
Graph Neural Networks and Open-Government Data to Forecast Traffic Flow



Abstract
1. Introduction
2. Related Work
2.1. Traffic Forecasting
2.2. Deep-Learning Approaches
2.3. Graph Neural Networks for Traffic Forecasting
3. Background
3.1. Temporal Graph Convolutional Network
3.2. Diffusion Convolutional Recurrent Neural Network
4. Research Approach
4.1. Data Collection
4.2. Data Pre-Processing
4.3. Forecasting Model Creation
4.4. Forecasting Model Evaluation
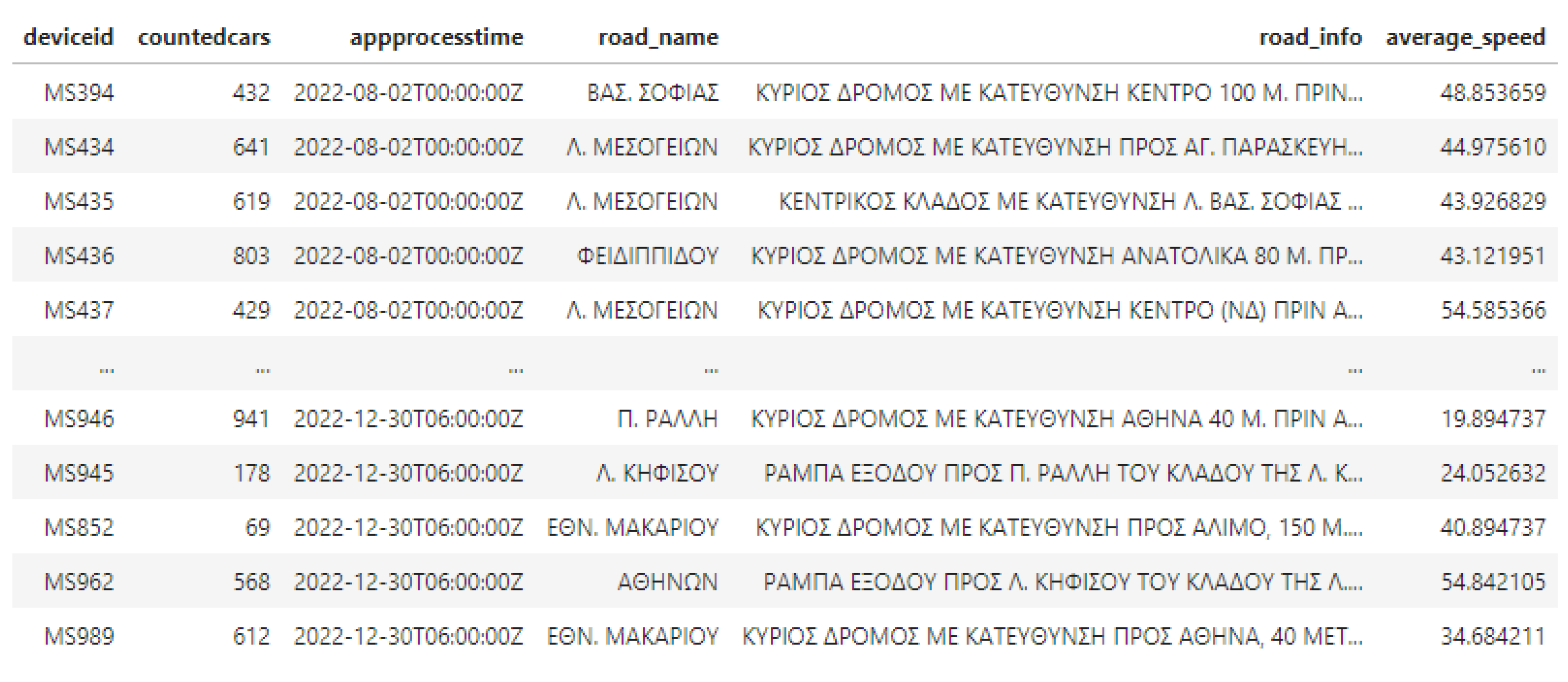
5. Data Collection
6. Data Pre-Processing
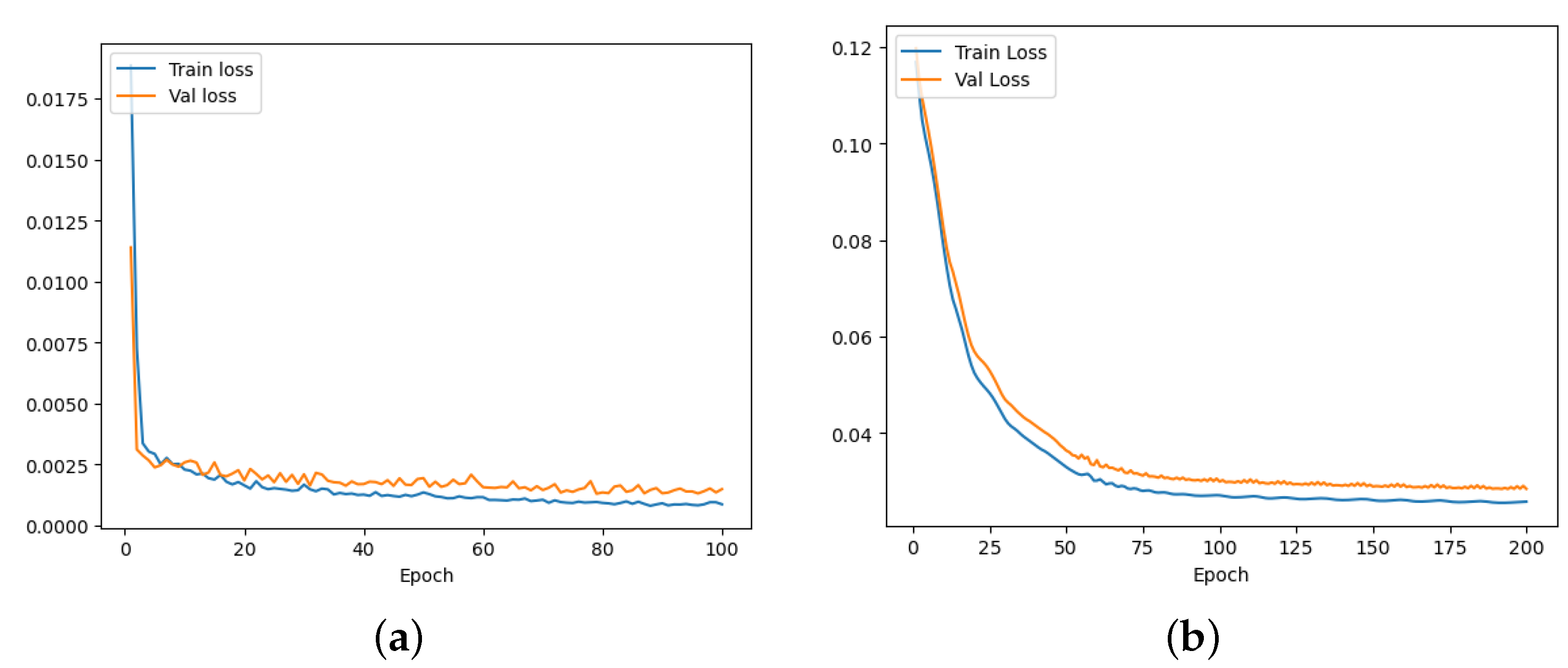
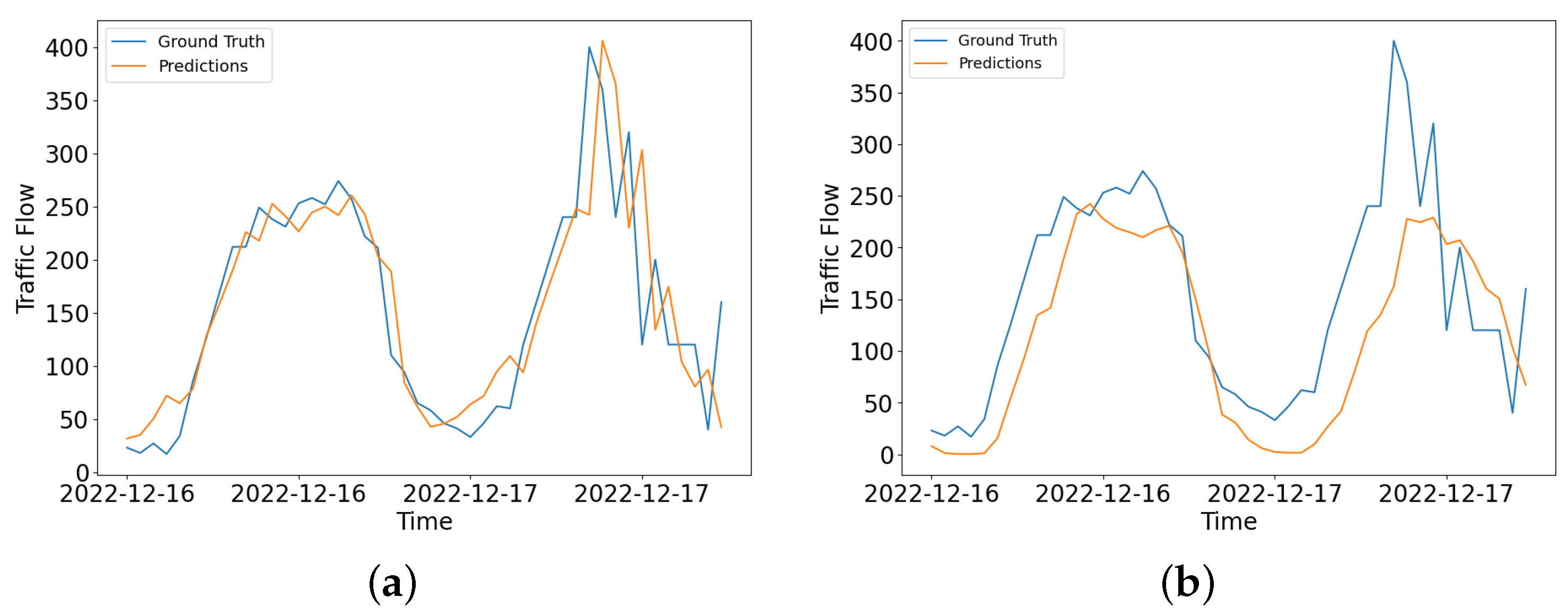
7. Forecasting Traffic Flow
8. Discussion
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ITS | Intelligent Transportation System |
| OGD | Open-Government Data |
| API | Application Programming Interface |
| JSON | JavaScript Object Notation |
| XML | eXtensible Markup Language |
| GNN | Graph Neural Networks |
| ARIMA | Autoregressive Integrated Moving Average |
| HA | Historical Average |
| SVR | Support Vector Regression |
| KNN | K-Nearest Neighbor |
| RNN | Recurrent Neural Network |
| GRU | Gated Recurrent Unit |
| LSTM | Long Short Memory |
| CNN | Convolutional Neural Network |
| GCN | Graph Convolutional Network |
| TGCN | Temporal Graph Convolutional Network |
| DCRNN | Diffusion Convolutional Recurrent Neural Network |
| ASTGCN | Attention-based Spatial–Temporal Graph Convolutional Network |
| IQR | InterQuartile Range |
| RMSE | Root Mean Squared Error |
| MAE | Mean Absolute Error |
| MAPE | Mean Absolute Percentage Error |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| G | A graph |
| V | The set of nodes of a graph |
| E | The set of edges of a graph |
| A | The adjacency matrix of a graph |
| Self-connection adjacency matrix and Identity matrix | |
| D | The degree matrix |
| X | The feature matrix consisting of historical traffic flows |
| First and second graph convolutional layers | |
| Weight matrices of first and second layers | |
| A non-linear activation function | |
| The Rectified Linear Unit for an input x: | |
| The output layer of a recurrent unit at time t, | |
| The reset and update gates of a GRU at time t | |
| The memory cell of a GRU at time t | |
| A diffusion convolution f over a graph signal x | |
| The parameters of a diffusion convolutional layer | |
| Input and output degree matrices of the DCRNN model | |
| IQR | the discrepancy between the 75th and 25th percentiles of the data |
References
- Lana, I.; Del Ser, J.; Velez, M.; Vlahogianni, E.I. Road Traffic Forecasting: Recent Advances and New Challenges. IEEE Intell. Transp. Syst. Mag. 2018, 10, 93–109. [Google Scholar] [CrossRef]
