Abstract
In intelligent transportation systems, an important task is to provide a highly efficient communication channel between vehicles and other infrastructure objects that meets energy efficiency requirements and involves low time delays. The paper presents a method for generating synthetic data of the “vehicle-to-infrastructure” system, capable of simulating many scenarios of traffic situations to increase the generalizing ability of an intelligent beamsteering algorithm. The beamsteering algorithm is based on gradient boosting and is designed to connect and track vehicles with minimal delays without relying on GNSS coordinates. The predictors for the applied machine learning algorithm were: the relief, vehicle type, direction of movement and speed, timestamps, and the received signal power level. The generated dataset included the traffic model based on the Lighthill–Whitham–Richards macroscopic model and SUMO software package simulations. Simulation results showed 94% accuracy in correctly identified positions for the main lobe according to vehicle behavior.
1. Introduction
Despite significant advances in transportation infrastructure engineering and stricter traffic laws enforcement, the road safety problem remains unsolved. Poor visibility and slow driver reaction time are major contributing factors to the increase in traffic accidents (TA), especially for accidents involving vehicles and pedestrians or cyclists [1]. The intelligent transportation system (ITS) is a promising method to increase situational awareness of the driver or an autonomous vehicle, enabling highway infrastructure objects and road users to exchange heterogeneous information with each other [2]. It uses various machine learning algorithms to assess the probability of potential TA.
ITS implementation can be considered in several variations: within the systems of an ego car with only its sensor data and within the network of road users, where the vision of the traffic conditions is based on various sensor sets. Electronic stability control (ESC) is one of the conventional ITS applications [3] related to the concept of the ego-car system. Efficiency analysis of ESC in preventing accidents from 2011 to 2016 in the USA showed that single-vehicle crashes and head-on collisions related to loss of control reduced by about 40% and 13%, respectively [4,5], which illustrates the benefits of adaptation techniques for vehicle behavior based on situational road awareness. However, the functionality of these systems is limited to information from the vehicle itself. It does not take into account the peculiarities of the transport infrastructure and the behavior of other road users. In turn, the second type represents a comprehensive solution that provides interconnections between users in the road environment [6]. Such a unified technology of communication between vehicles and multiple objects (vehicle-to-everything, V2X) [7] includes various interaction scenarios between vehicles (vehicle-to-vehicle, V2V), vehicles and infrastructure (vehicle-to-infrastructure, V2I), and vehicles and pedestrians (vehicle-to-device, V2D, vehicle-to-pedestrian, V2P). Using such ITS can influence a significant number of factors, both in particular and in terms of effects on an overall increase in road safety.
Gigabit data rates and ultra-low latency are critical requirements of ITS applications [8], which is especially important for the second type of ITS with a large number of information sources. Unmanned vehicles with built-in radar and lidar are predicted to generate more than a gigabit per second of sensor data [9]. In this regard, such a system has two implementation challenges: the collection, systematization, and storing of information and establishing required delays and throughput capacity. The first problem could be solved using smart objects of infrastructure [10,11]. Within the V2I system, the infrastructure object can act as an informer of a priori information about the road section within its service area and act as an intermediary for data exchange between remote vehicles without connection through the V2V system. To solve the second problem, related to establishing and maintaining a high-speed channel, a significant part of research conducted is devoted to the beamsteering of the phased antenna arrays (PAA) technology [12,13] by concentrating the maximum radiated power in a limited area where the vehicle should be located.
The 3D beamsteering concept, where the radio beam is controlled both in the vertical and horizontal planes, enables the transmission of high-speed traffic [14]. However, for V2I systems, the range of which is at most 600 m [15], the arrangement of antennas for intelligent infrastructure objects occurs on road signs or road arch structures with appropriate suspension height standards. Consequently, the degrees of freedom for controlling the beam in the vertical plane become significantly less, which makes it possible to simplify the task to 2D beamsteering. Beamsteering only in the horizontal plane can be reduced to sectorization of the service area of the V2I base station (infrastructure transceiver) and the optimal service sector selection. In the well-known beamsteering algorithm of the 802.11ad [16] standard, the sector is selected based on the highest SNR at the subscriber’s reception. Such an approach requires several iterations of bidirectional frame transmission to evaluate the channel quality (channel state information, CSI); in practice, this leads to frequent sector changes, which reduces the link startup speed.
In this regard, a significant part of the current research concerns reducing the time to establish a connection, which is equivalent to reducing delays. Such a decrease can be achieved by positioning the vehicle based on information from its request message for connection to the network, which was demonstrated in [17]. In this research, the 802.11ad beamsteering technique was updated in the context of the V2I system by relying on vehicle location data. The technique reduces the number of iterations for establishing a link but for sectors relatively close to the infrastructure object. The scalability could be increased by storing load statistics of sectors, that is, by introducing a priori information about the V2I system. In [18], the vehicle’s initial position data within the 802.11ad standard was expressed in terms of GPS coordinates and speed. The drawbacks of the algorithm were the lack of accounting for positioning errors, the assumption of constant vehicle speed, and a rectilinear path. The insufficient number of visible satellites and multipath effects often limit the positioning accuracy of GPS trackers [19,20]. Hence, the application of an additional positioning system that is superior in accuracy to GNSS is essential for meeting a critical safety requirement in intelligent transportation systems. In this regard, dedicated short-range communications (DSRC) technology, in addition to GPS coordinates, uses MAP (specific for the DSRC message type) data representing statistical information on the physical geometry of the road section at the transceiver location [21]. The problem of the lack of the line-of-sight condition for GPS satellites when positioning the vehicle was taken into account in [22], where time of arrival (ToA) served as the location update information. When processing this information in conjunction with a video stream from road cameras, the algorithm has demonstrated an increase in positioning accuracy. However, the universality of the proposed approach is limited by the availability of video recording for all sections of the path, as well as by the features of the development, because multipath propagation needs to be taken into account when calculating ToA.
