Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Work
1.2. Network Parts
- (a)
- Sensor node. As mentioned above, we need to acquire accurate and regular information about sensing field monitoring for a certain geographic area. Thus, we randomly deploy a large number of sensor nodes with particular specifications, as we will mention in the next section.
- (b)
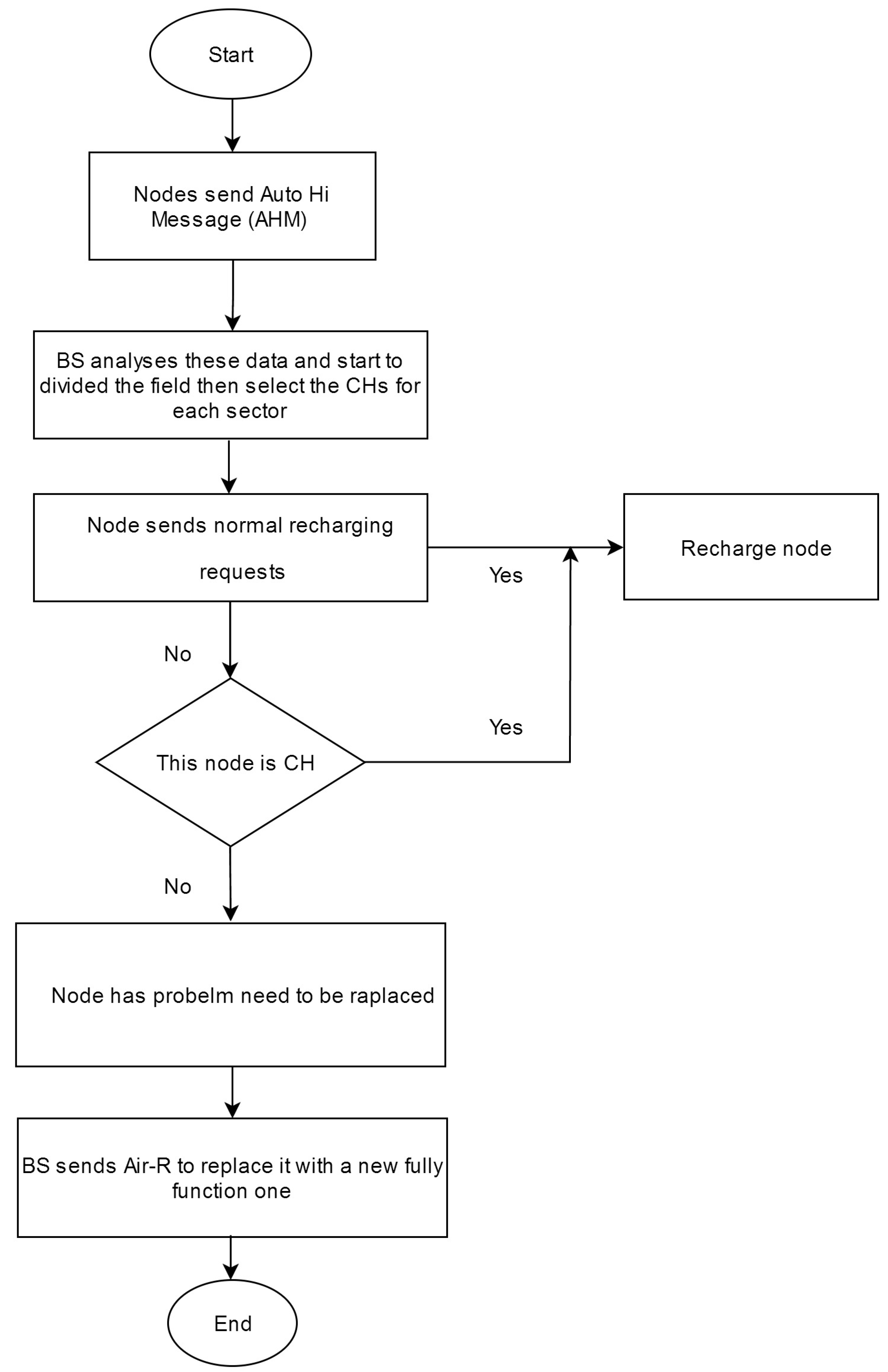
- Base Station (BS). This part exploits BS characteristics, such that it has no energy constraints. The main tasks of the BS are:
- It fully controls and manages the sensors network (sensing field).
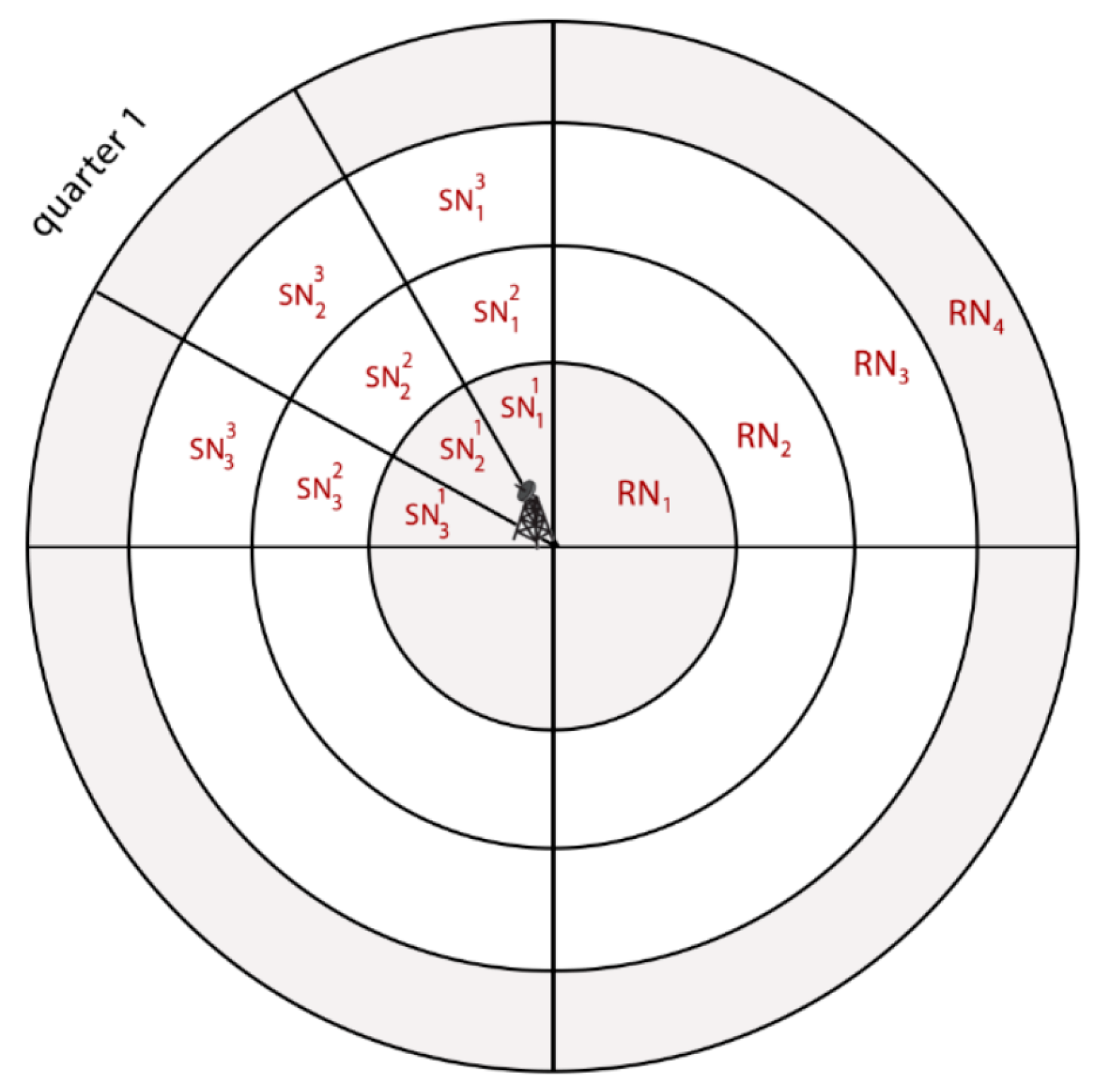
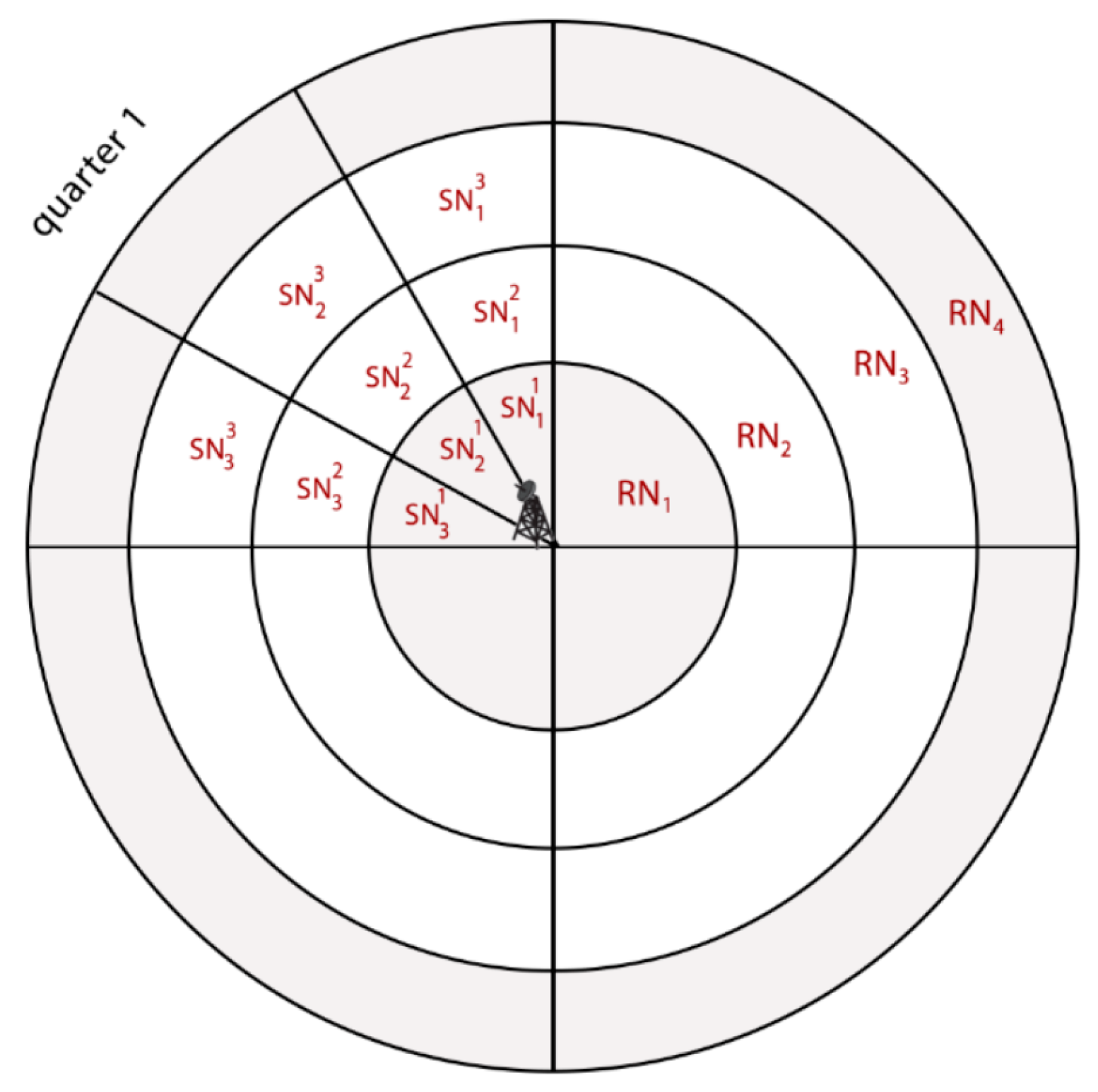
- It divides the R-WSN field into sectors, as in [24].
