Abstract
The co-channel interference for mobile users (MUs) of a public safety network (PSN) in the co-existence of heterogeneous networks such as unmanned aerial vehicles (UAVs) and LTE-based railway networks (LRNs) needs a thorough investigation, where UAVs are deployed as mobile base stations (BSs) for cell-edge coverage enhancement. Moreover, the LRN is employed for the train, and its control signal demands high reliability and low latency. It is necessary to provide higher priority to LRN users when allocating resources from shared radio access channels (RACs). By considering both sharing and non-sharing of RACs, co-channel interference was analyzed in the downlink network of the PSN, UAV, and LRN. By offloading more PSN MUs to the LRN or UAVs, the resource utilization of the LRN and UAV BSs was enhanced. In this paper, we aimed to adopt deep-learning (DL)-based enhanced inter-cell interference coordination (eICIC) and further enhanced ICIC (FeICIC) strategies to deal with the interference from the PSN to the LRN and UAVs. Moreover, a DL-based coordinated multipoint (CoMP) for coordinated scheduling technique was utilized along with FeICIC and eICIC to enhance the performance of PSN MUs. In the simulation results, the performance of DL-based interference management was compared with simple eICI, FeICIC, and coordinated scheduling CoMP. The DL-based FeICIC and CoMP for coordinated scheduling performed best with shared RACs.
1. Introduction
Emergency rescue teams and public safety networks (PSNs) are in charge of establishing secure surroundings and executing mission-critical responsibilities, such as acknowledging possible disasters resulting from either human or natural causes. Emergency medical care, firefighting, police departments, and emergency police are among the emergency relief services. PSNs play a crucial role in protecting the public, businesses, and the state’s infrastructure during fires, terrorist attacks, and ecological disasters [1].
In contrast to traditional phone services, PSN mobile users (MUs) provide voice conversations in an effective way under very rigorous guidelines. The need for high-reliability, low-latency connections to establish digital sharing, streaming video, and video calls are rising in PSNs. For instance, giving the central unit real-time video streaming will empower the PSN to precisely evaluate the situation and dispatch sufficient information to handle the calamity and minimize possible fatalities. PSNs currently use land mobile radio and conventional narrowband communication technologies, which may provide reliable voice communications, but cannot support broadband transmission and often have a restricted range of compatibility and coverage [2]. To protect human lives, and avoid criminal activities and terrorism, emergency professionals across the nation may converse and exchange important voice communications, videos, and data using PSN communication [3].
The introduction of unmanned aerial vehicles (UAVs), such as tiny drones, balloons, or gliders, enables ubiquitous broadband access and possesses the significant potential to alter PSN technology [4]. UAVs have been able to find a variety of significant uses as a result of recent technical advancements, shrinking, and open-source technology efforts [5,6]. Moreover, UAVs are a possible solution for civil services, including emergency preparedness, sporting activities, and traffic monitoring. Due to this, UAVs have garnered attention from both academics and businesses in recent years. Furthermore, UAVs can function as airborne/flying base stations (BSs) when equipped with base station hardware, with a coverage area provided by aerial cells. Hence, UAVs within range of the PSN are desirable as they cover the edge PSN MUs during emergencies.
The use of UAVs as hovering BSs can significantly increase the capabilities of mobile networks [7] by utilizing line-of-sight (LoS) connections at various altitudes and the adaptability of UAV deployment at preferred places [8]. Moreover, UAVs are adapted for efficient transport, which provides network connectivity to ground users and maximizes the flight time of UAVs. Additionally, for the secure transportation of people and valuables, the BSs of Long-Term Evolution railway networks (LRNs) generate communication with railways on the railroad. As a result, the security and safety of trains depend on the reliability of the LRN. In addition to providing reliable links for trains, the LRN is also utilized to give connectivity to PSN MUs residing close to the LRN.
Deep learning (DL), the industry standard for machine learning, has produced outstanding results in several fields. Researchers in networking are also starting to understand the value and power of DL and investigating its usage to address issues in the field of mobile networking. It makes sense to use DL for beyond-5G wireless and mobile networks. To estimate the desired output, raw data signals are transferred from the input layers up to the final output layer, and prediction errors are transported from the output node all the way back to the hidden layer in the end-to-end DL model. DL has the ability to automatically learn features, which is why users are free from manually creating and extracting features [9].
The co-channel interference caused by the presence of heterogeneous networks is the main problem for 700 MHz systems. Cooperative communications techniques such as coordinated multipoint (CoMP) and dynamic inter-cell interference coordination (ICIC) can be used to solve this interference issue and improve network performance. The transmission points (BSs and UAVs) in a CoMP cooperating set can work together to coordinate scheduling and data transmissions to reduce interfering signals and increase the MU signal-to-interference-plus-noise ratio (SINR), particularly at cell boundaries. In Rel. 8 of 3GPP LTE, ICIC was introduced, allowing users located at the center to use the full range of resource blocks. However, for users who are located at the cell edge, the two neighboring BSs are not permitted to utilize the same group of resource blocks. Downlink CoMP in Rel. 10 of 3GPP LTE refers to the coordination of several cells.
