
Indoor Positioning and Tracking System in a Multi-Level Residential Building Using WiFi


Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- We developed and extensively experimented on a WiFi-based indoor monitoring and tracking system deployed in a residential building that is a three-story apartment, has heterogeneous floor arrangements, allows for dynamic movements, and was tested under varying weather conditions. Our Indoor Positioning System relies on a non-uniform floor deployment of WiFi routers, as determined by the household setup. From an initial deployment of nine (9) Access Points for high-accuracy monitoring and tracking, we exploited WiFi wall-penetrating signals to reduce the number of APs needed to still obtain an acceptable indoor movement accuracy.
- We adapted the fingerprinting method in the characterization of an indoor space by employing the time-series (set) and averaged RSSI measurements as captured and stored by an Android mobile application that we also developed. This comparison of utilizing stored RSSI data allowed the group to only operate on high-performance mobile phones.
- To achieve indoor monitoring and tracking, we estimated the target’s location by adopting and comparing three well-known methods, namely, (i) TRRS, (ii) PSO + DBSCAN, and (iii) K-Nearest Neighbors techniques. For the PSO + DBSCAN, and KNN methods, we developed distance metrics that will relate the correlation between the offline and online fingerprints. We incorporated Density-Based Spatial Clustering of Applications with Noise (DBSCAN) to remove outliers and increase accuracy. On the other hand, TRRS depends on the RSSI data length to be correlated in estimating its location.
