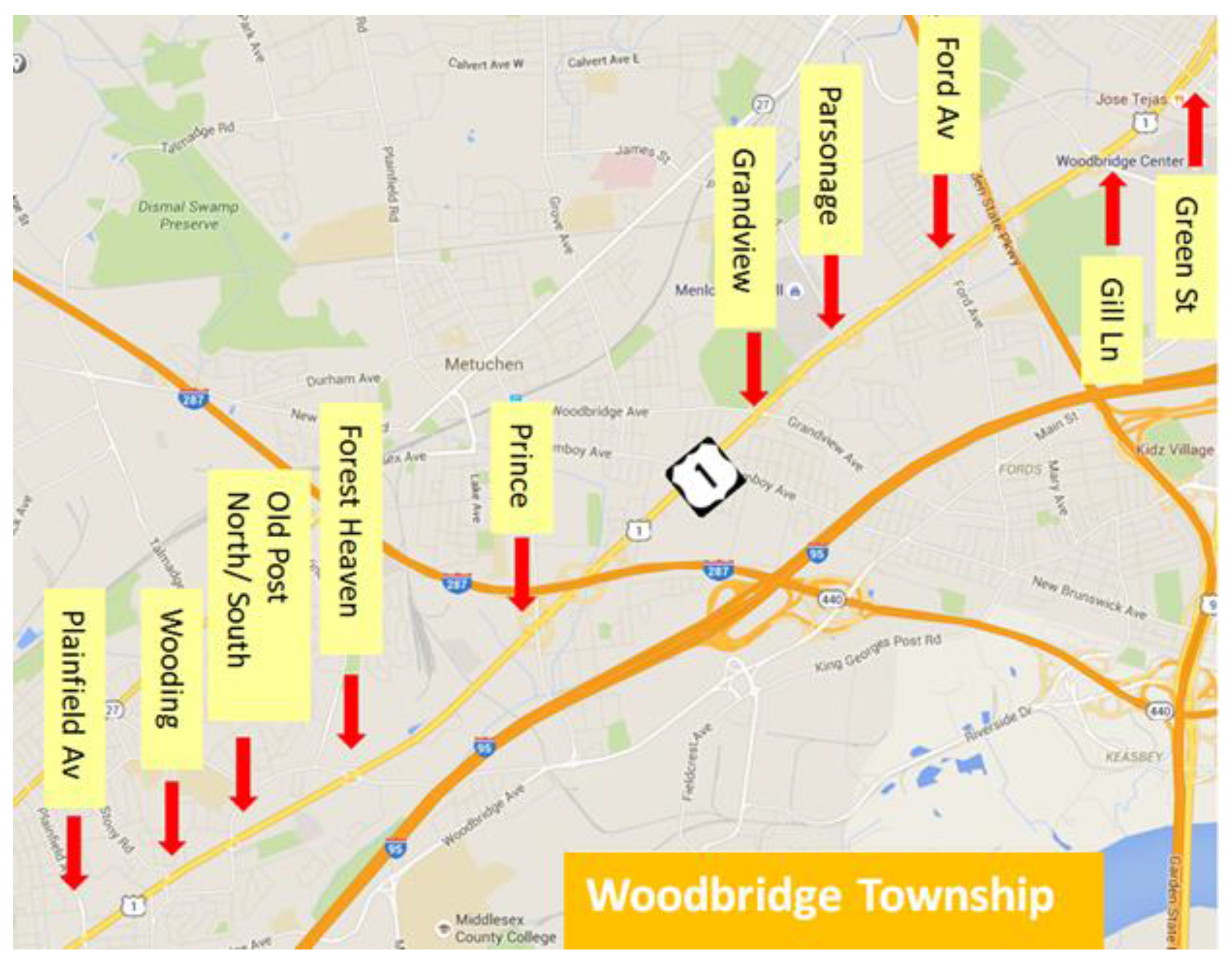
6.1. Field Evaluation Site
6.2. Data Collection
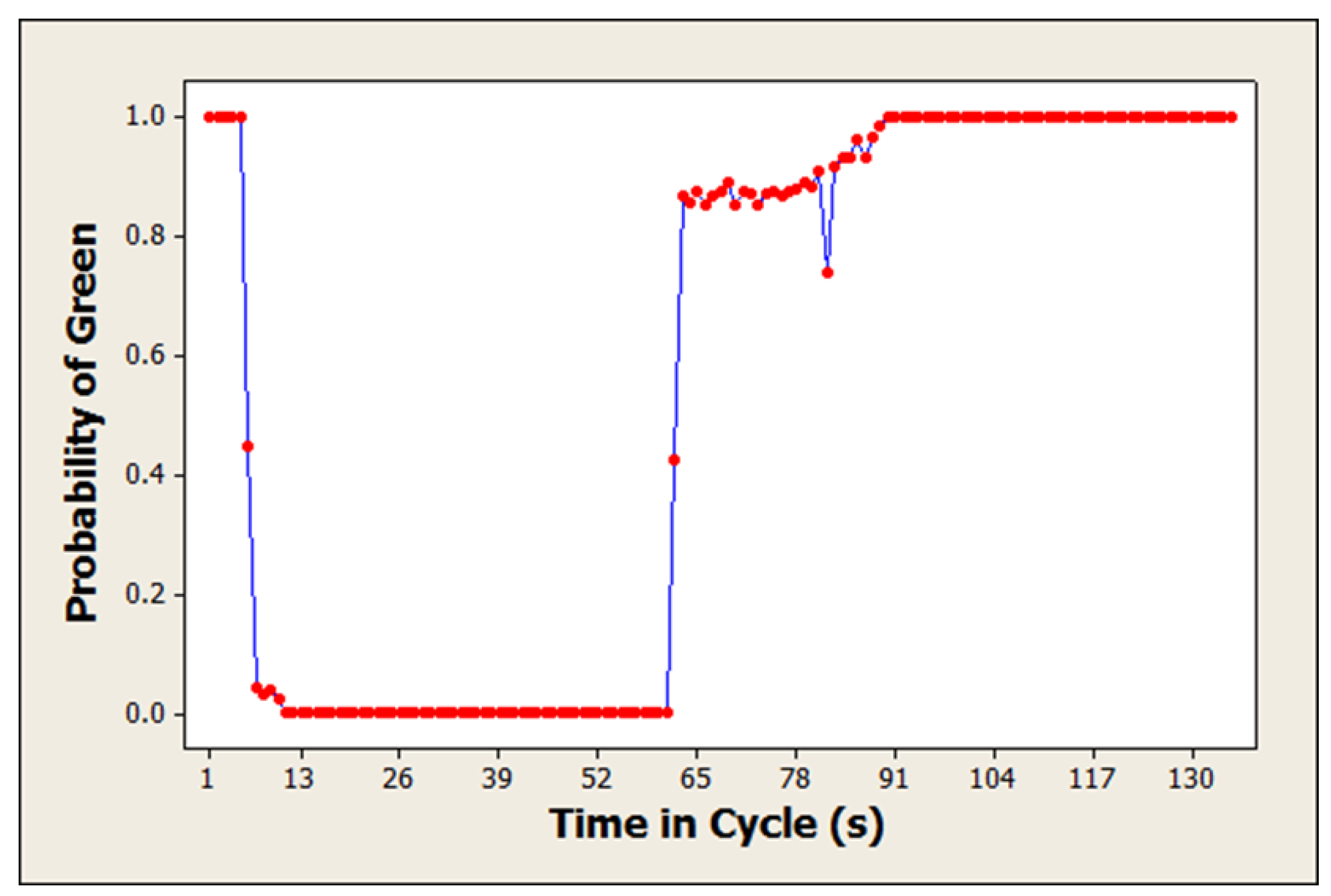
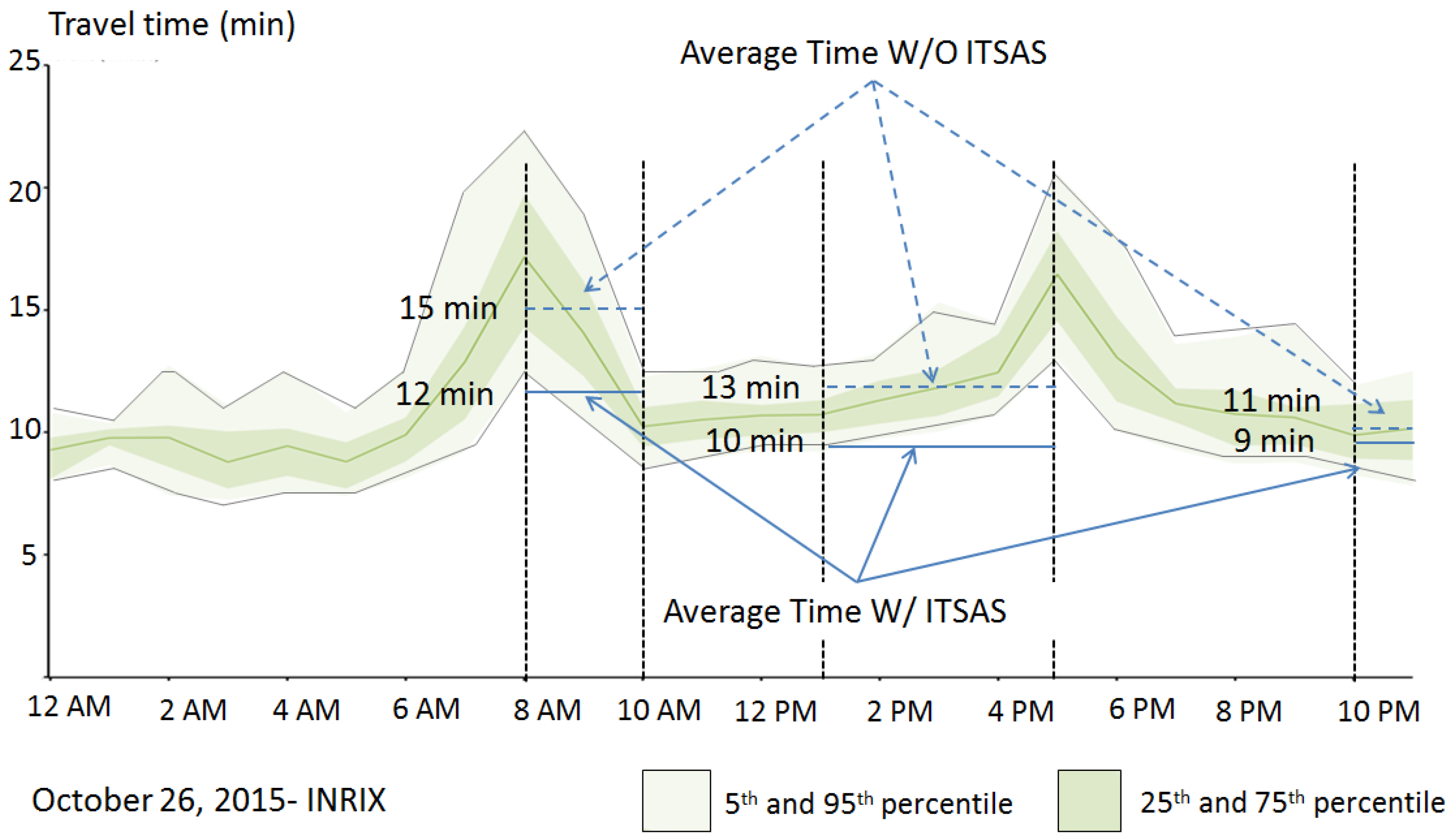
6.3. Field Evaluation Results and Discussion
7. Conclusions
8. Future Research
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carter, A.; Chang, J. Using Dedicated Short Range Communications for Vehicle Safety Applications—The Next Generation of Collision Avoidance. In Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles (ESV), Stuttgart, Germany, 15–18 June 2009. [Google Scholar]
- Jurgen, R.K. V2V/V2I Communications for Improved Road Safety and Efficiency; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Vasudevan, M.; Wunderlich, K. Analysis, Modeling, and Simulation (AMS) Testbed Preliminary Evaluation Plan for Dynamic Mobility Applications (DMA) Program; FHWA-JPO-13-097; U.S. Department of Transportation: Washington, DC, USA, 2013.
- Pindilli, E. Applications for the Environment: Real-Time Information Synthesis (AERIS)—Benefit-Cost Analysis; Federal Highway Administration Office, U.S. Department of Transportation: Washington, DC, USA, 2012.
- McDonnell, B. Gov. McDonnell Launches I-66 Connected Vehicle Test Bed. Available online: http://www.virginiadot.org/newsroom/northern_virginia/2013/gov._mcdonnell_launches_i-6666048.asp (accessed on 26 June 2016).