- Varga, N.; Bokor, L.; Takács, A.; Kovács, J.; Virág, L. An architecture proposal for V2X communication-centric traffic light controller systems. In Proceedings of the 2017 15th International Conference on ITS Telecommunications (ITST), Warsaw, Poland, 29–31 May 2017; pp. 1–7. [Google Scholar]
- Navarro-Espinoza, A.; López-Bonilla, O.R.; García-Guerrero, E.E.; Tlelo-Cuautle, E.; López-Mancilla, D.; Hernández-Mejía, C.; Inzunza-González, E. Traffic Flow Prediction for Smart Traffic Lights Using Machine Learning Algorithms. Technologies 2022, 10, 5. [Google Scholar] [CrossRef]
- Ran, X.; Shan, Z.; Fang, Y.; Lin, C. An LSTM-Based Method with Attention Mechanism for Travel Time Prediction. Sensors 2019, 19, 861. [Google Scholar] [CrossRef] [PubMed]
- Ata, A.; Khan, M.A.; Abbas, S.; Khan, M.S.; Ahmad, G. Adaptive IoT empowered smart road traffic congestion control system using supervised machine learning algorithm. Comput. J. 2021, 64, 1672–1679. [Google Scholar] [CrossRef]
- Kashyap, A.A.; Raviraj, S.; Devarakonda, A.; Shamanth, R.N.K.; Santhosh, K.V.; Bhat, S.J.; Galatioto, F. Traffic flow prediction models—A review of deep learning techniques. Cogent Eng. 2022, 9, 2010510. [Google Scholar] [CrossRef]
- Zahid, M.; Chen, Y.; Jamal, A.; Mamadou, C.Z. Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability 2020, 12, 646. [Google Scholar] [CrossRef]
- Cornago, E.; Dimitropoulos, A.; Oueslati, W. Evaluating the Impact of Urban Road Pricing on the Use of Green Transport Modes. OECD Environ. Work. Pap. 2019. [Google Scholar] [CrossRef]
- Chin, A.T. Containing air pollution and traffic congestion: Transport policy and the environment in Singapore. Atmos. Environ. 1996, 30, 787–801. [Google Scholar] [CrossRef]
- Rosenlund, M.; Forastiere, F.; Stafoggia, M.; Porta, D.; Perucci, M.; Ranzi, A.; Nussio, F.; Perucci, C.A. Comparison of regression models with land-use and emissions data to predict the spatial distribution of traffic-related air pollution in Rome. J. Expo. Sci. Environ. Epidemiol. 2008, 18, 192–199. [Google Scholar] [CrossRef]
- Zhou, Q.; Chen, N.; Lin, S. FASTNN: A Deep Learning Approach for Traffic Flow Prediction Considering Spatiotemporal Features. Sensors 2022, 22, 6921. [Google Scholar] [CrossRef]
- Kumar, P.B.; Hariharan, K. Time Series Traffic Flow Prediction with Hyper-Parameter Optimized ARIMA Models for Intelligent Transportation System. J. Sci. Ind. Res. 2022, 81, 408–415. [Google Scholar]
- Yao, H.; Tang, X.; Wei, H.; Zheng, G.; Li, Z. Revisiting Spatial-Temporal Similarity: A Deep Learning Framework for Traffic Prediction. Proc. AAAI Conf. Artif. Intell. 2019, 33, 5668–5675. [Google Scholar] [CrossRef]