2. Literature Review
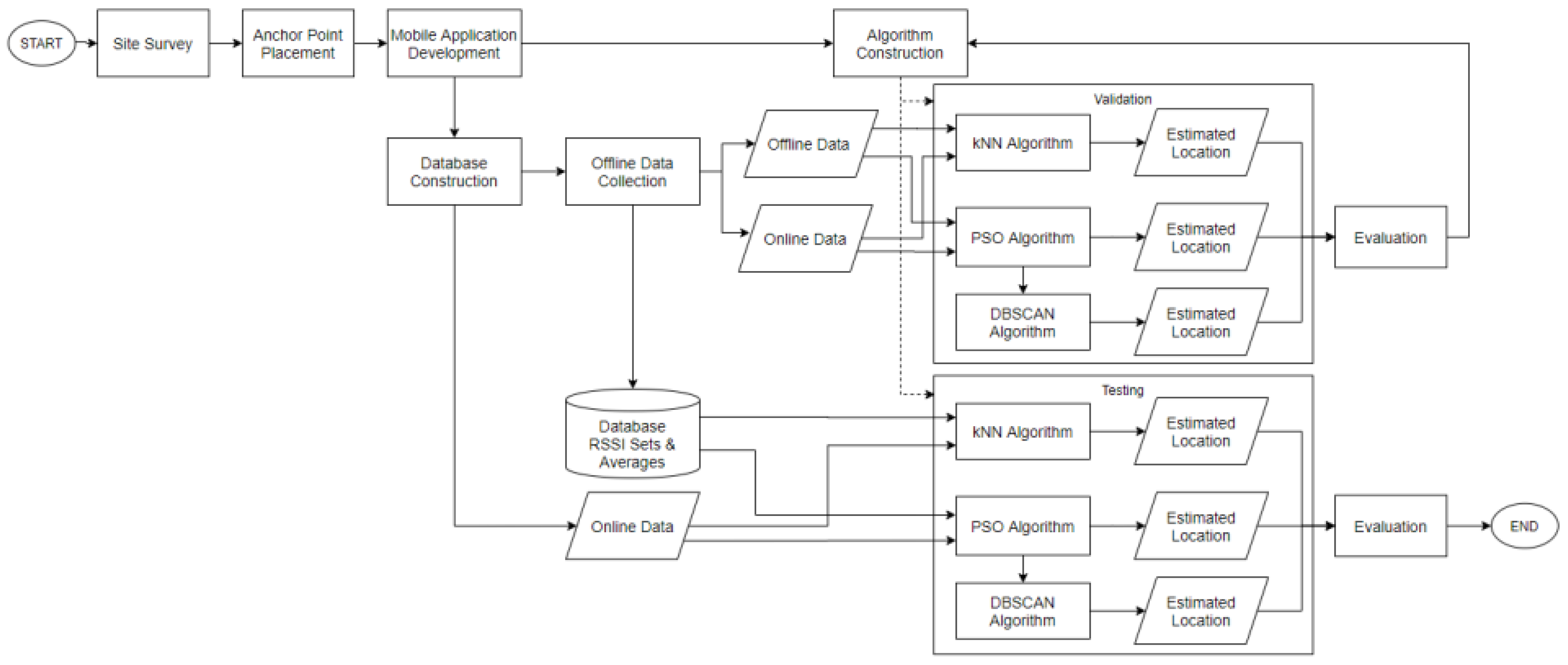
3. Materials and Methodology
3.1. Experimental Setup
3.2. Offline Data Collection
3.3. Online Data Collection
3.4. Indoor Target Localization Techniques
3.4.1. K Nearest Neighbor Technique
| Algorithm 1 K Nearest Neighbor Indoor Monitoring and Tracking Algorithm |
| INPUT: Online RSSI Readings K—number of Nearest Neighbors OUTPUT: Estimated location
|
3.4.2. PSO + DBSCAN Techniques
| Algorithm 2 Particle Swarm Optimization Algorithm |
| INPUT: Online RSSI Readings K-number of Nearest Neighbors OUTPUT: Estimated location
|
| Algorithm 3 Particle Swarm Optimization Algorithm Continuation |
|
3.4.3. Time Reversal Resonating Strength (TRRS) Technique
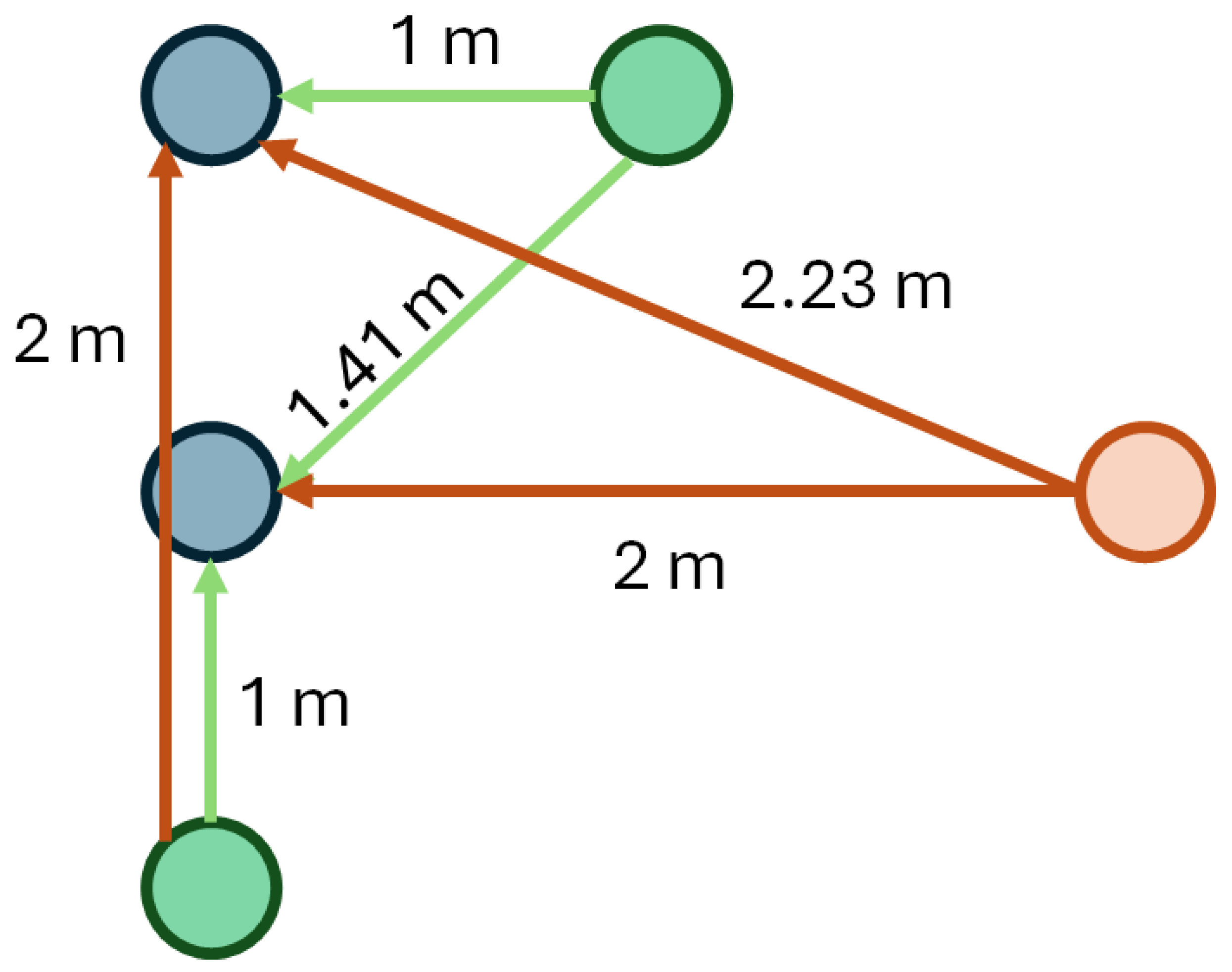
3.5. Distance Metrics
