


Implementation of LoRa TDMA-Based Mobile Cell Broadcast Protocol for Vehicular Networks



Abstract
1. Introduction
- these services are implemented in radio frequency bands that are highly populated today, especially in urban areas; as a result, the interference can degrade connectivity;
- these services are implemented using third-party infrastructure and can be down for maintenance or can became unavailable by a cyberattack or an accident.
- Besides GPRS/LTE and WiFi, there should be a non-third-party, probably lightweight, local solution for vehicular network connectivity;
- Such a solution for TMS network connectivity should be reliable, safe, secure, and inexpensive in order to ensure accessible RSU [13] which in turn would provide all the benefits of planned ITS implementation.
- Section 2 is devoted to the background theory and technologies used in the development reviewed in related studies;
- Section 3 details the pre-implementation experiment which determined the selection of the MCBP hardware;
- Section 4 describes MCBP implementation, test setup and experimental results;
- Section 5 is devoted to the discussion of MCBP’s current design and performance;
- Section 6 contains conclusions.
2. Preliminaries
2.1. Related Work
2.2. Vehicular Networks
- Data exchange channel capacity;
- Data refresh frequency (determined by maximal network latency);
- Size of data shared by each vehicle.
2.3. LoRa Modulation
- Exceptional sensitivity due to increased transmitted signal energy ensuring or long range or low bit error rate for short distances according to theory;
- Some level of orthogonality with existing modulation schemes and LoRa modulated signals with a different spreading factor [22] ensuring higher level of immunity to in-band electromagnetic interference than traditional modulation schemes;
- Adjustable coding redundancy: 4/5–1/2;
- Adjustable modulation parameters (spreading factor, bandwidth).
- Security due to possible end-to-end AES128 encryption.
2.4. TDMA
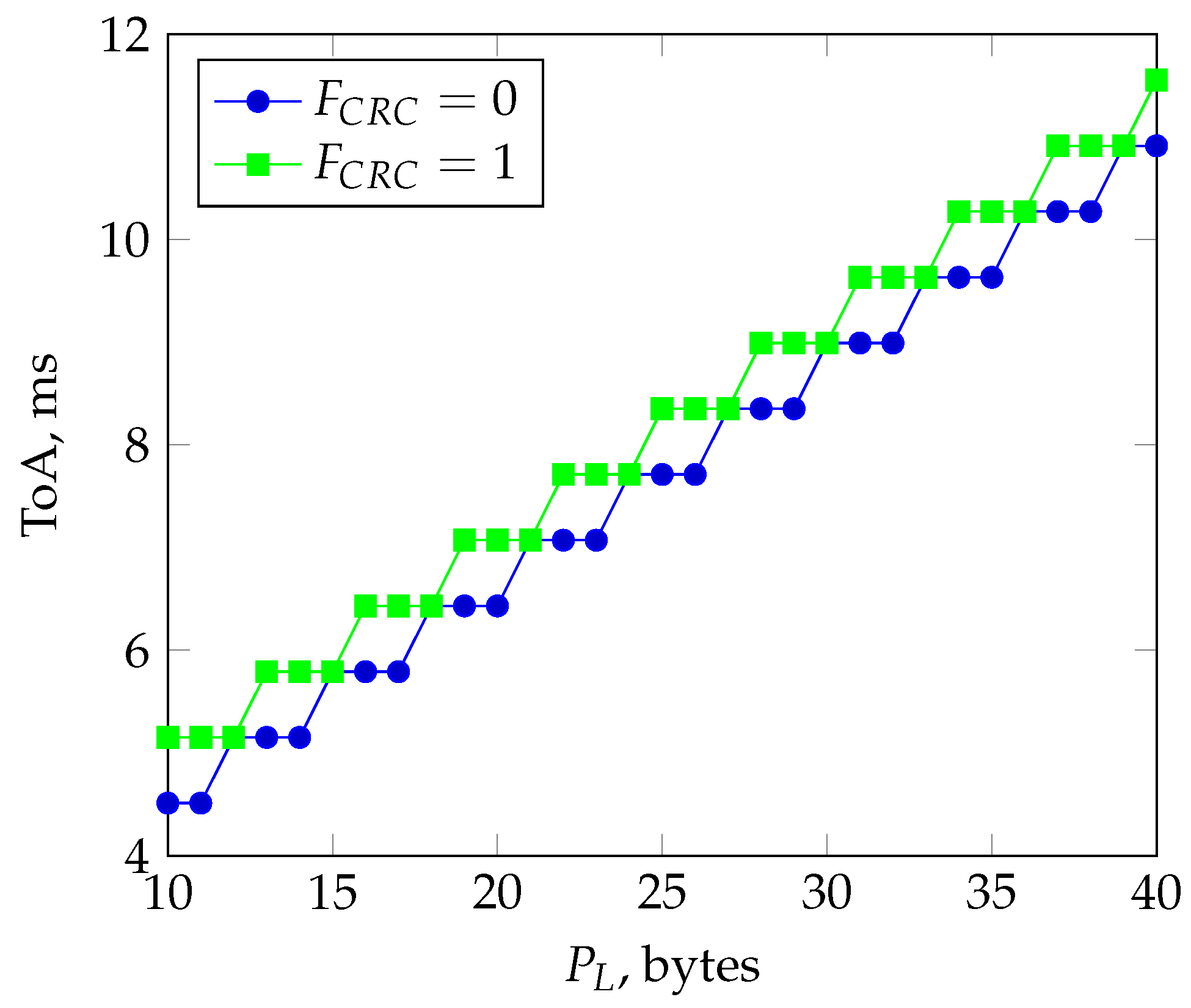
- the number of LoRa packet payload bytes (1 to 255) ;
- the Spreading Factor (6 to 12) ;
- the Implicit Header flag : when the header is enabled, when no header is present;
- the Data-rate optimization Enabled flag : when so-called Low Data Rate Optimization is enabled, otherwise;
- the Coding Rate : 1 corresponds to coding “4/5”, 4—to coding “4/8”;
- the CRC flag : 1 corresponds to CRC enabled.
3. Pre-Implementation Performance Evaluation
3.1. Architectural Design Considerations
- Directly to the host micro-controller unit (MCU) or processor system. In this case, if the host is busy processing real-time data of the vehicle, than there is a risk for implementation of the real-time radio chip management since radio chip demands real-time reaction from the host;
- Via dedicated radio chip controller connected to the host system. In this case, the host can be busy and that does not degrade real-time radio chip operation since its primitive events (like setting the radio chip parameters, building packets for transmission, and parsing incoming ones) serves the dedicated radio-chip controller. As a result, the local (relatively to the RSU) dynamic network has better chances to stay organized and connected.