Motivation and Contribution
Monitoring and controlling the plethora of network components have become impossible due to the rising complexity and diversity of mobile network topologies. Therefore, there is great scientific interest in integrating adaptable intelligent DL into future mobile networks. This trend is mirrored in interconnected systems that enable machine-learning techniques. DL makes it possible to systematically extract significant data from traffic and automatically identify connections that would otherwise become too complicated to process by humans. Since 5G is frequently compiled for diverse purposes and shows intricate relationships in a heterogeneous network, co-channel interference becomes too challenging for a typical heterogeneous network.
Therefore, there is an immense need to develop an efficient co-channel interference strategy algorithm to achieve reliable MU assignments where the PSN, UAVs, and LRN are concurrently employed. The main contributions of this paper are summarized below:
- We analyzed scenarios with and without sharing of the RAC, where, firstly, the advantages of RAC sharing are examined in the co-existence of three networks. However, the LRN user is always given more priority when allocating resources as the railroad signal requires more stable connectivity and low latency.
- To cope with co-channel interference, DL-based enhanced ICIC (eICIC), further eICIC (FeICIC), and coordinated scheduling CoMP techniques were utilized for the coexisting PSN, UAVs, and LRN.
The rest of the paper is organized as follows. In Section 2, the related work is represented. In Section 3, we demonstrate the system model to examine co-channel interference. In Section 4, the proposed scheme for minimizing co-channel interference using DL-based eICIC, FeICCI, and coordinated scheduling CoMP is presented. In Section 5, the simulation results are given to show the improved performance of the proposed technique. Finally, Section 6 concludes this paper.
2. Related Work
Future wireless systems [10] are considered to have UAV-assisted communication because they can supplement their terrestrial architecture with flying BSs. Moreover, it is necessary to consider several challenges, including system modeling for resource management and optimization, to build viable UAV-aided cellular networks [11]. The authors proposed a heterogeneous wireless network to address the communication requirements of a UAV-assisted PSN in a disaster. The authors of [10] modified the optimum transportation model for UAVs to allow them to provide network connectivity to ground users while optimizing their flight time. The researchers of [12] also suggested an effective UAV BS that could coexist with a traditional network. For a radio link connection at a difficult-to-deploy site, UAVs can augment traditional small BSs and offer cost-effective and low-power alternatives. As an example, the authors in [13] handled a combined position and user connecting issue by using UAVs rather than terrestrial BSs. The authors in [14] used the circular packing theory for the UAV deployment to achieve maximum user coverage. According to the authors in [15], UAVs are utilized for transferring power to a sensor network in an Internet of Things (IoT) network.
The authors in [16] presented a point-processing-based 3D UAV deployment that took advantage of UAVs with multiple antennas to connect to ground users. The authors in [17] suggested scattering UAVs with a 3D layout while keeping networks at a safe distance. Additionally, UAVs are advantageous when there is a problem in connectivity that might occasionally occur in busy places such as concerts or festivals. A technological difficulty that has not been addressed in earlier research [18,19] is the potential to increase power utilization in UAV-assisted cellular connections by leveraging the chances for energy collection. By extending the air time of UAVs, it may offer cellular customers service for a significantly longer time by using energy harvesting [20,21,22].
Considering the coexistence of UAV networks with a next-generation mobile infrastructure to offer various services is a crucial topic. UAVs can establish links in a disaster-stricken region with good planning, which is the basis for their deployment with a PSN in the future. Here, radio frequency planning aids in determining the number of drones needed for coverage, the best altitude to fly at, and the maximum user rates. If UAVs are to be employed in inhabited areas, determining the route loss that signals encounter is considered a crucial problem. Although drones are intended to function as agents for quickly reconstructing communication links, proper channel characterization may be analytically costly and time-consuming [23,24].
The majority of earlier efforts on the LRN and UAVs’ network had to do with channel model analysis using a straightforward railway network topology [9,25,26]. There are a number of issues that need to be rectified as a result of the coexistence of more than two networks, such as co-channel interference and service priority. Therefore, co-channel interference management research is desperately needed with significant interest. The co-channel interference problem has been addressed using a variety of strategies in the literature, such as interference alignment and channel diagonalization using a two-step precoder procedure for the power control mechanism [27], multi-user CoMP [28], and 3GPP LTE-A having interference management [29]. It has been observed that, among all the previously suggested methods, BS collaboration offers the greatest gains in terms of fairness, quality of service (QoS), and load balancing, at the expense of a small increase in feedback complexity in terms of communicating channel state information (CSI).
In the study [26], the authors used coordinated scheduling CoMP, eICIC, and FeICIC as part of the RAC sharing scenario to offload additional PSN users to the LRN. However, coordinated scheduling CoMP was only considered among the LRN BSs. In this research, the authors examined coordinated scheduling CoMP and dynamic ICIC as potential choices for interference control for the coexisting LRN, UAVs, and PSN. Some studies have looked at the issue of managing radio resources, including schemes for interference-aware resource sharing [30], collaborative scheduling [31], and game-based resource allocation [32]. However, they mainly concentrated on maximizing system throughput and efficiency. When allocating resources, they failed to consider user priorities and disregarded the needs of users for mission-critical services.
