
Real-Time Hybrid In-Station Bus Dispatching Strategy Based on Mixed Integer Programming


Abstract
:1. Introduction
2. Literature Review
3. Real-Time Hybrid Bus Dispatching Optimal Model
3.1. Problem Description and Assumption
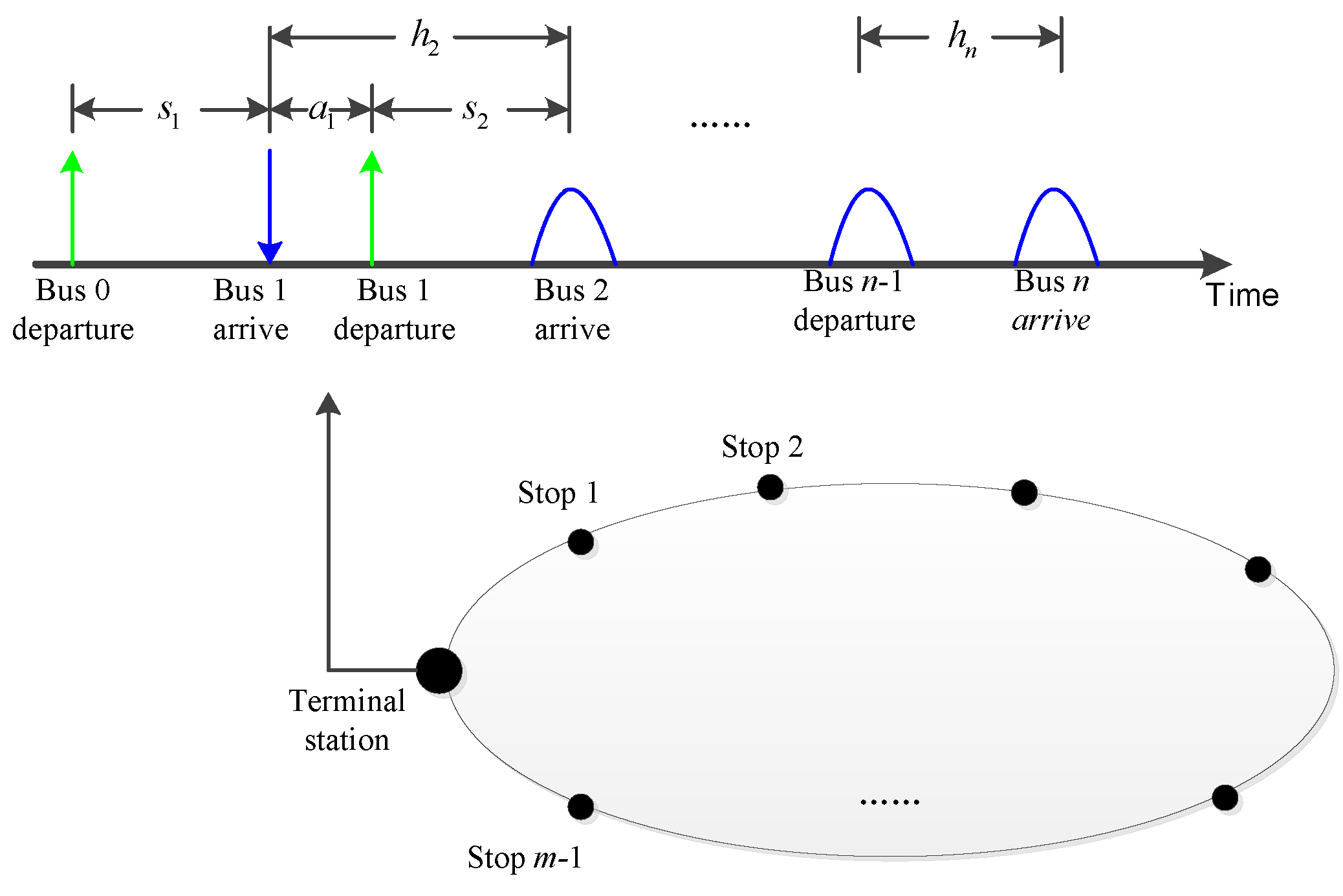
- For the sake of simplicity, the bus route is assumed to be loop-shaped and there is only one control point, which is the terminal station, to implement the holding strategy. Of course other shapes of bus route and more control points are applicable and the idea is the same.
