


On the Capacity of V2X Communication Networks to Support the Delivery of Emerging C-ITS Services: A Case Study on an Irish Motorway

 ,
,
Abstract
1. Introduction
- A discrete event network simulation model is devised and implemented for Ireland’s busiest motorway, using information on actual RSU locations and real-world vehicular traffic.
- Using this model, extensive evaluations to analyze vehicular communication performance for both ITS-G5 and C-V2X technologies, are conducted.
- This analysis covers a range of traffic conditions, from average load to peak traffic, based on real-world Day 1 C-ITS service profiles, and varying market penetration rates to thoroughly evaluate the impact on network performance.
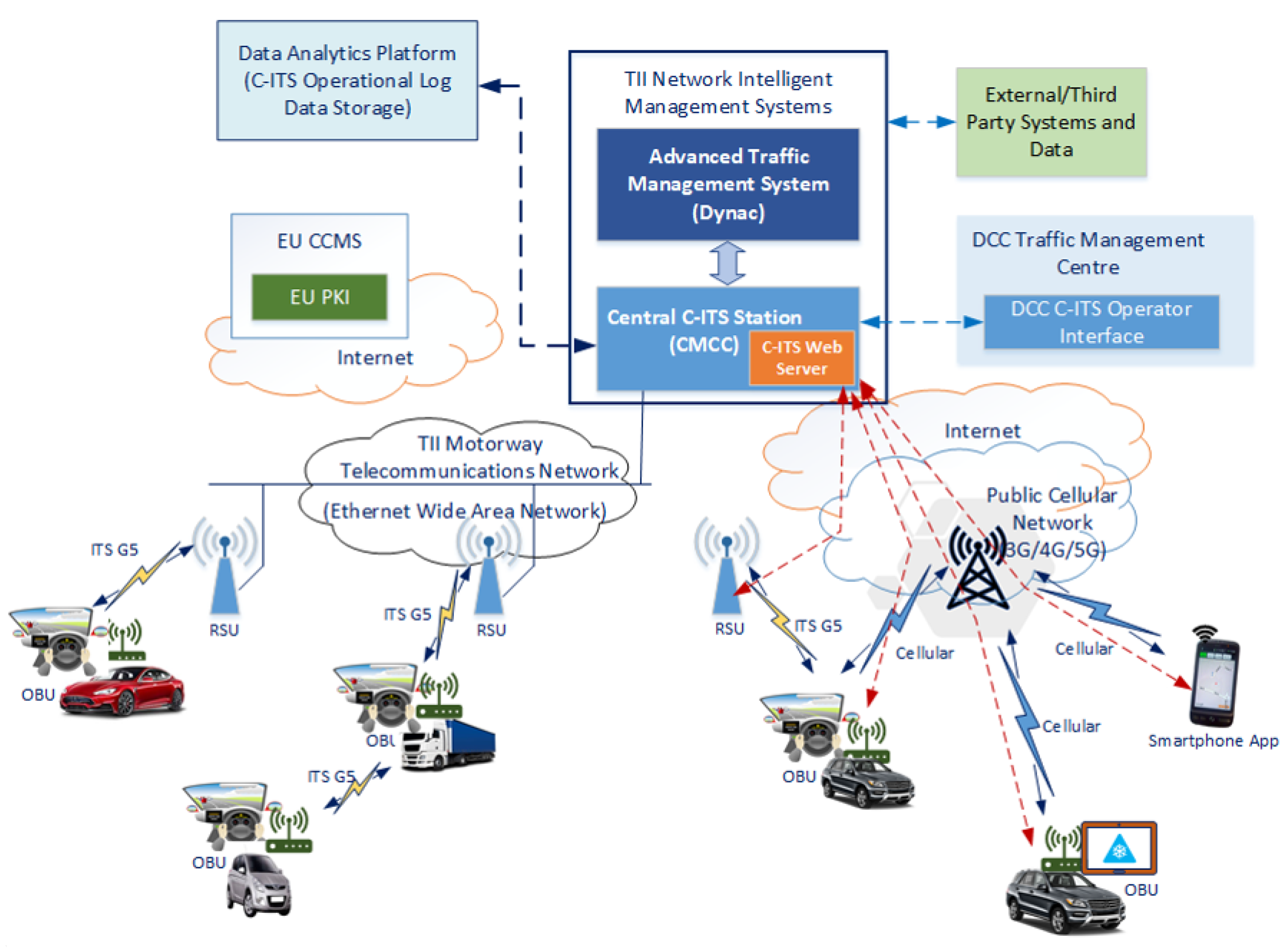
2. Overview of the Irish C-ITS Pilot and Vehicular Radio Technologies
2.1. ITS-G5 Vehicular Network
2.2. Cellular-Based Vehicular Network (C-V2X)
3. Modeling Methodology
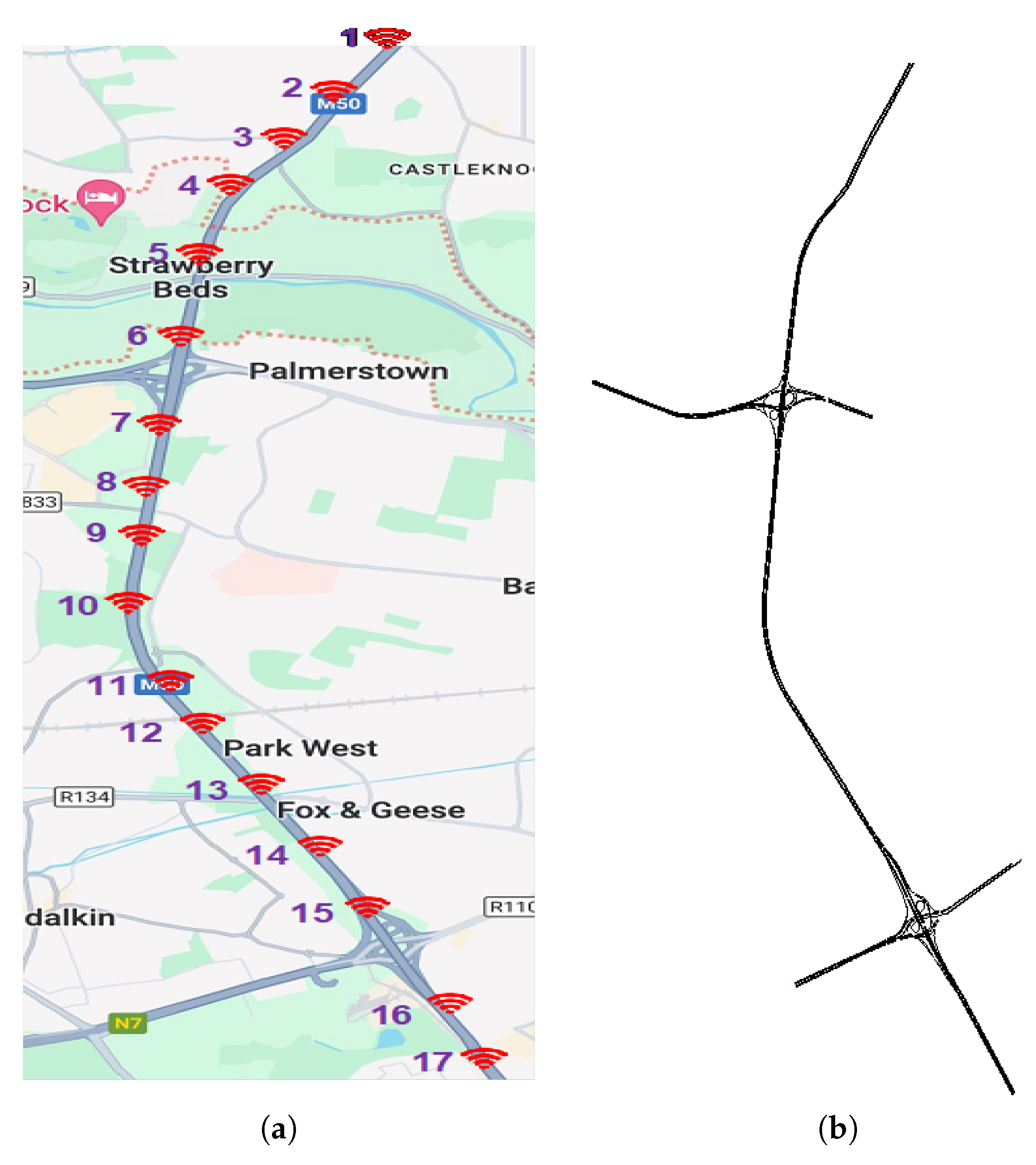
3.1. Road and Mobility Models
3.2. Data Traffic Model
