





The Correlation Between Self-Assessment and Observation in Driving Style Classification: An On-Road Case Study
 , , , , , and
, , , , , and
Abstract

1. Introduction
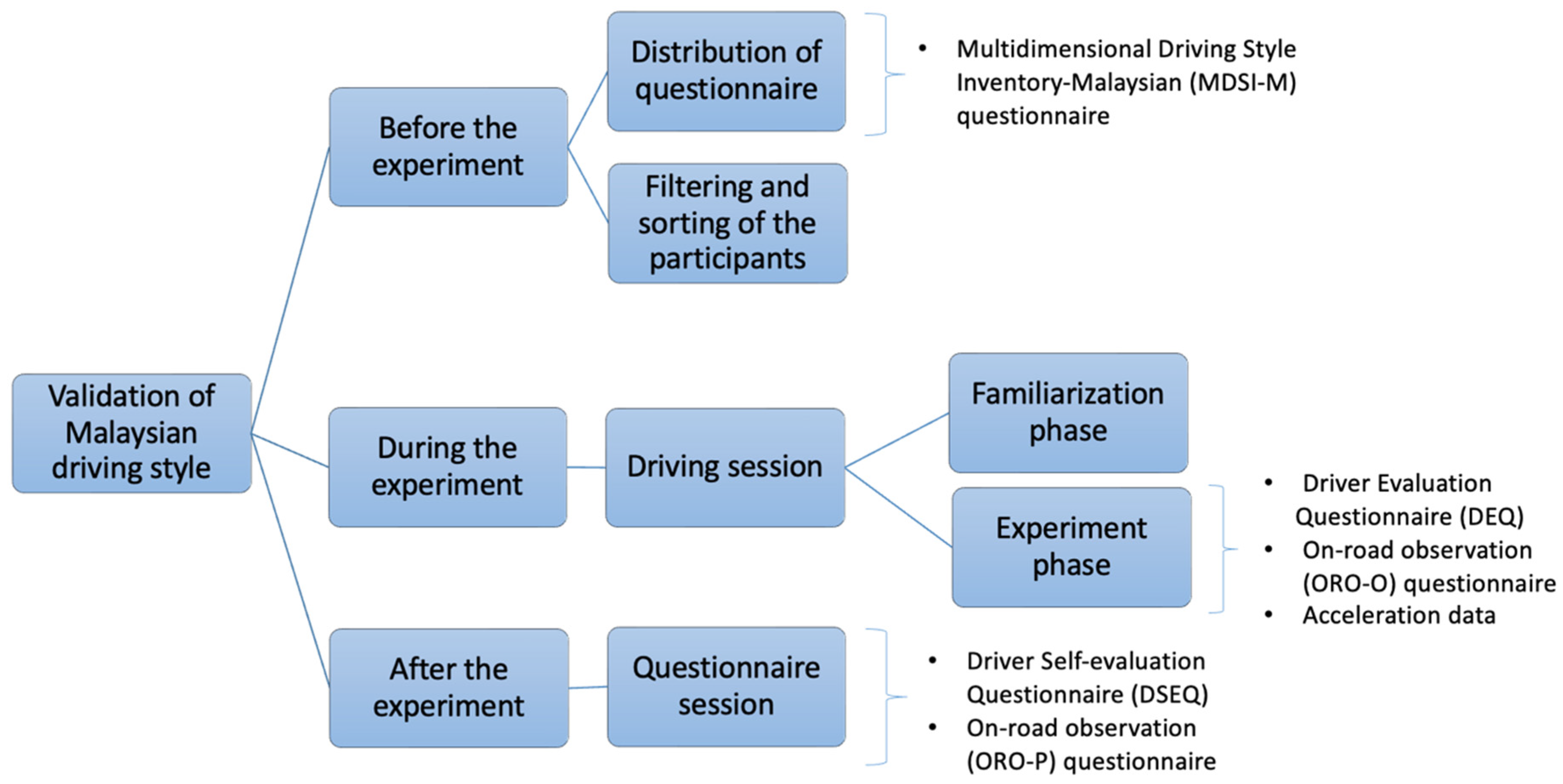
2. Method
2.1. Participant
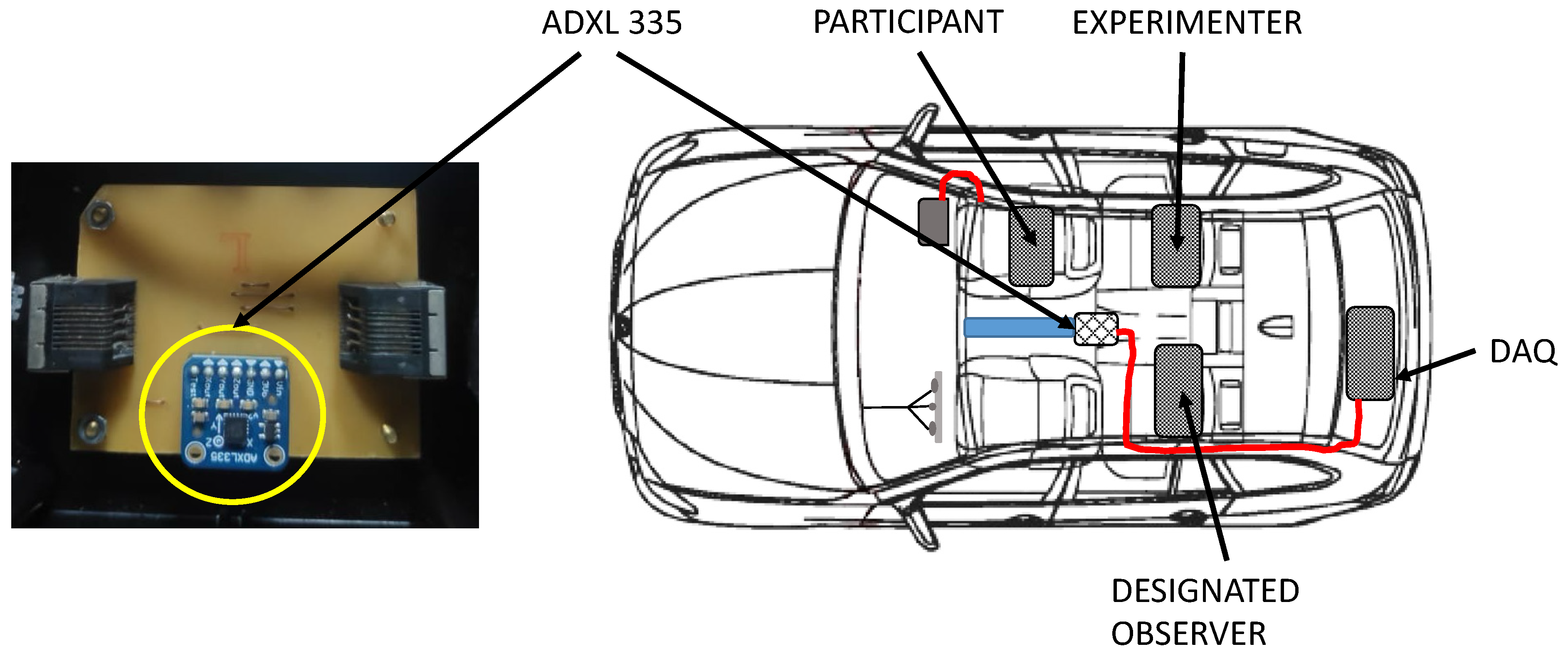
2.2. Instrumented Vehicle
2.3. Designated Route
2.4. Questionnaire
3. Results and Discussion
3.1. Pearson Correlation for Self-Assessment Questionnaire
3.1.1. Evaluation Between DEQ (Observer) and DSEQ (Participant)
3.1.2. Correlation of MDSI-M with the Acceleration Data
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ishibashi, M.; Okuwa, M.; Doi, S.; Akamatsu, M. Indices for Characterizing Driving Style and Their Relevance to Car Following Behavior. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 1132–1137. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Kamruzzaman, M. Smart cities and mobility: Does the smartness of Australian cities lead to sustainable commuting patterns? J. Urban Technol. 2019, 26, 21–46. [Google Scholar] [CrossRef]
- Qiao, Z.; Sun, X.; Loeb, H.; Mangharam, R. Drive Right: Shaping Public’s Trust, Understanding, and Preference Towards Autonomous Vehicles Using a Virtual Reality Driving Simulator. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–8. [Google Scholar]
- Delmas, M.; Camps, V.; Lemercier, C. Personalizing automated driving speed to enhance user experience and performance in intermediate-level automated driving. Accid. Anal. Prev. 2024, 199, 107512. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Zhou, Y.; Wu, J.; Liu, H.; Yang, L.; Lv, C. Human-Guided Continual Learning for Personalized Decision-Making of Autonomous Driving. IEEE Trans. Intell. Transp. Syst. Early Access 2025. [Google Scholar] [CrossRef]
- Sagberg, F.; Selpi; Piccinini, G.F.B.; Engström, J. A Review of Research on Driving Styles and Road Safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef]
- Cordero, J.; Aguilar, J.; Aguilar, K.; Chávez, D.; Puerto, E. Recognition of the Driving Style in Vehicle Drivers. Sensors 2020, 20, 2597. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Yang, L.; Ma, R.; Zhang, H.M.; Guan, W.; Jiang, S. Driving behavior recognition using EEG data from a simulated car-following experiment. Accid. Anal. Prev. 2018, 116, 30–40. [Google Scholar] [CrossRef]