To date, algorithms based on machine learning (ML) have shown high levels of performance in solving tasks involving increasing positioning accuracy [23,24,25]. An ML algorithm, which controls the PAA, compares the received data from the vehicle request message with the required tilt angle of the radiation pattern (RP) main lobe, which should significantly reduce connection delays. The study [26] applied an intelligent algorithm that utilized vehicle frame requests in the 2.4/5 GHz band and estimated the direction of message transmission. A significant limitation of the proposed technique’s accuracy was the effect of the multipath propagation, primarily due to the peculiarity of the predictors’ choices. In [27], an offline deep reinforcement learning (offline-DRL) method with GPS coordinates and multipath pattern as input parameters was used for radio beam control and provided a probability of 3 dB power loss at the receiver input equal to . However, the research did not consider the required delays for the ML algorithm, which are critical for V2X application and should be at most tens of milliseconds [28], which. in the case of DRL, inevitably affects the accuracy.
In turn, not only the data supporting decision-making affects the efficiency of ML algorithms, but also the data on which they are trained [29]. For various tasks in V2X, there are several approaches to obtaining a dataset for training: using data from field experiments, including readings from actual sensors [30,31,32,33], using synthetic data obtained by simulating the V2X system [34,35,36,37], and a combination of the first two options to evaluate the performance of the algorithm consistently [22,38,39,40,41,42]. The data from actual sensors is an essential element of testing algorithms since it directly reflects the processes occurring in V2X networks, while their simulation will inevitably diverge from natural conditions. However, it is essential to remember that the frequency of emergencies is significantly lower than their absence [43]. Therefore, datasets of sensor data recorded in a specific period will contain only several representative examples, affecting the ML algorithm’s generalizing ability.
This paper presents an approach for learning an intelligent beamsteering algorithm based on synthetic vehicle-positioning data without relying on a GNSS system. The approach is universal, simulating various situations within the V2I network, including rarer events, increasing the ML algorithm’s generalizing ability, and considering a large number of factors to adequately match the natural conditions. Following [44], we used the obtained synthetic data to train the XGBoost algorithm to control the beamforming circuit of the PAA, aiming at channeling the power into the intended positioning area of the vehicle. The system operation results were demonstrated on a linear PAA simulation model with predetermined parameters. The ML algorithm was tested using the same environment, simulating traffic in a specific existing road section and wireless signal propagation. We estimated the algorithm performance as the probability of an incorrect choice of the vehicle’s location sector (that is, the probability of power loss at the receiver of more than 3 dB)
The paper is organized as follows: Section 2 introduces the beamsteering system concept and the simulation model of the PAA. Section 3 presents an approach for learning and testing an intelligent algorithm, including the dataset structure, the simulation model of the propagation environment, the traffic model, and the applied ML algorithm. Section 4 presents the results of training and testing the intelligent algorithm, while the conclusions are provided in Section 5.
2. Beamsteering System Concept and PAA’s Simulation Model
Current 3D beamsteering systems provide sufficient bandwidth for V2I data traffic, including video transmission for computer-vision applications, by forming a narrow beam that maximizes radiation in the user’s direction. To control the beam in the horizontal and vertical planes, planar multi-element PAAs are usually utilized. Changing the beam direction is performed by adjusting the amplitude-phase distribution between the PAA emitters based on a beamforming scheme (phase shifters, the Butler matrix, etc.). However, in the research, the beamsteering was reduced only to the horizontal plane, which can be implemented based on a linear PAA. Thus, the intended job of the ML algorithm is to select the required phase distribution between the emitters of the linear PAA according to the predicted azimuth of the vehicle location. Depending on the traffic intensity and road topology in the selected V2I service area, the linear PAA is replaced by a planar multi-element PAA to form a sufficient number of independent beams to connect all road users.
2.1. Beamsteering System Hardware
The beamsteering system hardware needed to implement the proposed approach (Figure 1) includes a controller and a beamforming circuit built on digital phase shifters connected to the linear PAA. The controller executes the ML algorithm based on a priori information and data from the received vehicle’s request message and manages the phase shifters by the eight-bit sequences encoding the required phase shift at the input of the PAA emitters. Due to the accurately determined phase shifts on the PAA elements, an RP is formed with the direction of the main lobe corresponding to the predicted sector of the vehicle location.
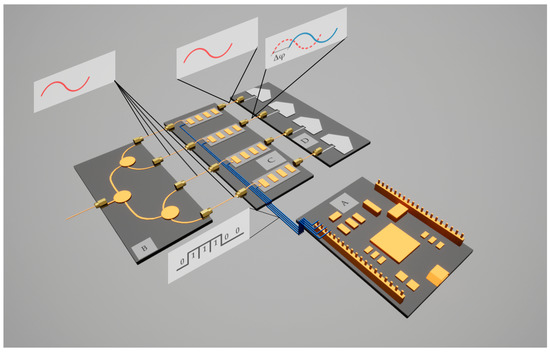
Figure 1.
Schematic of the beamsteering system. A—controller running the ML algorithm, B— microwave splitter, C—beamforming circuit, D—linear antenna array.
The goal function of the ML algorithm is to determine the vehicle location relative to the V2I transceiver at the road infrastructure object and maximize the signal power on the user receiver, as shown in Figure 2.