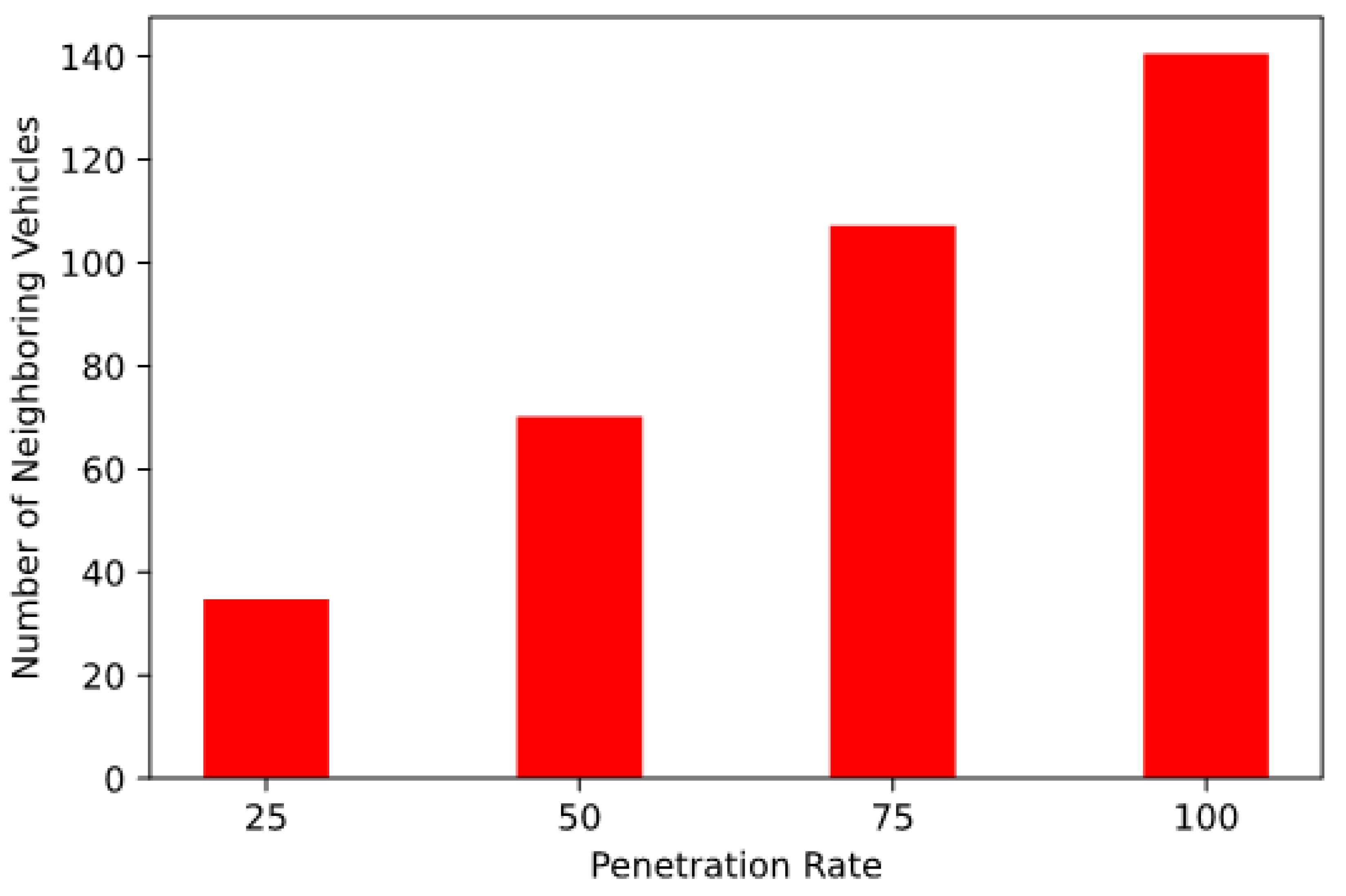
3.3. Simulation Setup
3.4. Performance Metrics
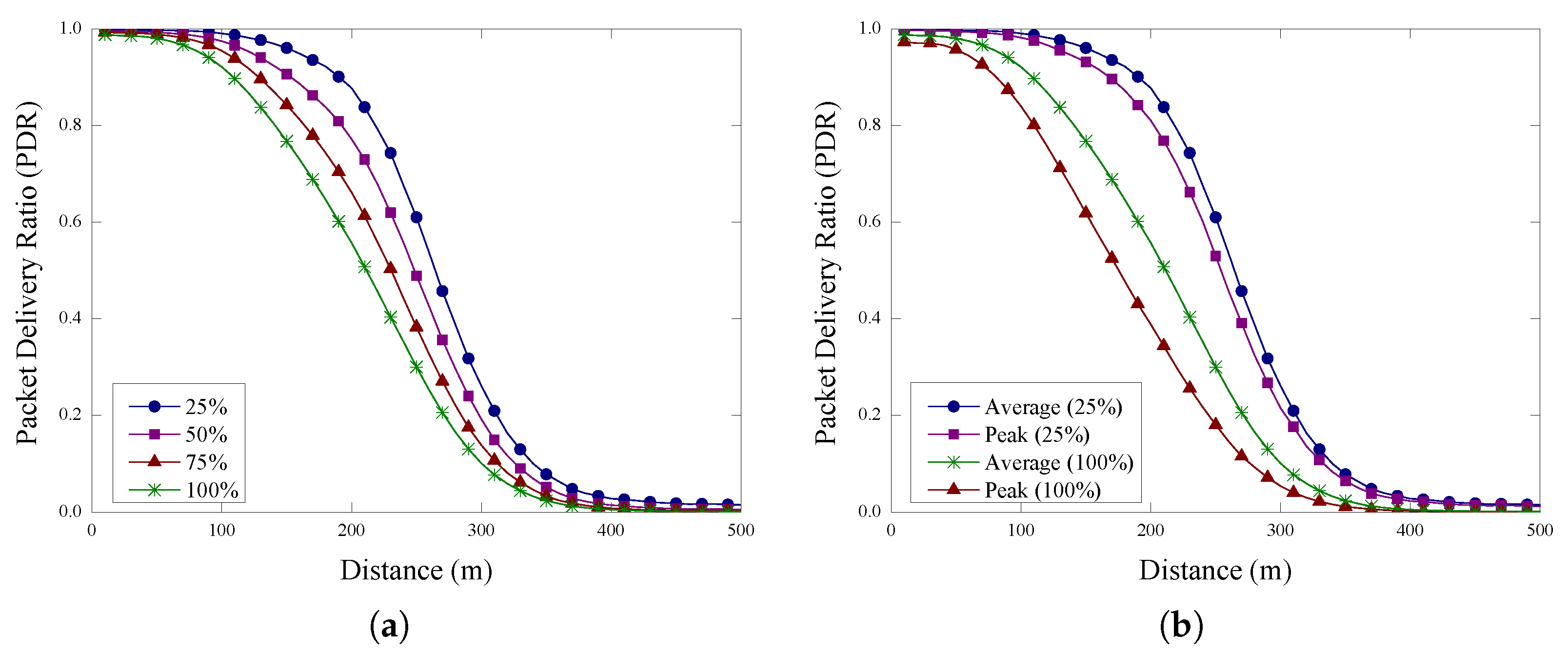
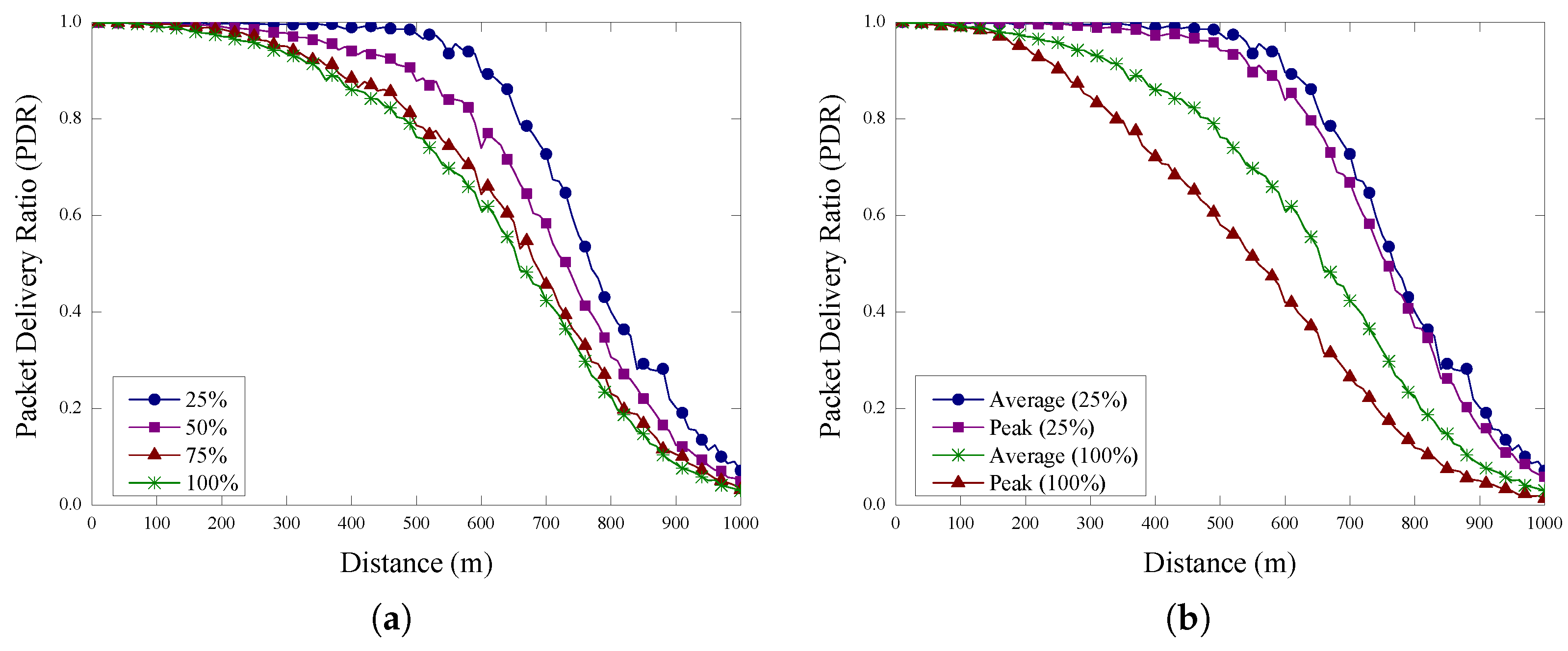
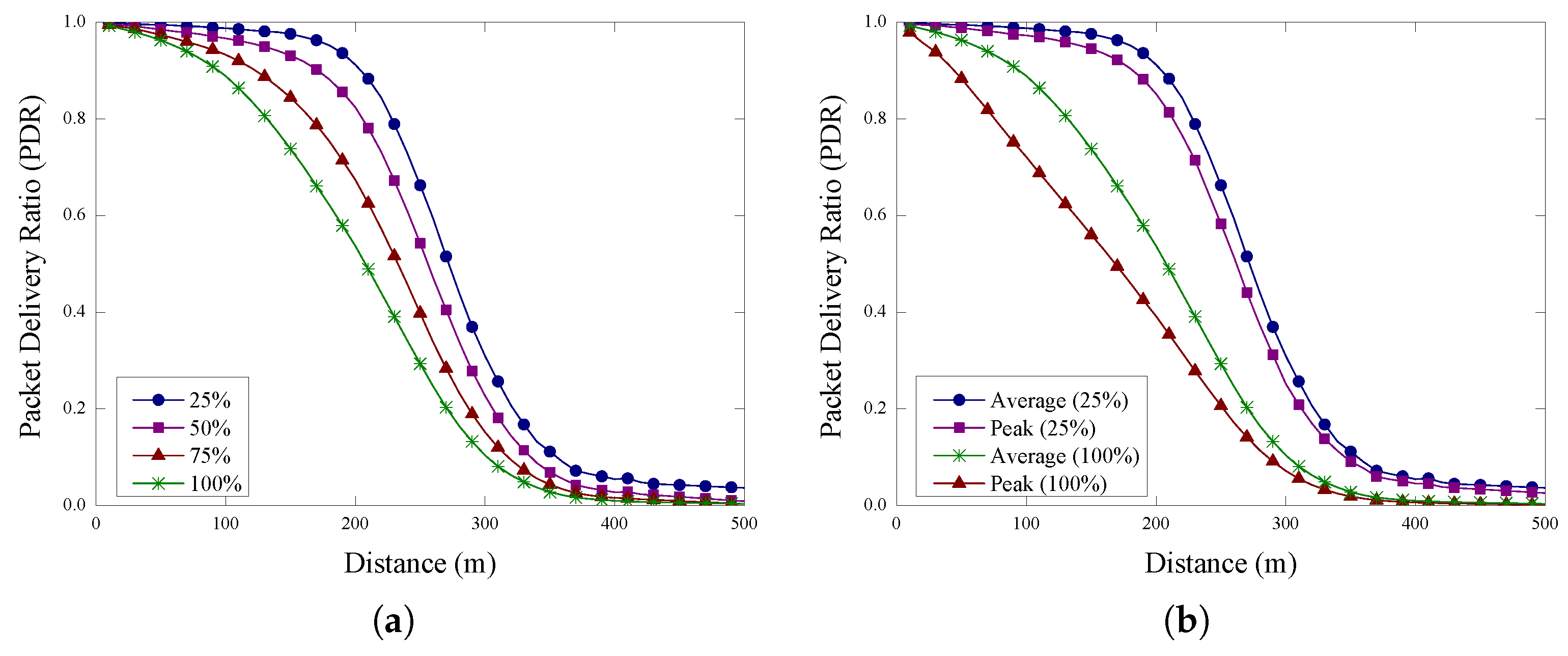
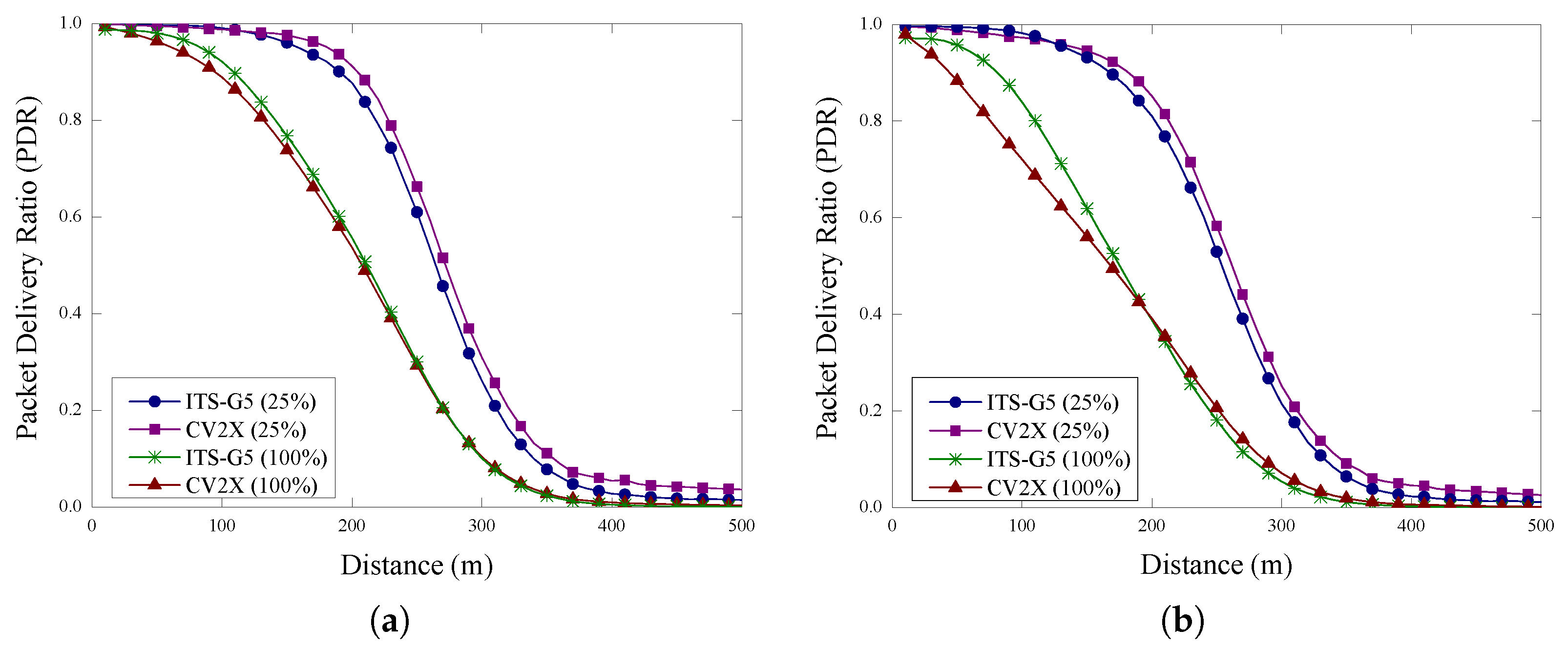
- Packet Delivery Ratio (PDR): PDR is the ratio of the number of packet successfully received by the receiver to the number of packet sent by the sender. Due to the broadcast nature of C-ITS messages, in this paper, the PDR is defined as the ratio of the number of OBUs that successfully received a data packet to the total number of OBUs within a given distance from the transmitter. This metric is crucial for evaluating the reliability of the communication link between the transmitter and receiver. A high PDR indicates that most packets are successfully delivered, which is vital for the effective functioning of V2X applications. PDR is measured with respect to varying distances between the transmitter and receiver to understand how distance impacts communication reliability.