- It performs the clustering process and selects the cluster head (CH) periodically (according to scheduled times and residual energy).
- It continuously and periodically (as agreed beforehand) informs nodes in the sector when electing a new CH.
- It receives recharging requests from nodes with a low energy threshold and arranges the recharging trip of the MC to recharge nodes [25].
- Processing the information collected from nodes to study the activities of different nodes.
- Evaluating recharging requests to determine whether the coming requests from nodes are normal (based on KB study nodes).
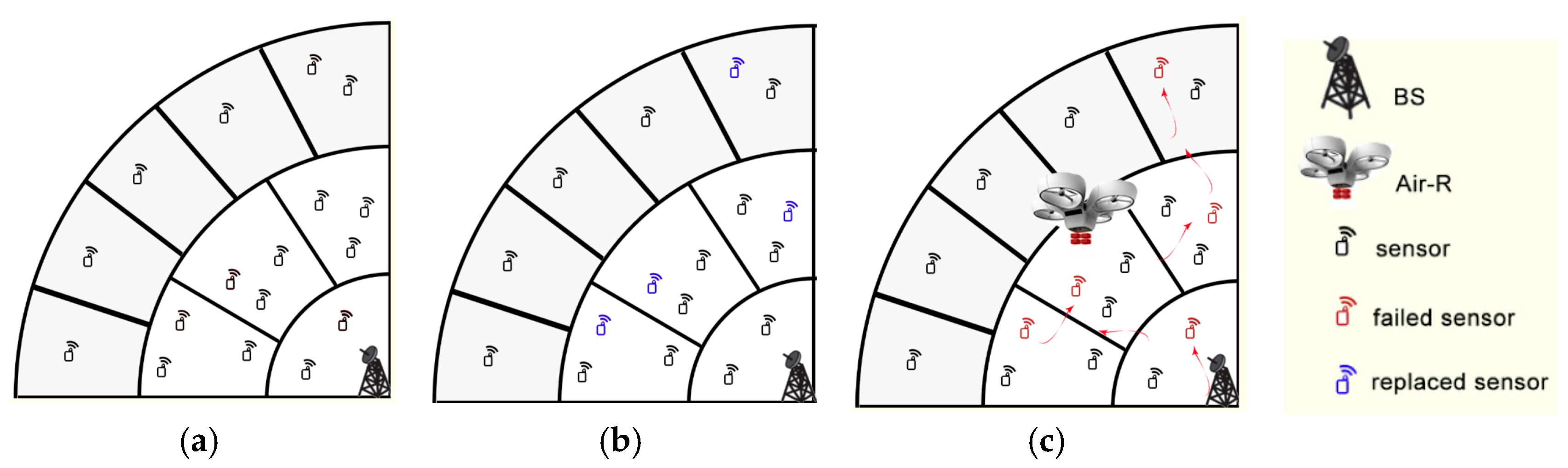
- Sending and adopting Air-R for trips to replace failed or damaged nodes in the R-WSN sensing field (the properties of Air-R are elucidated in the next sections).