Most of the previous works also summarized in Table 1 used co-channel interference management and BS coordination schemes such as coordinated scheduling CoMP, eICIC, and FeICIC. However, in this paper, machine learning (DL) was utilized to predict user assignment. Along with using interference management and BS coordination schemes, user priorities and the task of MU assignment were performed. The DL method in the proposed scheme takes the CSI, QoS, and data rate and learns the system to provide an optimum user assignment to either the LRN, UAVs, or PSN.

Table 1.
Literature.
3. System Model
A system model considers a one-tier implementation of a PSN BS, four LRN BSs, and two UAVs that overlap with the network’s central location (center of interest), as shown in Figure 1. The inter-site spacing was 4 km for PSNs and 1 km for the LRN, respectively, whereas the UAVs were deployed at cell edges to cover the edge users. Each PSN BS had three sectors to aid transmission, whereas the LRN had two sectors. Each side of the track of the railway was lined with LRN BSs. In this paper, an LTE downlink infrastructure for the co-existence of the PSN–LRN and PSN–UAVs were considered. All BSs of the PSN, LRN, and UAVs utilized the same system bandwidth. Physical resource blocks were assigned to each MU in the time and frequency grid.
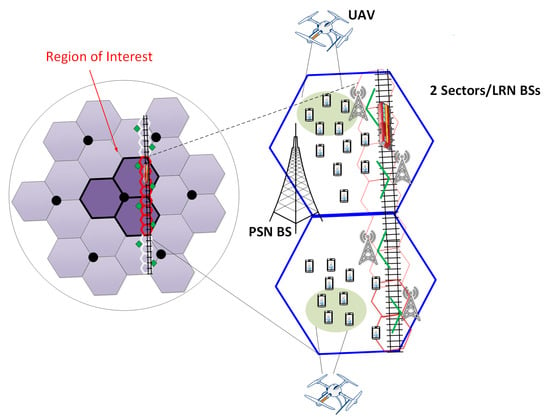
Figure 1.
Co-existence of the PSN, LRN, and UAVs.
The SINR of each MU that participated in the interference management schemes is given below:
where is the SNR of each MU utilized in the interference management techniques and is the power received by each MU from the specific BS after adopting channel characteristics such as path loss, fading, and antenna gain. Moreover, is additive Gaussian noise, and is the interference.
The data rate that was achieved by each MU while using the interference management techniques is calculated as
where B is the bandwidth for the MU covered by interference coordination.
Using M UAVs with a hexagonal sector and N LRN BS sites made up of hexagonal sectors , an R-tier PSN was installed that coexisted with the LRN and UAVs using L PSN BS sites composed of K hexagonal sectors within each site. Moreover, S is equal to the total number of UAV, LRN, and PSN units . All MUs are referred to as U, such as PSN MU and LRN user , and the PSN, LRN, and UAVs BSs are referred to as .
The K-tier deployment’s area of interest is the principal place for the PSN, while other regions generate interference. According to Figure 1, the area of interest included 2 UAVs, 4 LRN BSs, and 1 BS for the PSN. The MUs of the PSN were scattered uniformly at random throughout the target region for each sector. Therefore, it was likely that some MUs would be close to the LRN BSs. PSN MUs can be connected to LRN BSs through active wireless channel sharing. Next, we will talk about the trade-offs involved in switching between sharing and non-sharing a RAC. The following general equation was used to determine the path loss to each link:
where represents the antenna gain, is a link’s path loss, stands for shadowing, and presents the fading of the channel. The rural macro model of the 3GPP standards was considered when assessing path loss. The macro route loss model, which was created to use a frequency range equal to 700 MHz, is stated as follows:
where H is the height of the BS antenna, represents the distance from the BS to the MUs, and is the frequency. The shadowing caused by obstructions between MUs and BSs was modeled using a log-normal distribution and an inter-site correlation coefficient equal to 0.5. The rapid signal level changes in multipath communication are characterized by fast fading. In this study, fast fading was generated for PSN MUs and high-speed train users with high mobility using the D1 and D2a models (offered by Winner II), respectively. The vertical v and horizontal h trims of the 3D antenna designs for the BS are calculated as follows [33]:
The 3D radiations related to an antenna are represented by the 3D antenna patterns, which also explain the antenna’s 3D radiation characteristics. For this reason, using the 3D antenna is preferred to present the 3D performance of the antenna for this specific application.
Practical traffic models were used to mimic typical traffic and its congestion circumstances. Depending on the employed software, including voice-over-IP (VoIP) and video, users can be classified. For this study, we assumed that modeling of traffic at the user level must be applied as an LTE standard. The following is the generic proportionately fair scheduler equation:
where represents the instantaneous data rate and represents the average data rate. The objective was to constantly provide the LRN user with the prioritized resources first since the downlink communication of an LRN control signal necessitates more reliable connectivity and low latency.
4. Problem Formulation
In this paper, our main goal was to combine the eICIC, coordinated scheduling CoMP, and FeICIC to increase coverage with minimum channel impact while staying within the constraints of the data rate and average BS transmit power. Therefore, the optimization strategy is described as
where the minimal throughput of an MU is determined by the maximum power consumption threshold and channel effects.