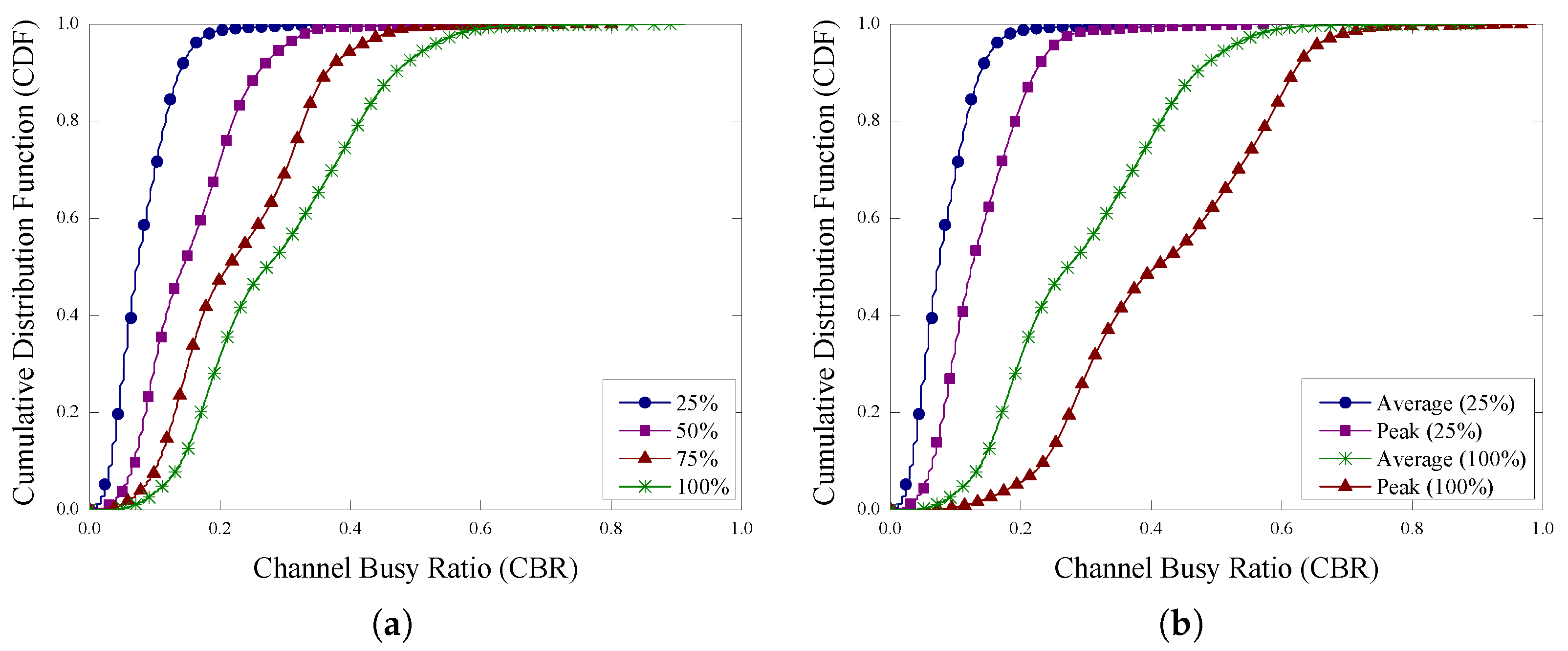
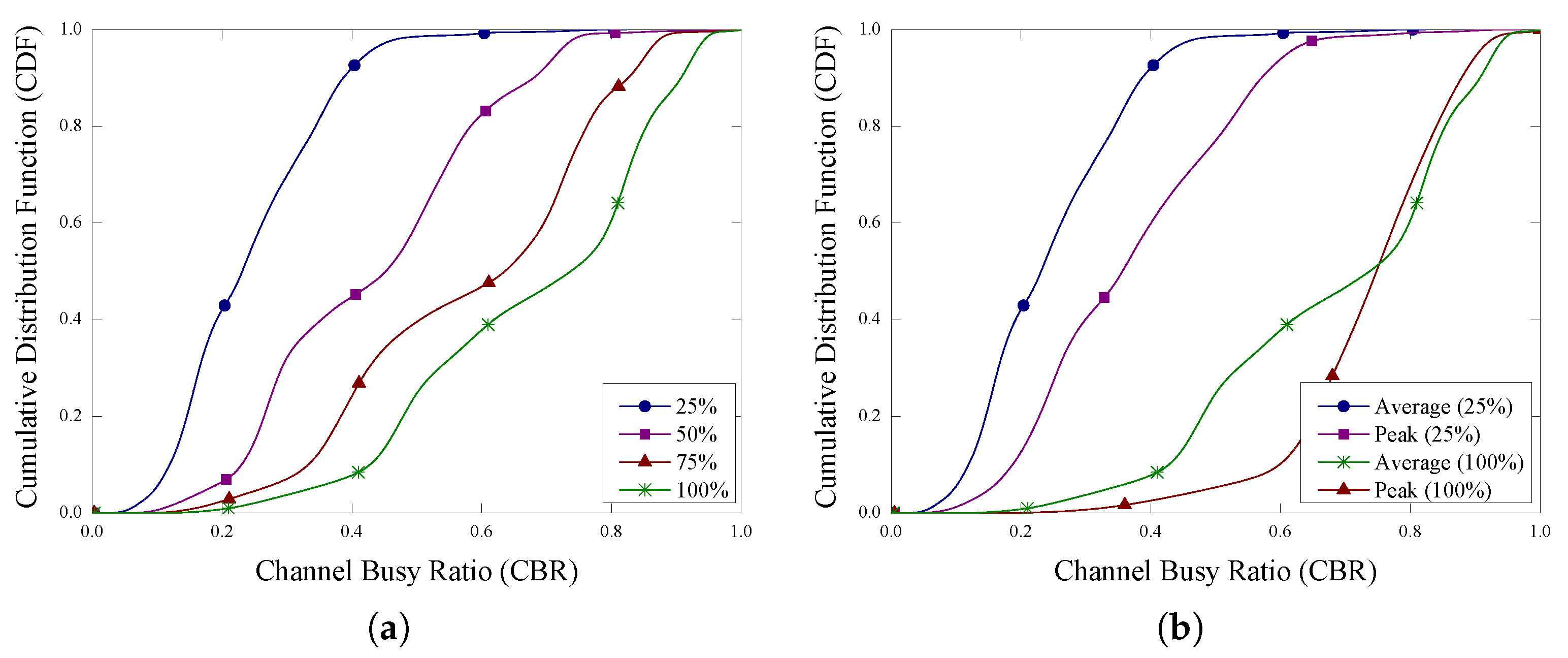
- Channel Busy Ratio (CBR): The CBR represents the proportion of time that the communication channel is sensed as busy due to ongoing transmissions. This metric provides insight into channel utilization and congestion levels within the communication network. By plotting the Cumulative Distribution Function (CDF) of CBR, we can analyze the distribution and likelihood of various CBR values occurring within the network. A higher CBR indicates a higher level of channel occupancy, which can lead to increased packet collisions and reduced communication efficiency.
