HTCRL: A Range-Free Location Algorithm Based on Homothetic Triangle Cyclic Refinement in Wireless Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. HTCRL Algorithm
3.1. Mathematical Model
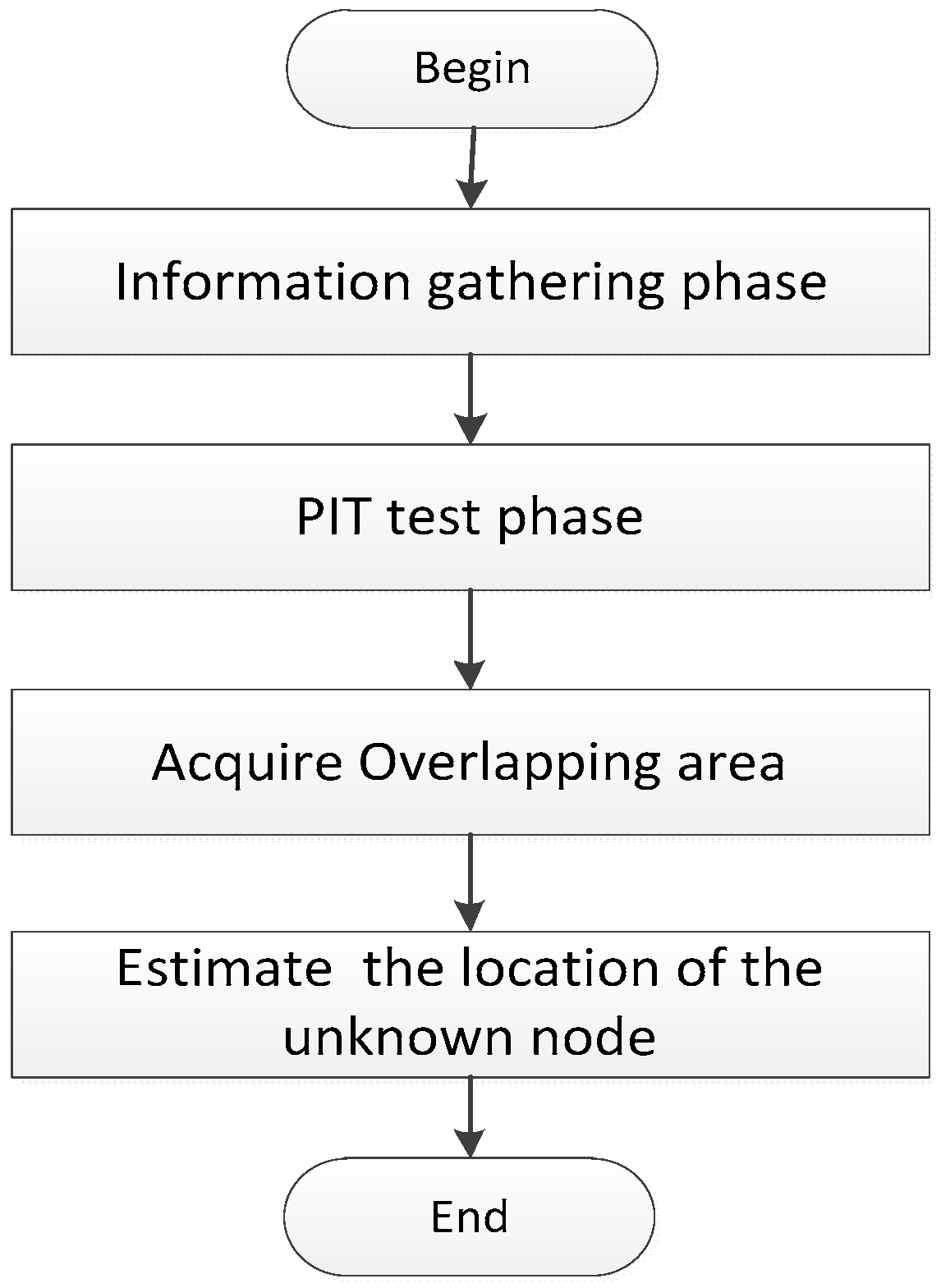
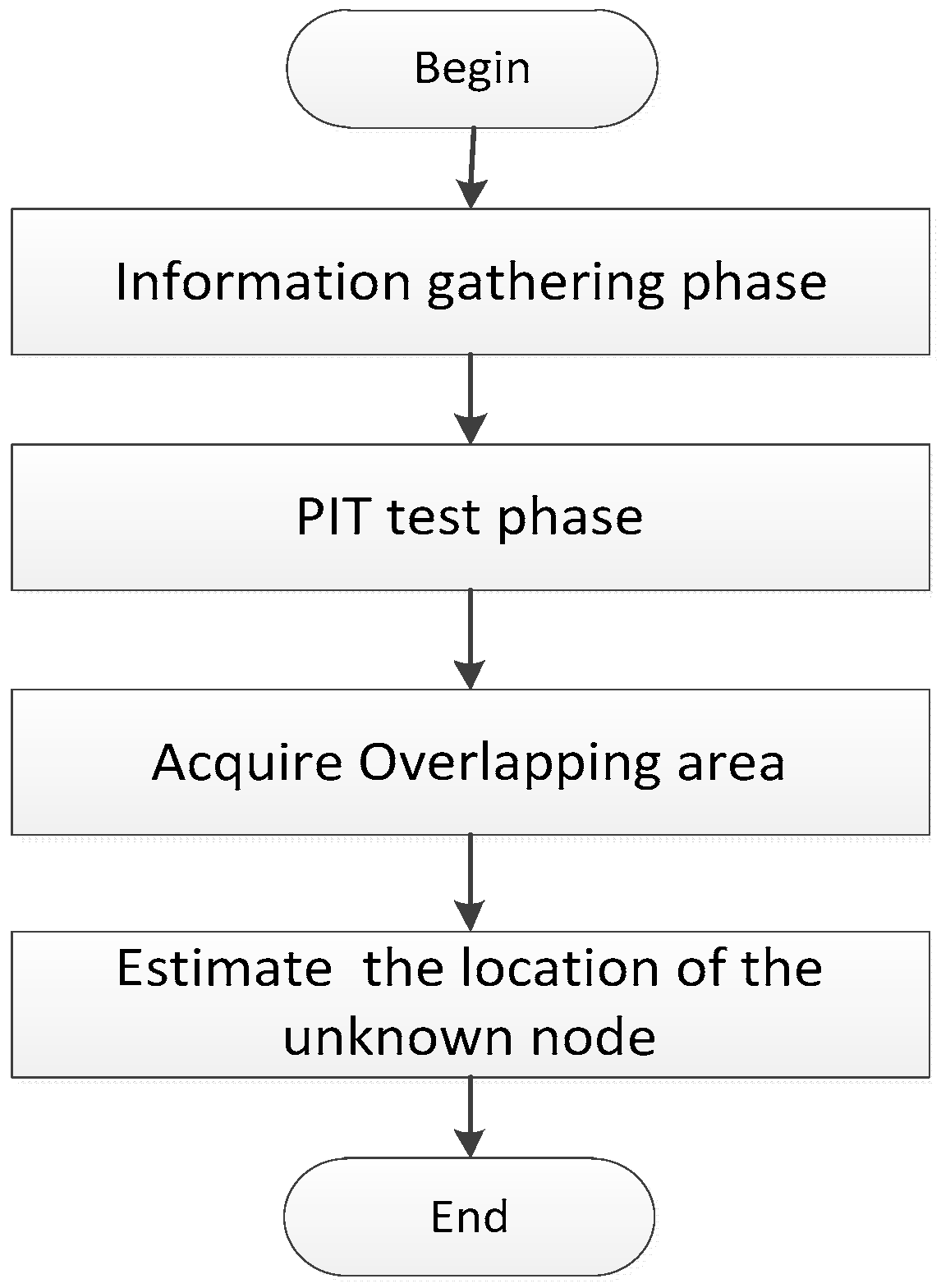
3.2. The Main Algorithm Flow Descriptions of HTCRL
4. Simulation and Result
4.1. The Parameters of Network in Experiments
4.2. The Performance of the Localization Algorithm
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hoffmann, G.M.; Tomlin, C.J. Mobile sensor network control using mutual information methods and particle filters. IEEE Trans. Autom. Control 2010, 55, 32–47. [Google Scholar] [CrossRef]
- Velimirovic, A.S.; Djordjevic, G.L.; Velimirovic, M.M.; Jovanovic, M.D. Fuzzy ring-overlapping range-free (FRORF) localization method for wireless sensor networks. Comput. Commun. 2012, 35, 1590–1600. [Google Scholar] [CrossRef]
- Sun, H.; Fang, Z.; Li, Y.; Yu, Y.; Kong, S.; Sun, Y. Research and application of wireless network equipment in coal mine gas monitoring system. J. Theor. Appl. Inf. Technol. 2012, 45, 44–48. [Google Scholar]
- Sun, H.; Fang, Z.; Qu, G. CESILA: Communication Circle External Square Intersection-Based WSN Localization Algorithm. Sens. Transducers 2013, 155, 128–135. [Google Scholar]
- Girod, L.; Estrin, D. Robust range estimation using acoustic and multimodal sensing. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 1312–1320. [Google Scholar]
- Park, J.; Park, D. Ad-Hoc Localization Method Using Ranging and Bearing. In Proceedings of the International Conference on Information Technology Convergence and Services (ITCS-2011), Gwangju, Korea, 20–22 October 2011. [Google Scholar]
- Zhou, B.; Jing, C.; Kim, Y. Joint TOA/AOA positioning scheme with IP-OFDM systems. In Proceedings of the IEEE INFOCOM, Toronto, ON, Canada, 27 April–2 May 2014; pp. 1734–1743. [Google Scholar]