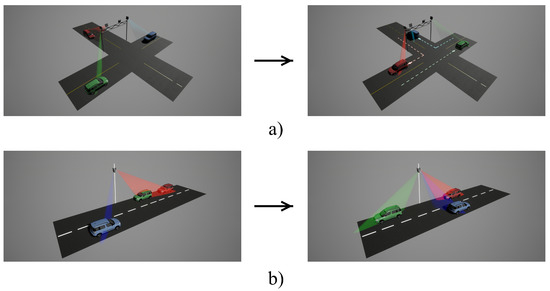
Figure 2.
Beamsteering scenarios: (a) crossroad coverage in four directions, (b) covering a longer section of the road.
To simplify the beamforming circuit and achieve 360-degree operation, it is proposed to divide the service area of the smart infrastructure object into four scanning zones. One PAA is required to maintain a connection in each zone. Thus, the foremost technical essential for the PAA is a 90-degree scanning sector. Thus, vehicle positioning becomes a classification task if we divide the scanning sector into sub-sectors with a width coinciding with the width of the main lobe. The sub-sector where the vehicle should be located was determined based on input data from road users and a priori information about the service area. The maximum range of the scanning sector is 600 m along the normal to the PAA’s plane [15]. When the vehicle approaches the border of the scanning sector, the service switches to the following PAA (Figure 2). The selected sub-sector (azimuth angle of the PAA’s main lobe) was converted into the phase distribution between emitters.
2.2. PAA Simulation Model
The PAA operation was simulated by relative amplitudes and phases. The array coefficient for the PAA was calculated with:
where is the complex weight of an emitter, is the wave number, d is the antenna array pitch, is the tilt angle of the main lobe, n is the number of emitters, and i is the imaginary unit. The RP was calculated as the square of the modulus of the array coefficient.
A correspondence between the sub-sector number, tilt angle , the required phase shift between emitters , and the eight-bit control code for the digital phase shifters is given in Table 1.

Table 1.
Encoding the sub-sector number in the eight-bit control code for the digital phase shifter.
The V2X PAA developed to solve the task posed in the study and presented in [45] was used to implement the simulation model. The parameters of the test PAA applied in the simulation:
- Length of the antenna array is 0.388 m;
- The antenna array pitch is mm;
- Number of emitters is 14;
- Scanning sector of the PAA in the horizontal plane is 45°;
- The main lobe width at half maximum in the horizontal plane is 9°.
The width of the main lobe was determined from the required time for the counter-emergency action of the driver in the case when the vehicle moves at a speed of 90 km/h in the direction perpendicular to the PAA’s normal. If we take the average radius of the service area to equal 300 m, then, taking into account the required braking time in icy conditions of 2 s [46], the braking distance will be an average of 50 m, which corresponds to a sub-sector width of 9°. As mentioned, the 360-degree operation requires four PAAs served by a single ML algorithm. Within the single PAA scanning sector, ten sub-sectors are allocated. The highest received signal’s power determines the leading PAA for each connection. Figure 3 demonstrates the RP’s shape corresponding to the generated binary control sequences.
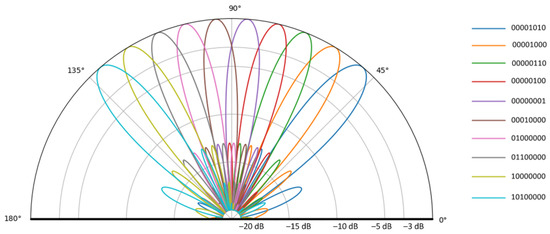
Figure 3.
The RP of the PAA for generated binary sequences controlling phase at the emitters inputs.
3. The Learning Approach of the Intelligent Algorithm
The method of generating synthetic data for learning, as well as synthesizing the environment for testing an intelligent algorithm, included two main stages: simulating the signal propagation environment using scripts developed in Python, and simulating road traffic using the open-source SUMO (Simulation of Urban Mobility) [47], designed to work with large road networks and various modes of transport. The data regarding the location and speed of the vehicle were input to the calculation of the signal power at the reception, in addition to a priori information about the terrain.
The data exchange between the vehicle and the smart infrastructure object is carried out to update knowledge about the traffic situation. Connection is initialized after receiving a request message from the vehicle containing the information presented in Section 3.1. Once connected, the vehicle provides the smart infrastructure with its ID, time mark of sending the message, GNSS data, if available, sensor data, and the IDs of nearby vehicles. The smart infrastructure object transmits to the vehicle data about its ID, the time mark of sending the message, GNSS data, corrected GNSS data on the vehicle position calculated by the ML algorithm, the sync label, weather data, IDs, and the coordinates of other vehicles in the service area.
3.1. Dataset Generation and Simulation of the Signal Propagation Environment
The positioning of vehicles and their classification by sub-sector is based on the data included in the request message. The intelligent algorithm is pre-trained before being put into operation using a model of the V2I system for a selected service area where the smart infrastructure object will be located. The ML algorithm executed on the V2I transceiver’s controller, taking into account a priori data, reveals the relationship between the vehicle sensors’ data and the received signal parameters and determines the road user location within the scanning sector. The ML algorithm must be trained on that environment model before being implemented in real-life conditions. If the road structure changes or new buildings arise in the service area, it is possible to introduce additional training for the algorithm based on new data from the vehicle. During training, the algorithm acted as an agent, providing the environment with location and vehicle-type data. As the response from the model, it received a matrix of terrain points under the vehicle and the signal power at the V2I control node transceiver.