- Basu, C.; Yang, Q.; Hungerman, D.; Singhal, M.; Dragan, A.D. Do You Want Your Autonomous Car to Drive Like You? In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 417–425. [Google Scholar] [CrossRef]
- Taubman-Ben-Ari, O.; Mikulincer, M.; Gillath, O. The multidimensional driving style inventory—Scale construct and validation. Accid. Anal. Prev. 2004, 36, 323–332. [Google Scholar] [CrossRef]
- van Huysduynen, H.H.; Terken, J.; Martens, J.-B.; Eggen, B. Measuring Driving Styles. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 257–264. [Google Scholar] [CrossRef]
- Karjanto, J.; Yusof, N.M.; Terken, J.; Hassan, M.Z.; Delbressine, F.; van Huysduynen, H.H.; Rauterberg, M. The identification of Malaysian driving styles using the multidimensional driving style inventory. MATEC Web Conf. 2016, 90, 01004. [Google Scholar] [CrossRef]
- Martinussen, L.M.; Hakamies-Blomqvist, L.; Møller, M.; Özkan, T.; Lajunen, T. Age, gender, mileage and the DBQ: The validity of the Driver Behavior Questionnaire in different driver groups. Accid. Anal. Prev. 2013, 52, 228–236. [Google Scholar] [CrossRef]
- Glendon, A.I.; Dorn, L.; Matihews, G.; Gulian, E.; Davies, D.R.; Debney, L.M. Reliability of the driving behaviour inventory. Ergonomics 1993, 36, 719–726. [Google Scholar] [CrossRef]
- French, D.J.; West, R.J.; Elander, J.; Wilding, J.M. Decision-making style, driving style, and self-reported involvement in road traffic accidents. Ergonomics 1993, 36, 627–644. [Google Scholar] [CrossRef] [PubMed]
- West, R.; Hall, J. The role of personality and attitudes in traffic accident risk. Appl. Psychol. 1997, 46, 253–264. [Google Scholar] [CrossRef]
- Holman, A.C.; Havârneanu, C.E. The Romanian version of the multidimensional driving style inventory: Psychometric properties and cultural specificities. Transp. Res. Part F Traffic Psychol. Behav. 2015, 35, 45–59. [Google Scholar] [CrossRef]
- Long, S.; Ruosong, C. Reliability and validity of the Multidimensional Driving Style Inventory in Chinese drivers. Traffic Inj. Prev. 2019, 20, 152–157. [Google Scholar] [CrossRef]
- Padilla, J.L.; Castro, C.; Doncel, P.; Taubman, O. Adaptation of the multidimensional driving styles inventory for Spanish drivers: Convergent and predictive validity evidence for detecting safe and unsafeAC driving styles. Accid. Anal. Prev. 2020, 136, 105413. [Google Scholar] [CrossRef]