4. Experimental Results and Discussion
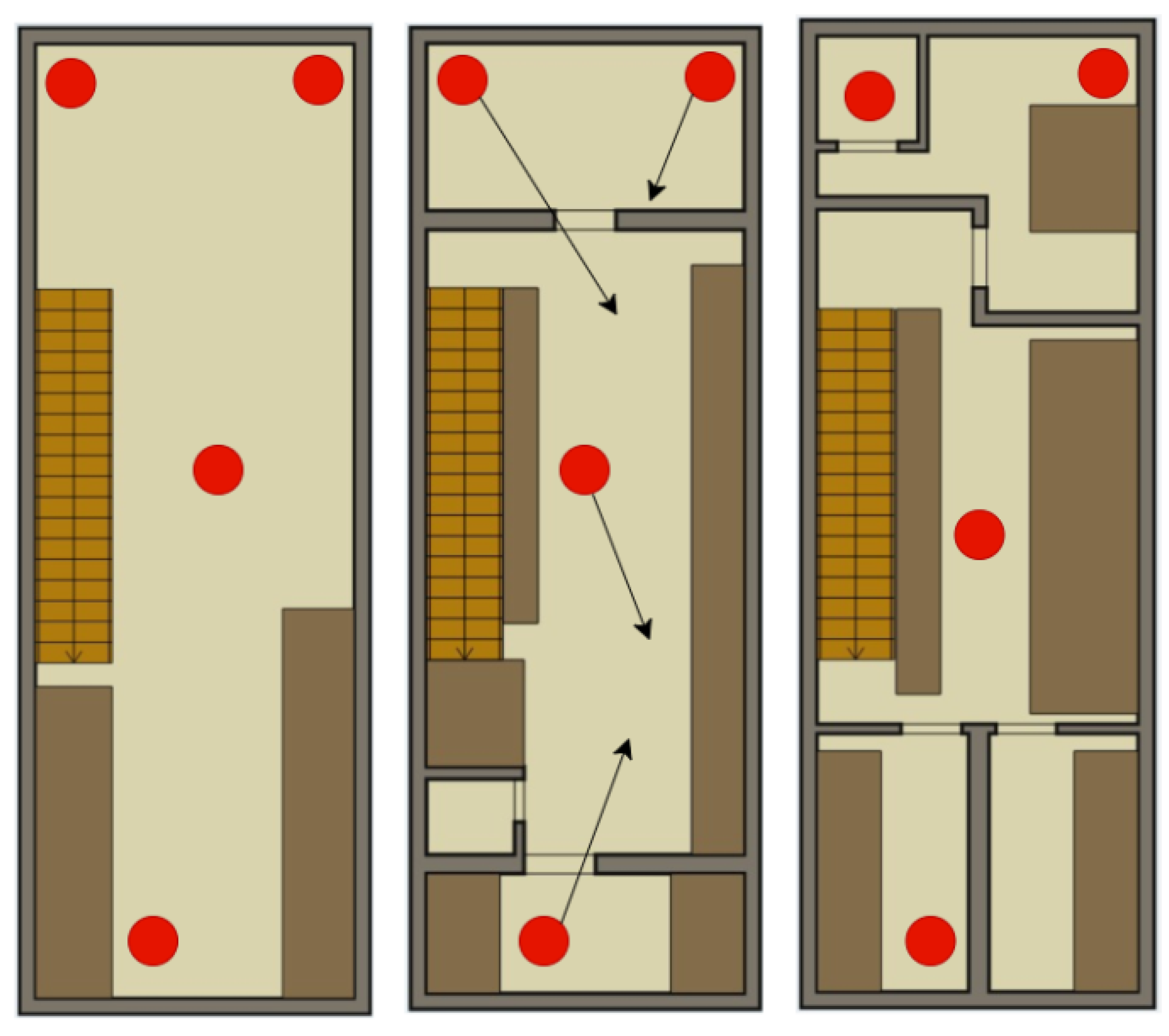
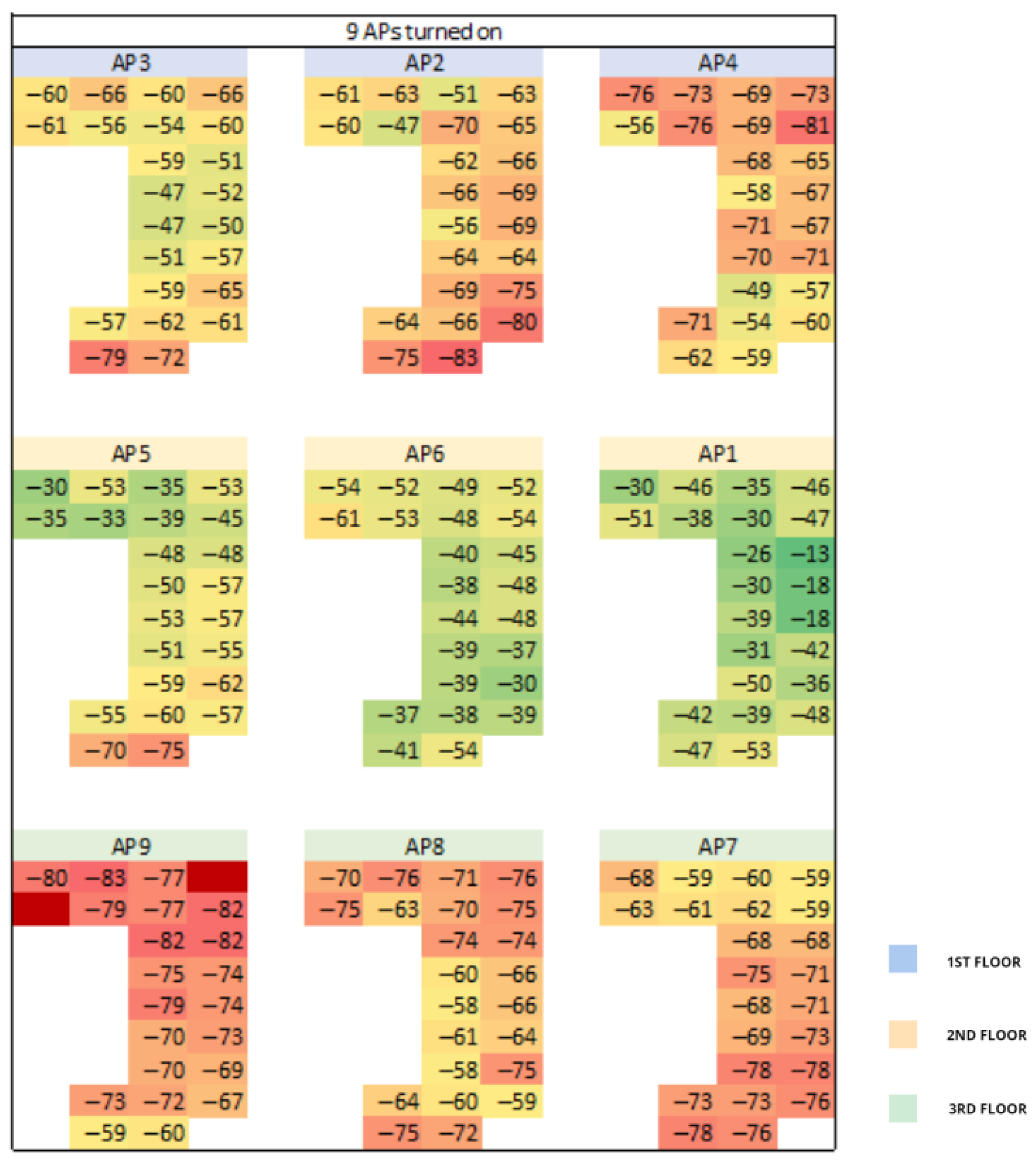
4.1. Anchor Point Placement
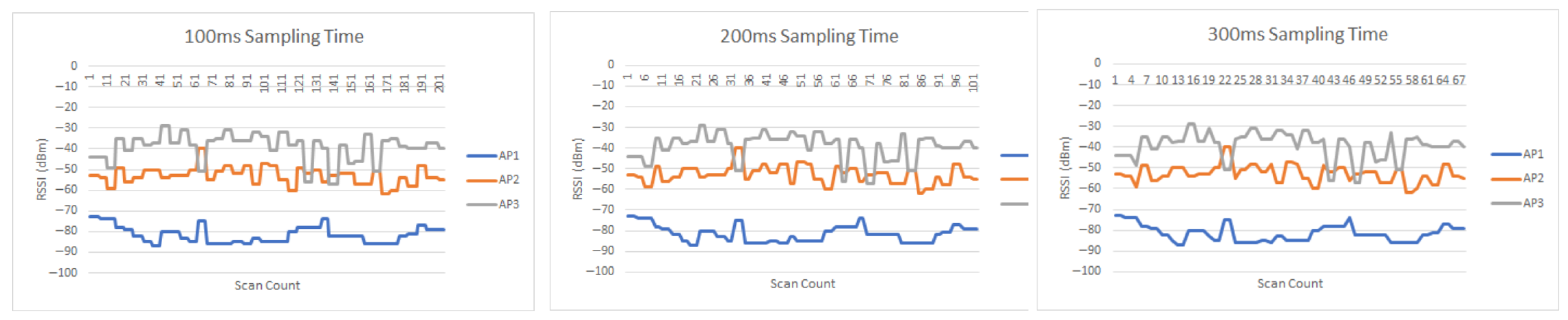
4.2. Sampling Time
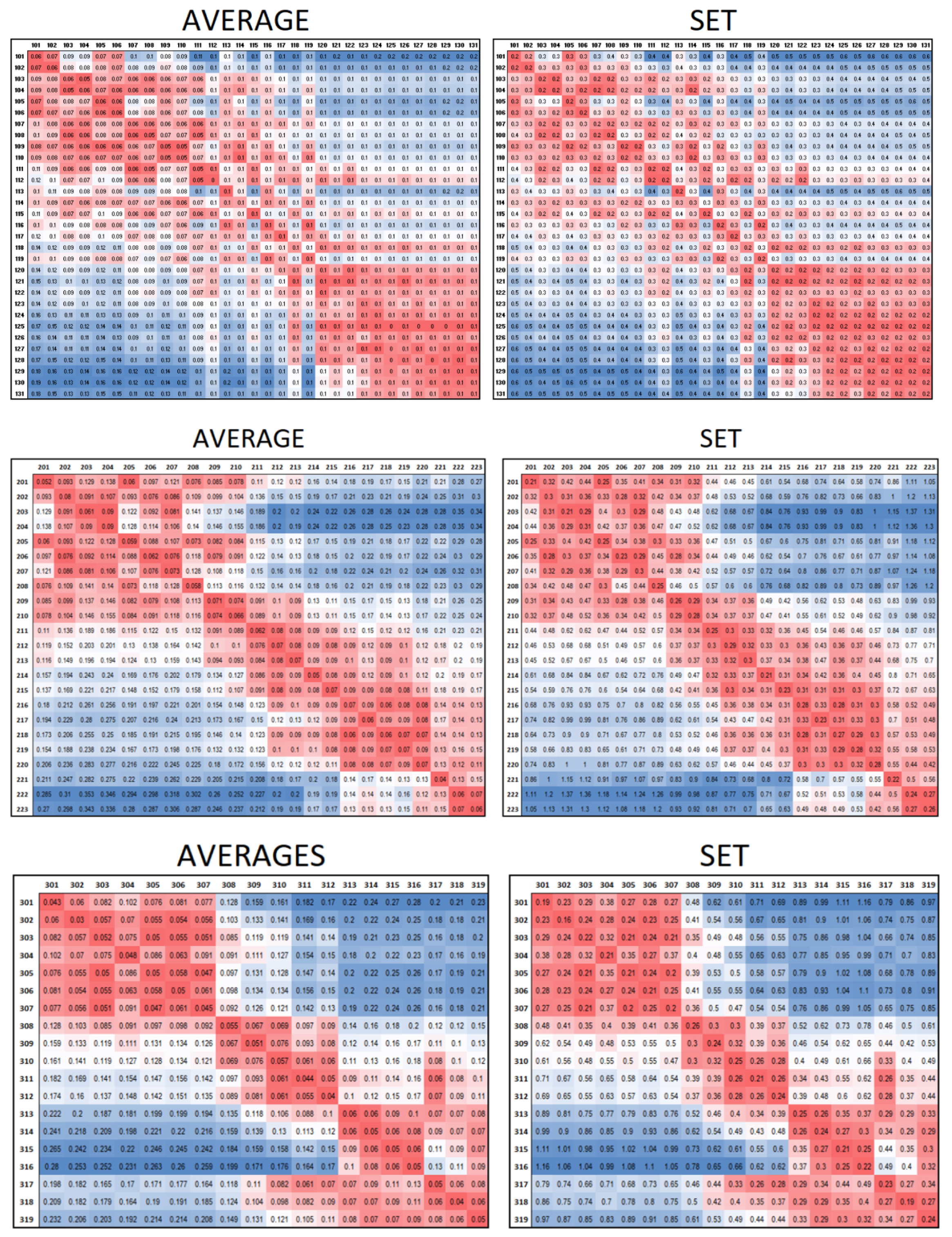
4.3. Average vs. Time-Series RSSI Readings
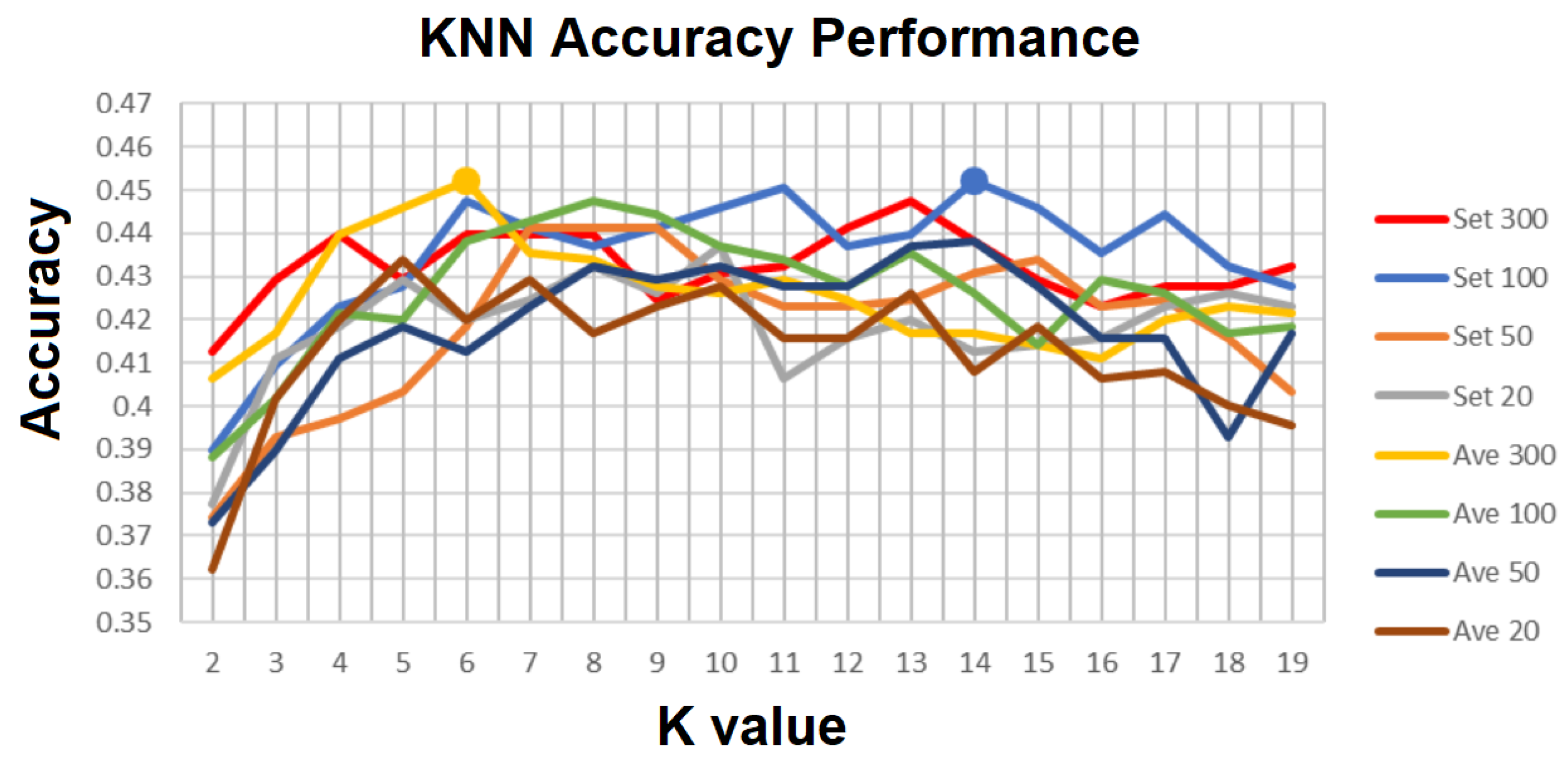
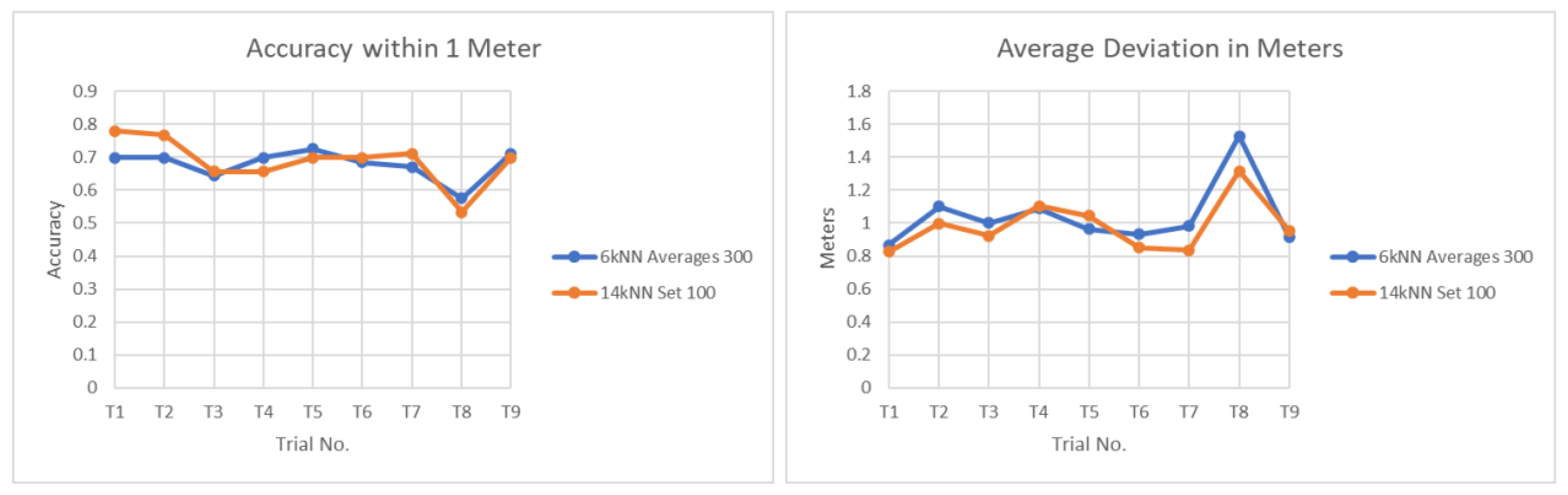
4.4. KNN Technique
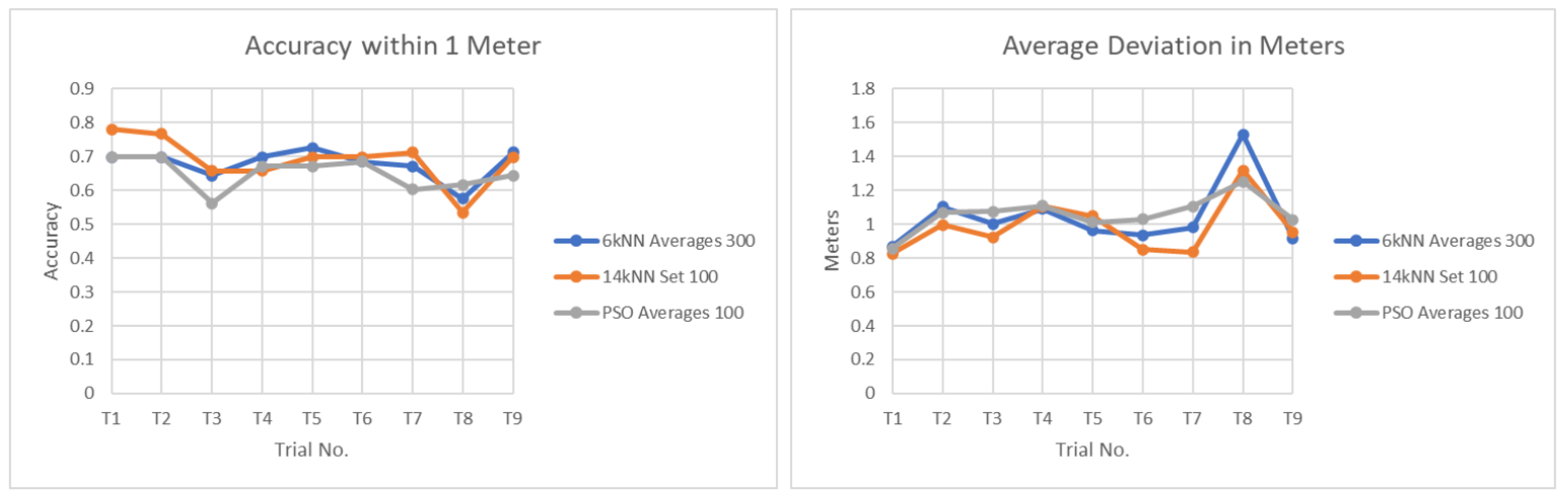
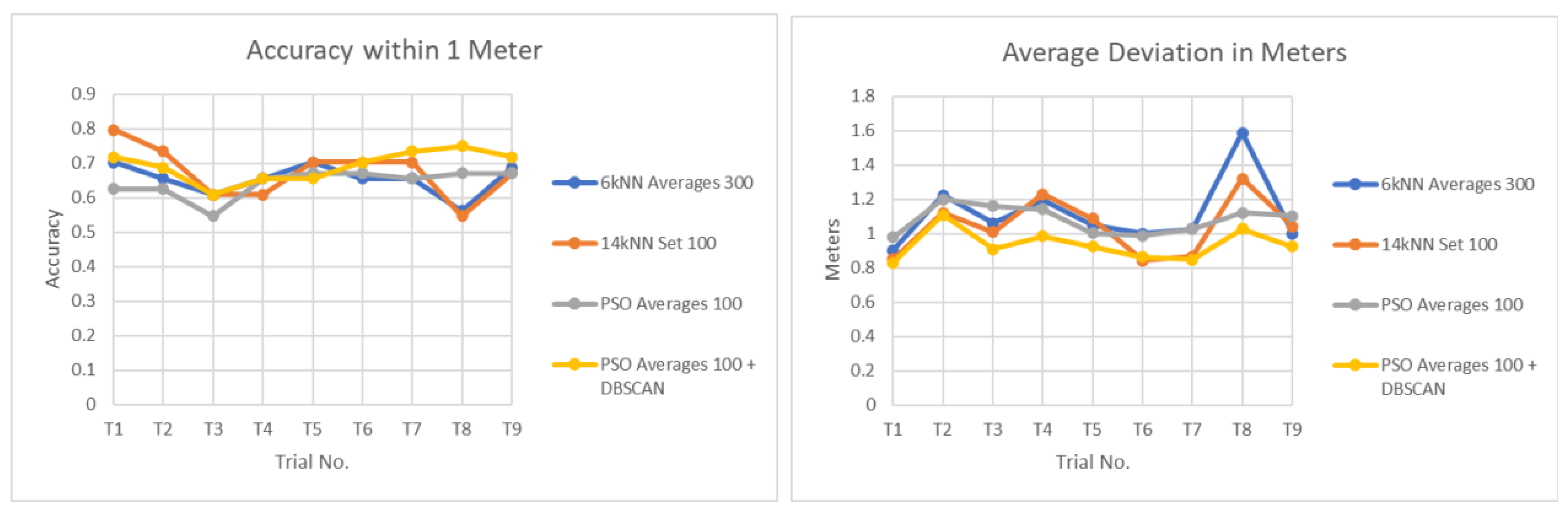
4.5. PSO + DBSCAN Technique
4.6. TRRS Technique
4.7. Summary of Discussions
- A site survey allowed us to finalize the locations where APs are to be deployed so that there was maximum coverage with the least number of deployed APs. Also, it determined how many indoor locations could be tracked. During the preliminary site assessment, we also do not suggest mounting