During the beamsteering system deployment at the V2I control node, the proposed ML algorithm is retrained on the data received from the entities in the service area. In this regard, switching the system’s location is accompanied by retraining on the generated dataset for each new site of the V2I transmitter. The information contained in the request message includes vehicle type and speed (accelerometer data), gyroscopic sensor data (determines the relief features), timestamps and the signal level (determined by the distance to the user and the path profile). A priori data includes the coordinates of the V2I control node transceiver, a three-dimensional map of the service area, and road features in the service area (e.g., speed limit, route shape). These data were taken into account to design a model of the signal propagation environment in the service area. The simulated V2I system receives sensor parameters and the vehicle’s location based on the dynamic SUMO traffic model with selected frequency. The one proposed in [44] was chosen as the ML algorithm. At the same time, the data generation method proposed in the approach makes it possible to eliminate the disadvantage of the algorithm, which was the predominance of the received signal power for dividing the input space into disjunctive sub-sectors. This shortcoming negatively affected the efficiency of the system in conditions of multipath propagation. Including more information about the traffic stream and the road user with different behavior in the dataset would reduce the importance of this parameter and increase reliability.
An example of the dataset content is shown in the Table 2.
Table 2.
Examples of input data and their labels from the generated dataset.
To simulate the signal propagation within the service area of the V2I system, we applied the Longley–Rice irregular terrain model. It provides sufficient accuracy in predicting radio signal attenuation [48]. Multipath propagation was included in the simulation model based on the recommendations [49,50] for recalculating the signal level at the receiver of the smart infrastructure object and the vehicle. Moreover, it was upgraded with a program block considering the algorithm impact on the signal level at the vehicle’s receiver (comparing it with the target, when the maximum of radiation is precisely aimed at the user).
3.2. Traffic Model
The vehicle type (or rather its average speed) and the movement direction are not exhaustive information needed to anticipate the vehicle’s location since these do not consider the driving behavior on different road segments, for example, near crosswalks and curves, and the intensity of traffic. The software SUMO enables loading of the transport model of the selected highway segment, which considers its coordinates, the route’s geometry, traffic lanes, and speed limitations. SUMO also includes many configurable parameters whereby adjusting the ratio of vehicle types moving in the simulated area is possible. It can also manage the traffic stream, individual vehicle speed, the trajectories of movement, and traffic density and initiate non-standard vehicle behavior. SUMO is also an effective tool for testing V2X applications for proof of concept before field experiment [22].
The traffic intensity, in turn, affects the speed of all road users, creating a short-term trend in vehicle behavior, which affects the preemptive performance of the beamsteering system. To evaluate the sustainability of the designed system, we simulated various traffic situations based on the above parameters, which will be demonstrated in Section 3.
Since the SUMO application does not implement traffic intensity control directly, it was necessary to identify its dependence on adjustable parameters, such as the number of vehicles and their distribution over the area. The traffic intensity control was performed within the Lighthill–Whitham–Richards (LWR) macroscopic model [51], which assumes that there is a one-to-one relationship between speed and flow rate, and the Tanaka model [52], which is widely used in transport safety research tasks. With the above assumptions, we formulated the following equation:
where is the traffic stream rate, is the traffic density. For the following condition is valid:
Thus, the traffic intensity is denoted as:
To determine the dependence , the following calculations were performed for each lane where the speed cannot exceed the limits set at the site:
where is the safe distance between vehicles at a given speed , L is the average vehicle length, is the time that characterizes the driver’s reaction, and is the coefficient of the braking distance proportionality. , the average value for which was set as 1.1 s, may vary for individual vehicles or their group. depends on the pavement condition and can be determined from the guidebook data; in the simulation, it was set to 0.0285, corresponding to the normal state of asphalt. The parameter L was calculated based on the tabulated data [53]:
where is the safety distance between vehicles (assumed to be 2 m), is the average vehicle length (assumed 5 m), is the braking distance of the front and rear vehicle, and is the coefficient of adhesion to the road; in the simulation, the value for dry asphalt was set to 0.7.
3.3. ML Algorithm
When selecting an intelligent algorithm as the classifier, the main criteria were the algorithm’s accuracy value when dealing with an input data format that includes both numerical and categorical features, and the performance requirements in C-V2X systems [28]. Taking into account the requirements for delays from 10 ms to 1 ms for various 5G network applications and execution latency [54], the response time should not exceed fractions of milliseconds. As shown in [44], ensemble regression models [55] show the optimal combination of achievable accuracy and short response time when dealing with data of a similar nature to those presented in this paper, including the background of neural network algorithms. One of the dominant boosting structures today is eXtreme Gradient Boosting (XGBoost). In contrast to traditional gradient boosting, this algorithm predicts the optimal gradient of the model being added, which reduces the error at each iteration [56]. This is achieved by enumerating from the root of the tree all features and values of each feature and estimating each possible reduction in partitioning loss. Because of these advantages, which potentially improve prediction accuracy, this method was chosen. Learning hyperparameters of the XGBoost:
- Learning rate is 0.1.
- Number of iterations is 100.
- Booster (booster algorithm) is GBTree.
- Maximum depth of a tree is 11.
- Eval metric is Multiclass logloss.
The proposed ML algorithm was trained based on a dataset whose generation principles are described in Section 3.1.
4. Simulation and Results
We trained and tested the intelligent algorithm on an actual section of the track modeled in SUMO. Signal propagation simulation parameters:
- Terrain resolution is 4000 × 4000 dots.
- Serving area radius is 600 m.
- Infrastructure object coordinates are 34.765406 N, 113.650334 E.
- The height of the antenna suspension of the infrastructure object is 5 m.
The basic traffic simulation parameters in SUMO:
- The simulation steps number for all vehicles was 100.
- The average vehicles speed on the highway was 15.11 m/s.
- The cars and trucks ratio was 50/50%.