- Kamaludin, M.Z.A.; Bin Karjanto, J.; Muhammad, N.; Yusof, N.M.; Hassan, M.Z.; Zulkifli, A.F.; Ab Rashid, A.A. Exploration of Automated Vehicle’s Driving Style by Adapting Multidimensional Driving Styles Inventory for Malaysian Drivers. Adv. Transp. Stud. 2022, 58, 229–244. [Google Scholar] [CrossRef]
- Sümer, N.; Özkan, T.; Lajunen, T. Asymmetric relationship between driving and safety skills. Accid. Anal. Prev. 2006, 38, 703–711. [Google Scholar] [CrossRef]
- Shanker RJonas, A.; Devitt, S.; Huberty, K.; Flannery, S.; Greene, W.; Swinburne, B.; Locraft, G.; Wood, A.; Weiss, K.; Moore, J. Autonomous cars: Self-driving the new auto industry paradigm. Morgan Stanley Blue Pap. 2013, 1–109. [Google Scholar]
- Beiker, S.A. Legal aspects of autonomous driving. Santa Clara L. Rev. 2012, 52, 1145. [Google Scholar] [CrossRef]
- van Huysduynen, H.H.; Terken, J.; Eggen, B. The relation between self-reported driving style and driving behaviour. A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 245–255. [Google Scholar] [CrossRef]
- WÅhlberg, A.A.F. Driver Behaviour and Accident Research Methodology: Unresolved Problems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- West, R.; French, D.; Kemp, R.; Elander, J. Direct observation of driving, self reports of driver behaviour, and accident involvement. Ergonomics 1993, 36, 557–567. [Google Scholar] [CrossRef] [PubMed]
- Holland, C.; Geraghty, J.; Shah, K. Differential moderating effect of locus of control on effect of driving experience in young male and female drivers. Personal. Individ. Differ. 2010, 48, 821–826. [Google Scholar] [CrossRef]
- Amado, S.; Arikan, E.; Kaça, G.; Koyuncu, M.; Turkan, B.N. How accurately do drivers evaluate their own driving behavior? An on-road observational study. Accid. Anal. Prev. 2014, 63, 65–73. [Google Scholar] [CrossRef] [PubMed]
- Möller, H.-J. Effectiveness studies: Advantages and disadvantages. Dialogues Clin. Neurosci. 2011, 13, 199–207. [Google Scholar] [CrossRef]
- Vaitkus, V.; Lengvenis, P.; Zylius, G. Driving style classification using long-term accelerometer information. In 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR); IEEE: Piscataway, NJ, USA, 2014; pp. 641–644. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Milton, R.; Kiliaris, L. Driver’s Style Classification Using Jerk Analysis. In Proceedings of the 2009 IEEE Workshop on Computational Intelligence in Vehicles and Vehicular Systems, CIVVS 2009—Proceedings, Nashville, TN, USA, 30 March–2 April 2009; pp. 23–28. [Google Scholar] [CrossRef]