- On to the host MCU;
- On to the dedicated radio chip controller.
3.2. Setup and Methodology
- The host controller: iMX6 TinyRex Base Board Lite (https://www.voipac.com/#iMX6-TBL-00000000 (accessed on 23 March 2025)). with iMX6 TinyRex Module Lite (https://www.voipac.com/#iMX6-TRM-43101311 (accessed on 23 March 2025)). that for the case contains
- NXP i.MX6 ARM® Cortex® A9 Solo CPU, 1GHz;
- 256MB DDR3-800 (400 MHz) SDRAM;
- All necessary interfaces.
- The radio module RN2483A containing (http://ww1.microchip.com/downloads/en/DeviceDoc/40001864B.pdf (accessed on 23 March 2025)).
- Dedicated radio controller PIC18LF46K22;
- Radio chip SX1276.
| Output power: | −3 dBm (ISM 868 MHz band in combination with low transmitted power was used for all indoor and outdoor tests); |
| Modulation: | LoRa; |
| Spreading factor: | SF6; |
| Header mode: | implicit header; |
| Frequency: | 868.5 MHz; |
| Channel hoping: | off; |
| Bandwidth: | 500 kHz; |
| Coding rate: | 4/5; |
| CRC: | off; |
| IQ inversion: | off; |
| Preamble length: | 12.25 (including 4.25 added by radio chip); |
| Payload: | 18 bytes; |
| Serial port baud rate: | 115,200 bps. |
3.3. Performance Analysis
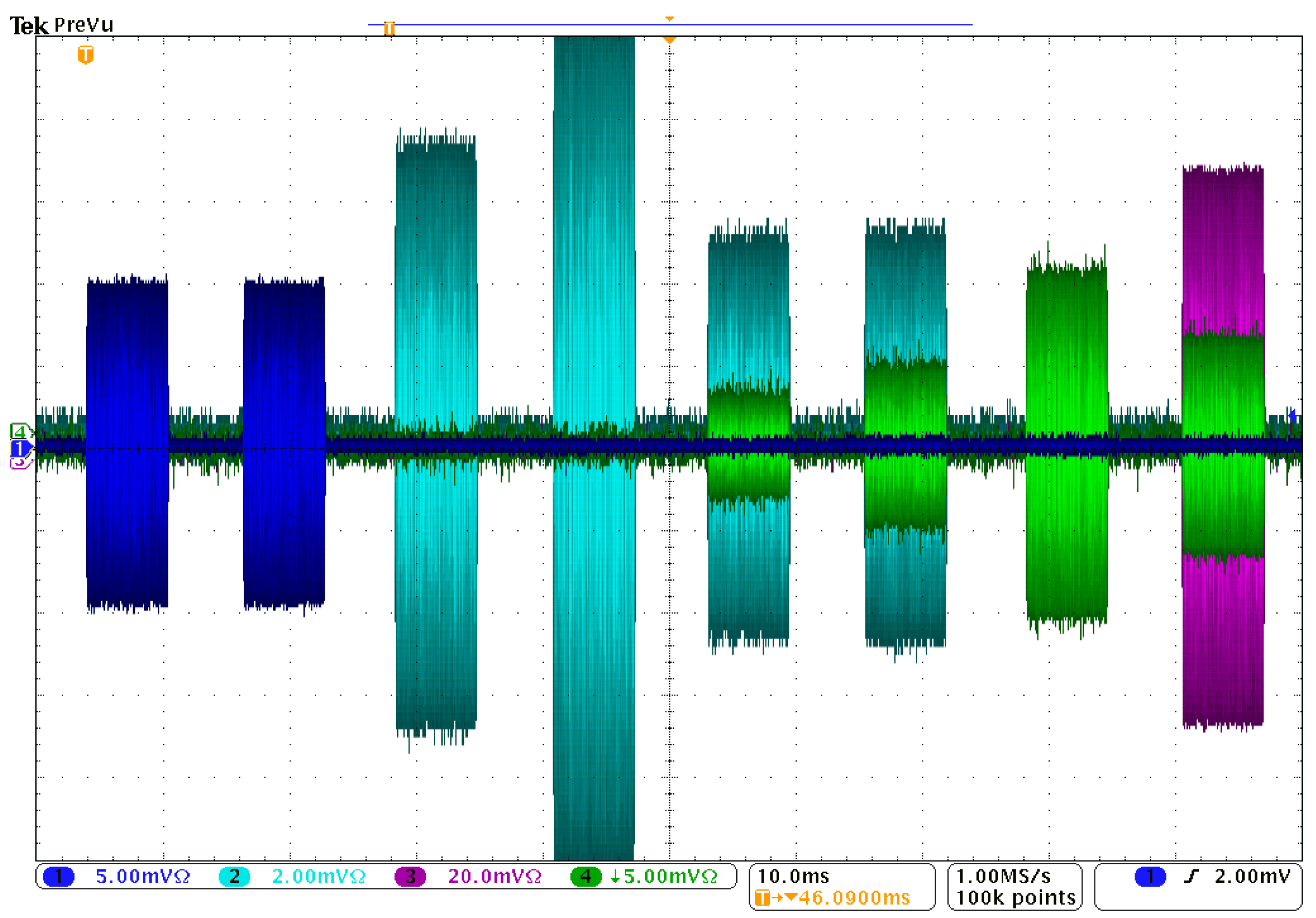
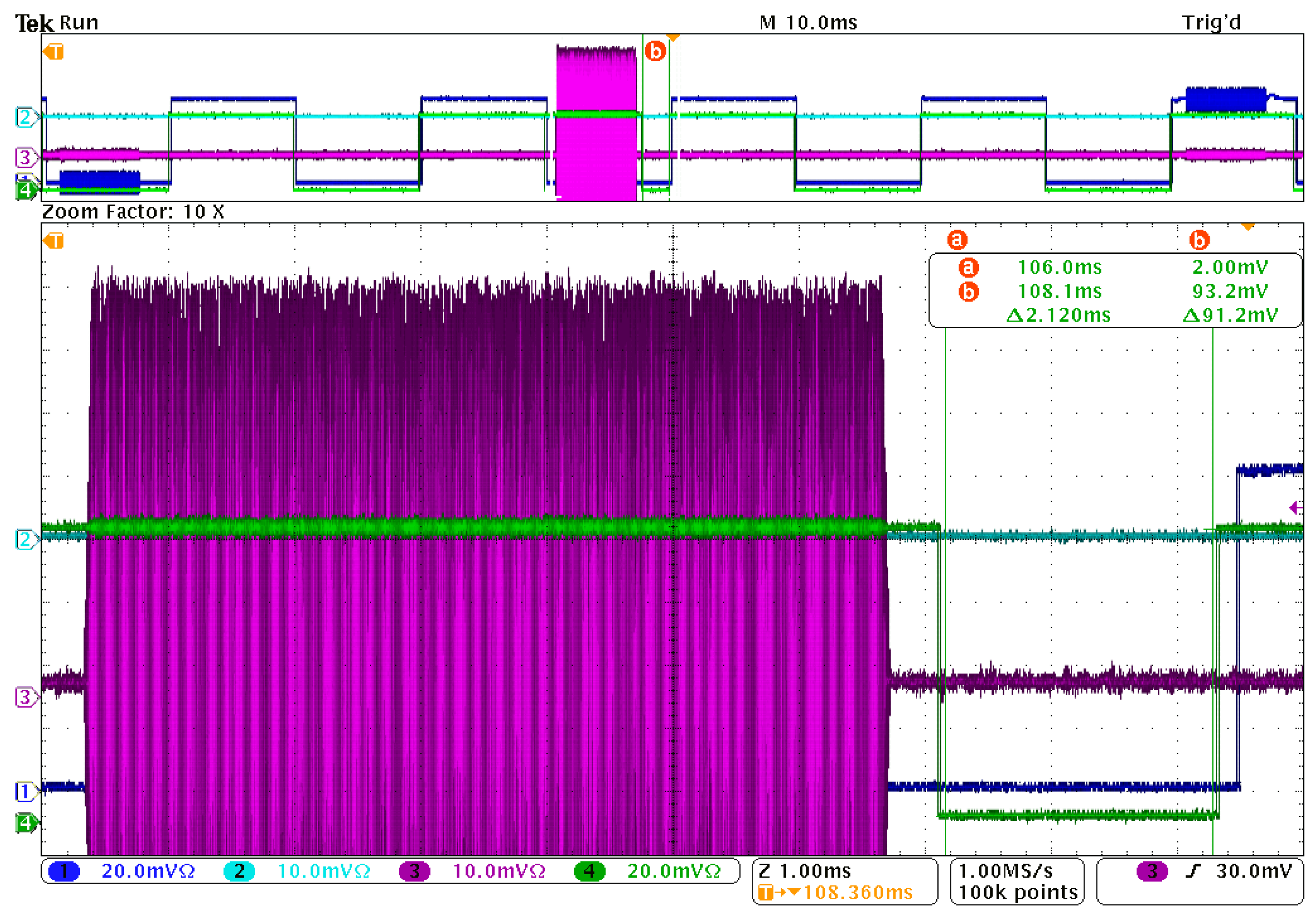
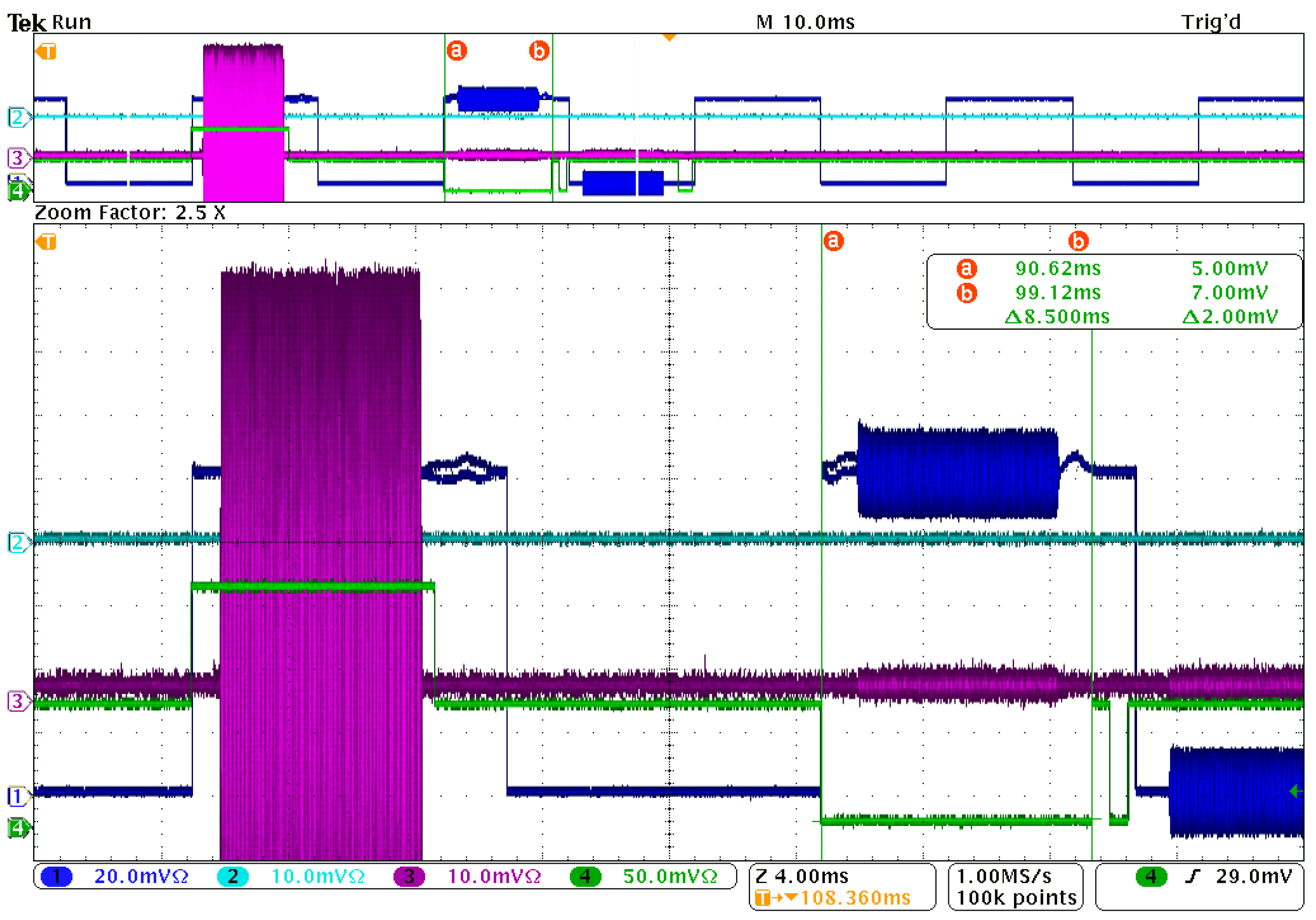
- Complex and slow data flow:
- Packet is placed onto the host system;
- Packet is transferred to the radio chip controller via not the fastest serial connection (transfer of 18 bytes takes near 1.6 ms!);
- Radio chip is programmed according to the transmission’s settings, radio chip’s power amplifier is awakened;
- Radio chip controller sends data to the radio chip via SPI (8 MHz clock);
- Packet is transmitted;
- On the receiving side, the received packet is transferred from the radio chip to the radio chip controller via SPI; according to the measurements made with the help of an oscilloscope, this and three previous steps together take around 8.5 ms using the described radio settings);
- Packet is transferred to the host (again 1.6 ms);
- Non-real time behavior of the host system was observed during experiments when it was working with serial ports: incoming data became delayed for many ms that resulted in the most devastating impact on to the packet throughput. This behavior actually dictated the implementation of the mentioned LARio modem API service thread on the host that worked like proxy, masking delays in serial communication and simplifying the communication with the LARio modem from user application on the host providing ready-to-use functions for lightweight access to LARio modem functionality.