5. Proposed DL-Based Interference Control Technique
As shown in Figure 1, cooperative communication solutions were used, such as coordinated scheduling CoMP using eICIC and FeICIC, to evaluate interference for the present public safety, UAV, and railway networks. In this respect, the UAV, railway, and public safety systems were classified into various circumstances and assessed for each one’s efficacy. Below are the descriptions and details of the situations.
5.1. Situation 1: UAVs, LRN, and PSN without RAC Sharing
PSN MUs cannot access the LRN BS or UAV when connecting to the public safety network. This is similar to macrocells and femtocells that may coexist with closed subscriber subgroups when the low-power nodes only allow a certain number of MUs to access the network. If the LRN/UAV BS is located close to the PSN BS, there is a critical co-channel interference. This is because of the limited coverage of LRN/UAV BSs that have high-power nodes along the track. For the PSN, the MU is also in the LRN/UAV network’s center coverage and is receiving a relatively low-power intended signal. Moreover, the interference intensity from the LRN/UAV BS is high for the MU towards the edge of PSN coverage.
The power setting for the eICIC/FeICIC schemes was designed to shield the PSN MUs located near the closed subscriber group LRN/UAVs by minimizing the transmit power of the LRN/UAVs. LRN/UAVs BSs are low-power access points and are generally deployed by users for limited service standards, offering the small cells with lower priority. Therefore, reducing the LRN/UAVs BS transmission power makes it logical to protect PSN MUs. However, operators have set up high-power nodes for the UAV, LRN, and PSN. In a case where radio access network sharing is not allowed, reducing the power of LRN BSs will also harm the network’s reliability and cause service disruptions, rendering the eICIC/FeICIC schemes useless.
5.2. Situation 2: UAVs, LRN, and PSN with RAC Sharing
Instead of being sources of excessive interference, LRN BS/UAVs might be viewed as BSs to increase coverage at the cell boundaries of the PSN through active RAC sharing. In an RAC sharing environment, PSN MUs can attach to LRN BSs/UAVs, which reduces co-channel interference and increases the LRN BS/UAVs’ resource consumption. Since the LRN MU travels along the track and generally receives greater power from LRN BSs, the PSN does not need to provide RAC sharing for LRN users. This paper considered sharing the LRN/UAV RAC by PSN MUs.
In the RAC sharing scenario, predefined scheduling constraints were considered. The LRN MU must receive the best resources since its downlink transmission requires minimal latency and high reliability. As a result, high priority to the LRN MU is given when allocating resources to meet the needs of the LRN’s mission-critical service, while PSN BSs use proportionate fair scheduling to schedule their MUs.
5.3. Situation 3: FeICIC/eICIC UAVs, LRN, and PSN without RAC Sharing with Coordinated Scheduling CoMP
In this case, effective interference mitigation solutions are offered, which will improve the reliability and throughput of the PSN MU’s performance and the quality of the LRN user link. The co-existing UAV, LRN, and PSN comprise a novel heterogeneous network with overlapping PSNs. Given the difference in cell sizes and the ability of LRN BSs/UAVs to unload PSN MUs via RAC sharing, this situation is comparable to the heterogeneous network configuration of macrocells and picocells. Here, MUs can connect with all kinds of BSs, and pico-BSs with lower coverage are destined to unload macro-MUs.
Although there is a main difference between the two situations, PSN MUs may be found everywhere and act as normal users. In contrast, LRN users move along a track placed along LRN BSs and UAVs stationed at the cell edges. To target this situation with RAC sharing and minimize the interference from PSN BSs to the LRN/UAV network, the time domain eICIC, and FeICIC approaches were employed. The surrounding LRN BSs often cause more interference to the LRN user present along the track than the PSN BSs. To lessen this interference, the nearby LRN BSs may explore coordinated scheduling CoMP.
To avoid interference from LRN/UAVs BSs, no data are transmitted from the PSN BS during absolute blank subframes (ABSs) for eICIC. Moreover, FeICIC facilitates data transmission for center PSN MUs during power-reduced ABSs, with moderate user interference from LRN BSs and UAVs. However, the sole beneficiaries of the deployment of ABS/reduced-power ABS will be cell-edge users of LRN BSs and UAVs. Cell range extension can also be used to avoid interference for the PSN MUs, which are subject to severe interference from LRN/UAVs BSs. Applying a heavy bias to the received signal-reduced power of LRN/UAVs BSs to offload subsequently becomes beneficial for ABSs/reduced-power ABSs.
When the PSN BSs’ load increases, the network allows more PSN MUs to be offloaded to small BSs (LRN or UAVs), whereas the remaining PSN MUs having a more satisfactory channel quality are supported by PSN BSs. In such a situation, the offloaded MUs will experience less co-channel interference from the PSN BSs. To minimize interference among dispersed MUs, an ABS/reduced-power ABS was employed.