- The arrival time and departure time of each bus at any station can be obtained in real-time by bus GPS.
- The process of acceleration and deceleration of buses around stops is ignored.
- There is a prerequisite, which is the bus arrival time prediction, for any bus dispatching strategy. In this study, the predicted inter-arrival time can be kept in its general form. In addition, it can be well replaced by any results according to the actual application.
- The stop-to-stop origin-destination (OD) matrix can be estimated.
3.2. Objective Function
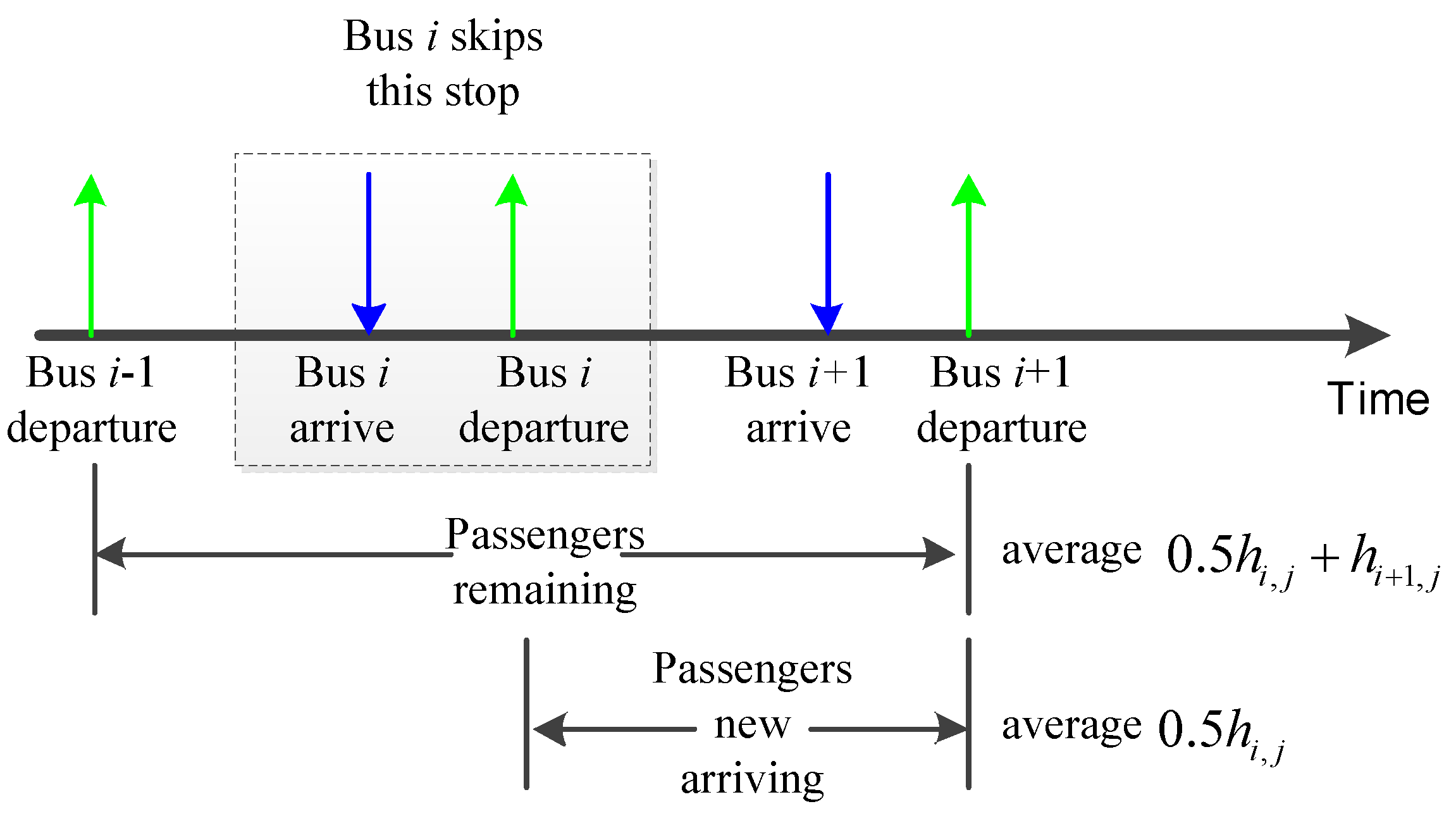
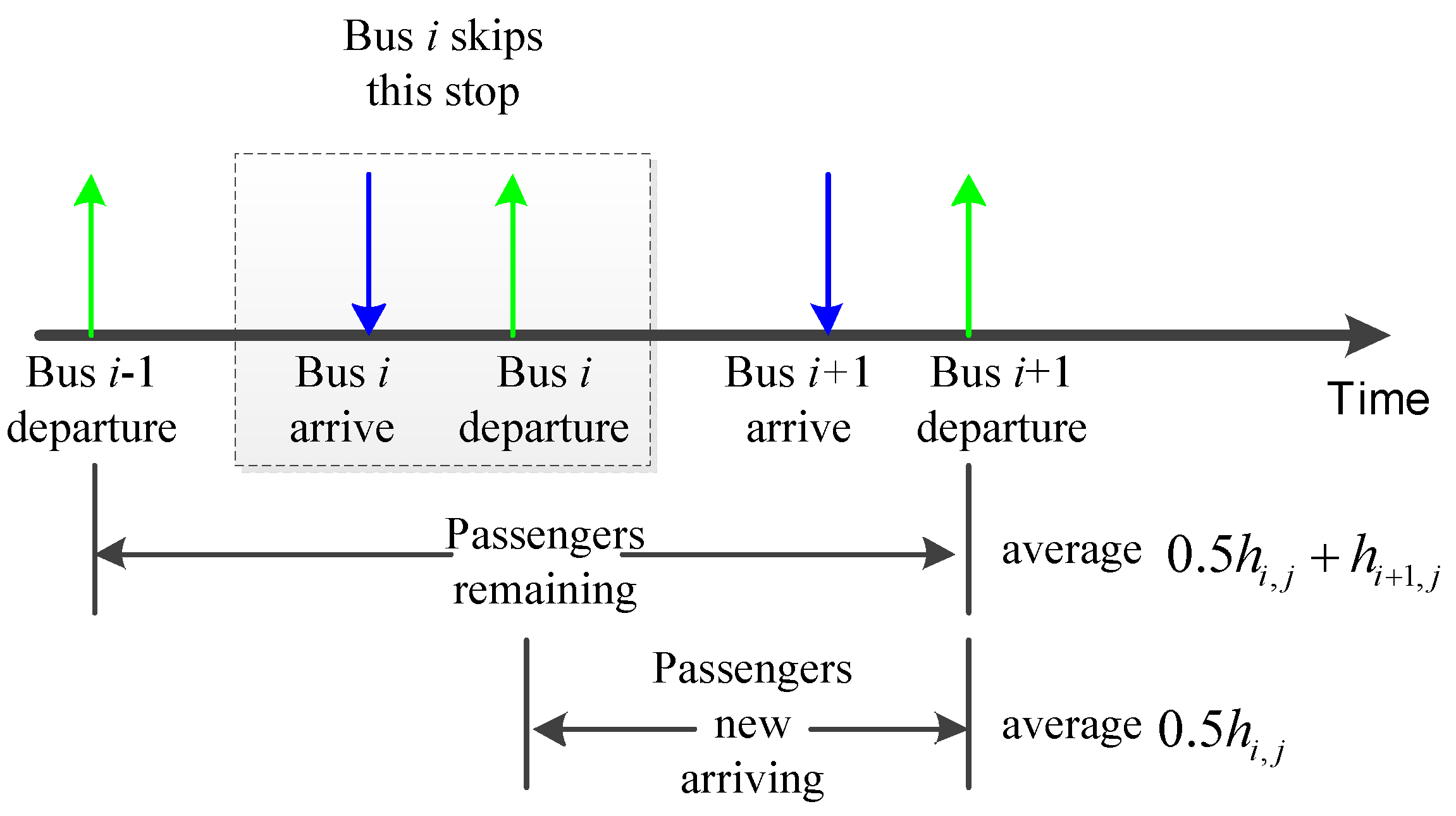
3.2.1. Passengers’ Waiting Time at Stations
3.2.2. Bus Headway Variance
3.2.3. Extra Penalties
3.2.4. The Weighted Objective Function
3.3. Constraints
3.4. Lagrangian Relaxation Algorithm
4. Numerical Example
4.1. Route Configuration and Data Description
4.2. Results and Analysis
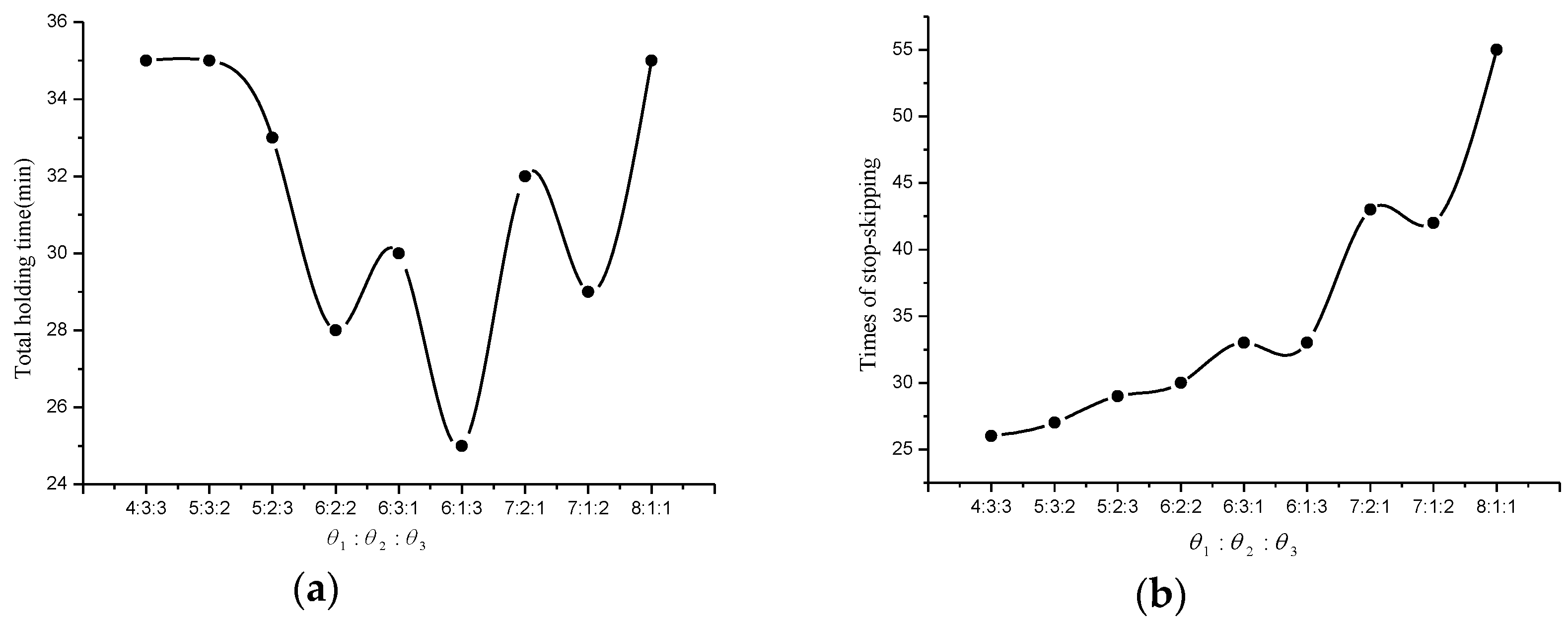
4.2.1. Sensitivity Analysis of Weighting Factors
4.2.2. Performance Evaluation Compared to Other Strategy
5. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kittelson & Associates; KFH Group; Parsons Brinckerhoff Quade & Douglass; Hunter-Zaworski, K. Quality of service. In Transit Capacity and Quality of Service Manual; Transportation Research Board: Washington, DC, USA, 2003; Volume 100, pp. 111–113. [Google Scholar]
- An, S.; Zhang, X.; Wang, J. Finding causes of irregular headways integrating data mining and AHP. ISPRS Int. J. Geo-Inf. 2015, 4, 2604–2618. [Google Scholar] [CrossRef]
- Feng, W.; Figliozzi, M. Using archived AVL/APC bus data to identify spatial-temporal causes of bus bunching. In Proceedings of the 90th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 23–27 January 2011; pp. 11–32.