- Yin, X.; Wu, G.; Wei, J.; Shen, Y.; Qi, H.; Yin, B. Deep Learning on Traffic Prediction: Methods, Analysis, and Future Directions. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4927–4943. [Google Scholar] [CrossRef]
- Qi, Y.; Cheng, Z. Research on Traffic Congestion Forecast Based on Deep Learning. Information 2023, 14, 108. [Google Scholar] [CrossRef]
- George, S.; Santra, A.K. Traffic Prediction Using Multifaceted Techniques: A Survey. Wirel. Pers. Commun. 2020, 115, 1047–1106. [Google Scholar] [CrossRef]
- Xie, P.; Li, T.; Liu, J.; Du, S.; Yang, X.; Zhang, J. Urban flow prediction from spatiotemporal data using machine learning: A survey. Inf. Fusion 2020, 59, 1–12. [Google Scholar] [CrossRef]
- Chen, K.; Chen, F.; Lai, B.; Jin, Z.; Liu, Y.; Li, K.; Wei, L.; Wang, P.; Tang, Y.; Huang, J.; et al. Dynamic Spatio-Temporal Graph-Based CNNs for Traffic Flow Prediction. IEEE Access 2020, 8, 185136–185145. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Cho, J.; Yi, H. Spatial-temporal graph neural network for traffic forecasting: An overview and open research issues. Appl. Intell. 2022, 52, 2763–2774. [Google Scholar] [CrossRef]
- Guo, K.; Hu, Y.; Qian, Z.; Sun, Y.; Gao, J.; Yin, B. Dynamic Graph Convolution Network for Traffic Forecasting Based on Latent Network of Laplace Matrix Estimation. Trans. Intell. Transport. Syst. 2022, 23, 1009–1018. [Google Scholar] [CrossRef]
- Jiang, W.; Luo, J. Graph neural network for traffic forecasting: A survey. Expert Syst. Appl. 2022, 207, 117921. [Google Scholar] [CrossRef]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3848–3858. [Google Scholar] [CrossRef]
- Kalampokis, E.; Tambouris, E.; Tarabanis, K. A classification scheme for open government data: Towards linking decentralised data. Int. J. Web Eng. Technol. 2011, 6, 266–285. [Google Scholar] [CrossRef]
- Kalampokis, E.; Tambouris, E.; Tarabanis, K. Open government data: A stage model. In Proceedings of the Electronic Government: 10th IFIP WG 8.5 International Conference, EGOV 2011, Delft, The Netherlands, 28 August–2 September 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 235–246. [Google Scholar]
- Karamanou, A.; Kalampokis, E.; Tarabanis, K. Integrated statistical indicators from Scottish linked open government data. Data Brief 2023, 46, 108779. [Google Scholar] [CrossRef] [PubMed]
- Parliament, E. Directive (EU) 2019/1024 of the European Parliament and of the Council of 20 June 2019 on open data and the re-use of public sector information (recast). Off. J. Eur. Union 2019, 172, 56–83. [Google Scholar]