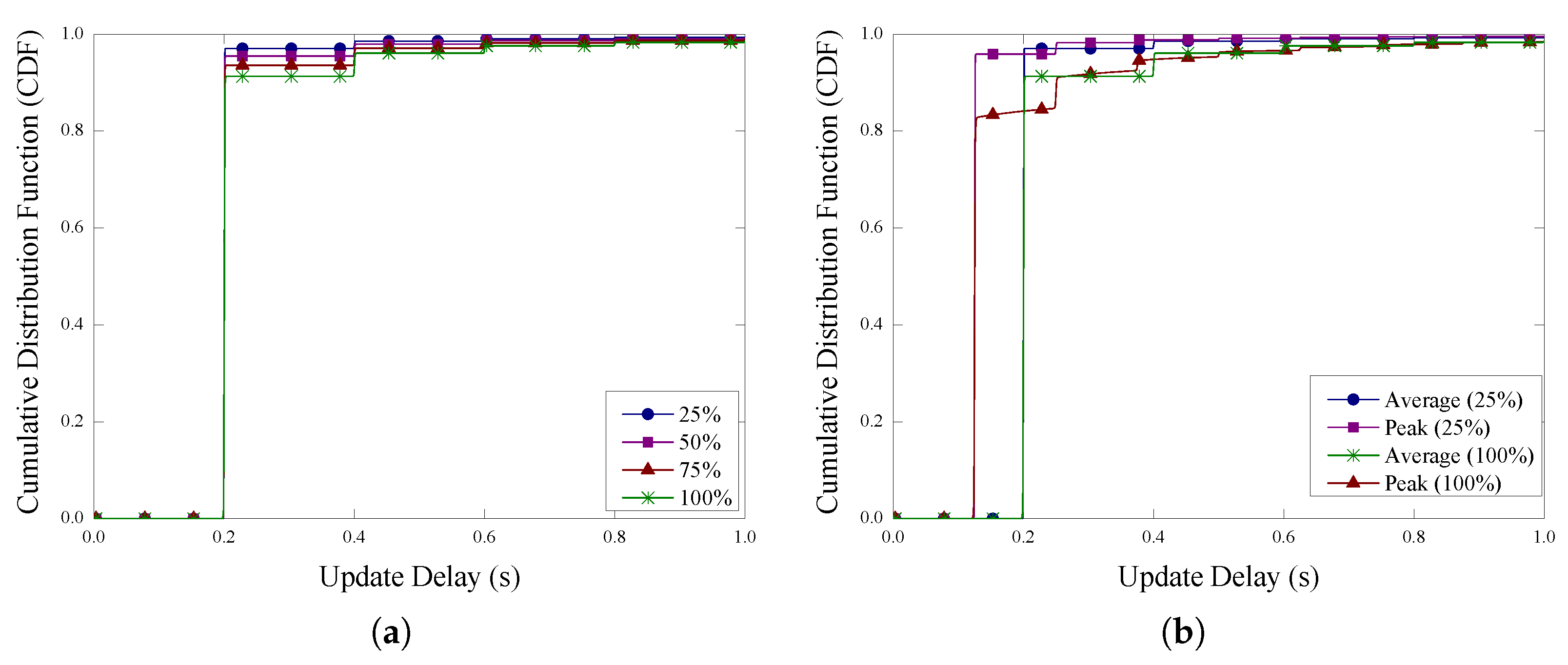
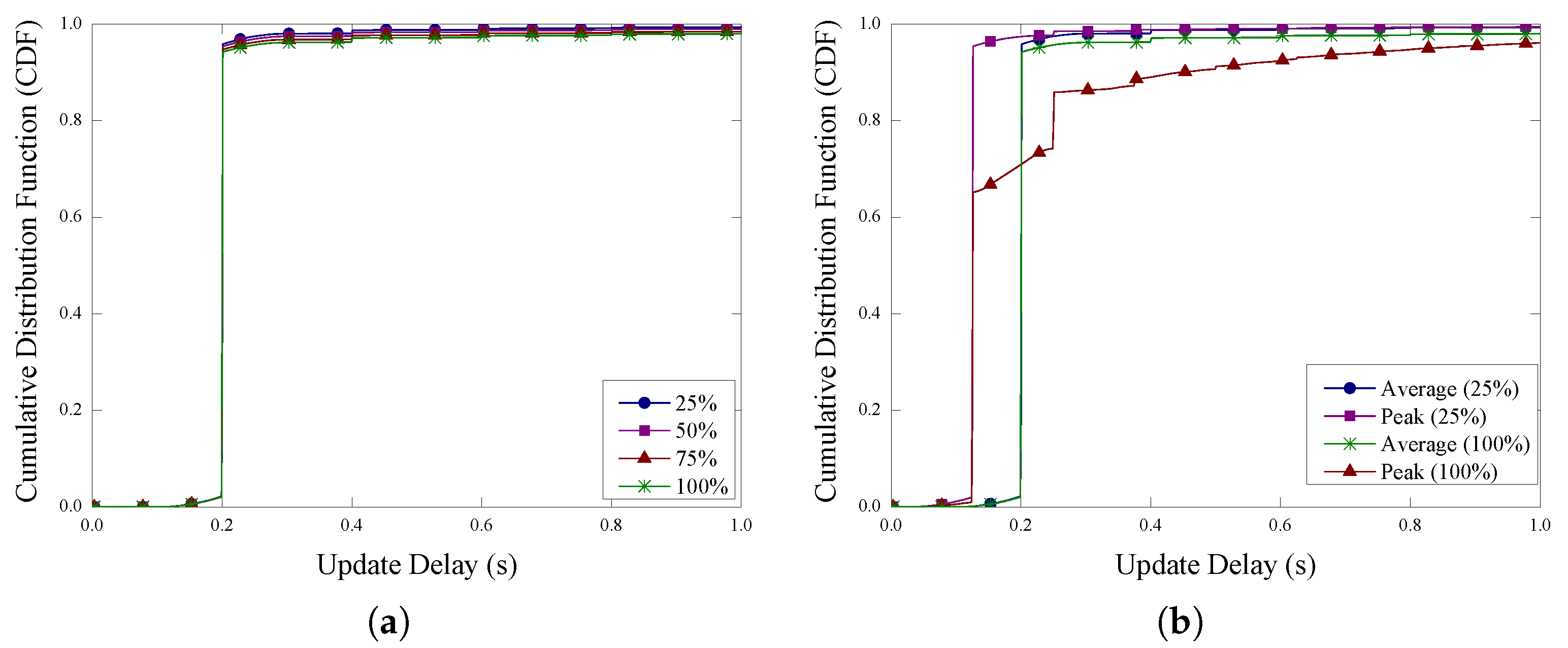
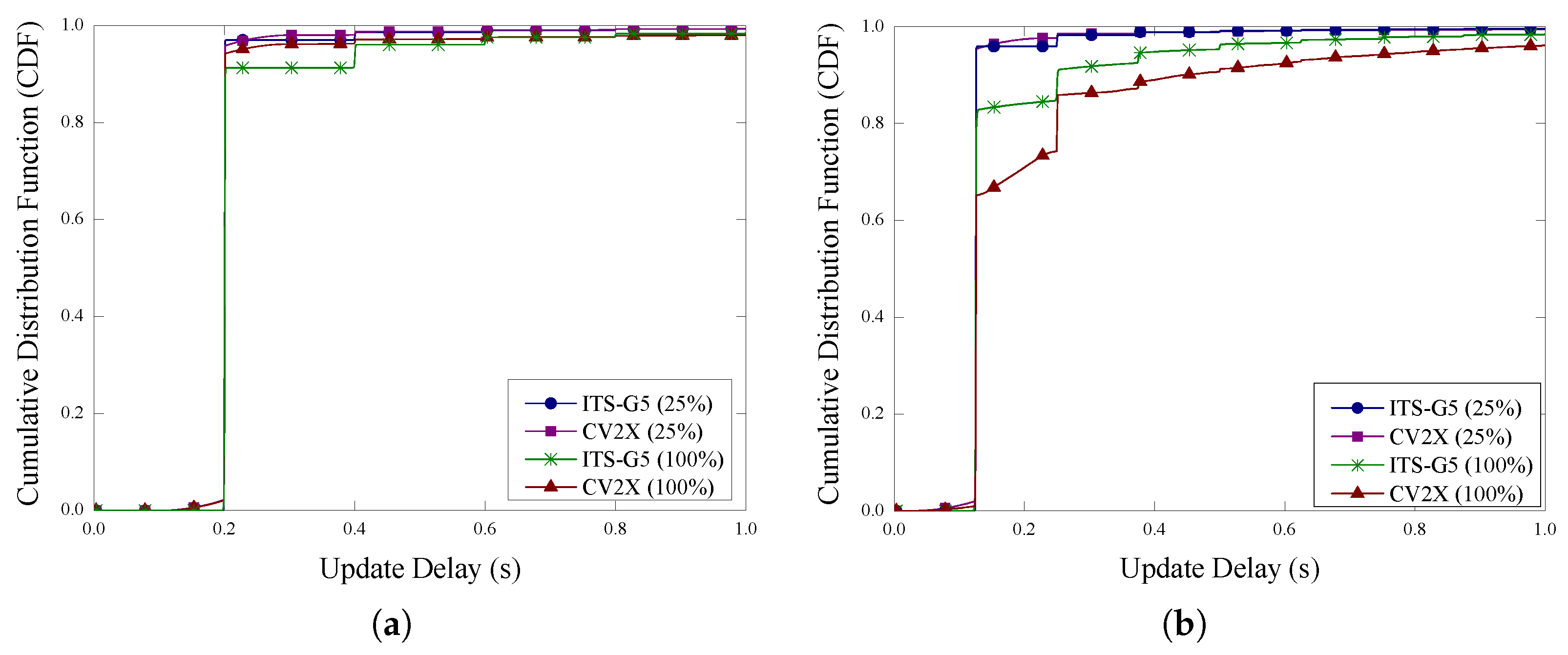
- Update Delay: The update delay, also known as the inter-packet gap, is defined as the time interval between two consecutive successfully received data packets from the same transmitter within the selected region of interest. This metric is crucial for time-sensitive V2X applications that rely on timely information for decision-making. The CDF of the update delay is plotted to understand the distribution of delay values for different scenarios. A lower update delay indicates faster message update, which is essential for traffic safety applications such as collision avoidance.
4. Results and Discussion
4.1. ITS-G5 Evaluation
4.2. C-V2X Evaluation
4.3. Performance Comparison of ITS-G5 vs. C-V2X
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Noor-A-Rahim, M.; Ali, G.M.N.; Guan, Y.L.; Ayalew, B.; Chong, P.H.J.; Pesch, D. Broadcast performance analysis and improvements of the LTE-V2V autonomous mode at road intersection. IEEE Trans. Veh. Technol. 2019, 68, 9359–9369. [Google Scholar] [CrossRef]
- World Health Organization (WHO). Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries/ (accessed on 2 December 2024).
- Moradi-Pari, E.; Tian, D.; Bahramgiri, M.; Rajab, S.; Bai, S. DSRC versus LTE-V2X: Empirical performance analysis of direct vehicular communication technologies. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4889–4903. [Google Scholar] [CrossRef]
- Balador, A.; Cinque, E.; Pratesi, M.; Valentini, F.; Bai, C.; Gómez, A.A.; Mohammadi, M. Survey on decentralized congestion control methods for vehicular communication. Veh. Commun. 2022, 33, 100394. [Google Scholar] [CrossRef]