In the non-RAC sharing scenario, coordinated scheduling CoMP is considered for the PSN, UAVs, and LRN BSs. To avoid interference with the demands of LRN users’ mission-critical service, the aggressor BSs muffle their physical resource blocks with the assistance of the CoMP sites. However, LRN customers are given a higher priority when resources are allocated. Coordinated scheduling CoMP is used between PSN and LRN BSs, PSN and PSN BSs, PSN and UAVs, UAVs and UAVs BSs, and LRN and LRN BSs.
5.4. Situation 4: DL-Based FeICIC/eICIC UAVs, LRN, and PSN without RAC Sharing with Coordinated Scheduling CoMP
To satisfy the QoS and data rate requirements, a DL-based MU assignment is necessary. Input nodes take the CSI, maximum throughput, etc., process them through the hidden nodes, and output the MU assignment. A special input characteristic of the recommended DL structure is produced by combining the QoS, CSI, and maximum throughput, as shown in Figure 2. The proposed DL technique uses any feed-forward architecture, such as fully linked layers. We attempted to approximate the uncertain RAC-sharing computation technique using the DNN. After performing the MU assignment, we employed eICIC, and FeICIC, and coordinated scheduling CoMP to further reduce the co-channel interference.
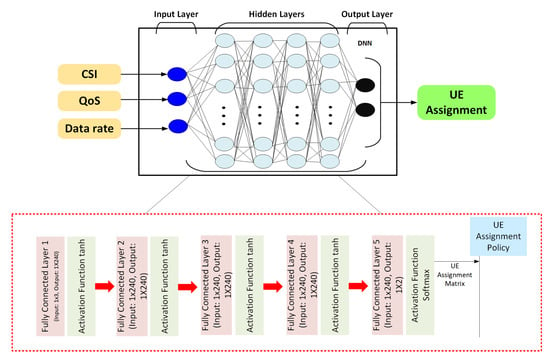
Figure 2.
DL algorithm for user assignment to the PSN, LRN, and UAVs.
By consciously allocating users to BS, the DNN creates an output vector. The output layer activation must be carefully designed to consistently deliver an adequate solution that fulfills the power restriction shown in (a) and the efficiency constraint shown in (b). As there are more BS antennas and users, there are more factors to anticipate. Therefore, the technique should avoid the overfitting issue with subpar performance. A DNN was examined that creates low-dimensional transitional variables, which are crucial in creating the optimum beamforming solution to address the overfitting problem. The DNN output layer changes depending on the training sample and uses a scaling softmax method to obtain a usable user matrix. After learning, the DNN outputs the user’s assignment matrix, where softmax is used as the final activation function.
We considered three input states, i.e., QoS, throughput, and CSI, where the MU acts as an agent. The action space is defined as the probability that the MU is assigned to a specific base station. The objective function is to assign the MU to a base station (BSs or UAVs) while minimizing the channel effects and considering the constraints of the data rate and power. The input data are passed through the fully connected hidden network. The first layer in the hidden layers, which have four fully connected layers and generate 240 values from three input matrices, utilizes the tangent hyperbolic nonlinear activation. The 1st, 2nd, and 3rd layers employ a nonlinear activation (tangent hyperbolic), whereas the fourth and final levels employ softmax as the activation function. The output layer produces approximate MU assignment matrices.
6. Simulation Results
This section evaluates the proposed scheme’s performance with communication situations having various co-existing LRN and PSN scenarios. System-level simulations (SLSs) were performed using the one-tier PSN coexistence with an LRN/UAV network to validate the analysis of the co-channel interference under various scenarios. Additionally, this work employed practical traffic models rather than the complete buffer scenario. For public safety users, two forms of communication were considered: video was 20%, and VoIP was 80%; the transmission of the LRN control signals was assumed to be VoIP traffic.
Users of PSNs were dispersed throughout the region of concern equitably and randomly. Even though just one LRN user was anticipated, only a few PSN MUs may enter the LRN BS area. This section compares the simulation outcomes for several concurrent PSN, UAVS, and LRN system scenarios. RAC sharing and non-RAC sharing were compared to demonstrate the advantages, whereas we adopted RAC sharing among the three networks. The effectiveness of cases involving an LRN network coexisting with a PSN was evaluated.
The simulation parameter is given as the carrier frequency (DL), equal to 778 MHz; the bandwidth for PSN BSs, LRN BSs, and UAVs was 10 MHz; the number of physical resources blocks was 50; the resource block bandwidth was 180 KHz; a number of PSN MUs was 40, whereas there was 1 LRN MU; the noise spectral density was equal to −174 dBm/Hz; the rural macro (3GPP TR 36.837) was used as a path loss model; the log-normal distribution was used as the shadowing; the fast fading was generated using Winner II (D1—rural macro); the traffic models PSN users: video (20%); VoIP (80%).
Splitting the dataset, adjusting the hyperparameters, and performing batch normalization were all steps in the model training process for DL. It was necessary to divide the data gathered for training into three distinct sets: training, validation, and testing. The complete dataset can make up to 75% of the training set. The training set served as the basis for the model’s learning; in other words, it was utilized to determine the model’s weights and biases, whereas 15% and 20% of data were utilized for validation and testing, respectively. DL helps to assess initial accuracy, observe how the model learns, and adjust the hyperparameters. In order to modify the data and align all of the data points on the same scale in advance of the training, two procedures, normalization and standardization, were used. The numerical data are often scaled down from 0 to 1 as part of the normalization procedure. On the other hand, standardization often entails removing the dataset’s mean from each data point and then dividing the result by the dataset’s standard deviation. In order to avoid this, the standardized data must have a mean of 0 and a standard deviation equal to 1. Normalization and standardization are two terms that refer to the same process of putting data on a defined or uniform scale.