- Karamanou, A.; Brimos, P.; Kalampokis, E.; Tarabanis, K. Exploring the Quality of Dynamic Open Government Data Using Statistical and Machine Learning Methods. Sensors 2022, 22, 9684. [Google Scholar] [CrossRef] [PubMed]
- Teh, H.Y.; Kempa-Liehr, A.W.; Wang, K.I.K. Sensor data quality: A systematic review. J. Big Data 2020, 7, 11. [Google Scholar] [CrossRef]
- Mahrez, Z.; Sabir, E.; Badidi, E.; Saad, W.; Sadik, M. Smart Urban Mobility: When Mobility Systems Meet Smart Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6222–6239. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Golias, J.C.; Karlaftis, M.G. Short-term traffic forecasting: Overview of objectives and methods. Transp. Rev. 2004, 24, 533–557. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Ermagun, A.; Levinson, D. Spatiotemporal traffic forecasting: Review and proposed directions. Transp. Rev. 2018, 38, 786–814. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and Forecasting Vehicular Traffic Flow as a Seasonal ARIMA Process: Theoretical Basis and Empirical Results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef]
- Yao, Z.; Shao, C.; Gao, Y. Research on methods of short-term traffic forecasting based on support vector regression. J. Beijing Jiaotong Univ. 2006, 30, 19–22. [Google Scholar]
- Pang, X.; Wang, C.; Huang, G. A Short-Term Traffic Flow Forecasting Method Based on a Three-Layer K-Nearest Neighbor Non-Parametric Regression Algorithm. J. Transp. Technol. 2016, 06, 200–206. [Google Scholar] [CrossRef]
- Zhang, X.L.; He, G.; Lu, H. Short-term traffic flow forecasting based on K-nearest neighbors non-parametric regression. J. Syst. Eng. 2009, 24, 178–183. [Google Scholar]
- Sun, S.; Zhang, C.; Yu, G. A bayesian network approach to traffic flow forecasting. IEEE Trans. Intell. Transp. Syst. 2006, 7, 124–132. [Google Scholar] [CrossRef]
- Jozefowicz, R.; Zaremba, W.; Sutskever, I. An Empirical Exploration of Recurrent Network Architectures. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; Volume 37, pp. 2342–2350. [Google Scholar]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Fu, R.; Zhang, Z.; Li, L. Using LSTM and GRU neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 324–328. [Google Scholar] [CrossRef]
- Cui, Z.; Ke, R.; Pu, Z.; Wang, Y. Deep Bidirectional and Unidirectional LSTM Recurrent Neural Network for Network-wide Traffic Speed Prediction. arXiv 2018, arXiv:1801.02143. [Google Scholar]
- Yu, R.; Li, Y.; Shahabi, C.; Demiryurek, U.; Liu, Y. Deep learning: A generic approach for extreme condition traffic forecasting. In Proceedings of the 2017 SIAM international Conference on Data Mining, Houston, TX, USA, 27–29 April 2017; pp. 777–785. [Google Scholar] [CrossRef]