- Seo, H.; Lee, K.D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE evolution for vehicle-to-everything services. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.M.N.; Nguyen, H.; Guan, Y.L. Performance analysis of IEEE 802.11p safety message broadcast with and without relaying at road intersection. IEEE Access 2018, 6, 23786–23799. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Nguyen, H.; Xiaoli, X.; Noor-A-Rahim, M.; Guan, Y.L.; Pesch, D.; Li, H.; Filippi, A. Impact of big vehicle shadowing on vehicle-to-vehicle communications. IEEE Trans. Veh. Technol. 2020, 69, 6902–6915. [Google Scholar] [CrossRef]
- Ansari, K. Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band. IET Intell. Transp. Syst. 2021, 15, 213–224. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11p and LTE-V2X: An evaluation with periodic and aperiodic messages of constant and variable size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Karthikeyan, K.; Parthipan, V.; Niranjana, M.I.; Prithvi, D.; Franklin, N.R.; Kaviarasu, N. Enhancing Vehicular Communication Efficiency Through DSRC and LTE-V2X Integration. In Proceedings of the 2024 International Conference on Science Technology Engineering and Management (ICSTEM), Coimbatore, India, 26–27 April 2024; IEEE: New York, NY, USA, 2024; pp. 1–6. [Google Scholar]
- Bazzi, A.; Bartoletti, S.; Zanella, A.; Martinez, V. Performance analysis of IEEE 802.11p preamble insertion in C-V2X sidelink signals for co-channel coexistence. Veh. Commun. 2024, 45, 100710. [Google Scholar] [CrossRef]
- Navaratnarajah, S.; Navaratnam, P.; Laoide-Kemp, D. On the Capacity of Roadside Communication Networks for Supporting the Delivery of Emerging C-ITS Services. In Proceedings of the Transport Research Arena (TRA) Conference, Dublin, Ireland, 15–18 April 2024; pp. 1–6. [Google Scholar]
- 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Security Aspect for LTE Support of Vehicle-to-Everything (V2X) Services (Release 14). 2017. Available online: https://www.etsi.org/deliver/etsi_ts/133100_133199/133185/14.01.00_60/ts_133185v140100p.pdf (accessed on 1 June 2025).
- Ireland, T.I. Ireland’s National Cooperative ITS (C-ITS) Pilot. Available online: https://www.tii.ie/en/technical-services/research/c-its/ (accessed on 2 December 2024).