APs onto the ceilings or any high places that will require further wall-drilling. Unlike commercial establishments, residential houses have more conventional movements because they know exactly where these hotspots are and disrupting such wireless system becomes more problematic for them. In most cases, the placement of sockets greatly determines our AP locations.
- The choice of a smartphone is important. We recommend a high-performance smart phone so that it is always responsive and does not keep crashing. Before using the Samsung phone, we utilized the Rino6 Pro phone, which is a cheaper mobile phone. The device used should also be capable of sampling RSSI readings at faster sampling rates to further obtain the environmental features. However, we were not able to test the limit of our smartphone in terms of how fast we could sample the RSSI readings.
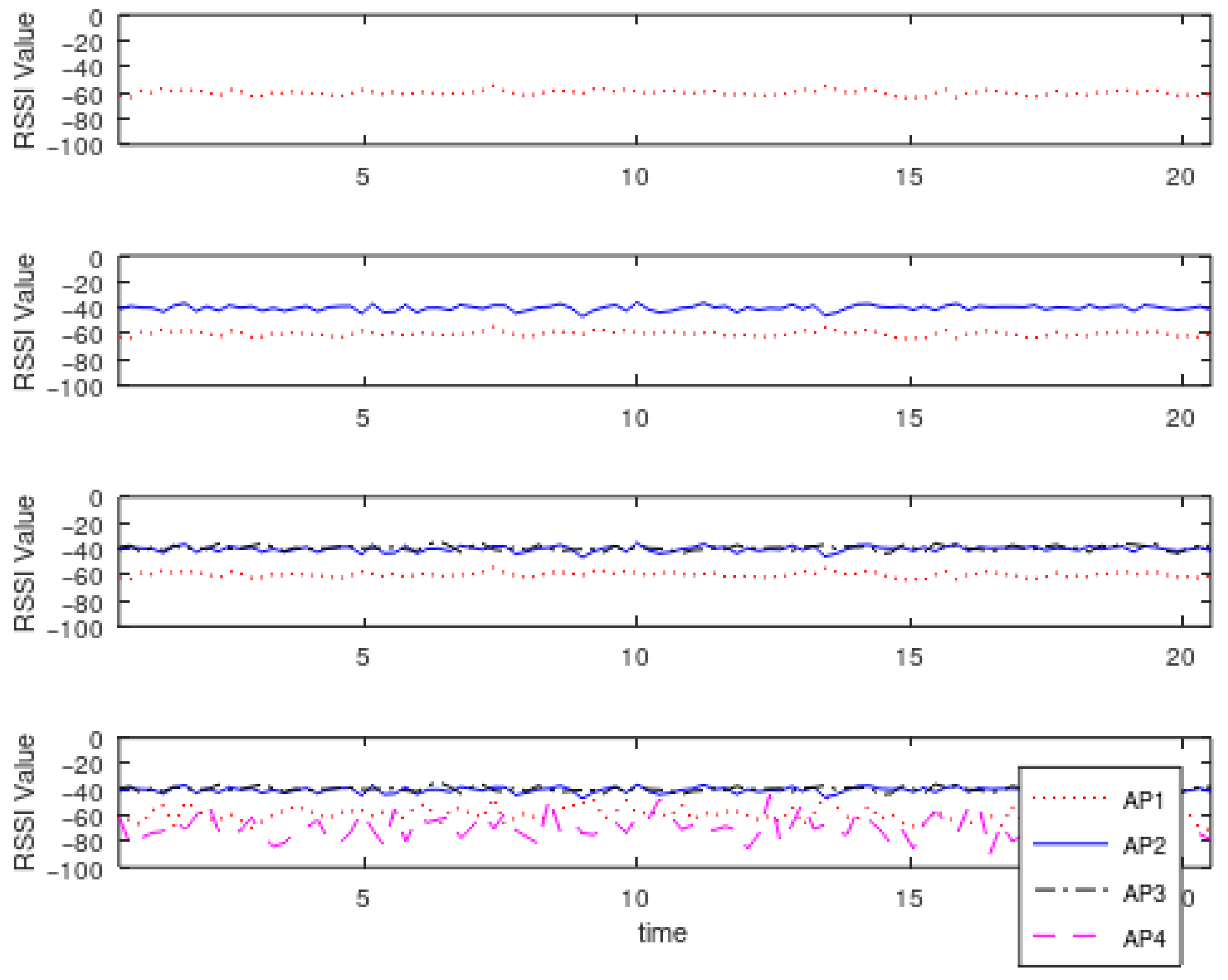
- The presence of other unwanted APs affects RSSI measurements. With our experiments, we were able to empirically limit the number of APs deployed on each floor. Figure 15 highlights what happens to the three RSSI readings when a fourth AP is added in a floor. Even though the other two readings (violet and red) were not affected, the new AP signal interfered with the gray signal. Ensure that other WiFi routers are absent. However, for houses that are adjacently built where the walls are not enough to attenuate these unwanted signals, it is advantageous to use the received signal as another source of RSSI readings. This scenario will further reduce the deployment of APs, but at the expense of uncertainty, since the control is beyond the homeowner.