4.1. Learning ML Algorithm
An intersection on a two-level four-lane highway in Changzhou, China, near Zheng Zhou Shi Park (Figure 4) was selected as a learning and testing service area to evaluate the system’s sustainability. The V2I transceiver was assumed to be deployed on a frame road structure. The dataset contained a total of 12,680 examples, where 20% was allocated for a test set.
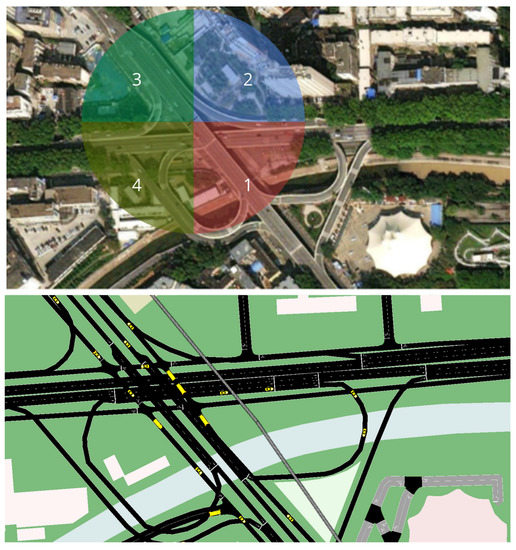
Figure 4.
Image of the selected service area (top), its digital model in SUMO (bottom), and beamsteering sectors (top, colour-marked; the sector’s index corresponds to the index of the serving PAA).
Figure 5 shows the accuracy of the ML algorithm represented by the error matrix. Following the results, the percentage of correctly identified classes from the total number of examples was 94% on the test set. Considering the complex multipath environment in the service area due to the building density, one can conclude that the system’s sustainability increased the compared results, where the proportion of correctly identified classes did not exceed 75%.
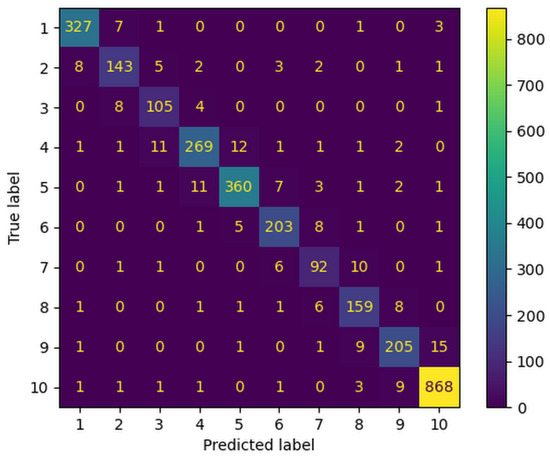
Figure 5.
Error matrix of ML algorithm operation on test data.
4.2. Testing ML Algorithm
In the next step, we estimated two performance parameters of the proposed approach: the probability of power loss at the receiver by more than 3 dB compared to the maximum achievable effective isotropic radiation power (EIRP), and the average deviation of the received signal level from the target for a range of traffic intensity values. In this regard, to evaluate the algorithm’s robustness to the non-standard behavior of drivers, such as increased reaction time to a traffic situation or driving in excess of the speed limit, the deviation was introduced into the traffic parameters for a certain number of vehicles at random time moments. A variety of scenarios of traffic situations were created by regulating the intensity of traffic and the probability of atypical vehicle behavior. In future work, the range of factors considered can be expanded, for example, by weather conditions that affect the coefficient of vehicle adhesion to the road. Table 3 shows the simulation results of the algorithm performance when beamsteering the PAA located at the V2I base station for an hour of traffic dynamics in the service area.
Table 3.
Simulation results of the algorithm performance.
It can be seen that the average value of the signal’s power deviations at the receiver input is always different from zero. This is due to the beam moving discretely between sub-sectors and uneven gain within the sub-sector provided by the shape of RP. At the fringe area between sub-sectors, the signal power decreases by 3 dB, which should be particularly considered for low traffic intensity when a vehicle moving at high speed enters the zone of low-quality service. However, when traffic is high, the atypical behavior of the vehicle has a more significant impact since the nature of its movement between the request message and the initialization of the connection can change significantly (for example, sudden acceleration, braking, or turning). In turn, the sudden acceleration in the case of low traffic intensity is more correlated with the data from the request message, leading to more minor errors in determining the vehicle’s location at the next moment in time. One way to level out this factor at high traffic intensity is to include examples of atypical vehicle behavior in the ML’s training set. The results showed a decrease in the average signal power at the vehicle’s receiver compared to [27] due to the above factors. However, at the same time, learning the ML algorithm according to the proposed approach makes it more relevant to natural conditions, especially in the case of road sections with high traffic intensity.
Another issue in the performed simulation is the applied coefficient of the car’s adhesion to the road, which was set to the case of dry asphalt. Hence, the application of the proposed algorithm is limited by the weather conditions. Deviation in the weather for a model can increase the frequency of non-standard vehicle behavior. It is possible to eliminate this limitation by training the ML algorithm on datasets under different weather conditions, obtaining several decision trees, and including a weather station [57,58] in the V2I base station to determine the switching moment and the type of trained tree.
In addition to atypical vehicle behavior, some introduced distortions are caused by the specifics of the phase shifters used in the simulation. Thus, the phase value at the input of the emitters calculated by the ML (Table 1) must be rounded up to a discrete value, which the phase shifter can output. We can propose several solutions to this problem. The first is to use planar PAA for more accurate emitter phase control, the second, to switch a beamforming circuit to analog phase shifters.