- (c)
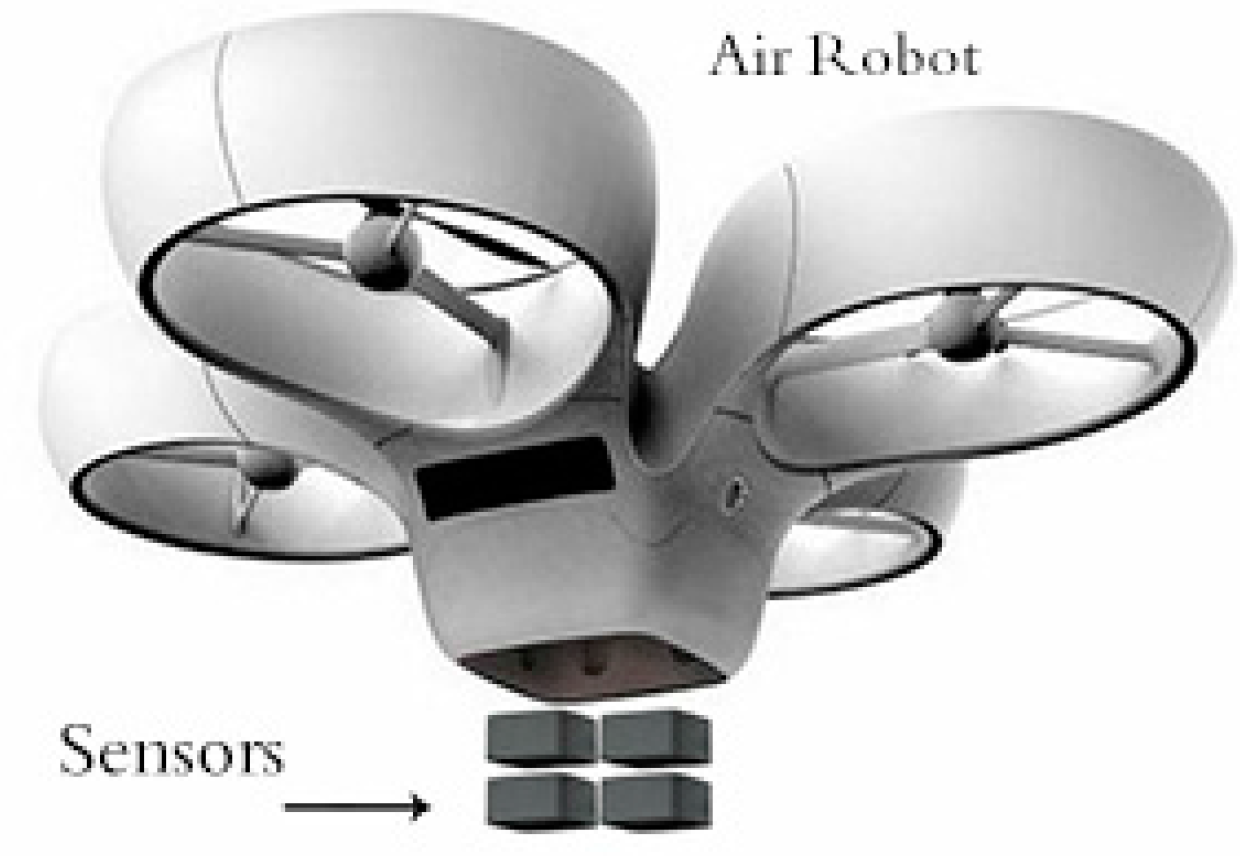
- Air-R. Air-R is used in this proposal because it can cover a large area, and has a fast moving speed and freeway movement. The replacement process is easy because Air-R is provided with location information for failed nodes, and no complicated mechanics is required to operate the failed node. Therefore, the Air-R can detect or replace failed nodes at locations that are ordinarily unreachable.
1.3. Problem Statement
- (a)
- Sensors are randomly and uniformly distributed in the field. We assume that all nodes can detect their own location in the initial deployment process. The BS then starts to divide the field into sectors, and CHs are selected for each sector (the same as in [24]).
- (b)
- The Air-R travels at a constant speed, and it is attached with a GPS to locate and replace the failure nodes.
- (c)
- Through continuous synchronized information exchange between BS and Air-R, the Air-R can determine whether it can serve additional sectors (replacing the failed node in the sectors) after completing the first mission (replacing sector nodes that are already planned before the Air-R departure).
- (d)