- V2X-SUMO Documentation. Available online: https://sumo.dlr.de/docs/Topics/V2X.html (accessed on 2 December 2024).
- Transport Infrastructure Ireland-Data Portal. Available online: https://data.tii.ie/ (accessed on 2 December 2024).
- Guériau, M.; Dusparic, I. Quantifying the impact of connected and autonomous vehicles on traffic efficiency and safety in mixed traffic. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: New York, NY, USA, 2020; pp. 1–8. [Google Scholar]
- Todisco, V.; Bartoletti, S.; Campolo, C.; Molinaro, A.; Berthet, A.O.; Bazzi, A. Performance analysis of sidelink 5G-V2X mode 2 through an open-source simulator. IEEE Access 2021, 9, 145648–145661. [Google Scholar] [CrossRef]
- WiLabV2XSim Source Code. Available online: https://github.com/V2Xgithub/WiLabV2Xsim (accessed on 2 December 2024).
- WINNER II Channel Models. IST-4-027756 WINNER II, D. 1. 1. 2 V1. 2 2007. Available online: https://www.researchgate.net/publication/261467821_CP5-026_WINNER_D53_v10_WINNER_Final_Channel_Models (accessed on 28 May 2021).
- Mangel, T.; Klemp, O.; Hartenstein, H. 5.9 GHz inter-vehicle communication at intersections: A validated non-line-of-sight path-loss and fading model. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 182. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | LTE-V (C-V2X, PC5 Interface) | ITS-G5 (IEEE 802.11p) |
|---|---|---|
| Standardization | 3GPP Rel-14 | IEEE 802.11p + ETSI ITS-G5/WAVE (US) |
| PHY Layer | SC-FDMA | OFDM (modified 802.11a) |
| MAC Layer | Semi-persistent scheduling (SPS); centralized (Mode 3) or autonomous (Mode 4) | CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance) |
| Channel Access Modes | Mode 3: eNodeB-scheduled; Mode 4: autonomous | Distributed only |
| Modulation Schemes | QPSK, 16QAM | BPSK, QPSK, 16QAM, 64QAM |
| Subcarrier Spacing | 15 kHz | 156.25 kHz (in 10 MHz channels, 64 subcarriers) |
| Frame Duration | 10 ms (1 ms subframes) | Variable (based on packet size and contention) |
| Synchronization | Synchronized (GNSS or cellular timing) | Asynchronous |
| Channel Coding | Turbo coding | Convolutional coding |
| MIMO Support | Limited/Optional in early releases | Not supported |
| Interference Handling | Better (scheduling, SINR-based adaptation) | Weaker (hidden node problem, contention issues) |
| Service Category | C-ITS Applications | Message | TX Modes | Assumed |
|---|---|---|---|---|
| In Vehicle Information (IVI) | In vehicle Dynamic Speed Limit | IVIM | I2V | 0.5 |
| Other Signage Information | IVIM | I2V | 0.5 | |
| Embedded VMS ‘Free Text’ | IVIM | I2V | 0.5 | |
| Hazardous Location Notification (HLN) | Stationary Vehicle | DENM | I2V | 0.02 |
| Slow Vehicle | DENM | I2V | 0.02 | |
| Weather Condition Warning | DENM | I2V | 0.02 | |
| Traffic Jam Ahead Warning | DENM | I2V | 0.02 | |
| Emergency Electronic Brake Light | DENM | V2I, V2V | 0.02 | |
| Emergency Vehicle Approaching | IVIM | V2I, V2V | 0.02 | |
| Road Works Warning (RWW) | Lane Closure Waring | DENM | I2V | 0.05 |
| Road Closure Warning | DENM | I2V | 0.05 | |
| Mobile Road Works Warning | DENM | I2V | 0.05 | |
| Point of Interest (POI) | Electric Charging Stations Info | EVCSN | I2V | 0.03 |
| Probe vehicle Data (PVD) | Vehicle Data Collection | CAM | V2I, V2V | 1 |
| Parameter | Car | Truck |
|---|---|---|
| Car-Following Model | Krauss | |
| Speed Deviation (%) | 0.1 | 0.1 |
| Time Headway (s) | 1.2 | 1.5 |
| Min gap (m) | 2.5 | 2.5 |
| Max accel. (m/s2) | 7.5 | 4 |
| Deceleration (m/s2) | 9 | 7 |
| Imperfection | 0.5 | 0.5 |
| Lane-Changing Model | SUMO lane-changing model | |
| Cooperation | 0.5 | 0.5 |
| Anticipation | 0.5 | 0.5 |
| Parameter | Value(s) | Unit |
|---|---|---|
| Frequency Band | 5.9 | GHz |
| Bandwidth | 10 | MHz |
| Bit Rate | 6 | Mbps |
| Transmission Power | 23 | dBm |
| Antenna Gain | 3 | dBi |
| OBU Height | 1.5 | m |
| RSU Height | 8 | m |
| Pathloss model | Winner + B1 | |
| Small-scale fading | 3 | dB |
| Simulation Time | 90 | s |
| Penetration Rates | 25, 50, 75, 100 | % |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hossan, A.; Noor-a-Rahim, M.; Sreenan, C.J.; Navaratnam, P.; Navaratnarajah, S.; Allen, T.; Laoide-Kemp, D.; O’Driscoll, A. On the Capacity of V2X Communication Networks to Support the Delivery of Emerging C-ITS Services: A Case Study on an Irish Motorway. Information 2025, 16, 563. https://doi.org/10.3390/info16070563
Hossan A, Noor-a-Rahim M, Sreenan CJ, Navaratnam P, Navaratnarajah S, Allen T, Laoide-Kemp D, O’Driscoll A. On the Capacity of V2X Communication Networks to Support the Delivery of Emerging C-ITS Services: A Case Study on an Irish Motorway. Information. 2025; 16(7):563. https://doi.org/10.3390/info16070563
Chicago/Turabian StyleHossan, Arif, Md Noor-a-Rahim, Cormac J. Sreenan, Piraba Navaratnam, Shobanraj Navaratnarajah, Thomas Allen, David Laoide-Kemp, and Aisling O’Driscoll. 2025. "On the Capacity of V2X Communication Networks to Support the Delivery of Emerging C-ITS Services: A Case Study on an Irish Motorway" Information 16, no. 7: 563. https://doi.org/10.3390/info16070563
APA StyleHossan, A., Noor-a-Rahim, M., Sreenan, C. J., Navaratnam, P., Navaratnarajah, S., Allen, T., Laoide-Kemp, D., & O’Driscoll, A. (2025). On the Capacity of V2X Communication Networks to Support the Delivery of Emerging C-ITS Services: A Case Study on an Irish Motorway. Information, 16(7), 563. https://doi.org/10.3390/info16070563