The efficiency of the MU throughput at 50% of the complete distributing mechanism is compared in Figure 3 under the conditions of CDF. The comparison in Figure 3 demonstrates unequivocally that at 50% of CDF, the sharing RAC scenario outperformed the non-sharing one. From all the potential outcomes, a coordinated scheduling CoMP with RAC sharing, eICIC, and FeICIC was the best-case scenario. When using eICIC and FeICIC, the user throughput performance became better. Therefore, eICIC, FeICIC, and coordinated scheduling CoMP showed the result with a small variance. A few of these situations were affected by interference. However, the DL-based method with coordinated scheduling CoMP with RAC sharing outperformed all other cases, as can be seen in the MU throughput graph.
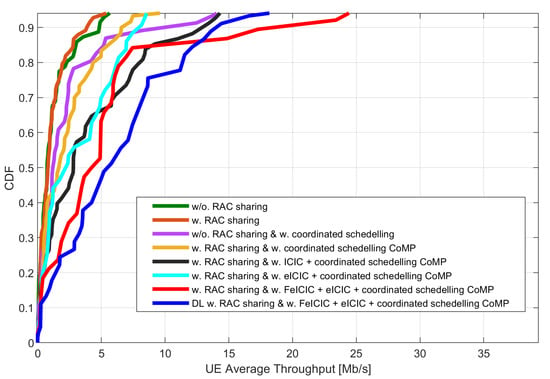
Figure 3.
User’s average throughput vs. CDF.
Accordingly, when the user throughput was 5 Mb/s, the CDF for MUs with RAC sharing, MUs without RAC sharing, MUs without RAC sharing and with coordinated scheduling CoMP, MUs with RAC sharing and with coordinated scheduling CoMP, MUs with RAC sharing with coordinated scheduling CoMP and with ICIC, MUs with RAC sharing with coordinated scheduling CoMP and with eICIC, MUs with RAC sharing with FeICIC, eICIC, and coordinated scheduling CoMP, and MUs with RAC sharing DL with FeICIC, eICIC, and coordinated scheduling CoMP was 0.98, 0.9, 0.82, 0.814, 0.7, 0.67, 0.59, and 0.48, respectively.
Figure 4 displays a plot of the SINR threshold and outage probability. The outage probability can be calculated as:
where is the SINR threshold. Moreover, shows that users are not considered to exist in the outage.
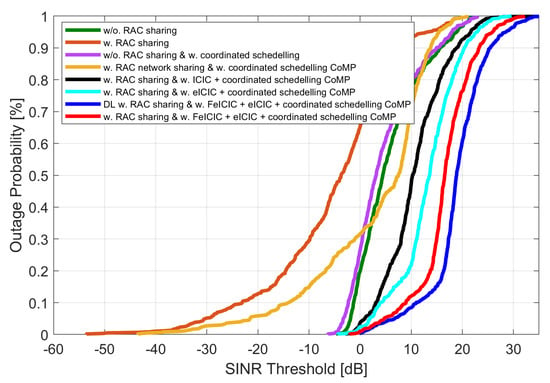
Figure 4.
Outage probability vs. SINR threshold.
The proposed DL technique outperformed the other interference avoidance techniques. The SINR values were lower in the absence of RAC sharing than in the presence of it because there was less interference. However, the DL with coordinated scheduling CoMP, eICIC, and FeICIC with RAC sharing outperformed all other situations, as can be seen in the MU throughput graph. Accordingly, when the SNR threshold was 0 dB, the CDF for MUs with RAC sharing, MUs without RAC sharing, MUs without RAC sharing and with coordinated scheduling CoMP, MUs with RAC sharing, and with coordinated scheduling CoMP, MUs with RAC sharing with coordinated scheduling CoMP and with ICIC, MUs with RAC sharing with coordinated scheduling CoMP and with eICIC, MUs with RAC sharing with FeICIC, eICIC, and coordinated scheduling CoMP, and MUs with RAC sharing DL with FeICIC, eICIC, and coordinated scheduling CoMP was 0.2, 0.66, 0.3, 0.35, 0.07, 0.06, 0.05, and 0.1, respectively.
Accordingly, where −70 dBm is the interference threshold, the CDF for MUs with RAC sharing, MUs without RAC sharing, MUs without RAC sharing and with coordinated scheduling CoMP, MUs with RAC sharing and with coordinated scheduling CoMP, MUs with RAC sharing with coordinated scheduling CoMP and with ICIC, MUs with RAC sharing with coordinated scheduling CoMP and with eICIC, MUs with RAC sharing with FeICIC, eICIC, and coordinated scheduling CoMP, and MUs with RAC sharing DL with FeICIC, eICIC and coordinated scheduling CoMP was 0.98, 0.486, 0.6, 0.35, 0.67, 0.76, 0.79, and 0.85, respectively, as shown in Figure 5.