- The BS manages the coverage inside the sectors before the node replacement process to keep the coverage area and data transfer in the sectors [14].
2. Modeling and Formulation
2.1. Field Partitioning and Sector Area Calculation
| Algorithm 1. Find and select Cluster Head |
| Input: N set of nodes. |
| Output: select CHs for each sector. |
|
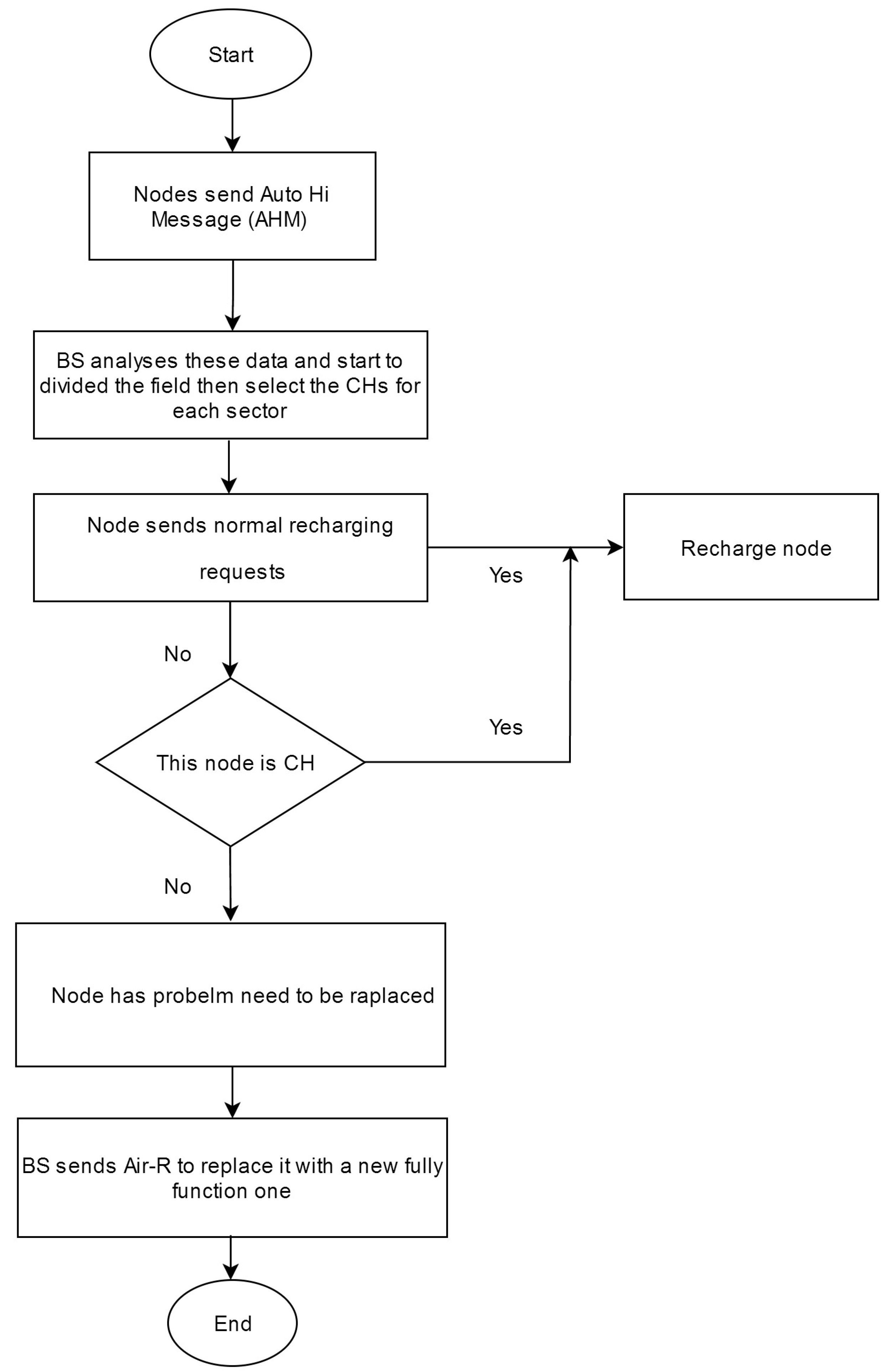
2.2. Reporting and Failure Detection
2.3. Failure Handling
2.4. Air-R
| Algorithm 2. Schedule Replacement Algorithm |
| Data: Set of sensor nodes NRs at time T |
| Result: Replacement on NRs in every round trip (RT) |
| RT within T |
|
3. Performance Evaluation
Simulation Results
- (a)
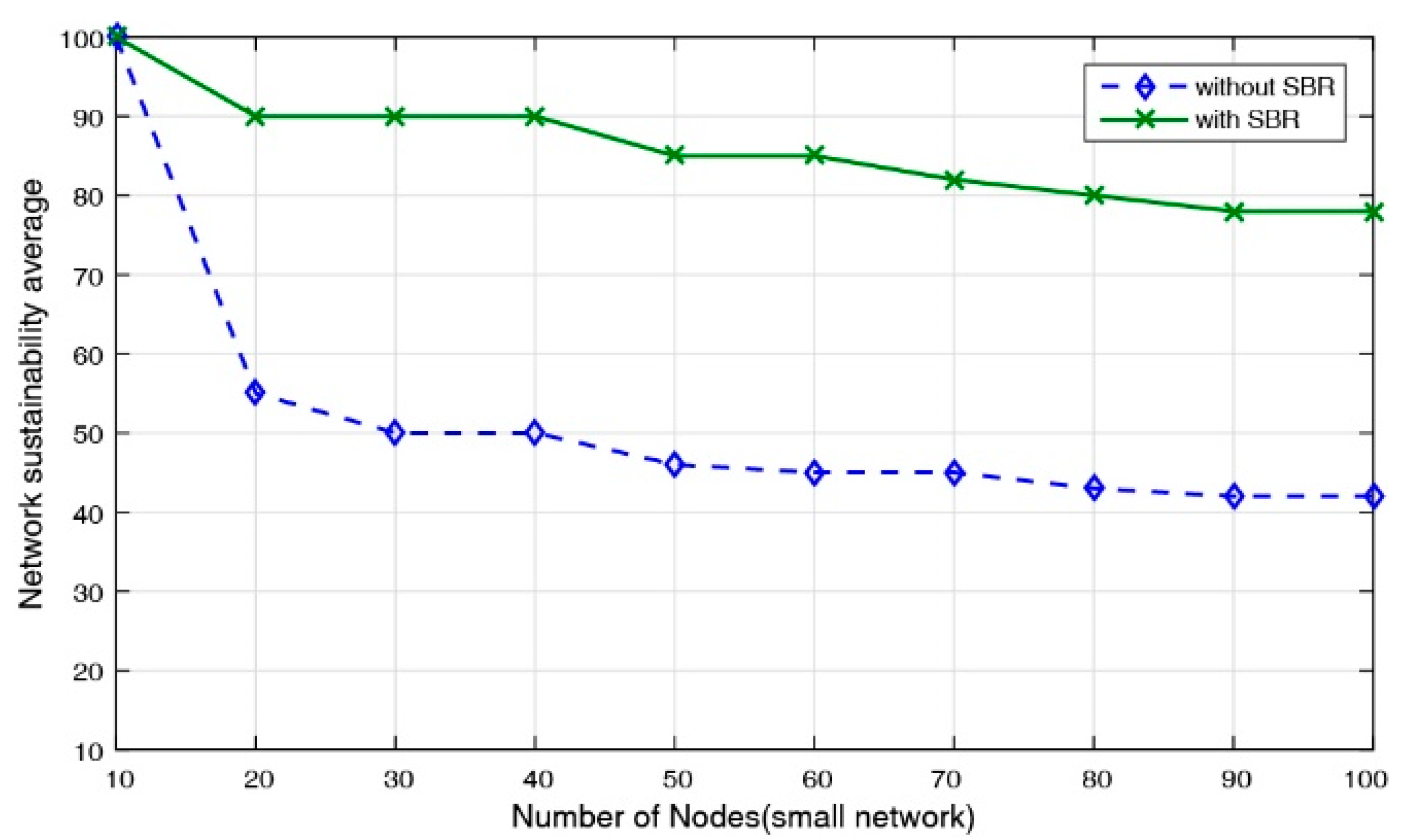
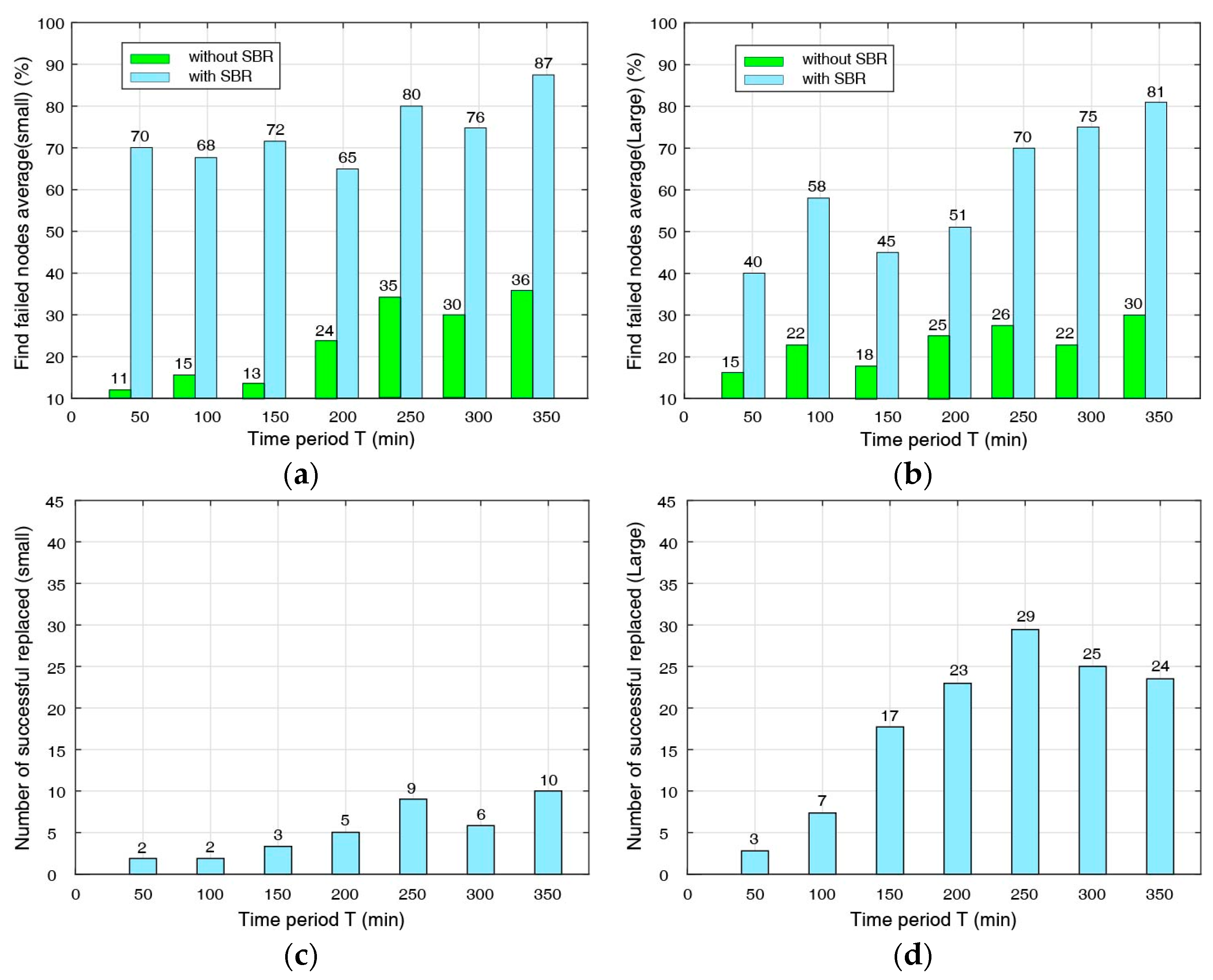
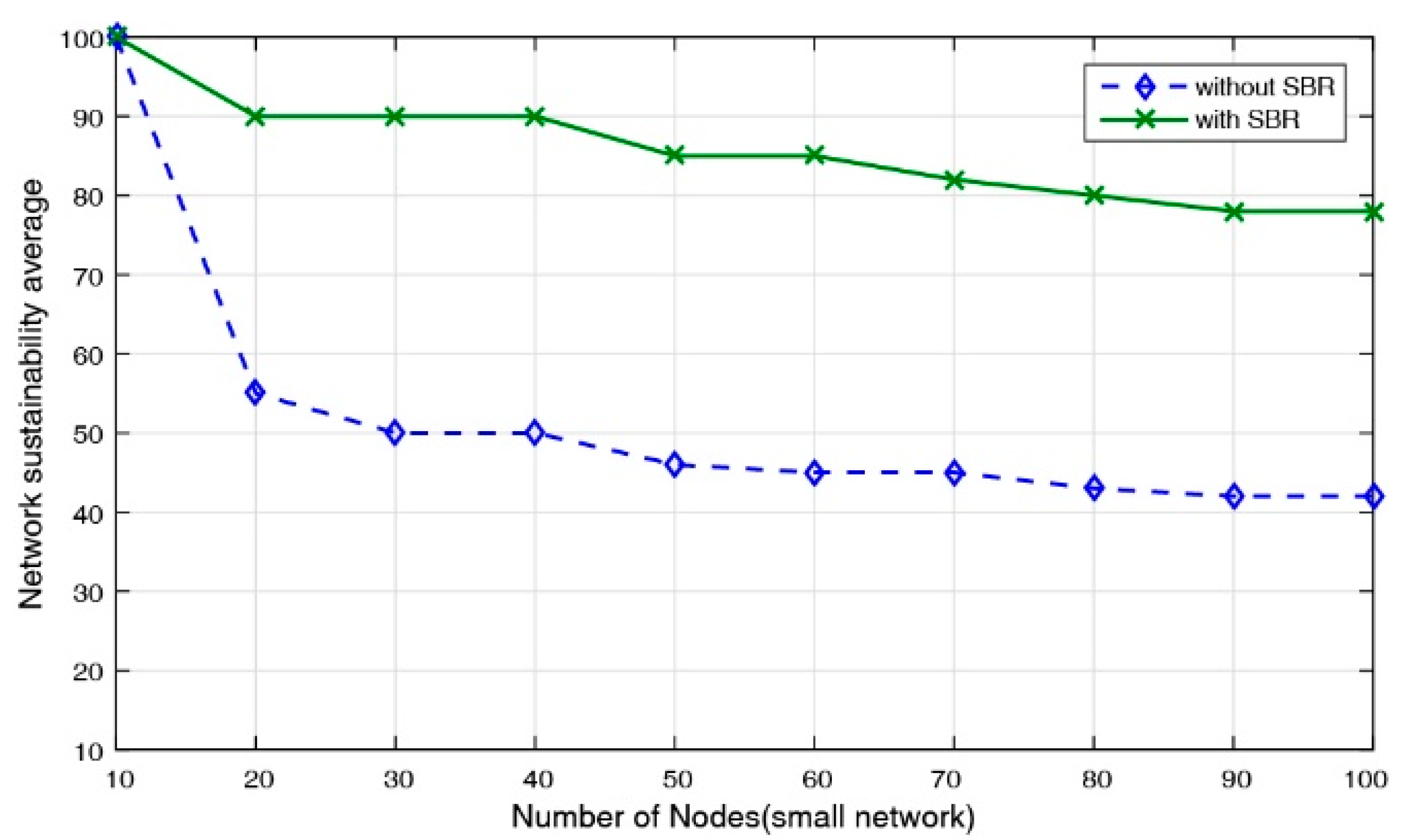
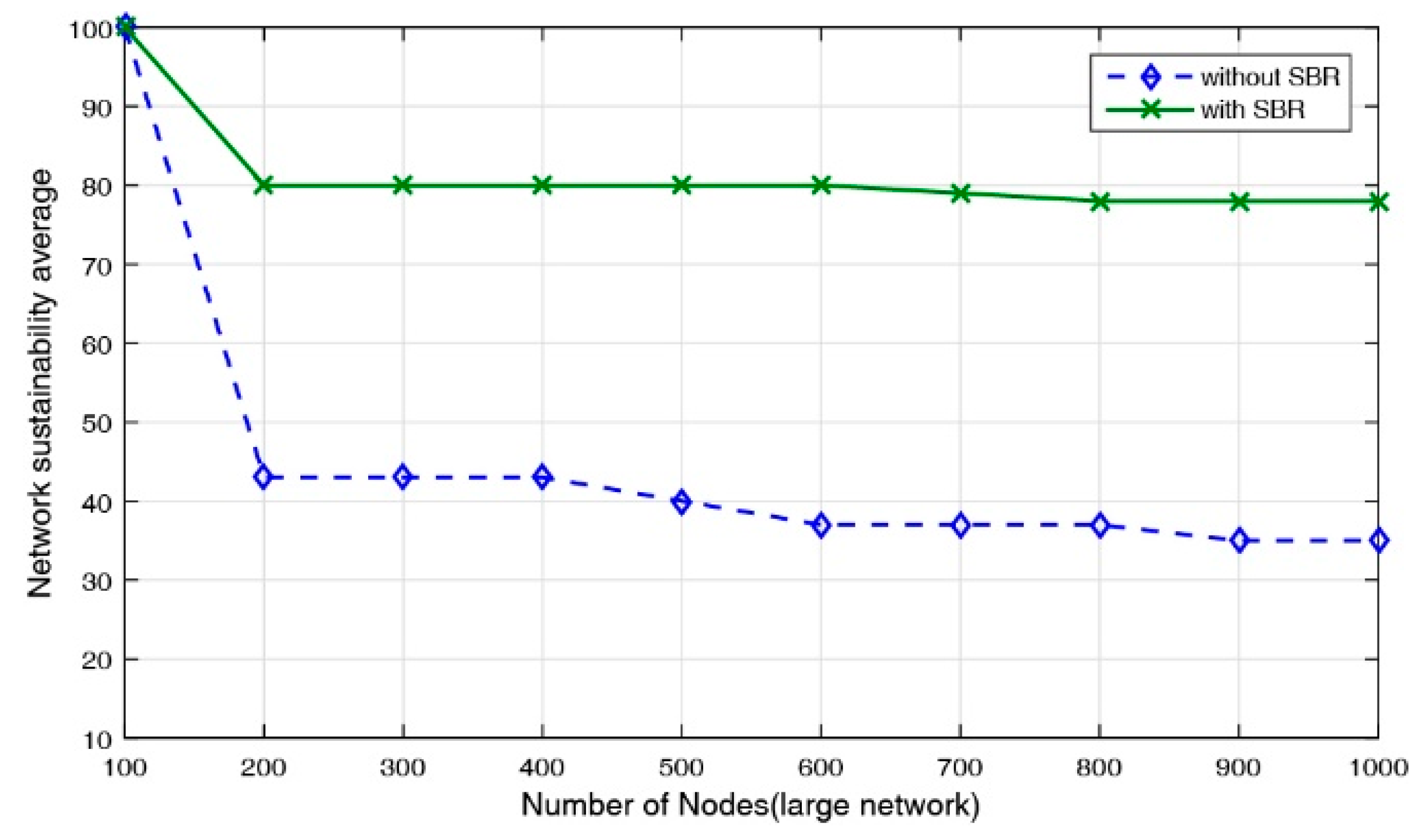
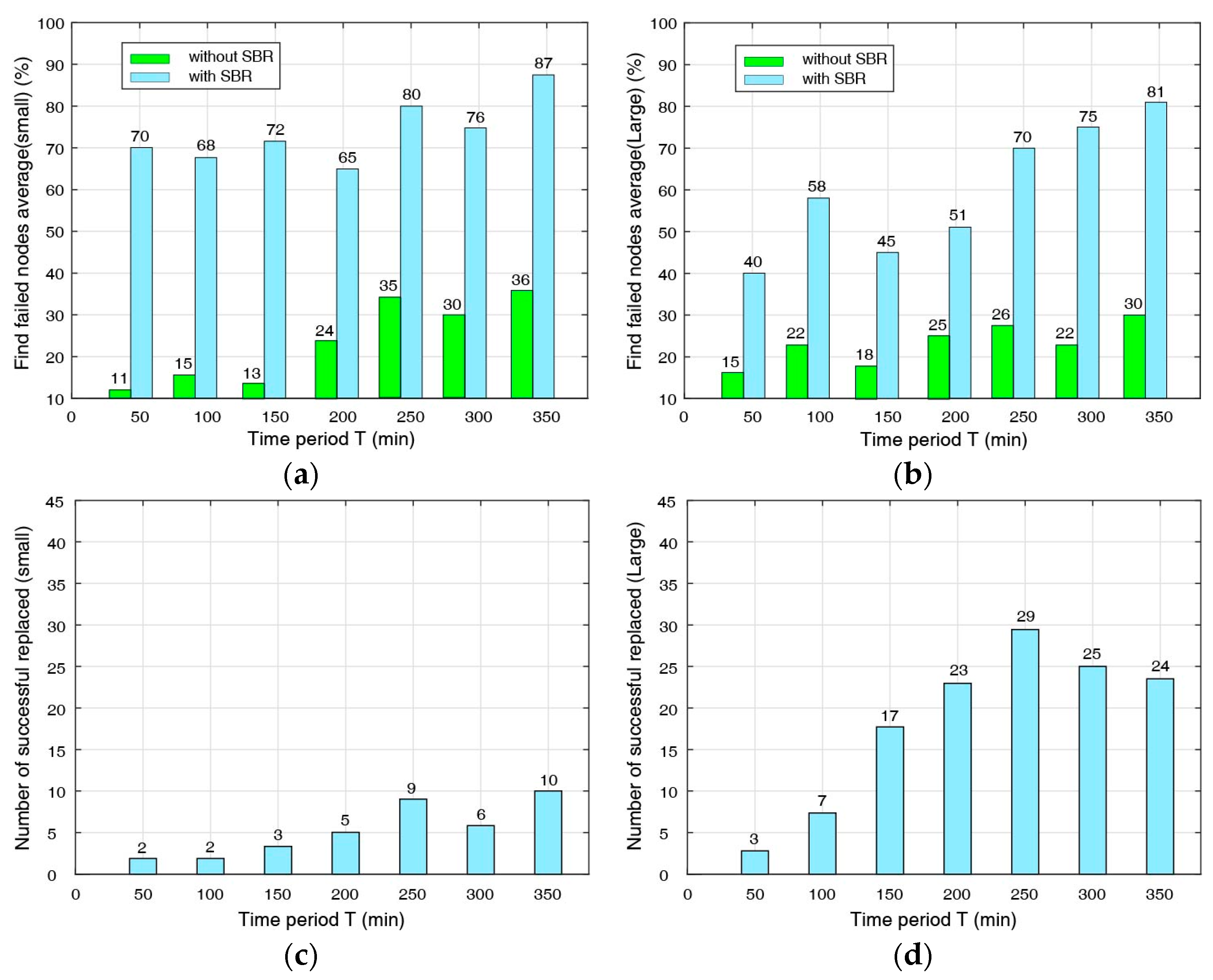
- Network efficiency and sustainability average: This parameter demonstrates the number of times the objective of keeping all sensors alive is reached when the simulation runs several times. In the proposed analysis, the solution is compared in terms of R-WSN sustainability in a small or large network. The obtained result is plotted in Figure 7. For the adopted simulation