5. Conclusions
The universal approach proposed in the paper for learning an intelligent beamsteering algorithm based on vehicle positioning data without relying on GNSS increases the generalizing ability of the applied ML algorithm by simulating a variety of scenarios within the V2I network. The developed digital traffic model acted as a priori information for the ML algorithm, reducing the impact of the received signal’s power parameter on the system performance. It also increased the system’s robustness to multipath propagation. Moreover, the algorithm operation was demonstrated with the accurate PAA model to provide a more detailed simulation of beamsteering. The simulation results revealed that the percentage of correctly identified classes from the total number of examples was 94%, which is 19% more than the previous version. The probability of an incorrect choice of the vehicle’s location sub-sector (that is, the probability of power loss at the receiver by more than 3 dB) was also estimated. We identified two distortion factors that future work will aim to eliminate: low service areas at sub-sector boundaries and discrete phase-shifting applied in the simulation models.
Author Contributions
Conceptualization, E.L., E.G. and G.V.; methodology, E.L.; software, E.L. and A.A.; validation, E.L.; formal analysis, E.L., E.G. and G.V.; investigation, E.L. and A.A.; resources, E.L., E.G. and G.V.; data curation, E.L.; writing—original draft preparation, E.L.; writing—review and editing, E.G. and G.V.; visualization, E.L. and G.V.; supervision, E.G. and R.K.; project administration, E.G.; funding acquisition, E.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded under the grant of the Russian Science Foundation (Project №21-79-10407).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
A dataset for training the ML algorithm is available on request to the corresponding author’s e-mail.
Conflicts of Interest
The authors declare no conflict of interest.
Sample Availability
Not applicable.
References
- Habibovic, A.; Davidsson, J. Causation mechanisms in car-to-vulnerable road user crashes: Implications for active safety systems. Accid. Anal. Prev. 2012, 49, 493–500. [Google Scholar] [CrossRef]
- Figueiredo, L.; Jesus, I.; Tenreiro Machado, J.A.; Rui Ferreira, J.; Martins De Carvalho, J.L. Towards the development of intelligent transportation systems. In Proceedings of the ITSC 2001. 2001 IEEE Intelligent Transportation Systems. Proceedings (Cat. No. 01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 1206–1211. [Google Scholar] [CrossRef]
- Liebemann, E.; Meder, K.; Schuh, J.; Nenninger, G. Safety and performance enhancement: The Bosch electronic stability control (ESP). SAE Pap. 2004, 20004, 21-0060. [Google Scholar]
- Høye, A. The effects of Electronic Stability Control (ESC) on crashes—An update. Accid. Anal. Prev. 2011, 43, 1148–1159. [Google Scholar] [CrossRef]
- Öörni, R.; Luoma, J. Realised safety impacts of electronic stability control in Finland. IET Intell. Transp. Syst. 2017, 11, 158–163. [Google Scholar] [CrossRef]
- Hasan, K.F.; Wang, C.; Feng, Y.; Tian, Y.C. Time synchronization in vehicular ad-hoc networks: A survey on theory and practice. Veh. Commun. 2018, 14, 39–51. [Google Scholar] [CrossRef]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Agiwal, M.; Roy, A.; Saxena, N. Next generation 5G wireless networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2016, 18, 1617–1655. [Google Scholar] [CrossRef]
- Choi, J.; Va, V.; González-Prelcic, N.; Daniels, R.; Bhat, C.R.; Heath, R.W. Millimeter Wave Vehicular Communication to Support Massive Automotive Sensing. IEEE Commun. Mag. 2016, 54, 160–167. [Google Scholar] [CrossRef]
- Reus-Muns, G.; Salehi, B.; Roy, D.; Jian, T.; Wang, Z.; Dy, J.; Ioannidis, S.; Chowdhury, K. Deep Learning on Visual and Location Data for V2I mmWave Beamforming. In Proceedings of the 2021 17th International Conference on Mobility, Sensing and Networking (MSN), Exeter, UK, 13–15 December 2021; pp. 559–566. [Google Scholar] [CrossRef]
- Milanés, V.; Villagrá, J.; Godoy, J.; Simó, J.; Pérez, J.; Onieva, E. An Intelligent V2I—Based Traffic Management System. IEEE Trans. Intell. Transp. Syst. 2012, 13, 49–58. [Google Scholar] [CrossRef]
- Pallotta, A.; Roux, P.; Del Rio, D.; Sevillano, J.F.; Pirbazari, M.M.; Mazzanti, A.; Ermolov, V.; Lamminen, A.; Säily, J.; Frecassetti, M.; et al. SiGe:BiCMOS technology is enabling d-band link with active phased antenna array. In Proceedings of the Joint European Conference on Networks and Communications and 6G Summit, EuCNC/6G Summit 2021, Porto, Portugal, 8–11 June 2021; pp. 496–501. [Google Scholar] [CrossRef]
- Gu, X.; Liu, D.; Baks, C.; Tageman, O.; Sadhu, B.; Hallin, J.; Rexberg, L.; Parida, P.; Kwark, Y.; Valdes-Garcia, A. Development, Implementation, and Characterization of a 64-Element Dual-Polarized Phased-Array Antenna Module for 28-GHz High-Speed Data Communications. IEEE Trans. Microw. Theory Tech. 2019, 67, 2975–2984. [Google Scholar] [CrossRef]