- Khorram, B.; Wåhlberg, A.E.A.; Kashani, A.T. Longitudinal jerk and acceleration as measures of safety in bus rapid transit drivers in Tehran. Theor. Issues Ergon. Sci. 2020, 21, 577–594. [Google Scholar] [CrossRef]
- Itkonen, T.H.; Pekkanen, J.; Lappi, O.; Kosonen, I.; Luttinen, T.; Summala, H. Trade-off between jerk and time headway as an indicator of driving style. PLOS ONE 2017, 12, e0185856. [Google Scholar] [CrossRef]
- Feng, F.; Bao, S.; Sayer, J.R.; Flannagan, C.; Manser, M.; Wunderlich, R. Can vehicle longitudinal jerk be used to identify aggressive drivers? An examination using naturalistic driving data. Accid. Anal. Prev. 2017, 104, 125–136. [Google Scholar] [CrossRef]
- Pande, A.; Chand, S.; Saxena, N.; Dixit, V.; Loy, J.; Wolshon, B.; Kent, J.D. A preliminary investigation of the relationships between historical crash and naturalistic driving. Accid. Anal. Prev. 2017, 101, 107–116. [Google Scholar] [CrossRef]
- Yan, F.; Liu, M.; Ding, C.; Wang, Y.; Yan, L. Driving style recognition based on electroencephalography data from a simulated driving experiment. Front. Psychol. 2019, 10, 1254. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef]
- Zardosht, M.; Beauchemin, S.S.; Bauer, M.A. Identifying Driver Behavior in Preturning Maneuvers Using In-Vehicle CANbus Signals. J. Adv. Transp. 2018, 2018, 5020648. [Google Scholar] [CrossRef]
- Choi, S.; Kim, J.; Kwak, D.; Angkititrakul, P.; Hansen, J.H.L. Analysis and classification of driver behavior using in-vehicle can-bus information. Bienn. Workshop DSP Veh. Mob. Syst. 2015, 2007, 17–19. [Google Scholar]
- Harris, P.B.; Houston, J.M.; Vazquez, J.A.; Smither, J.A.; Harms, A.; Dahlke, J.A.; Sachau, D.A. The Prosocial and Aggressive Driving Inventory (PADI): A self-report measure of safe and unsafe driving behaviors. Accid. Anal. Prev. 2014, 72, 1–8. [Google Scholar] [CrossRef]
- Zimbardo, P.G.; Keough, K.A.; Boyd, J.N. Present time perspective as a predictor of risky driving. Personal. Individ. Differ. 1997, 23, 1007–1023. [Google Scholar] [CrossRef]
- Götze, M.; Bißbort, F.; Petermann-Stock, I.; Bengler, K. ‘A careful driver is one who looks in both directions when he passes a red light’–increased demands in urban traffic. In International Conference on Human Interface and the Management of Information; Springer: Berlin/Heidelberg, Germany, 2014; pp. 229–240. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MDSI-M | ||||||