settings, the replacement techniques perform better than recharging failure nodes. This result is attributed to the fact that the time required for node replacement is significantly lower than the time needed to continuously recharge the failed nodes if failure occurs, which is a reasonable assumption. Figure 7a,b shows that the average of detecting and expecting the failure node is high in both network sizes when the SBR algorithm is applied (i.e., 87% for small R-WSN at the end of time and 36% without applying the SBR). For a large-sized network, the average is 81% with SBR and 30% without applying SBR. Therefore, the SBR technique utilizing Air-R always succeeds in keeping the network alive with high efficiency and sustainability.
- (b)
- Fast detection and the number of replaced failed nodes: These parameters give a quantitative value of the number of failed nodes each time when Air-R takes a RT (in which the SBR technique succeeds in keeping the network alive). Figure 7c, d illustrates the number of the replaced failed nodes utilizing the high capability of the BS in detecting the failed node (based on the calculation and analyzing the incoming data from the nodes through a continuous synchronized data exchange between BS and Air-R on both network sizes). Figure 7c shows the number of successful nodes replaced in the small network. Particularly, the Air-R starts to receive the replacement requests from the BS at the beginning, successfully replaces two failed nodes, and receives more replacement requests until no more requests are acquired (or it needs to come back to the BS). Similarly, Figure 7d shows the number of successful nodes replaced in the large network. The Air-R successfully replaces three failed nodes in the first 50 min (which continues to increase), and detects the failure to exploit the replacement task until no more requests are received from the BS. This condition is due to the early and fast detection of the network failure, which leads to the sustainability and high performance of the network.
- (c)
- Network performance. This parameter is the average value expressed in minutes between the network start up and the first failed node found in the network. Network performance refers to the number of nodes that have been replaced to apply network sustainability, as shown in Figure 5, Figure 6 and Figure 7 (when the failure is detected before it affects the network).