- Mandelzys, M.; Hellinga, B.; Eng, P. Automatically identifying the causes of bus transit schedule adherence performance issues using AVL/APC archived data. In Proceedings of the 89th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 10–14 January 2010.
- Eberlein, X.J. Real-Time Control Strategies in Transit Operations: Models and Analysis. Ph.D. Thesis, Massachusetts Institute of Technology, Boston, MA, USA, 1995. [Google Scholar]
- Wolput, B.; Christofa, E.; Tampère, C. Optimal traffic signal settings with transit signal priority. In Proceedings of the 94th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2015; pp. 1–19.
- Guler, S.I.; Menendez, M. Analytical formulation and empirical evaluation of pre-signals for bus priority. Transp. Res. Part B 2011, 45, 1831–1845. [Google Scholar] [CrossRef]
- Eichler, M.; Daganzo, C.F. Bus lanes with intermittent priority: Strategy formulae and an evaluation. Transp. Res. Part B 2006, 40, 731–744. [Google Scholar] [CrossRef]
- Yu, B.; Kong, L.; Sun, Y.; Yao, B.Z.; Gao, Z.Y. A bi-level programming for bus lane network design. Transp. Res. Part C 2015, 55, 310–327. [Google Scholar] [CrossRef]
- Ceder, A. Bus timetables with even passenger loads as opposed to even headways. Transp. Res. Rec. 2001, 1760, 3–9. [Google Scholar] [CrossRef]
- Furth, P.G.; Muller, T.H.J. Service reliability and optimal running time schedules. Transp. Res. Rec. 2007, 2034, 55–61. [Google Scholar] [CrossRef]
- Furth, P.G.; Muller, T.H.J. Optimality conditions for public transport schedules with time point holding. Public Transp. 2009, 1, 87–102. [Google Scholar] [CrossRef]