4. Implementation and Results
4.1. Hardware
4.2. LoRa Stack
- Fully functional binary data radio modem;
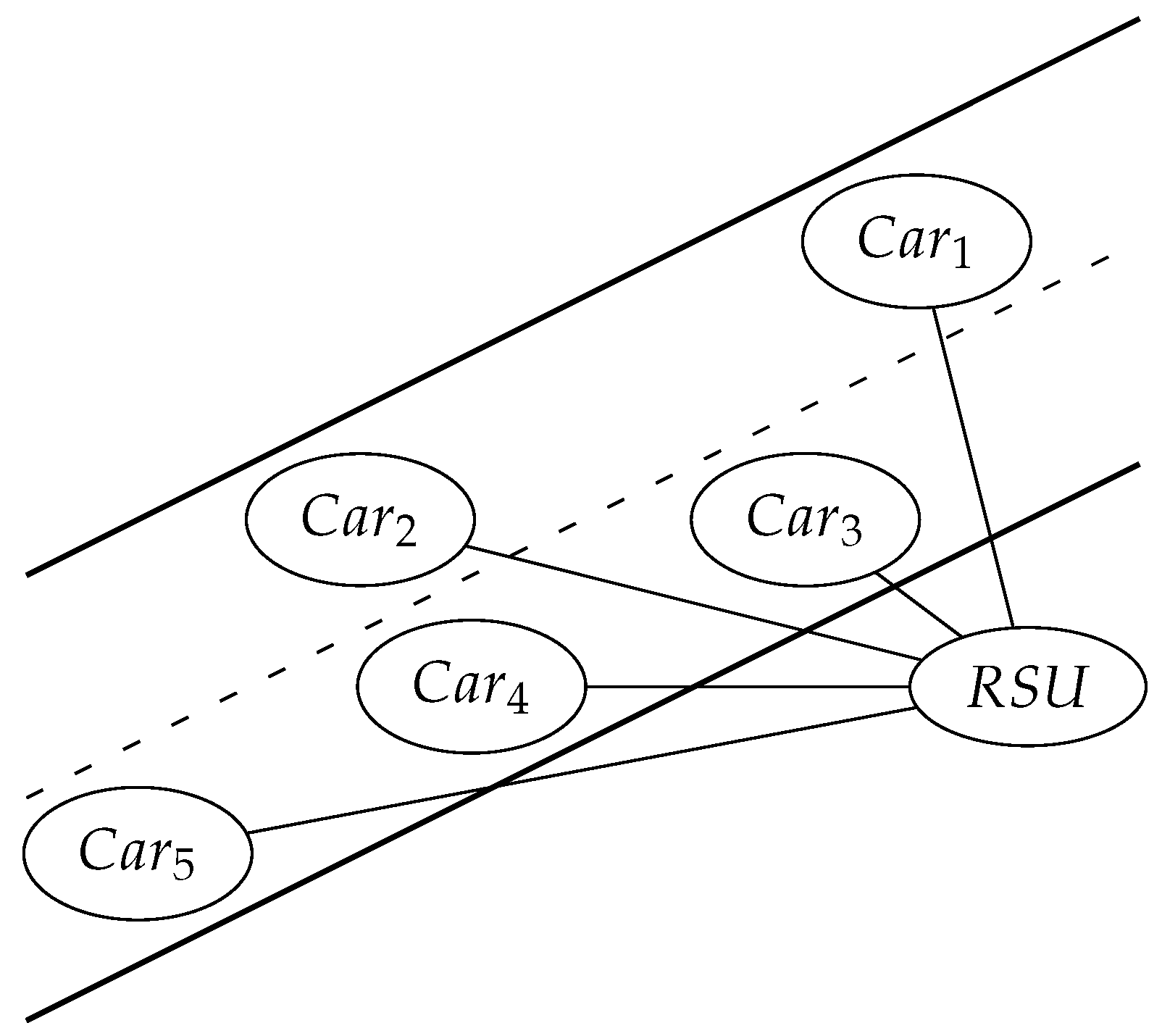
- Organization of and participation in MCBP message broadcast cells (supported by RSU and CAR host computers) for up to seven network members: RSU and six CAR nodes (proven working in test, see below).
4.3. MCBP Stack
- Resolution of car coordinates: accuracy of the car coordinates is defined as a number 1–5 in meters except cases C.1.4.1 “Overtaking vehicle warning” and C.1.5.4 “Intersection Collision Warning” when positioning accuracy is defined as “Accurate positioning of vehicles on digital map” and C.1.5.5 “Co-operative forward collision warning” when positioning accuracy must be less than 1 m;
- Minimum period of messages: the most important message broadcast period is defined as 10 Hz;
- Maximum latency of messages: for the most messages, it is defined as 100 ms except case C.1.4.3 “Pre-crash sensing warning” when latency is defined as 50 ms (for similar cases C.1.5.1 “Across traffic turn collision risk warning”, C.1.5.2 “Merging Traffic Turn Collision Risk Warning” etc. it is 100 ms);
- Message content: each message application defines its content to fulfill the specific application case; in some cases, necessary information can be derived from car direction, speed, and current coordinates; in most cases, it is all the data needed;
- Message usage cases and communication mode that both are related to the message class: for example, warning messages should be transmitted for only a limited time whilst informative messages should be transmitted permanently periodically or periodically triggered by an authoritative message from RSU.