- Wu, Y.; Tan, H. Short-term traffic flow forecasting with spatial-temporal correlation in a hybrid deep learning framework. arXiv 2016, arXiv:1612.01022. [Google Scholar]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.k.; Woo, W.C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Advances in Neural Information Processing Systems; Cortes, C., Lawrence, N., Lee, D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 28. [Google Scholar]
- Yu, H.; Wu, Z.; Wang, S.; Wang, Y.; Ma, X. Spatiotemporal Recurrent Convolutional Networks for Traffic Prediction in Transportation Networks. Sensors 2017, 17, 1501. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A Comprehensive Survey on Graph Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4–24. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Li, J.; Chen, X.; Hovy, E.; Jurafsky, D. Visualizing and Understanding Neural Models in NLP. In Proceedings of the 2016 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, San Diego, CA, USA, 2–17 June 2016; pp. 681–691. [Google Scholar]
- Abdel-Hamid, O.; Mohamed, A.R.; Jiang, H.; Deng, L.; Penn, G.; Yu, D. Convolutional Neural Networks for Speech Recognition. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 1533–1545. [Google Scholar] [CrossRef]
- Bronstein, M.M.; Bruna, J.; LeCun, Y.; Szlam, A.; Vandergheynst, P. Geometric Deep Learning: Going beyond Euclidean data. IEEE Signal Process. Mag. 2017, 34, 18–42. [Google Scholar] [CrossRef]
- Qiu, J.; Tang, J.; Ma, H.; Dong, Y.; Wang, K.; Tang, J. DeepInf. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018. [Google Scholar] [CrossRef]
- Henrion, I.; Brehmer, J.; Bruna, J.; Cho, K.; Cranmer, K.; Louppe, G.; Rochette, G. Neural Message Passing for Jet Physics. In Proceedings of the Deep Learning for Physical Sciences Workshop, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Duvenaud, D.K.; Maclaurin, D.; Iparraguirre, J.; Bombarell, R.; Hirzel, T.; Aspuru-Guzik, A.; Adams, R.P. Convolutional Networks on Graphs for Learning Molecular Fingerprints. In Advances in Neural Information Processing Systems; Cortes, C., Lawrence, N., Lee, D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 28. [Google Scholar]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph wavenet for deep spatial-temporal graph modeling. In Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 1907–1913. [Google Scholar]