|---|---|---|---|---|---|---|
| Scale | Careful | Risky | Angry | Anxious | Dissociative | |
| ORO-O | Speed | −0.15 | 0.23 | 0.06 | 0.47 * | 0.38 * |
| Lane use and passing | −0.07 | 0.07 | −0.01 | 0.21 | 0.21 | |
| Road sign | 0.34 * | −0.29 | −0.17 | −0.49 * | −0.32 * | |
| Intersection and usage | −0.18 | −0.00 | 0.05 | 0.17 | 0.16 | |
| Clearance and checking | −0.05 | 0.11 | 0.06 | 0.34 * | 0.48 * | |
| Brakes and gears | 0.04 | 0.09 | 0.02 | 0.04 | 0.16 | |
| ORO-P | Speed | −0.21 | 0.11 | −0.01 | 0.01 | 0.28 |
| Lane use and passing | −0.39 * | −0.01 | −0.03 | 0.27 | 0.48 * | |
| Road sign | 0.15 | −0.24 | −0.34 * | −0.32 * | −0.27 | |
| Intersection usage | −0.28 | 0.02 | −0.05 | 0.02 | 0.39 * | |
| Clearance and checking | −0.08 | 0.09 | 0.14 | −0.01 | 0.10 | |
| Brakes and gears | −0.22 | 0.08 | −0.01 | 0.15 | 0.37 * | |
| Careful | Risky | Angry | Anxious | Dissociative | |
|---|---|---|---|---|---|
| DEQ | 0.17 | −0.30 | −0.19 | −0.34 * | −0.39 * |
| DSEQ | 0.47 * | −0.10 | 0.14 | −0.25 | −0.50 * |
| Population Size (N) | DEQ | DSEQ | ||||||
|---|---|---|---|---|---|---|---|---|
| Mean | SD | ANOVA | Mean | SD | ANOVA | |||
| Gender | Male | 30 | 3.89 | 0.56 | F(1,39) = 0.699 p = 0.408 | 3.93 | 0.43 | F(1,39) = 1.627 p = 0.002 * |
| Female | 11 | 3.73 | 0.38 | 3.48 | 0.21 | |||
| Driving experience | Novice driver | 10 | 3.83 | 0.50 | F(2,38) = 0.825 p = 0.448 | 3.95 | 0.40 | F(2,38) = 2.135 p = 0.132 |
| Moderate driver | 24 | 3.78 | 0.58 | 3.70 | 0.38 | |||
| Experienced driver | 7 | 4.07 | 0.27 | 4.00 | 0.56 | |||
| Annual mileage | Rarely drive | 5 | 3.96 | 0.53 | F(1,39) = 0.260 p = 0.613 | 3.68 | 0.56 | F(1,39) = 0.510 p = 0.480 |
| Daily driver | 36 | 3.83 | 0.53 | 3.83 | 0.41 | |||
| Items | DEQ | DSEQ | Z | ||
|---|---|---|---|---|---|
| M | SD | M | SD | ||
| Steering | 4.41 | 0.59 | 4.10 | 0.66 | −2.42 |
| Anger toward other drivers | 2.05 | 0.89 | 2.44 | 1.12 | −2.12 |
| Supportive driving | 3.95 | 1.05 | 3.88 | 0.75 | −0.22 |
| Anxiety | 2.49 | 1.12 | 2.39 | 1.22 | −0.41 |
| Vigilance | 4.39 | 0.97 | 4.10 | 0.70 | −1.96 |
| Safety | 3.93 | 0.99 | 4.32 | 0.61 | −2.13 |
| Fluent driving | 4.63 | 0.70 | 4.24 | 0.70 | −2.57 |
| Perceiving hazards in an intersection | 4.51 | 0.78 | 4.34 | 0.79 | −0.98 |
| Careful towards other road users | 4.34 | 0.73 | 4.49 | 0.51 | −0.93 |