- Botai, O.J.; Combrinck, L.; Rautenbach, C.J.H. On the global geodetic observing system: Africa’s preparedness and challenges. Acta Astronaut. 2013, 83, 119–124. [Google Scholar] [CrossRef]
- Papamanthou, C.; Preparata, F.P.; Tamassia, R. Algorithms for Location Estimation Based on RSSI Sampling. In Proceedings of the ALGOSENSORS, LNCS, Reykjavik, Iceland, 12 July 2008; pp. 72–86. [Google Scholar]
- Tomic, S.; Mezei, I. Improved DV-Hop localization algorithm for wireless sensor networks. In Proceedings of the IEEE 10th Jubilee International Symposium on Intelligent Systems and Informatics, Subotica, Serbia, 20–22 September 2012; pp. 389–394. [Google Scholar]
- Zhang, B.; Ji, M. A Weighted Centroid Localization Algorithm Based on DV-Hop for Wireless Sensor Network. In Proceedings of the Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012; pp. 21–23. [Google Scholar]
- Huang, X.; Huang, X.; Mao, H.; Yin, Z. Iterated Hybrid Localization Algorithm for Random Wireless Sensor Networks Based on Centroid and DV-Hop Algorithm. Appl. Mech. Mater. 2012, 182, 1854–1857. [Google Scholar]
- Zhou, Y.; Ao, X.; Xia, S. An Improved APIT Node Self-localization Algorithm in WSN. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 7582–7586. [Google Scholar]
- Holopainen, S. Influence of damage on inhomogeneous deformation behavior of amorphous glassy polymers. Modeling and algorithmic implementation in a finite element setting. Eng. Fract. Mech. 2014, 117, 28–50. [Google Scholar] [CrossRef]
- Feng, X.L.; Xu, H.Y.; Li, W.; Sun, Z.Y. Centroid position algorithm of structure optical stripe in asphalt pavement test. J. Optoelectron. Laser 2014, 3, 514–520. [Google Scholar]