- Halbauer, H.; Saur, S.; Koppenborg, J.; Hoek, C. 3D beamforming: Performance improvement for cellular networks. Bell Labs Tech. J. 2013, 18, 37–56. [Google Scholar] [CrossRef]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10419–10432. [Google Scholar] [CrossRef]
- IEEE Standard for Information Technology–Telecommunications and Information Exchange between Systems–Local and Metropolitan Area Networks–Specific Requirements-Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 3: Enhancements for Very High Throughput in the 60 GHz Band. IEEE Std 802.11ad-2012 (Amendment to IEEE Std 802.11-2012, as Amended by IEEE Std 802.11ae-2012 and IEEE Std 802.11aa-2012). 2012, pp. 1–628. Available online: https://ieeexplore.ieee.org/document/6392842 (accessed on 21 December 2022). [CrossRef]
- Mattos, M.; Rodrigues, A.; Meireles, R.; Aguiar, A. Geolocation-based sector selection for Vehicle-to-Infrastructure 802.11ad communication. Comput. Commun. 2022, 193, 224–233. [Google Scholar] [CrossRef]
- Va, V.; Shimizu, T.; Bansal, G.; Heath, R.W. Beam design for beam switching based millimeter wave vehicle-to-infrastructure communications. In Proceedings of the 2016 IEEE International Conference on Communications, ICC 2016, Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar] [CrossRef]
- Meguro, J.I.; Murata, T.; Takiguchi, J.I.; Amano, Y.; Hashizume, T. GPS multipath mitigation for urban area using omnidirectional infrared camera. IEEE Trans. Intell. Transp. Syst. 2009, 10, 22–30. [Google Scholar] [CrossRef]
- Cui, Y.J.; Ge, S.S. Autonomous vehicle positioning with GPS in urban canyon environments. Proc.-IEEE Int. Conf. Robot. Autom. 2001, 2, 1105–1110. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Agarwal, Y.; Jain, K.; Karabasoglu, O. Smart vehicle monitoring and assistance using cloud computing in vehicular Ad Hoc networks. Int. J. Transp. Sci. Technol. 2018, 7, 60–73. [Google Scholar] [CrossRef]
- Klautau, A.; Batista, P.; Gonzalez-Prelcic, N.; Wang, Y.; Heath, R.W. 5G MIMO data for machine learning: Application to beam-selection using deep learning. In Proceedings of the 2018 Information Theory and Applications Workshop (ITA 2018), San Diego, CA, USA, 11–16 February 2018. [Google Scholar] [CrossRef]
- Hu, Q.; Liu, Y.; Cai, Y.; Yu, G.; DIng, Z. Joint Deep Reinforcement Learning and Unfolding: Beam Selection and Precoding for mmWave Multiuser MIMO with Lens Arrays. IEEE J. Sel. Areas Commun. 2021, 39, 2289–2304. [Google Scholar] [CrossRef]
- Ma, W.; Qi, C.; Li, G.Y. Machine Learning for Beam Alignment in Millimeter Wave Massive MIMO. IEEE Wirel. Commun. Lett. 2020, 9, 875–878. [Google Scholar] [CrossRef]
- Nitsche, T.; Flores, A.B.; Knightly, E.W.; Widmer, J. Steering with eyes closed: Mm-Wave beam steering without in-band measurement. Proc.-IEEE INFOCOM 2015, 26, 2416–2424. [Google Scholar] [CrossRef]
- Va, V.; Choi, J.; Shimizu, T.; Bansal, G.; Heath, R.W. Inverse multipath fingerprinting for millimeter wave V2I beam alignment. IEEE Trans. Veh. Technol. 2018, 67, 4042–4058. [Google Scholar] [CrossRef]
- 5GAA. 5GAA P-190033: V2X Functional and Performance Test Report; Test Procedures and Results; 5GAA: Munich, Germany, 2019. [Google Scholar]
- Misra, R.; Grover, J. Sculpting Data for ML: The First Act of Machine Learning; University of California San Diego: La Jolla, CA, USA, 2021; p. 158. [Google Scholar]
- Varga, N.; Bokor, L.; Takacs, A.; Kovacs, J.; Virag, L. An architecture proposal for V2X communication-centric traffic light controller systems. In Proceedings of the 2017 15th International Conference on ITS Telecommunications (ITST 2017), Warsaw, Poland, 29–31 May 2017. [Google Scholar] [CrossRef]
- Radak, J.; Ducourthial, B.; Cherfaoui, V.; Bonnet, S. Detecting road events using distributed data fusion: Experimental evaluation for the icy roads case. IEEE Trans. Intell. Transp. Syst. 2016, 17, 184–194. [Google Scholar] [CrossRef]
- Ruta, M.; Scioscia, F.; Pinto, A.; Gramegna, F.; Ieva, S.; Loseto, G.; Sciascio, E.D. A CoAP-based framework for collaborative sensing in the Semantic Web of Things. Procedia Comput. Sci. 2017, 109, 1047–1052. [Google Scholar] [CrossRef]
- Scholliers, J.; Jutila, M.; Valta, M.; Kauvo, K.; Virtanen, A.; Pyykönen, P. Co-operative Traffic Solutions for Hybrid Communication Environments. Transp. Res. Procedia 2016, 14, 4542–4551. [Google Scholar] [CrossRef]
- Shagdar, O.; Muhlethaler, P. Study on merging control supported by IEEE 802.11p systems for highway environments. In Proceedings of the 2013 IFIP Wireless Days (WD), Valencia, Spain, 13–15 November 2013. [Google Scholar] [CrossRef]
- Ghandour, A.J.; Fawaz, K.; Artail, H.; Di Felice, M.; Bononi, L. Improving vehicular safety message delivery through the implementation of a cognitive vehicular network. Ad Hoc Netw. 2013, 11, 2408–2422. [Google Scholar] [CrossRef]