| Driving behind a car without being impatient | 2.88 | 1.23 | 2.71 | 1.10 | −0.89 |
| Predicting traffic situations ahead | 4.22 | 0.65 | 4.00 | 0.78 | −0.28 |
| Fluent lane changes | 4.07 | 0.91 | 4.10 | 0.66 | −1.60 |
| Adjusting speed | 4.07 | 0.93 | 4.12 | 0.68 | −0.05 |
| Signal | 4.56 | 0.84 | 4.05 | 0.81 | −3.25 * |
| Relinquishing legitimate rights when necessary | 4.41 | 0.67 | 3.76 | 0.86 | −3.41 * |
| Avoiding risk | 4.22 | 1.01 | 4.29 | 0.72 | −0.04 |
| Conforming to speed limits | 3.07 | 1.59 | 3.39 | 0.83 | −1.33 |
| Obeying traffic lights | 2.98 | 1.39 | 3.85 | 0.73 | −3.41 * |
| Correlation (r) | |||||
|---|---|---|---|---|---|
| MDSI | Acceleration_Careful | Acceleration_Risky | Acceleration_Angry | Acceleration_Anxious | Acceleration_Dissociative |
| Careful | −0.28 * | 0.18 * | 0.10 | 0.28 | −0.05 |
| Risky | 0.23 | 0.07 * | 0.33 | 0.09 | 0.02 |
| Angry | 0.20 | 0.23 | 0.22 | 0.04 | 0.23 |
| Anxious | −0.37 | 0.19 | 0.09 | 0.00 | −0.11 |
| Dissociative | 0.13 | −0.01 | −0.03 | 0.23 | −0.33 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamaludin, M.Z.A.; Karjanto, J.; Muhammad, N.; Md Yusof, N.; Hassan, M.Z.; Baharom, M.Z.; Mohd Jawi, Z.; Rauterberg, M. The Correlation Between Self-Assessment and Observation in Driving Style Classification: An On-Road Case Study. Information 2025, 16, 140. https://doi.org/10.3390/info16020140
Kamaludin MZA, Karjanto J, Muhammad N, Md Yusof N, Hassan MZ, Baharom MZ, Mohd Jawi Z, Rauterberg M. The Correlation Between Self-Assessment and Observation in Driving Style Classification: An On-Road Case Study. Information. 2025; 16(2):140. https://doi.org/10.3390/info16020140
Chicago/Turabian StyleKamaludin, Muhammad Zainul Abidin, Juffrizal Karjanto, Noryani Muhammad, Nidzamuddin Md Yusof, Muhammad Zahir Hassan, Mohamad Zairi Baharom, Zulhaidi Mohd Jawi, and Matthias Rauterberg. 2025. "The Correlation Between Self-Assessment and Observation in Driving Style Classification: An On-Road Case Study" Information 16, no. 2: 140. https://doi.org/10.3390/info16020140
APA StyleKamaludin, M. Z. A., Karjanto, J., Muhammad, N., Md Yusof, N., Hassan, M. Z., Baharom, M. Z., Mohd Jawi, Z., & Rauterberg, M. (2025). The Correlation Between Self-Assessment and Observation in Driving Style Classification: An On-Road Case Study. Information, 16(2), 140. https://doi.org/10.3390/info16020140