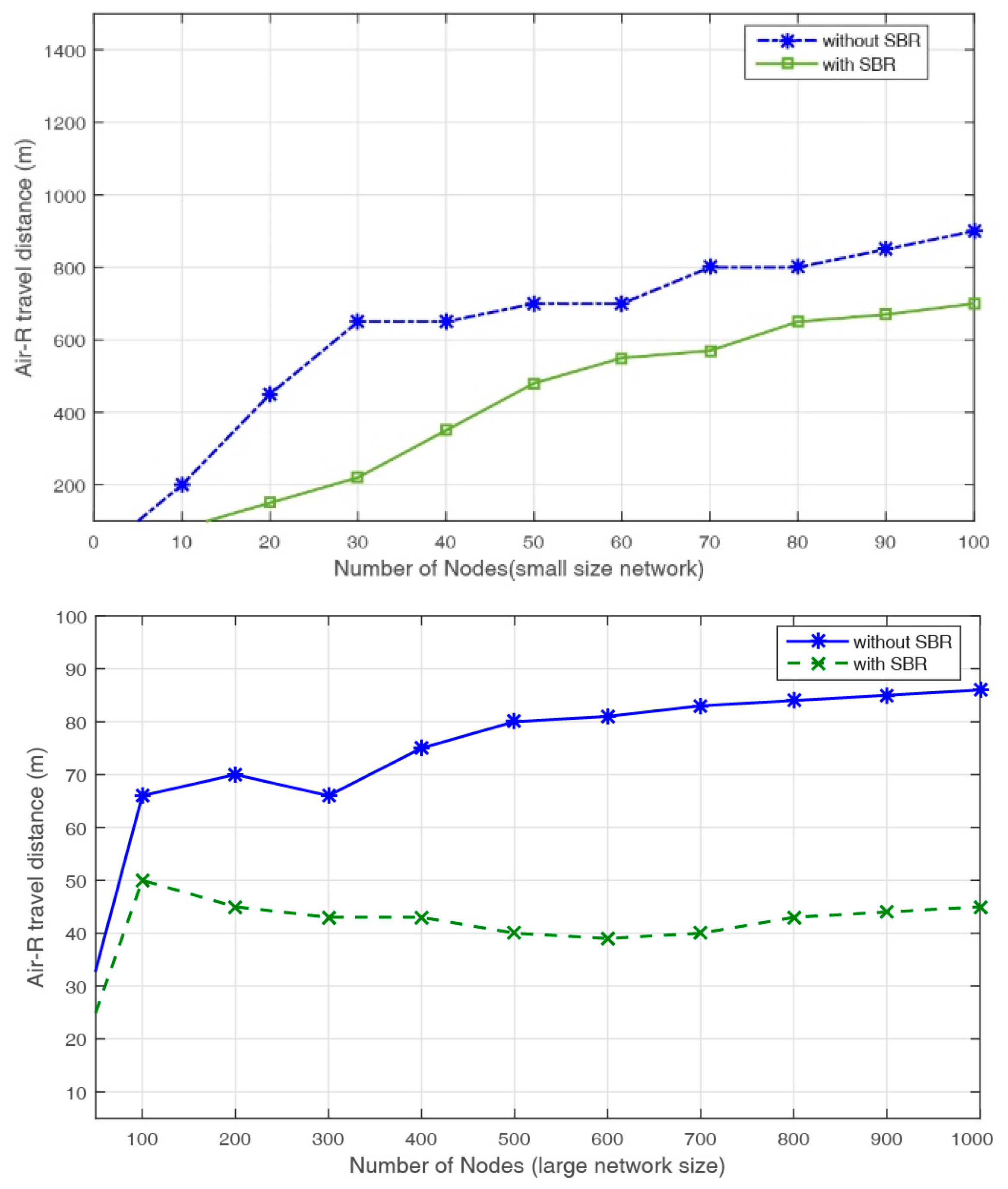
- (d)
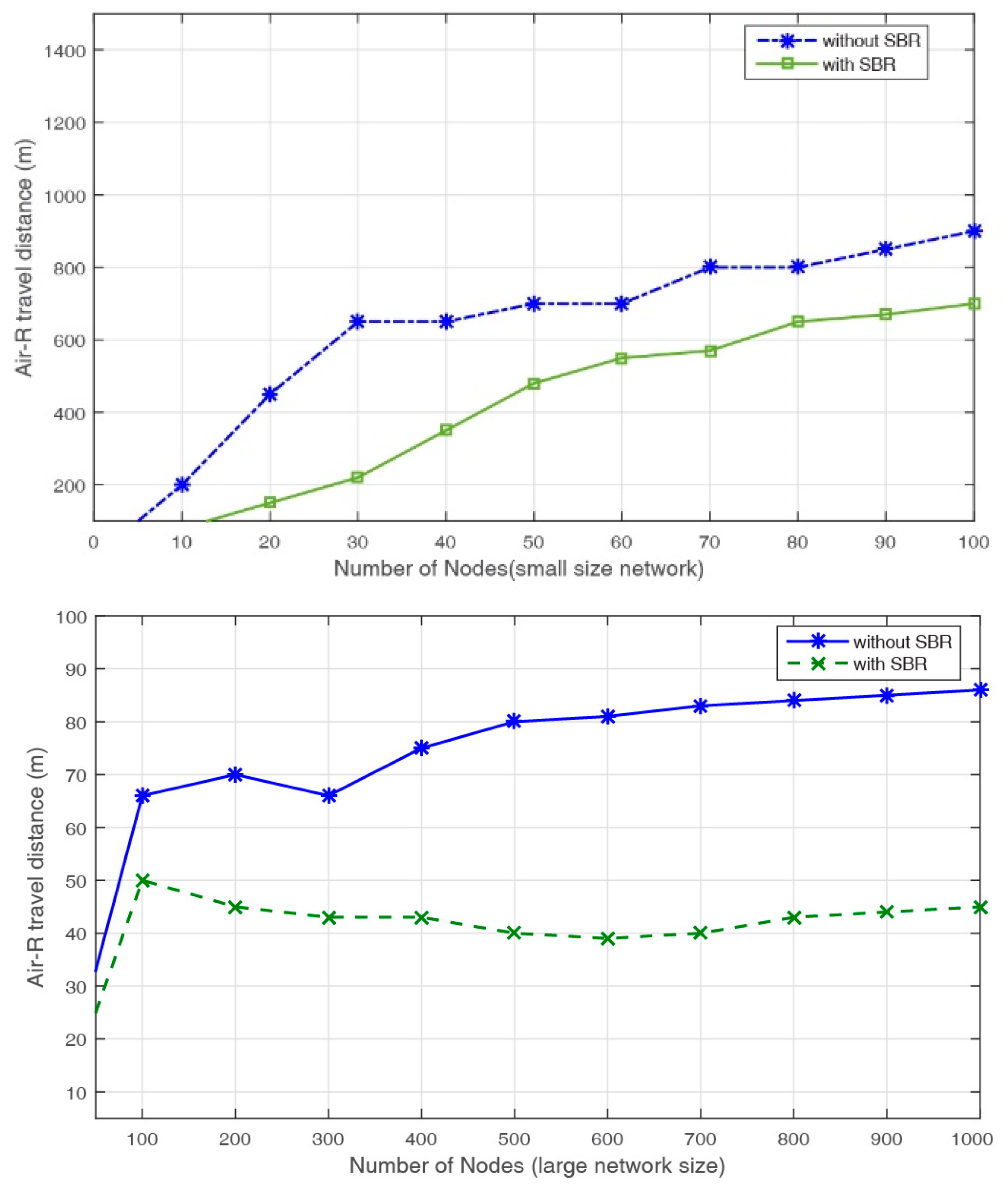
- Air-R travel distance. This parameter captures the amount of distance spent by the Air-R in flying around the network. The Air-R travel distance highlights how our proposed field partition is efficient in reducing the travel distance for the Air-R and decreasing the Air-R effort to cover the monitoring field for the replacement of the failed nodes. In particular, the adoption of the path selection (based on the TSP solution) performs the best for Air-R, as shown in Figure 8.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.; Weilian, S.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. Comput. Netw. 2002, 40, 393–422. [Google Scholar] [CrossRef]
- Watteyne, T.; Molinaro, A.; Richichi, M.; Dohler, M. From MANET To IETF ROLL Standardization: A Paradigm Shift in WSN Routing Protocols. IEEE Commun. Surv. Tutor. 2011, 13, 688–707. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Jason, H.; Sadaf, Z.; Aman, K.; Mani, S.; Vijay, R. Adaptive duty cycling for energy harvesting systems. In Proceedings of the 2006 International Symposium on Low Power Electronics and Design, Tegernsee, Germany, 4–6 October 2006. [Google Scholar]
- Aman, K.; Jason, H.; Sadaf, Z.; Mani, B.S. Power management in energy harvesting sensor networks. ACM Trans. Embed. Comput. Syst. 2007, 6. [Google Scholar] [CrossRef]
- Padberg, M.; Rinaldi, G. A branch-and-cut algorithm for the resolution of large-scale symmetric traveling salesman problems. SIAM Rev. 1991, 14, 60–100. [Google Scholar] [CrossRef]
- Michal, B.; Adam, R.; Przemyslaw, R. Wireless energy transfer for industrial applications: Theory, available solutions and perspectives. In Proceedings of the Signals and Electronic Systems (ICSES), Krakow, Poland, 5–7 September 2016; pp. 195–199. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the IEEE Sensor and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 10–18. [Google Scholar]
- Schurgers, C.; Srivastava, M.B. Energy efficient routing in wireless sensor networks. In Proceedings of the Communications for Network-Centric Operations: Creating the Information Force, Vienna, Austria, 28–31 October 2001; pp. 357–361. [Google Scholar]
- Gao, D.; Wu, G.; Liu, Y.; Zhang, F. Bounded end-to-end delay with transmission power control techniques for rechargeable wireless sensor networks. Int. J. Electron. Commun. 2014, 68, 395–405. [Google Scholar] [CrossRef]
- Celso, M.; Sunghee, M.; Sangkeum, L.; Dongsoo, H. Distributed Sensor Nodes Charged by Mobile Charger with Directional Antenna and by Energy Trading for Balancing. Sensors 2017, 17, 122. [Google Scholar]
- Xie, L.; Shi, J.; Hou, Y.T.; Sherali, H.D. Making sensor networks immortal: An energy-renewal approach with wireless power transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Parikh, S.; Vokkarane, V.M.; Xing, L.; Kasilingam, D. Node-Replacement Policies to Maintain Threshold-Coverage in Wireless Sensor Networks. In Proceedings of the 16th International Conference on Computer Communications and Networks, Honolulu, HI, USA, 13–16 August 2007; pp. 760–765. [Google Scholar]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. On-Demand Node Reclamation and Replacement for Guaranteed Area Coverage in Long-Lived Sensor Networks. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer: Berlin/Heidelberg, Germany, 2009; Volume 22, pp. 148–166. [Google Scholar]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. Towards Reliable Scheduling Schemes for Long-lived Replaceable Sensor Networks. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Falcon, R.; Li, X.; Nayak, A.; Stojmenovic, I. The one-commodity traveling salesman problem with selective pickup and delivery: An ant colony approach. In Proceedings of the IEEE Congress on Computational Intelligence Evolutionary Computation (CEC), Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Mei, Y.; Xian, C.; Das, S.; Hu, Y.C.; Lu, Y.-H. Sensor replacement using mobile robots. Comput. Commun. 2007, 30, 2615–2626. [Google Scholar] [CrossRef]