- Zhao, J.; Dessouky, M.; Bukkapatnam, S. Optimal slack time for schedule-based transit operations. Transp. Sci. 2006, 40, 529–539. [Google Scholar] [CrossRef]
- Sun, A.; Hickman, M. The holding problem at multiple holding stations. In Computer-Aided Systems in Public Transport; Springer: Berlin, Germany, 2008; pp. 339–359. [Google Scholar]
- Zolfaghari, S.; Azizi, N.; Jaber, M.Y. A model for holding strategy in public transit systems with real-time information. Int. J. Transport. Manag. 2004, 2, 99–110. [Google Scholar] [CrossRef]
- Puong, A.; Wilson, N.H.M. A train holding model for urban rail transit systems. In Computer-Aided Systems in Public Transport; Springer: Berlin, Germany, 2008; pp. 319–337. [Google Scholar]
- Daganzo, C.F. A headway-based approach to eliminate bus bunching: Systematic analysis and comparisons. Transp. Res. Part B 2009, 43, 913–921. [Google Scholar] [CrossRef]
- Daganzo, C.F.; Pilachowski, J. Reducing bunching with bus-to-bus cooperation. Transp. Res. Part B 2011, 45, 267–277. [Google Scholar] [CrossRef]
- Bartholdi, J.J., III; Eisenstein, D.D. A self-coördinating bus route to resist bus bunching. Transp. Res. Part B 2012, 46, 481–491. [Google Scholar] [CrossRef]
- Jamili, A.; Aghaee, M.P. Robust stop-skipping patterns in urban railway operations under traffic alteration situation. Transp. Res. Part C 2015, 61, 63–74. [Google Scholar] [CrossRef]
- Wang, Y.; De Schutter, B.; Van den Boom, T.J.J.; Ning, B. Efficient Bilevel Approach for Urban Rail Transit Operation with Stop-Skipping. IEEE Trans. Intell. Transp. 2014, 15, 2658–2670. [Google Scholar] [CrossRef]