- Hardware Zone Beacon Manager (HZBM) is usually on the RSU mounted embedded system with an attached LARio modem that, with the help of a specific command from the host, is configured to work as a network cell master. An according working mode of the LARio modem is called the “RSU mode”;
- Software Zone Beacon Manager (SZBM) is usually a non-stationary dynamic self-organizing network master. An according working mode of the LARio modem has not been developed yet;
- Car Traffic Data Manager (CTDM) is usually an on-vehicle mounted embedded system with an attached LARio modem that, with the help of a specific command, is configured to work as a network cell client. An according working mode of the LARio modem is called a “CAR mode”.
4.3.1. MCBP Stack, RSU Mode
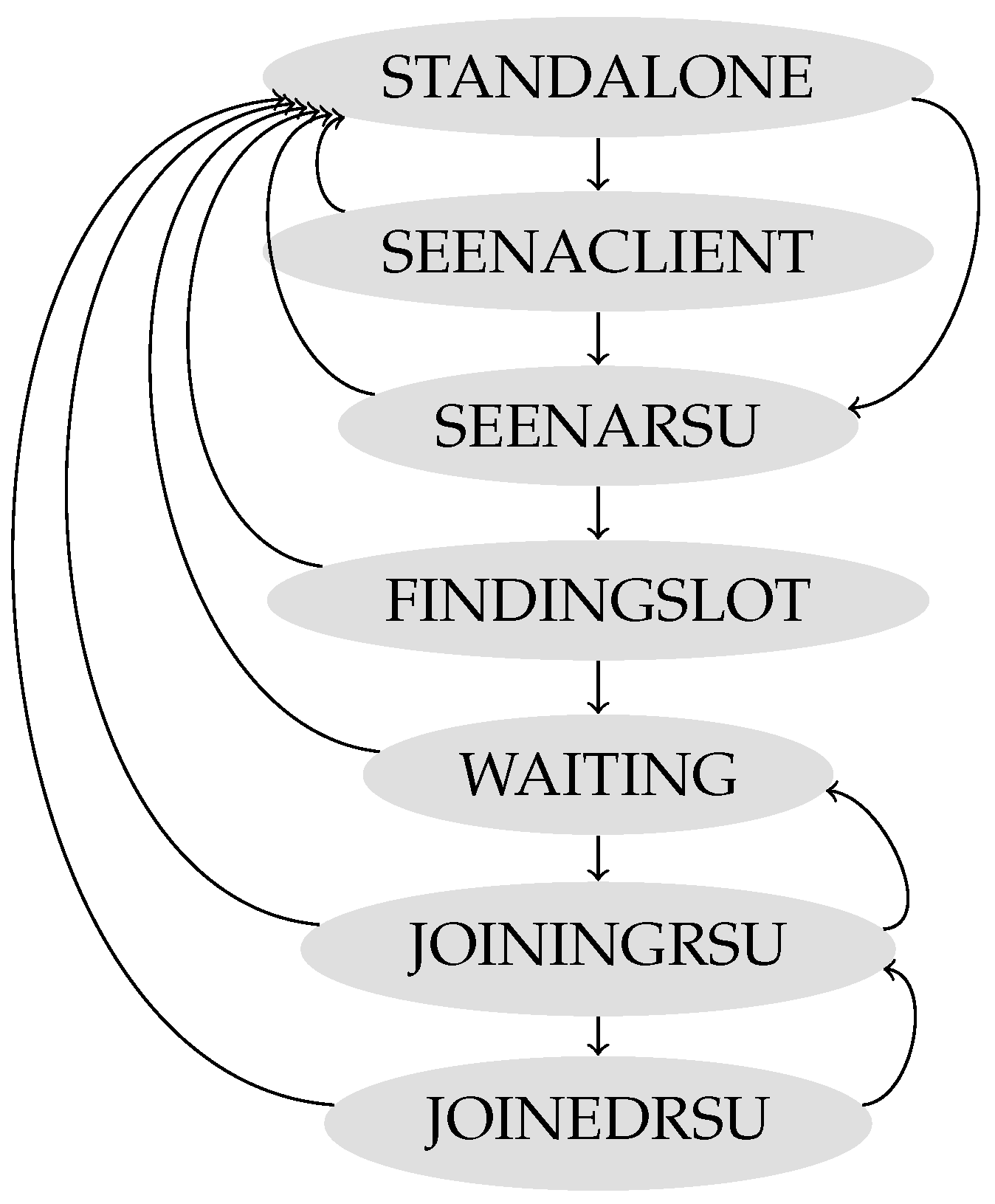
4.3.2. MCBP Stack, CAR Mode
- STANDALONE: if a valid RSU packet is received, the state switches to the SEENARSU state; if a valid CAR packet is received, the state switches to the SEENACLIEN state. These states are utilized in later stages of MCBP development;
- SEENACLIENT: this state in the CAR mode has the same meaning as the STANDALONE state; if a valid RSU packet is received, the state switches to the SEENARSU state. This state is used in the next development stages in a dynamic network cell of clients with equal rights to be elected as Software Zone Beacon Manager;
- SEENARSU: this is an intermediate state used to minimize EMI noise impact on to the process of joining to the network cell. If a valid RSU packet is received again, the state switches to the FINDINGSLOT state to start joining the RSU managed cell;
- FINDINGSLOT: in this and next states, if a valid HZBM packet is received, the node chooses or updates a random not taken network node identification number (NNID), a free time slot, and a random time-frame delay counter from one to three. In this state, the CAR node then enters the WAITING state if in cell at least one time slot is free.The random not taken NNID is used to allow the CAR node control the response from the RSU node and identify itself during the process of the CAR node joining to the RSU node-organized HZBM cell. Random time-frame delay counter is used to avoid collisions potentially made by multiple joining CAR nodes aiming to transmit in the same time slot.In this and next states, if other CAR node messages are received, the current CAR node updates internal data structures about their NNID and corresponding time slots;
- WAITING: in this state, the CAR node after reception of the MCZB package re-plans the time slot number and compares it with the previously generated: if the time slots are the same, the random time-frame delay counter is decremented and the node enters the next state when this counter reaches zero. If the re-planned time slot is zero, the state is reset to STANDALONE since there are no free time slots anymore;
- JOININGRSU: during this state, the CAR node is transmitting its data packet in a chosen time slot; if the CAR node can identify itself as a valid network node in the following MCBP network organization packet sent by the RSU node in time slot zero of the next time-frame, it changes the state to JOINEDRSU. Otherwise, it re-plans the time slot number again and compares the re-planned time slot number with the previous one: if teh time slot is the same and the random time-frame dalay counter is not zero, the state is changed back to WAITING; if the updated time slot is zero, the state is reset to STANDALONE; otherwise, the state is changed to WAITING;
- JOINEDRSU: in this state, other CAR node data messages can be processed according to the meaning of data in the current MCBP cell. If the CAR node finds that in the HZBM network organizing the packet the actual time slot is assigned to the different CAR node, it concludes that the RSU node was not able to receive the current CAR node messages for more than Time To Live time (3 s) and gives an according time slot to the other CAR node. In this case, the current state is changed to JOININGRSU.