- Agafonov, A. Traffic Flow Prediction Using Graph Convolution Neural Networks. In Proceedings of the 2020 10th International Conference on Information Science and Technology (ICIST), Lecce, Italy, 4–5 June 2020; pp. 91–95. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, T.; Ren, Y.; Xie, K. A novel residual graph convolution deep learning model for short-term network-based traffic forecasting. Int. J. Geogr. Inf. Sci. 2020, 34, 969–995. [Google Scholar] [CrossRef]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph Attention Networks. In Proceedings of the International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence. International Joint Conferences on Artificial Intelligence Organization, Stockholm, Sweden, 13–19 July 2018. [Google Scholar] [CrossRef]
- Atwood, J.; Towsley, D. Diffusion-Convolutional Neural Networks. In Advances in Neural Information Processing Systems; Lee, D., Sugiyama, M., Luxburg, U., Guyon, I., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 29. [Google Scholar]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting. In Proceedings of the International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017. [Google Scholar]
- Liang, Y.; Ke, S.; Zhang, J.; Yi, X.; Zheng, Y. GeoMAN: Multi-level Attention Networks for Geo-sensory Time Series Prediction. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, IJCAI-18, Stockholm, Sweden, 13–19 July 2018; pp. 3428–3434. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention Based Spatial-Temporal Graph Convolutional Networks for Traffic Flow Forecasting. Proc. AAAI Conf. Artif. Intell. 2019, 33, 922–929. [Google Scholar] [CrossRef]
- Do, L.N.; Vu, H.L.; Vo, B.Q.; Liu, Z.; Phung, D. An effective spatial-temporal attention based neural network for traffic flow prediction. Transp. Res. Part C Emerg. Technol. 2019, 108, 12–28. [Google Scholar] [CrossRef]
- Yin, X.; Wu, G.; Wei, J.; Shen, Y.; Qi, H.; Yin, B. Multi-stage attention spatial-temporal graph networks for traffic prediction. Neurocomputing 2021, 428, 42–53. [Google Scholar] [CrossRef]
- Zheng, C.; Fan, X.; Wang, C.; Qi, J. GMAN: A Graph Multi-Attention Network for Traffic Prediction. Proc. AAAI Conf. Artif. Intell. 2020, 34, 1234–1241. [Google Scholar] [CrossRef]
- Bai, J.; Zhu, J.; Song, Y.; Zhao, L.; Hou, Z.; Du, R.; Li, H. A3T-GCN: Attention Temporal Graph Convolutional Network for Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2021, 10, 485. [Google Scholar] [CrossRef]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral networks and deep locally connected networks on graphs. In Proceedings of the 2nd International Conference on Learning Representations, ICLR 2014, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. In Proceedings of the International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017. [Google Scholar]
- Bachechi, C.; Rollo, F.; Po, L. Detection and classification of sensor anomalies for simulating urban traffic scenarios. Clust. Comput. 2022, 25, 2793–2817. [Google Scholar] [CrossRef]