- Chen, X.; Hellinga, B.; Chang, C.; Fu, L. Optimization of Headways for Bus Rapid Transit System with Stop-skipping Control. In Proceedings of the 91th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2012; pp. 1–17.
- Chen, X.; Hellinga, B.; Chang, C.; Fu, L. Optimization of headways with stop-skipping control: A case study of bus rapid transit system. J. Adv. Transp. 2015, 49, 385–401. [Google Scholar] [CrossRef]
- Ercolano, J.M. Limited-stop bus operations: An evaluation. Transp. Res. Rec. 1984, 994, 24–29. [Google Scholar]
- Li, Y.; Rousseau, J.; Gendreau, M. Real time scheduling on a transit bus route: A 0–1 stochastic programming model. In Proceedings of the Thirty-Third Transportation Research Forum, Arlington, VA, USA, 31 October–2 November1991; pp. 157–166.
- Fu, L.; Liu, Q.; Calamai, P. Real-time optimization model for dynamic scheduling of transit operations. Transp. Res. Rec. 2003, 1857, 48–55. [Google Scholar] [CrossRef]
- Sun, A.; Hickman, M. The real-time stop-skipping problem. J. Intell. Transport. Syst. 2005, 9, 91–109. [Google Scholar] [CrossRef]
- Liu, Z.; Yan, Y.; Qu, X.; Zhang, Y. Bus stop-skipping scheme with random travel time. Transp. Res. Part C 2013, 35, 46–56. [Google Scholar] [CrossRef]
- Cortés, C.E.; Sáez, D.; Milla, F.; Nunez, A.; Riquelme, M. Hybrid predictive control for real-time optimization of public transport systems’ operations based on evolutionary multi-objective optimization. Transp. Res. Part C 2010, 18, 757–769. [Google Scholar] [CrossRef]
- Delgado, F.; Muñoz, J.C.; Giesen, R.; Cipriano, A. Real-time control of buses in a transit corridor based on vehicle holding and boarding limits. Transp. Res. Rec. 2009, 2090, 59–67. [Google Scholar] [CrossRef]