- Kalypso, M.; Dimitrios, Z.; Tahiry, R. Node Discovery and Replacement Using Mobile Robot. In Proceedings of the 4th International Conference on Ad Hoc Networks, Paris, France, 16–17 October 2012. [Google Scholar]
- Nguyen, N.T.; Liu, B.H.; Pham, V.T.; Huang, C.Y. Network under Limited Mobile Devices: A New Technique for Mobile Charging Scheduling With Multiple Sinks. IEEE Syst. J. 2016, 99, 1–11. [Google Scholar] [CrossRef]
- Liu, B.-H.; Nguyen, N.-T.; Pham, V.-T.; Lin, Y.-X. Novel methods for energy charging and data collection in wireless rechargeable sensor networks. Int. J. Commun. Syst. 2017, 30, 3050. [Google Scholar] [CrossRef]
- Angelopoulos, C.M.; Nikoletseas, S.; Raptis, T.P. Efficient energy management in wireless rechargeable sensor networks. In Proceedings of the 15th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM), New York, NY, USA, 21–25 October 2012; pp. 309–316. [Google Scholar]
- Mao, S.; Hou, Y. BeamStar: An edge-based approach to routing in wireless sensor networks. IEEE Trans. Mob. Comput. 2007, 6, 1284–1296. [Google Scholar] [CrossRef]
- Li, W.H.; Yang, C.Y. A cluster-based data routing for wireless sensor networks. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Taipei, Taiwan, 8–11 June 2009; Volume 5574, pp. 129–136. [Google Scholar]
- Fahlstrom, P.; Gleason, T. Introduction to UAV Systems; John Wiley & Sons: Chichester, UK, 2012. [Google Scholar]
- He, L.; Gu, Y.; Pan, J.; Zhu, T. On-demand charging in wireless sensor networks: Theories and applications. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems, Washington, DC, USA, 14–16 October 2013; pp. 28–36. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Hawaii International Conference on System Sciences (HICSS), Washington, DC, USA, 4–7 January 2000. [Google Scholar]
- Kang, B.; Ceder, G. Battery materials for ultrafast charging and discharging. Nature 2009, 458, 190–193. [Google Scholar] [CrossRef] [PubMed]
- Zou, T.; Lin, S.; Feng, Q.; Chen, Y. Energy-Efficient Control with Harvesting Predictions for Solar-Powered Wireless Sensor Networks. Sensors 2016, 16, 53. [Google Scholar] [CrossRef] [PubMed]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- John-Paul, O.; Sebastian, E.; Amy, B.; Baoliang, Z.; Carrick, D. Autonomous Aerial Water Sampling. In Field and Service Robotics; Springer International Publishing: Cham, Switzerland, 2013; pp. 137–151. [Google Scholar]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alkhalidi, S.M.; Wang, D.; Al-Marhabi, Z.A. Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability. Information 2017, 8, 70. https://doi.org/10.3390/info8020070
Alkhalidi SM, Wang D, Al-Marhabi ZA. Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability. Information. 2017; 8(2):70. https://doi.org/10.3390/info8020070
Chicago/Turabian StyleAlkhalidi, Sadam M., Dong Wang, and Zaid A. Al-Marhabi. 2017. "Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability" Information 8, no. 2: 70. https://doi.org/10.3390/info8020070
APA StyleAlkhalidi, S. M., Wang, D., & Al-Marhabi, Z. A. (2017). Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability. Information, 8(2), 70. https://doi.org/10.3390/info8020070