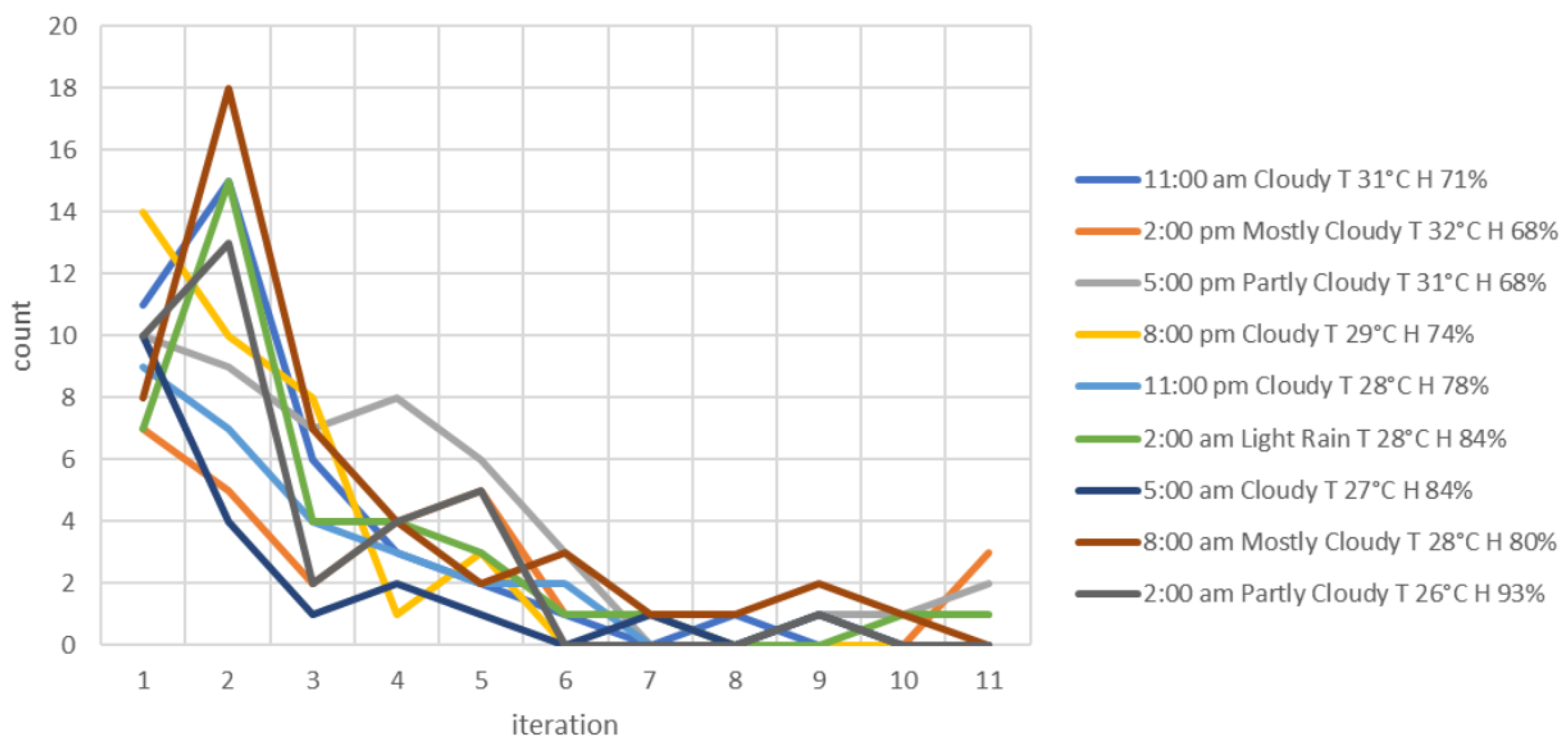
- The environment dynamics greatly affect the scene analysis utilizing fingerprints. It is suggested that these fingerprints are stored for a certain time before being updated. Our work only focuses on the movements of an average household with between five and six members. Therefore, this work excludes the study of a network experiencing heavy congestion, specifically, simultaneous connection with heavy data traffic. The sampling that we chose to capture the RSSI readings was enough for data collection and allowed for high accuracy in indoor tracking and localization.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Magsino, E.; Barrameda, J.M.C.; Puno, A.; Ong, S.; Siapco, C.; Vibal, J. Determining commercial parking vacancies employing multiple WiFiRSSI fingerprinting method. J. Sens. Actuator Netw. 2023, 12, 22. [Google Scholar] [CrossRef]
- Wichmann, J. Indoor positioning systems in hospitals: A scoping review. Digit. Health 2022, 8, 20552076221081696. [Google Scholar] [CrossRef]
- Andersson, I. Indoor Positioning Systems in Office Environments—A Study of Standards, Techniques and Implementation Processes for Indoor Maps. Examensarbete i Geografisk Informationsteknik. 2020. Available online: https://lup.lub.lu.se/luur/download?func=downloadFile&recordOId=9022576&fileOId=9022579 (accessed on 23 July 2025).