- Delgado, F.; Munoz, J.C.; Giesen, R. How much can holding and/or limiting boarding improve transit performance? Transp. Res. Part B 2012, 46, 1202–1217. [Google Scholar] [CrossRef]
- Luh, P.B.; Hoitomt, D.J.; Max, E.; Pattipati, K.R. Schedule generation and reconfiguration for parallel machines. IEEE Trans. Rob. Autom. 1990, 6, 687–696. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, X.; Jian, W. Commuter travel identification based on bus IC data. In Proceedings of the 13th COTA International Conference of Transportation Professionals (CICTP), Shenzhen, China, 13–16 August 2013; pp. 1547–1555.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Definition |
|---|---|
| Total number of buses of the studied route | |
| Total number of stops the studied route | |
| Decision variable, 0-1 variable, when bus stops at station , ; otherwise, | |
| Decision variable, holding time of bus at the terminal station | |
| Time interval between departure time of bus and arrival time of bus at the terminal station | |
| The predicted inter-arrival time between bus and bus at stop , i.e., the bus headway |
| LINENAME | BUSNAME | ARRIVEDATE | ARRIVETIME | LEAVEDATE | LEAVETIME | STATIONNO |
|---|---|---|---|---|---|---|
| 110 | 3378 | 2015-03-12 | 08:27:39 | 2015-03-12 | 08:28:29 | 26 |
| 110 | 3389 | 2015-03-12 | 08:28:40 | 2015-03-12 | 08:29:10 | 13 |
| 110 | 3396 | 2015-03-12 | 08:22:29 | 2015-03-12 | 08:23:18 | 5 |
| 110 | 3377 | 2015-03-12 | 08:17:02 | 2015-03-12 | 08:21:17 | 22 |
| 110 | 3377 | 2015-03-12 | 08:21:18 | 2015-03-12 | 08:21:18 | 23 |
| 110 | 3377 | 2015-03-12 | 08:21:19 | 2015-03-12 | 08:23:01 | 24 |