4.4. MCBP Stack: Test Setup
4.5. MCBP Stack: Test Results
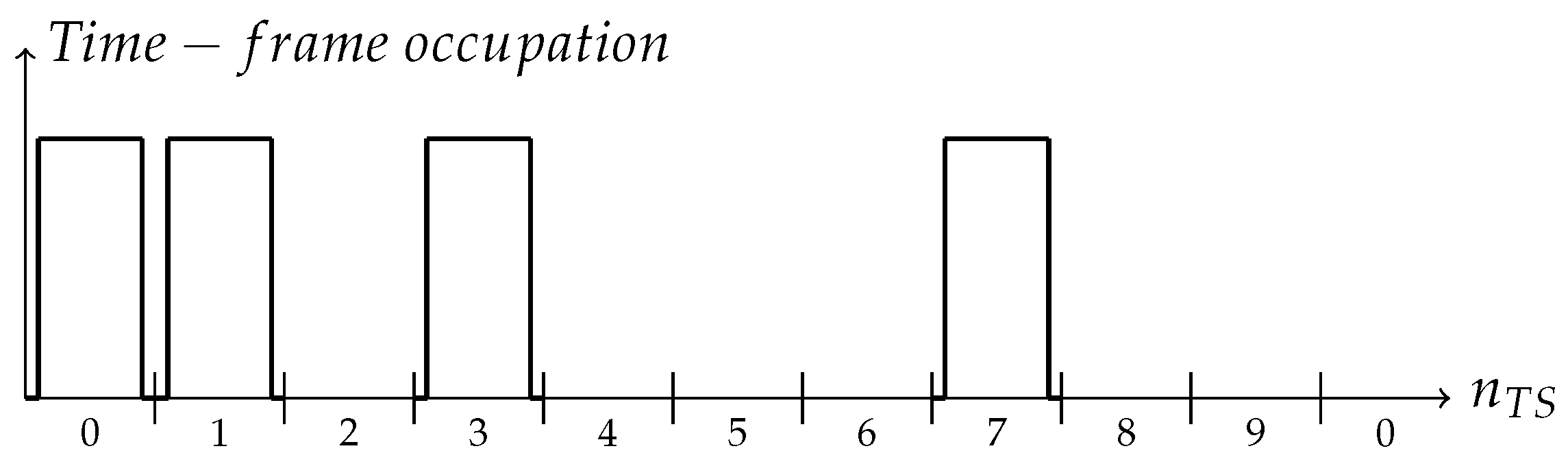
- TDMA frame size 100 ms; accordingly, data latency can be no larger than 100 ms if the host connected to the node updates transmitted data with a frequency no lesser than 10 Hz;
- Broadcast message size 18 bytes (14 bytes payload data);
- Stable communication for time slot count equal to eight.
4.6. Applications
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAM | Cooperative Awareness Message |
| CTDM | Car Traffic Data Manager |
| GPRS | General Packet Radio Service |
| HZBM | Hardware Zone Beacon Manager |
| ISM | Industrial, Scientific, and Medical |
| ITS | Intelligent Traffic System |
| LARio | LoRa Advanced Radio Input/Output |
| LTE | Long-Term Evolution [standard] |
| LoRa | Long Range [radio, modulation scheme] |
| LoRaWAN | LoRa-Based Low-Power Wide-Area Networking Protocol |
| MCBP | Mobile Cell Broadcast Protocol |
| MCU | Micro-Controller Unit |
| NNID | Network Node Identification Number |
| OSI | Open Systems Interconnection |
| P2P | Peer-to-Peer |
| RSU | Road Side Units |
| SF | Spreading Factor (in form SF6: Spreading Factor 6) |
| SPI | Serial Peripheral Interface |
| SZBM | Software Zone Beacon Manager |
| TDMA | Time Division Multiple Access |
| TMS | Traffic Management System |
| ToA | Time on Air |
| V2I | Vehicle to Infrastructure |
| V2V | Vehicle to Vehicle |
| V2X | Vehicle to Everything |
| WiFi | Wireless Network Protocol |
References
- Zhang, S.; Chen, J.; Lyu, F.; Cheng, N.; Shi, W.; Shen, X. Vehicular Communication Networks in the Automated Driving Era. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef]
- Liu, W.; Hua, M.; Deng, Z.; Meng, Z.; Huang, Y.; Hu, C.; Song, S.; Gao, L.; Liu, C.; Shuai, B.; et al. A Systematic Survey of Control Techniques and Applications in Connected and Automated Vehicles. IEEE Internet Things J. 2023, 10, 21892–21916. [Google Scholar] [CrossRef]
- Adnan Yusuf, S.; Khan, A.; Souissi, R. Vehicle-to-everything (V2X) in the autonomous vehicles domain—A technical review of communication, sensor, and AI technologies for road user safety. Transp. Res. Interdiscip. Perspect. 2024, 23, 100980. [Google Scholar] [CrossRef]
- Wang, Y.; Szeto, W.; Han, K.; Friesz, T.L. Dynamic traffic assignment: A review of the methodological advances for environmentally sustainable road transportation applications. Transp. Res. Part B: Methodol. 2018, 111, 370–394. [Google Scholar] [CrossRef]
- Bharadwaj, R.; Deepak, J.; Baranitharan, M.; Vaidehi, V. Efficient dynamic traffic control system using wireless sensor networks. In Proceedings of the 2013 International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 25–27 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 668–673. [Google Scholar]
- Zhou, Y.; Wang, J.; Yang, H. Resilience of Transportation Systems: Concepts and Comprehensive Review. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4262–4276. [Google Scholar] [CrossRef]
- Alonso Raposo, M.; Grosso, M.; Després, J.; Fernández Macías, E.; Galassi, C.; Krasenbrink, A.; Krause, J.; Levati, L.; Mourtzouchou, A.; Saveyn, B.; et al. An Analysis of Possible Socio-Economic Effects of a Cooperative, Connected and Automated Mobility (CCAM) in Europe; European Union: Brussels, Belgium, 2018. [Google Scholar]
- ETSI. ETSI TR 102 638. Technical Report, v1.1.1, Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Definitions; ETSI: Sophia Antipolis, France, 2009. [Google Scholar]
- Barrachina, J.; Garrido, P.; Fogue, M.; Martinez, F.J.; Cano, J.C.; Calafate, C.T.; Manzoni, P. Road side unit deployment: A density-based approach. IEEE Intell. Transp. Syst. Mag. 2013, 5, 30–39. [Google Scholar] [CrossRef]
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data aggregation and roadside unit placement for a VANET Traffic Information System. In Proceedings of the fifth ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 58–65. [Google Scholar]