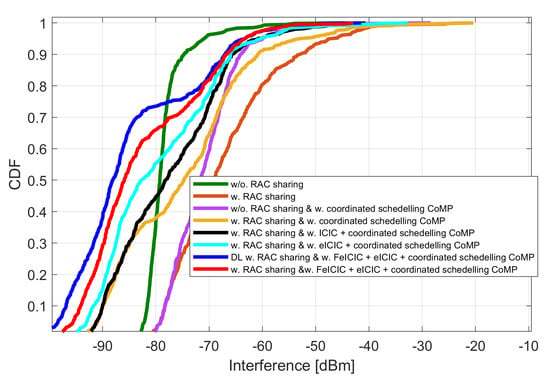
Figure 5.
Interference vs. CDF.
7. Conclusions
This paper utilized cooperative interference coordinating approaches to demonstrate co-channel interference assessment for the coexisting PSN, LRN, and UAVs. To the best of our knowledge, this study of the co-existence of the UAVs, LRN, and PSN is the first research to address the resource allocation issue using the DL technique. RAC sharing was used to provide a high capacity and improved channel conditions when three networks coexist. Due to RAC sharing, there should be some modifications: the other BS does not allocate the exact same resources that have already been allocated to the PSN MU when using CoMP. We developed a collaboration based on user QoS preferences that utilize the available spectrum resources efficiently. Utilizing RAC sharing and coordinated scheduling CoMP, eICIC, and FeICIC technologies, the data rate requirements of a beyond-5G or 6G network were met while keeping the power consumption of the wireless infrastructure within bearable bounds. Additionally, to meet the increasing expectations of users, we determined the most recent advances and the areas that need uniformity. Future research and cutting-edge technology will also significantly alter how people and PSN agencies carry out their everyday operations.
Given that heterogeneous networks are an essential component of today’s high-speed communication system, there is much potential for the future. For more effective, efficient, and high-speed wireless communication, new technology such as neural-network-based beamforming designing algorithms can be created.
Author Contributions
Conceptualization, I.A. and S.H.; methodology, A.A., M.M. and S.H.; formal analysis, S.N.M., H.M. and I.A.; resources, M.M., S.N.M. and H.M.; writing—original draft preparation, A.H.A., I.A. and A.A.; writing—review and editing, Z.A.R.; supervision, A.H.A.; project administration, A.A., M.M., A.H.A. and H.M.; funding acquisition, M.M. and H.M. All authors have read and agreed to the published version of the manuscript.
Funding
Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2023R137), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Acknowledgments
Marey acknowledges the support of Prince Sultan University.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Baldini, G.; Karanasios, S.; Allen, D.; Vergari, F. Survey of wireless communication technologies for public safety. IEEE Commun. Surv. Tutor. 2014, 2, 619–641. [Google Scholar] [CrossRef]
- United States Government Accountability Office. Emergency communications: Various Challenges Likely to Slow Implementation of a Public Safety Broadband Network. In Report to Congressional Requesters; 2012. Available online: https://www.gao.gov/products/gao-12-343 (accessed on 1 January 2023).
- FCC. ch. 16: Public safety. In National Broadband Plan; 2010. Available online: https://www.morganlewis.com/pubs/2010/03/fcc-releases-national-broadband-plan-public-safety-recommendations (accessed on 1 January 2023).
- Johnson, N.B. Are drones and robots the future of public safety? In Report to Congressional Requesters; 2010. Available online: https://statetechmagazine.com/article/2014/06/are-drones-and-robots-future-public-safety (accessed on 1 January 2023).