| 110 | 3412 | 2015-03-12 | 08:28:34 | 2015-03-12 | 08:28:48 | 10 |
| 110 | 3396 | 2015-03-12 | 08:28:34 | 2015-03-12 | 08:29:02 | 8 |
| CardID | PosID | LineNO | Date | Time |
|---|---|---|---|---|
| 1500000000001007 | 313011090 | 110 | 20150312 | 08:27:39 |
| 1500000000001007 | 313011090 | 110 | 20150312 | 16:27:17 |
| 1500000000001017 | 313010743 | 110 | 20150312 | 08:29:02 |
| 1500000000001017 | 313010743 | 110 | 20150312 | 18:23:50 |
| 1500000000001031 | 313011002 | 110 | 20150312 | 08:28:34 |
| 1500000000001031 | 313010985 | 110 | 20150312 | 17:22:10 |
| Indicators | Holding Only | Stop-Skipping Only | Hybrid Strategy Proposed |
|---|---|---|---|
| Passengers’average waiting time (min) | 4.80 | 5.60 | 5.20 |
| Passengers’average traveltimecoefficient | 1.48 | 1.45 | 1.32 |
| Average travel time of whole route (min) | 74.20 | 56.30 | 62.00 |
| Average bus headway (min) | 5.10 | 5.80 | 5.30 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, S.; Zhang, X. Real-Time Hybrid In-Station Bus Dispatching Strategy Based on Mixed Integer Programming. Information 2016, 7, 43. https://doi.org/10.3390/info7030043
An S, Zhang X. Real-Time Hybrid In-Station Bus Dispatching Strategy Based on Mixed Integer Programming. Information. 2016; 7(3):43. https://doi.org/10.3390/info7030043
Chicago/Turabian StyleAn, Shi, and Xinming Zhang. 2016. "Real-Time Hybrid In-Station Bus Dispatching Strategy Based on Mixed Integer Programming" Information 7, no. 3: 43. https://doi.org/10.3390/info7030043
APA StyleAn, S., & Zhang, X. (2016). Real-Time Hybrid In-Station Bus Dispatching Strategy Based on Mixed Integer Programming. Information, 7(3), 43. https://doi.org/10.3390/info7030043