- Abdrabou, A.; Zhuang, W. Probabilistic delay control and road side unit placement for vehicular ad hoc networks with disrupted connectivity. IEEE J. Sel. Areas Commun. 2010, 29, 129–139. [Google Scholar] [CrossRef]
- Agafonovs, N.; Strazdins, G.; Greitans, M. Accessible, customizable, high-performance ieee 802.11 p vehicular communication solution. In Proceedings of the 2012 the 11th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Ayia Napa, Cyprus, 19–22 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 127–132. [Google Scholar]
- Desai, M.; Manjunath, D. On the connectivity in finite ad hoc networks. IEEE Commun. Lett. 2002, 6, 437–439. [Google Scholar] [CrossRef]
- Foh, C.H.; Liu, G.; Lee, B.S.; Seet, B.C.; Wong, K.J.; Fu, C.P. Network connectivity of one-dimensional MANETs with random waypoint movement. IEEE Commun. Lett. 2005, 9, 31–33. [Google Scholar]
- Gore, A.D. Comments on “On the connectivity in finite ad hoc networks”. IEEE Commun. Lett. 2006, 10, 88–90, Erratum in IEEE Commun. Lett. 2006, 10, 359. [Google Scholar] [CrossRef]
- Ghasemi, A.; Nader-Esfahani, S. Exact probability of connectivity one-dimensional ad hoc wireless networks. IEEE Commun. Lett. 2006, 10, 251–253. [Google Scholar] [CrossRef]
- Li, Y.; Liao, J.; Li, T.; Zhu, X.; Zhang, L.; Xie, S. Several statistical parameters for one-dimensional Vehicular Ad Hoc Networks. In Proceedings of the 2010 2nd IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 24–26 September 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 709–712. [Google Scholar]
- Deshpande, P.; Hou, X.; Das, S.R. Performance comparison of 3G and metro-scale WiFi for vehicular network access. In Proceedings of the 10th ACM SIGCOMM Conference on Internet Measurement, Melbourne, Australia, 1–30 November 2010; pp. 301–307. [Google Scholar]
- Balasubramanian, A.; Mahajan, R.; Venkataramani, A. Augmenting mobile 3G using WiFi. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010; pp. 209–222. [Google Scholar]
- Lehr, W.; McKnight, L.W. Wireless internet access: 3G vs. WiFi? Telecommun. Policy 2003, 27, 351–370. [Google Scholar] [CrossRef]
- Mikhaylov, K.; Petäjäjärvi, J.; Janhunen, J. On LoRaWAN scalability: Empirical evaluation of susceptibility to inter-network interference. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Cattani, M.; Boano, C.A.; Römer, K. An experimental evaluation of the reliability of lora long-range low-power wireless communication. J. Sens. Actuator Netw. 2017, 6, 7. [Google Scholar] [CrossRef]
- Reynders, B.; Wang, Q.; Tuset-Peiro, P.; Vilajosana, X.; Pollin, S. Improving reliability and scalability of lorawans through lightweight scheduling. IEEE Internet Things J. 2018, 5, 1830–1842. [Google Scholar] [CrossRef]
- Cheung, Y.; Qiu, M.; Liu, M. Autonomous vehicle communication in v2x network with lora protocol. In Smart Computing and Communication, Proceedings of the 4th International Conference, SmartCom 2019, Birmingham, UK, 11–13 October 2019; Proceedings 4; Springer: Berlin/Heidelberg, Germany, 2019; pp. 398–410. [Google Scholar]
- Sanchez-Iborra, R.; Gómez, J.S.; Santa, J.; Fernández, P.J.; Skarmeta, A.F. Integrating LP-WAN communications within the vehicular ecosystem. J. Internet Serv. Inf. Secur. 2017, 7, 45–56. [Google Scholar]
- Salazar-Cabrera, R.; De La Cruz, Á.P.; Molina, J.M.M. Fleet management and control system from intelligent transportation systems perspective. In Proceedings of the 2019 2nd Latin American Conference on Intelligent Transportation Systems (ITS LATAM), Bogota, Colombia, 19–20 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Salazar-Cabrera, R.; Pachón de la Cruz, Á.; Madrid Molina, J.M. Proof of concept of an iot-based public vehicle tracking system, using lora (long range) and intelligent transportation system (its) services. J. Comput. Netw. Commun. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Li, Y.; Yang, L.; Han, S.; Wang, X.; Wang, F.Y. When LPWAN meets ITS: Evaluation of low power wide area networks for V2X communications. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 473–478. [Google Scholar]