- Shi, Z.; Deng, Z.; Zheng, W.; Li, N. Campus indoor and outdoor positioning system based on GPS and Wi-Fi. In Proceedings of the 2022 IEEE 9th International Conference on Dependable Systems and Their Applications (DSA), Wulumuqi, China, 4–5 August 2022; pp. 903–908. [Google Scholar]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Xie, B.; Cui, M.; Ganesan, D.; Xiong, J. Wall matters: Rethinking the effect of wall for wireless sensing. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2024, 7, 1–22. [Google Scholar] [CrossRef]
- Magsino, E.R.; Ho, I.W.H.; Situ, Z. The effects of dynamic environment on channel frequency response-based indoor positioning. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Li, X.; Deng, Z.; Yang, F.; Zheng, X.; Zhang, L.; Zhou, Z. WiFi indoor location method based on RSSI. In Proceedings of the 2021 11th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Cracow, Poland, 22–25 September 2021; Volume 2, pp. 1036–1040. [Google Scholar]
- Wang, J.; Park, J. An enhanced indoor positioning algorithm based on fingerprint using fine-grained csi and rssi measurements of ieee 802.11 n wlan. Sensors 2021, 21, 2769. [Google Scholar] [CrossRef] [PubMed]
- Csik, D.; Odry, Á.; Sarcevic, P. Fingerprinting-based indoor positioning using data fusion of different radiocommunication-based technologies. Machines 2023, 11, 302. [Google Scholar] [CrossRef]
- Ezhumalai, B.; Song, M.; Park, K. An efficient indoor positioning method based on Wi-Fi RSS fingerprint and classification algorithm. Sensors 2021, 21, 3418. [Google Scholar] [CrossRef] [PubMed]
- Regani, S.D.; Hu, Y.; Wang, B.; Liu, K.R. Wifi-based robust indoor localization for daily activity monitoring. In Proceedings of the 1st ACM Workshop on Mobile and Wireless Sensing for Smart Healthcare, Sydney, Australia, 21 October 2022; pp. 1–6. [Google Scholar]
- Guo, J.; Ho, I.W.H. Csi-based efficient self-quarantine monitoring system using branchy convolution neural network. In Proceedings of the 2022 IEEE 8th World Forum on Internet of Things (WF-IoT), Yokohama, Japan, 26 October–11 November 2022; pp. 1–6. [Google Scholar]
- Magsino, E.R.; Sim, J.K.; Tagabuhin, R.R.; Tirados, J.J.S. Indoor localization of a multi-story residential household using multiple WiFi signals. In Proceedings of the 2021 IEEE International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT), Zallaq, Bahrain, 29–30 September 2021; pp. 365–370. [Google Scholar]
- Hosseini, K.S.; Azaddel, M.H.; Nourian, M.A.; Azirani, A.A. Improving Multi-floor WiFi-based Indoor positioning systems by Fingerprint grouping. In Proceedings of the 2021 IEEE 5th International Conference on Internet of Things and Applications (IoT), Isfahan, Iran, 19–20 May 2021; pp. 1–6. [Google Scholar]
- Hayward, S.; van Lopik, K.; Hinde, C.; West, A.A. A survey of indoor location technologies, techniques and applications in industry. Internet Things 2022, 20, 100608. [Google Scholar] [CrossRef]
- Shang, S.; Wang, L. Overview of WiFi fingerprinting-based indoor positioning. IET Commun. 2022, 16, 725–733. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A survey on indoor positioning systems for IoT-based applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Bellavista-Parent, V.; Torres-Sospedra, J.; Perez-Navarro, A. New trends in indoor positioning based on WiFi and machine learning: A systematic review. In Proceedings of the 2021 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar]
- Raj, N. Indoor RSSI prediction using machine learning for wireless networks. In Proceedings of the 2021 IEEE International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 5–9 January 2021; pp. 372–374. [Google Scholar]
- Feng, Y.; Wang, Y.; Zhao, B.; Bi, J.; Luo, Y. Machine learning-based WiFi indoor localization with FasterKAN: Optimizing communication and signal accuracy. Eng. Sci. 2024, 31, 1289. [Google Scholar] [CrossRef]
- Wang, L.; Shang, S.; Wu, Z. Research on indoor 3D positioning algorithm based on wifi fingerprint. Sensors 2022, 23, 153. [Google Scholar] [CrossRef] [PubMed]
- Ssekidde, P.; Steven Eyobu, O.; Han, D.S.; Oyana, T.J. Augmented CWT features for deep learning-based indoor localization using WiFi RSSI data. Appl. Sci. 2021, 11, 1806. [Google Scholar] [CrossRef]
- Hernández, N.; Parra, I.; Corrales, H.; Izquierdo, R.; Ballardini, A.L.; Salinas, C.; García, I. WiFiNet: WiFi-based indoor localisation using CNNs. Expert Syst. Appl. 2021, 177, 114906. [Google Scholar] [CrossRef]
- Truong-Quang, V.; Ho-Sy, T. Maximum convergence algorithm for WiFi based indoor positioning system. Int. J. Electr. Comput. Eng. 2021, 11, 4027. [Google Scholar] [CrossRef]
- Luo, M.; Zheng, J.; Sun, W.; Zhang, X. WiFi-based indoor localization using clustering and fusion fingerprint. In Proceedings of the 2021 IEEE 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 3480–3485. [Google Scholar]
- Pham-Hai, D.; Duong-Bao, N.; He, J.; Nguyen Thi, L.; Lee, S.W.; Nguyen-Huu, K. WiFi-based Positioning System with k-means Clustering and Outlier Removal: Evidence from Multiple Datasets. In Proceedings of the 12th International Symposium on Information and Communication Technology, Ho Chi Minh, Vietnam, 7–8 December 2023; pp. 980–988. [Google Scholar]
- Wang, L.; Zhang, H.; Du, C.; Wu, R.; Liu, Y. WIFI Indoor Positioning Method Based on Global Search K-means Clustering and Improved WKNN Algorithm. In Proceedings of the 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), Washington, DC, USA, 7–10 October 2024; pp. 1–7. [Google Scholar]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A survey of machine learning for indoor positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Kim, Y. An Implementation of DBSCAN. 2025. Available online: https://github.com/mtraton/moa-android/blob/master/moa/src/main/java/moa/clusterers/macro/dbscan/DBScan.java (accessed on 20 July 2025).
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.Q.; Zhang, F.; Liu, K.R. Achieving centimeter-accuracy indoor localization on WiFi platforms: A multi-antenna approach. IEEE Internet Things J. 2016, 4, 122–134. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magsino, E.; Sim, J.K.; Tagabuhin, R.R.; Tirados, J.J. Indoor Positioning and Tracking System in a Multi-Level Residential Building Using WiFi. Information 2025, 16, 633. https://doi.org/10.3390/info16080633
Magsino E, Sim JK, Tagabuhin RR, Tirados JJ. Indoor Positioning and Tracking System in a Multi-Level Residential Building Using WiFi. Information. 2025; 16(8):633. https://doi.org/10.3390/info16080633
Chicago/Turabian StyleMagsino, Elmer, Joshua Kenichi Sim, Rica Rizabel Tagabuhin, and Jan Jayson Tirados. 2025. "Indoor Positioning and Tracking System in a Multi-Level Residential Building Using WiFi" Information 16, no. 8: 633. https://doi.org/10.3390/info16080633
APA StyleMagsino, E., Sim, J. K., Tagabuhin, R. R., & Tirados, J. J. (2025). Indoor Positioning and Tracking System in a Multi-Level Residential Building Using WiFi. Information, 16(8), 633. https://doi.org/10.3390/info16080633