- Shladover, S.E.; Nowakowski, C.; Lu, X.Y.; Ferlis, R. Cooperative adaptive cruise control (CACC) definitions and operating concepts. In Proceedings of the 94th Annual TRB Meeting, Transportation Research Board, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Hedges, C.; Perry, F. Overview and Use of SAE J2735 Message Sets for Commercial Vehicles; No. 2008-01-2650; SAE Technical Paper: Warrendale, PA, USA, 2008. [Google Scholar]
- Misener, J.A. Cooperative Intersection Collision Avoidance System (CICAS): Signalized Left Turn Assist and Traffic Signal Adaptation; No. UCB-ITS-PRR-2010-20; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Duncan, G.; Head, K.L.; Puvvala, R. Multi-modal intelligent traffic signal system-safer and more efficient intersections through a connected vehicle environment. IMSA J. 2014, 52, 12–16. [Google Scholar]
- Jimenez, F.; Aparicio, F.; Paez, J. Evaluation of in-vehicle dynamic speed assistance in Spain: Algorithm and driver behaviour. IET Intell. Trans. Syst. 2008, 2, 132–142. [Google Scholar] [CrossRef]
- Abu-Lebdeh, G. Exploring the potential benefits of intellidrive-enabled dynamic speed control in signalized networks. In Proceedings of the Transportation Research Board 89th Annual Meeting, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Morsink, P.L.; van Nes, N.; Walta, L.; Marchau, V. In-car speed assistance to improve speed management. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual Meeting, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Barbé, J.; Boy, G. On-board system design to optimize energy management. In Proceedings of the European Annual Conference on Human Decision-Making and Manual Control (EAM 2006), Valenciennes, France, 27–29 September 2006. [Google Scholar]
- Yang, Y.; Chen, S.; Sun, J. Modeling and evaluation of speed guidance strategy in VII system. In Proceedings of the 2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Madeira Island, Portugal, 19–22 September 2010. [Google Scholar]
- Mandava, S.; Boriboonsomsin, K.; Barth, M. Arterial velocity planning based on traffic signal information under light traffic conditions. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Johansson, H.; Gustafsson, P.; Henke, M.; Rosengren, M. Impact of eco-driving on emissions. In Proceedings of the 12th International Symposium, Transport and Air Pollution, Avignon, France, 16–18 June 2003. [Google Scholar]
- Nishuichi, H.; Yoshii, T. A study of the signal control for the minimization of CO2 emission. In Proceedings of the 12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005. [Google Scholar]
- Rakha, H.; Kamalanathsharma, R.K. Eco-driving at signalized intersections using V2I communication. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011. [Google Scholar]
- Barth, M.; Mandava, S.; Boriboonsomsin, K.; Xia, H. Dynamic ECO-driving for arterial corridors. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation System (FISTS), Vienna, Austria, 29 June–1 July 2011. [Google Scholar]
- Niu, D.; Sun, J. Eco-Driving versus green wave speed guidance for signalized highway traffic: A multi-vehicle driving simulator study. Procedia-Soc. Behav. Sci. 2013, 96, 1079–1090. [Google Scholar] [CrossRef]
- Sun, J.; Niu, D.; Chen, S.; Li, K. Development and Investigation of a Dynamic Eco-Driving Speed Guidance Strategy for Signalized Highway Traffic. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Adam Allen, P.E.; Ptoe, T.; Imsa, I. Developing a Traffic Signal System Optimization Plan for New Jersey, USA. Inst. Transp. Eng. ITE J. 2015, 85, 36. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Period | 8 a.m.–10 a.m. | 1 p.m.–5 p.m. | 10 p.m.–12 a.m. | Average | ||||
|---|---|---|---|---|---|---|---|---|
| Test Type | W/ITSAS | W/O ITSAS | W/ITSAS | W/O ITSAS | W/ITSAS | W/O ITSAS | W/ITSAS | W/O ITSAS |
| Average Travel Time (min) | 12 | 15 | 10 | 13 | 9 | 11 | 10.3 | 13.00 |
| Repetitions | 3 | n/a | 4 | n/a | 3 | n/a | 3 | n/a |
| Standard Deviation | 2.3 | n/a | 1.1 | n/a | 2.0 | n/a | 1.8 | n/a |
| Travel Time Saving (min) | 3 | 3 | 2 | 3.03 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Gutesa, S.; Dimitrijevic, B.; Zhang, Y.; Spasovic, L.; Singh, J. Deployment and Field Evaluation of In-Vehicle Traffic Signal Advisory System (ITSAS). Information 2017, 8, 72. https://doi.org/10.3390/info8030072
Lee J, Gutesa S, Dimitrijevic B, Zhang Y, Spasovic L, Singh J. Deployment and Field Evaluation of In-Vehicle Traffic Signal Advisory System (ITSAS). Information. 2017; 8(3):72. https://doi.org/10.3390/info8030072
Chicago/Turabian StyleLee, Joyoung, Slobodan Gutesa, Branislav Dimitrijevic, Yuchuan Zhang, Lazar Spasovic, and Jeevanjot Singh. 2017. "Deployment and Field Evaluation of In-Vehicle Traffic Signal Advisory System (ITSAS)" Information 8, no. 3: 72. https://doi.org/10.3390/info8030072
APA StyleLee, J., Gutesa, S., Dimitrijevic, B., Zhang, Y., Spasovic, L., & Singh, J. (2017). Deployment and Field Evaluation of In-Vehicle Traffic Signal Advisory System (ITSAS). Information, 8(3), 72. https://doi.org/10.3390/info8030072