- Khabbaz, M.; Assi, C.; Hasna, M.; Ghrayeb, A.; Fawaz, W. Modelling, analysis and performance improvement of an SRU’s access request queue in multi-channel V2I communications. Pervasive Mob. Comput. 2015, 21, 92–102. [Google Scholar] [CrossRef]
- Sadou, M.; Bouallouche-Medjkoune, L. Efficient message delivery in hybrid sensor and vehicular networks based on mathematical linear programming. Comput. Electr. Eng. 2017, 64, 496–505. [Google Scholar] [CrossRef]
- Shao, C.; Leng, S.; Zhang, Y.; Fu, H. A multi-priority supported medium access control in Vehicular Ad Hoc Networks. Comput. Commun. 2014, 39, 11–21. [Google Scholar] [CrossRef]
- Durech, J.; Hrubos, M.; Franekova, M.; Janota, A. Implementation of data from the mobile measurement platform to VANET application. In Proceedings of the 10th International Conference (ELEKTRO 2014), Rajecke Teplice, Slovakia, 19–20 May 2014; pp. 430–434. [Google Scholar] [CrossRef]
- Zagrouba, R.; Hayouni, H.; Kamoun, F. Handover optimization within vehicular networks. In Proceedings of the 2014 World Congress on Computer Applications and Information Systems (WCCAIS 2014), Hammamet, Tunisia, 17–19 January 2014. [Google Scholar] [CrossRef]
- Johansson, I.; Jin, J.; Ma, X.; Pettersson, H. Look-ahead speed planning for heavy-duty vehicle platoons using traffic information. Transp. Res. Procedia 2017, 22, 561–569. [Google Scholar] [CrossRef]
- He, Z.; Zhang, D. Cost-efficient traffic-aware data collection protocol in VANET. Ad Hoc Netw. 2017, 55, 28–39. [Google Scholar] [CrossRef]
- Ronza, A.; Félez, S.; Darbra, R.M.; Carol, S.; Vílchez, J.A.; Casal, J. Predicting the frequency of accidents in port areas by developing event trees from historical analysis. J. Loss Prev. Process. Ind. 2003, 16, 551–560. [Google Scholar] [CrossRef]
- Lopukhova, E.A.; Grakhova, E.P.; Voronkov, G.S.; Kutluyarov, R.V. Gradient Boosting Algorithms Application for Beamsteering in V2X Systems. In Proceedings of the 2022 IEEE 23rd International Conference of Young Professionals in Electron Devices and Materials (EDM), Altai, Russia, 30 June–4 July 2022; pp. 195–199. [Google Scholar] [CrossRef]
- Ishmiyarov, A.A.; Kutluyarov, R.V.; Grakhova, E.P.; Voronkov, G.S. Microstrip Emitter Design for Application in V2X Beamsteering Systems. In Proceedings of the 2022 IEEE 23rd International Conference of Young Professionals in Electron Devices and Materials (EDM), Altai, Russia, 30 June–4 July 2022; pp. 279–284. [Google Scholar] [CrossRef]
- Abdi Kordani, A.; Rahmani, O.; Abdollahzadeh Nasiri, A.S.; Boroomandrad, S.M. Effect of Adverse Weather Conditions on Vehicle Braking Distance of Highways. Civ. Eng. J. 2018, 4, 46. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P.; Wiebner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Oughton, E.; Russell, T.; Johnson, J.; Yardim, C.; Kusuma, J. itmlogic: The Irregular Terrain Model by Longley and Rice. J. Open Source Softw. 2020, 5, 2266. [Google Scholar] [CrossRef]
- P.2001: A General Purpose Wide-Range Terrestrial Propagation Model in the Frequency Range 30 MHz to 50 GHz. 2021. Available online: https://www.itu.int/rec/R-REC-P.2001/en (accessed on 21 December 2022).
- P.1411-11. Propagation Data and Prediction Methods for the Planning of Short-Range Outdoor Radiocommunication Systems and Radio Local Area Networks in the Frequency Range 300 MHz to 100 GHz. 2021. Available online: https://www.itu.int/rec/R-REC-P.1411/en (accessed on 21 December 2022).
- Treiber, M.; Kesting, A. The Lighthill–Whitham–Richards Model. In Traffic Flow Dynamics; Springer: Berlin, Germany, 2013; pp. 81–126. [Google Scholar] [CrossRef]
- Gartner, N.H.; Messer, C.J.; Rathi, A.K. (Eds.) Traffic Flow Theory: A State-of-the-Art Report; Transportation Research Board: Washington, DC, USA, 2001. [Google Scholar]
- Fricke, L.B. Traffic Accident Reconstruction (The Traffic Accident Investigation Manual, Vol. 2) 1990 First Edition; Northwestern University Center for Public: Evanston, IL, USA, 1990. [Google Scholar]
- Parvez, I.; Rahmati, A.; Guvenc, I.; Sarwat, A.I.; Dai, H. A survey on low latency towards 5G: RAN, core network and caching solutions. IEEE Commun. Surv. Tutor. 2018, 20, 3098–3130. [Google Scholar] [CrossRef]
- Friedman, J.H. Stochastic gradient boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; pp. 785–794. [Google Scholar] [CrossRef]
- Tahir, M.N.; Leviäkangas, P.; Katz, M. Connected Vehicles: V2V and V2I Road Weather and Traffic Communication Using Cellular Technologies. Sensors 2022, 22, 1142. [Google Scholar] [CrossRef] [PubMed]
- Ojanperä, T.; Kutila, M.; Pyykönen, P.; Scholliers, J.; Sukuvaara, T.; Mäenpää, K.; Huuskonen, O. Development and Piloting of Novel 5G-Enabled Road Safety Services. In Proceedings of the IEEE Wireless Communications and Networking Conference Workshop (WCNCW), Marrakech, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).