- Beard, R.W.; McLain, T.W.; Nelson, D.B.; Kingston, D.; Johanson, D. Decentralized cooperative aerial surveillance using fixedwing miniature UAVs. IEEE 2006, 7, 1306–1324. [Google Scholar] [CrossRef]
- Ouamri, M.A.; Alkanhel, R.; Gueguen, C.; Alohali, M.A.; Ghoneim, S.S.M. Modeling and analysis of uav-assisted mobile network with imperfect beam alignment. Comput. Mater. Contin. 2023, 74, 453–467. [Google Scholar] [CrossRef]
- Chen, J.; Gesbert, D. Optimal positioning of flying relays for wireless networks: A LOS map approach. In Proceedings of the IEEE International Conference on Computer and Communications (ICC), Chengdu, China, 13–16 December 2017; pp. 1–6. [Google Scholar]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 6, 1207–1210. [Google Scholar] [CrossRef]
- Choetkiertikul, M.; Dam, H.K.; Tran, T.; Pham, T.; Menzies, T. A Deep Learning Model for Estimating Story Points. IEEE Trans. Softw. Eng. 2019, 45, 637–656. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 3, 134–142. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 3, 2334–2360. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Wireless communication using unmanned aerial vehicles (UAVs): Optimal transport theory for hover time optimization. IEEE Trans. Wirel. Commun. 2017, 12, 8052–8066. [Google Scholar] [CrossRef]
- Khoshkholgh, M.G.; Navaie, K.; Yanikomeroglu, H.; Leung, V.C.M.; Shin, K.G. Coverage performance of aerial-terrestrial HetNets. In Proceedings of the IEEE Vehicular Technology Conference (VTC), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Plachy, J.; Becvar, Z.; Mach, P.; Marik, R.; Vondra, M. Joint positioning of flying base stations and association of users: Evolutionary based approach. IEEE Access 2019, 7, 11454–11463. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 8, 1647–1650. [Google Scholar] [CrossRef]
- Cetinkaya, O.; Merrett, G.V. Efficient deployment of UAV-powered sensors for optimal coverage and connectivity. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; Volume 8, pp. 1–6. [Google Scholar]
- Liu, C.-H.; Liang, D.-C.; Syed, M.A.; Gau, R.-H. A 3D tractable model for UAV-enabled cellular networks with multiple antennas. IEEE Trans. Wirel. Commun. 2021, 10, 3538–3554. [Google Scholar] [CrossRef]
- Zhu, Y.; Zheng, G.; Fitch, M. Secrecy rate analysis of UAV-enabled mmWave networks using Matérn hardcore point processes. IEEE J. Sel. Areas Commun. 2018, 7, 1397–1409. [Google Scholar] [CrossRef]
- Sami, M.; Daigle, J.N. User association and power control for UAVenabled cellular networks. IEEE Wireless Commun. Lett. 2020, 9, 267–270. [Google Scholar] [CrossRef]
- Chang, Z.; Guo, W.; Guo, X.; Ristaniemi, T. Machine learning-based resource allocation for multi-UAV communications system. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Yang, Z.; Pan, C.; Wang, K.; Shikh-Bahaei, M. Energy efficient resource allocation in UAV-enabled mobile edge computing networks. IEEE Trans. Wirel. Commun. 2019, 9, 4576–4589. [Google Scholar] [CrossRef]
- Koulali, S.; Sabir, E.; Taleb, T.; Azizi, M. A green strategic activity scheduling for UAV networks: A sub-modular game perspective. IEEE Commun. Mag. 2016, 5, 58–64. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, Y.; Zhang, R. Spectrum and energy efficiency maximization in UAV-enabled mobile relaying. In Proceedings of the IEEE International Conference on Communications (ICC), Chengdu, China, 13–16 December 2017; pp. 1–6. [Google Scholar]
- Zhang, L.; Zhao, Z.; Wu, Q.; Zhao, H.; Xu, H.; Wu, X. Energy-aware dynamic resource allocation in UAV assisted mobile edge computing over social Internet of vehicles. IEEE Access 2018, 6, 56700–56715. [Google Scholar] [CrossRef]
- Guan, K.; Zhong, Z.; Ai, B. Assessment of LTE-R using high speed railway channel model. In Proceedings of the 3rd International Conference on Communications and Mobile Computing, Qingdao, China, 18–20 April 2011; pp. 461–464. [Google Scholar]
- Ahmad, I.; Kaleem, Z.; Chang, K. QoS priority based femtocell user power control for interference mitigation in 3GPP LTE-A HetNet. J. Korean Inst. Commun. Inf. Sci. 2014, 39, 61–74. [Google Scholar] [CrossRef]
- Xu, D.; Ren, P.; Sun, L.; Song, H. Precoder-and-receiver design scheme for multi-user coordinated multi-point in LTE-A and fifth generation systems. IET Commun. 2016, 10, 292–299. [Google Scholar] [CrossRef]
- Tao, C.; Qiu, J.; Chen, H.; Yu, L.; Dong, W.; Yuan, Y. Position-based modeling for wireless channel on high-speed railway under a viaduct at 2.35 GHz. IEEE J. Sel. Areas Commun. 2012, 30, 834–845. [Google Scholar]
- Ali, M. An overview on interference management in 3GPP LTE-advanced heterogeneous networks. Int. J. Future Generat. Commun. Netw. 2015, 1, 55–68. [Google Scholar] [CrossRef]
- Li, Y.; Kaleem, Z.; Chang, K.H. Interference-aware resourcesharing scheme for multiple D2D group communications underlying cellular networks. Wirel. Pers. Commun. 2016, 2, 749–768. [Google Scholar] [CrossRef]
- Wang, F.; Song, L.; Han, Z.; Zhao, Q.; Wang, X. Joint scheduling and resource allocation for device-to-device underlay communication. In Proceedings of the IEEE Wireless Communications and Networking Conference, Shanghai, China, 7–10 April 2013; pp. 134–139. [Google Scholar]
- Wei, W.; Fan, X.; Song, H.; Fan, X.; Yang, J. Imperfect information dynamic Stackelberg game based resource allocation using hidden Markov for cloud computing. IEEE Trans. Serv. Comput. 2016, 11, 78–89. [Google Scholar] [CrossRef]
- 3GPP TS 36.104, “Evolved Universal Terrestrial Radio Access (E-UTRA); Base Station (BS) Radio Transmission and Reception (Release 10),” TS 26.104 v10.11.0. 2013. Available online: https://www.etsi.org/deliver/etsi_ts/136100_136199/136104/11.04.00_60/ts_136104v110400p.pdf (accessed on 1 January 2023).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).