- Li, Y.; Han, S.; Yang, L.; Wang, F.Y.; Zhang, H. LoRa on the move: Performance evaluation of LoRa in V2X communications. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1107–1111. [Google Scholar]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. Lora architecture for v2x communication: An experimental evaluation with vehicles on the move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef]
- CAMP Vehicle Safety Communications Consortium. Vehicle Safety Communications Project: Task 3 Final Report: Identify Intelligent Vehicle Safety Applications Enabled by DSRC; National Highway Traffic Safety Administration, US Department of Transportation: Washington, DC, USA, 2005. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. On-demand TDMA for energy efficient data collection with LoRa and wake-up receiver. In Proceedings of the 2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Limassol, Cyprus, 15–17 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Samaras, K.; O’Brien, D.; Edwards, D. Analytical calculation of throughput of ALOHA based protocols in optical wireless data networks. IEE Proc.-Optoelectron. 2000, 147, 322–328. [Google Scholar] [CrossRef]
- Zimmermann, H. OSI reference model-the ISO model of architecture for open systems interconnection. IEEE Trans. Commun. 1980, 28, 425–432. [Google Scholar] [CrossRef]
- 5GAA. C-V2X Use Cases: Methodology, Examples and Service Level Requirements; GA Association: Sheffield, UK, 2019. [Google Scholar]
- Qin, Z.; Liu, Y.; Li, G.Y.; McCann, J.A. Performance Analysis of Clustered LoRa Networks. arXiv 2019, arXiv:1905.13510. [Google Scholar] [CrossRef]
- Electronic Communications Committee. ERC Recommendation 70-03; Electronic Communications Committee: Copenhagen, Denmark, 2018. [Google Scholar]
- Federal Communications Commission. FCC Part 15–Radio Frequency Devices, Code of Federal Regulation 47 CFR Ch. 1; 10-1-15 Edition; Federal Communications Commission: Washington, DC, USA, 2015. [Google Scholar]
- Khutsoane, O.; Isong, B.; Abu-Mahfouz, A.M. IoT devices and applications based on LoRa/LoRaWAN. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 6107–6112. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
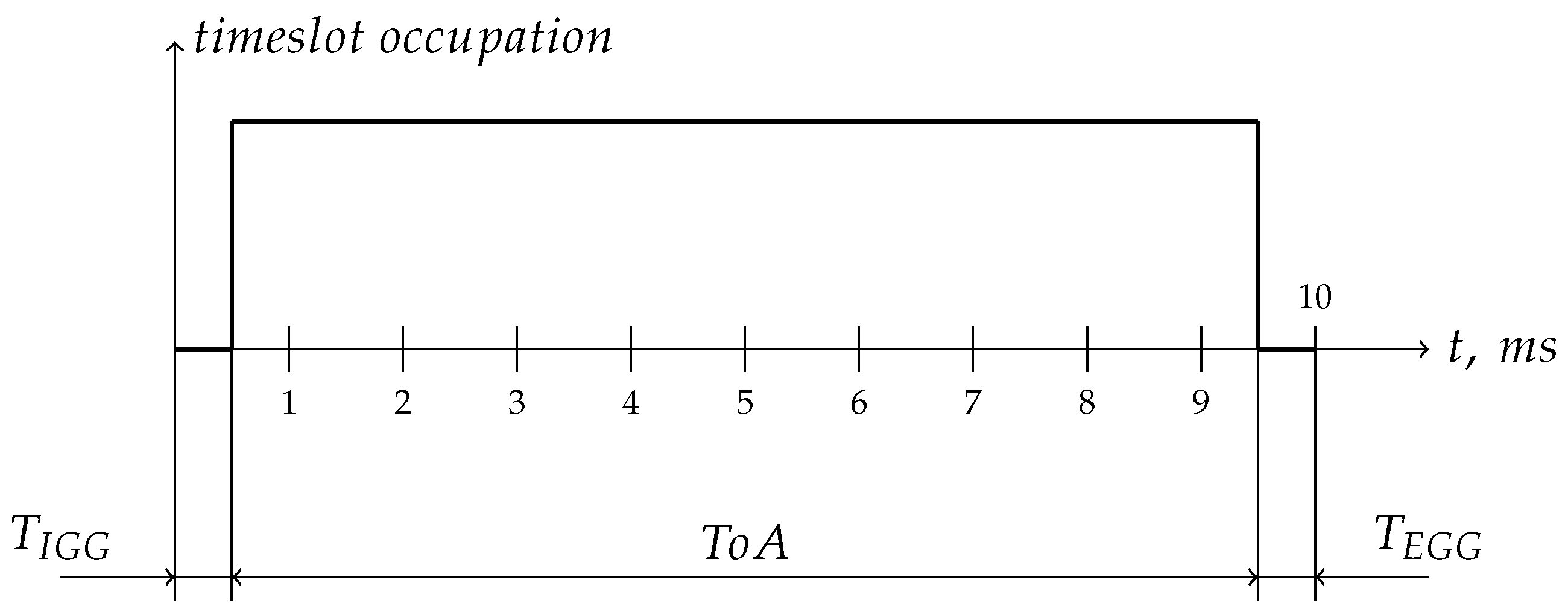
| N | 7 | 8 | 9 | 10 | 100 |
| ToA, ms | 14.3 | 12.5 | 11.1 | 10 | 1 |
| N# | Event | Average, ms | Variation, ms |
|---|---|---|---|
| 1 | Time-frame size | 100 | 0.05 |
| 2 | Time slot size | 12.5 | 0.05 |
| 3 | Time slot count | 8 | - |
| 4 | RSU nodes time slot zero data packet delay after the time slot start | 1.38 | 0.05 |
| 5 | CAR node time slot zero jitter | +0.1–−0.25 | - |
| 6 | Minimal time after the RSU packet reception by CAR node till start of the next time slot | 1.9 | 0.05 |
| 7 | Minimal time after the packet transmission by CAR node till start of the next time slot | 2 | 0.05 |
| 8 | Delay after packet transmission till confirmation from RF chip | 0.4 | 0.05 |
| 9 | Time between time slot zero start and reception of the RSUs time slot zero packet by CAR node | 8.5 | 0.05 |
| 10 | Time between time slot zero start and moment when CAR node finishes processing of the RSUs time slot zero packet | 8.9 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Greitans, M.; Gaigals, G.; Levinskis, A. Implementation of LoRa TDMA-Based Mobile Cell Broadcast Protocol for Vehicular Networks. Information 2025, 16, 447. https://doi.org/10.3390/info16060447
Greitans M, Gaigals G, Levinskis A. Implementation of LoRa TDMA-Based Mobile Cell Broadcast Protocol for Vehicular Networks. Information. 2025; 16(6):447. https://doi.org/10.3390/info16060447
Chicago/Turabian StyleGreitans, Modris, Gatis Gaigals, and Aleksandrs Levinskis. 2025. "Implementation of LoRa TDMA-Based Mobile Cell Broadcast Protocol for Vehicular Networks" Information 16, no. 6: 447. https://doi.org/10.3390/info16060447
APA StyleGreitans, M., Gaigals, G., & Levinskis, A. (2025). Implementation of LoRa TDMA-Based Mobile Cell Broadcast Protocol for Vehicular Networks. Information, 16(6), 447. https://doi.org/10.3390/info16060447