- Wei, W.; Wu, H.; Ma, H. An autoencoder and LSTM-based traffic flow prediction method. Sensors 2019, 19, 2946. [Google Scholar] [CrossRef] [PubMed]
- Kuang, L.; Yan, X.; Tan, X.; Li, S.; Yang, X. Predicting taxi demand based on 3D convolutional neural network and multi-task learning. Remote Sens. 2019, 11, 1265. [Google Scholar] [CrossRef]
- Kalampokis, E.; Karacapilidis, N.; Tsakalidis, D.; Tarabanis, K. Artificial Intelligence and Blockchain Technologies in the Public Sector: A Research Projects Perspective. In Proceedings of the Electronic Government: 21st IFIP WG 8.5 International Conference, EGOV 2022, Linköping, Sweden, 6–8 September 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 323–335. [Google Scholar]
- Karamanou, A.; Kalampokis, E.; Tarabanis, K. Linked open government data to predict and explain house prices: The case of Scottish statistics portal. Big Data Res. 2022, 30, 100355. [Google Scholar] [CrossRef]





| TGCN | DCRNN | |
|---|---|---|
| Learning rate | 0.001 | 0.001 |
| Batch size | 50 | 50 |
| Epochs | 100 | 200 |
| GCN layer sizes (1st/2nd layer) | 64/10 | - |
| GRU layer sizes (1st/2nd layer) | 256/256 | 64/64 |
| max steps of random walks | - | 3 |
| Forecasting Horizon | Metric | HA | ARIMA | TGCN | DCRNN |
|---|---|---|---|---|---|
| 3 | RMSE | 757.58 | 534.51 | 222.2 | 244.58 |
| MAE | 556.35 | 466.47 | 125.12 | 151.10 | |
| MAPE | 7.06% | 4.33% | 3.98% | 6.39% | |
| 6 | RMSE | 757.58 | 582.33 | 260.42 | 331.04 |
| MAE | 556.35 | 501.13 | 146.73 | 212.52 | |
| MAPE | 7.06% | 7.02% | 3.96% | 7.664% | |
| 9 | RMSE | 757.58 | 690.12 | 267.88 | 398.31 |
| MAE | 556.35 | 589.98 | 156.06 | 263.54 | |
| MAPE | 7.06% | 6.98% | 4.01% | 7.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brimos, P.; Karamanou, A.; Kalampokis, E.; Tarabanis, K. Graph Neural Networks and Open-Government Data to Forecast Traffic Flow. Information 2023, 14, 228. https://doi.org/10.3390/info14040228
Brimos P, Karamanou A, Kalampokis E, Tarabanis K. Graph Neural Networks and Open-Government Data to Forecast Traffic Flow. Information. 2023; 14(4):228. https://doi.org/10.3390/info14040228
Chicago/Turabian StyleBrimos, Petros, Areti Karamanou, Evangelos Kalampokis, and Konstantinos Tarabanis. 2023. "Graph Neural Networks and Open-Government Data to Forecast Traffic Flow" Information 14, no. 4: 228. https://doi.org/10.3390/info14040228
APA StyleBrimos, P., Karamanou, A., Kalampokis, E., & Tarabanis, K. (2023). Graph Neural Networks and Open-Government Data to Forecast Traffic Flow. Information, 14(4), 228. https://doi.org/10.3390/info14040228