- Ademuwagun, A.; Fabio, V. Reach Centroid Localization Algorithm. Wirel. Sens. Netw. 2017, 9, 87–101. [Google Scholar] [CrossRef]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-Free Localization schemes for large scale Sensor networks. In Proceedings of the 9th ACM Annual International Conference on Mobile Computing and Networking (Mobicom‘03’), San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Kaur, R.; Malhotra, J. Comparitive Analysis of DV-Hop and APIT Localization Techniques in WSN. Int. J. Future Gener. Commun. Netw. 2016, 9, 327–344. [Google Scholar] [CrossRef]
- Sun, X.; Hu, Y.; Wang, B.; Zhang, J.; Li, T. VPIT: An Improved Range-Free Localization Algorithm Using Voronoi Diagrams for Wireless Sensor Networks. Int. J. Multimed. Ubiquitous Eng. 2015, 10, 23–34. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Yao, M.; Qiu, Z. VN-APIT: Virtual nodes-based range-free APIT localization scheme for WSN. Wirel. Netw. 2016, 22, 867–878. [Google Scholar] [CrossRef]
- Sharma, R.; Malhotra, S. Approximate Point in Triangulation (APIT) based Localization Algorithm in Wireless Sensor Network. Int. J. Innov. Res. Sci. Technol. 2015, 2, 39–42. [Google Scholar]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Fang, Z.; Sun, H.; Cao, J. HTCRL: A Range-Free Location Algorithm Based on Homothetic Triangle Cyclic Refinement in Wireless Sensor Networks. Information 2017, 8, 40. https://doi.org/10.3390/info8020040
Zhang D, Fang Z, Sun H, Cao J. HTCRL: A Range-Free Location Algorithm Based on Homothetic Triangle Cyclic Refinement in Wireless Sensor Networks. Information. 2017; 8(2):40. https://doi.org/10.3390/info8020040
Chicago/Turabian StyleZhang, Dan, Zhiyi Fang, Hongyu Sun, and Jie Cao. 2017. "HTCRL: A Range-Free Location Algorithm Based on Homothetic Triangle Cyclic Refinement in Wireless Sensor Networks" Information 8, no. 2: 40. https://doi.org/10.3390/info8020040
APA StyleZhang, D., Fang, Z., Sun, H., & Cao, J. (2017). HTCRL: A Range-Free Location Algorithm Based on Homothetic Triangle Cyclic Refinement in Wireless Sensor Networks. Information, 8(2), 40. https://doi.org/10.3390/info8020040