
Integrated Attack Tree in Residual Risk Management Framework



Abstract
:1. Introduction
- Definition of steps for applying the proposed residual cybersecurity risk management framework.
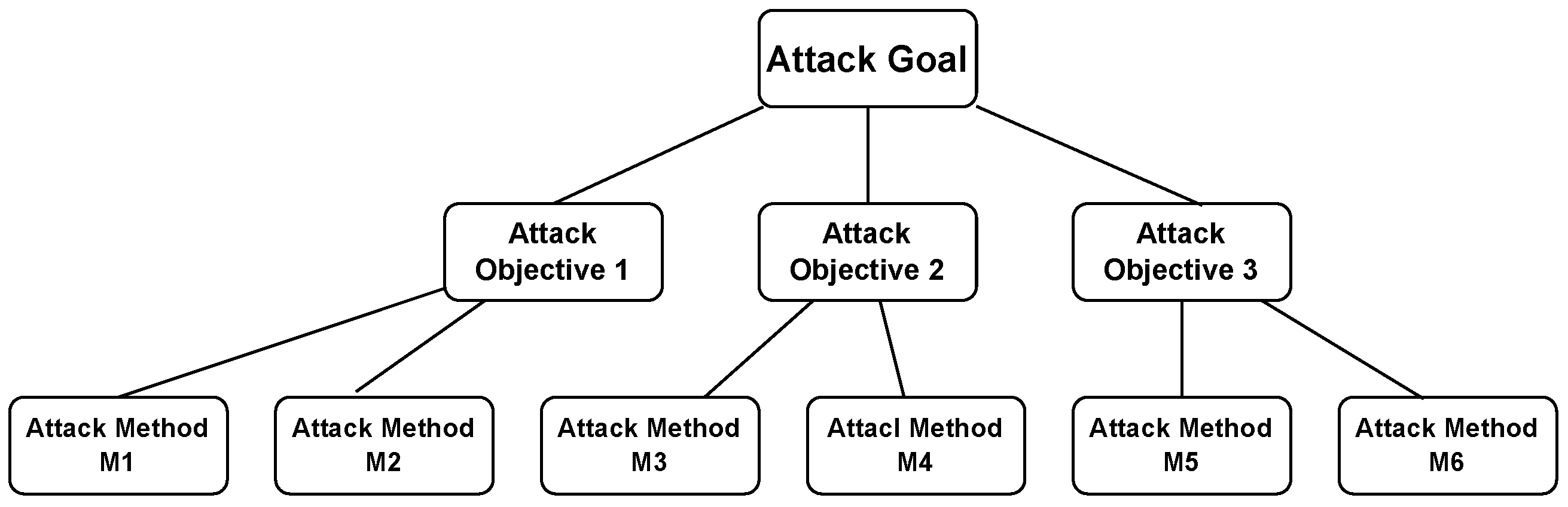
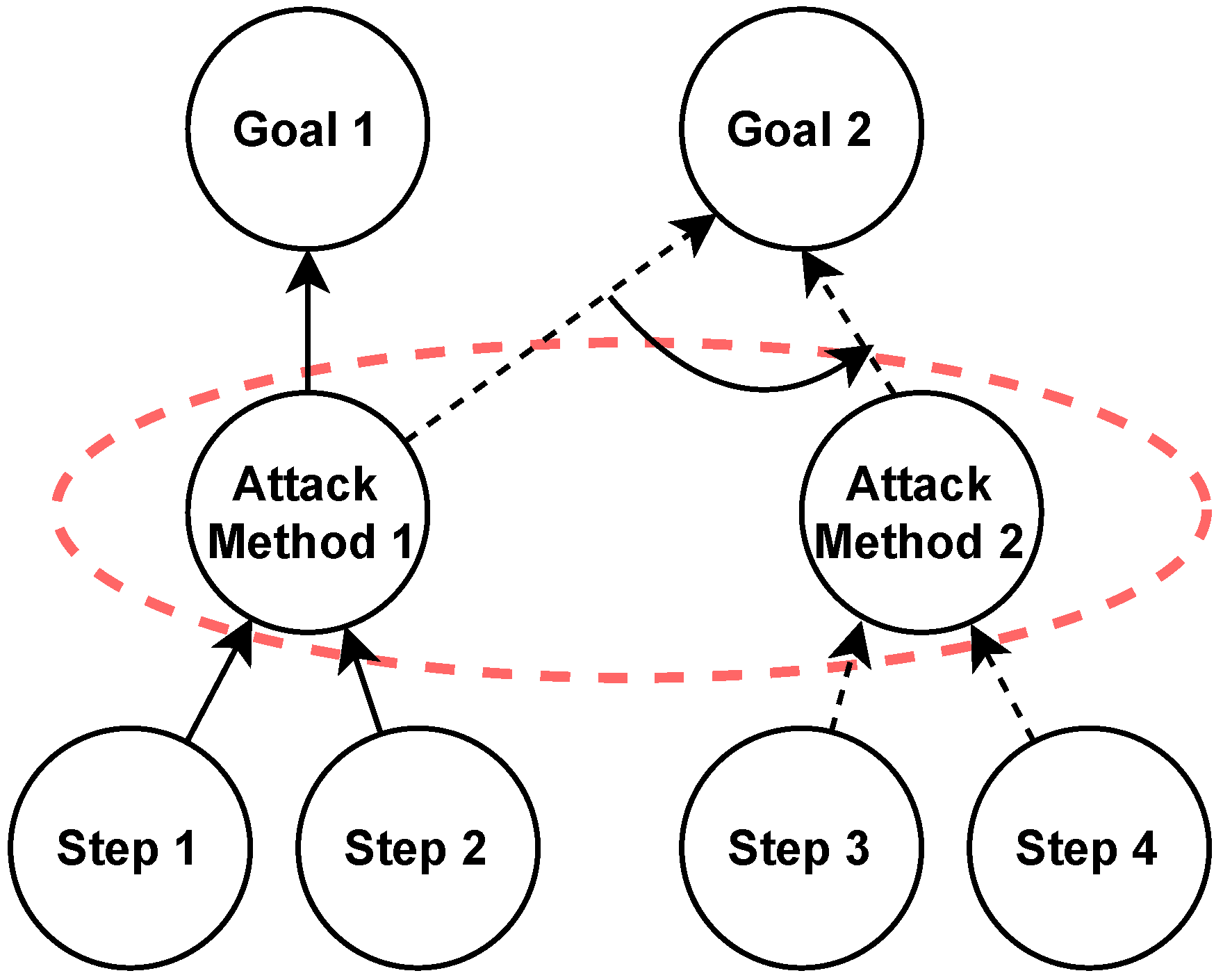
- A method to generate an integrated attack tree for multiple attacks using a system diagram.
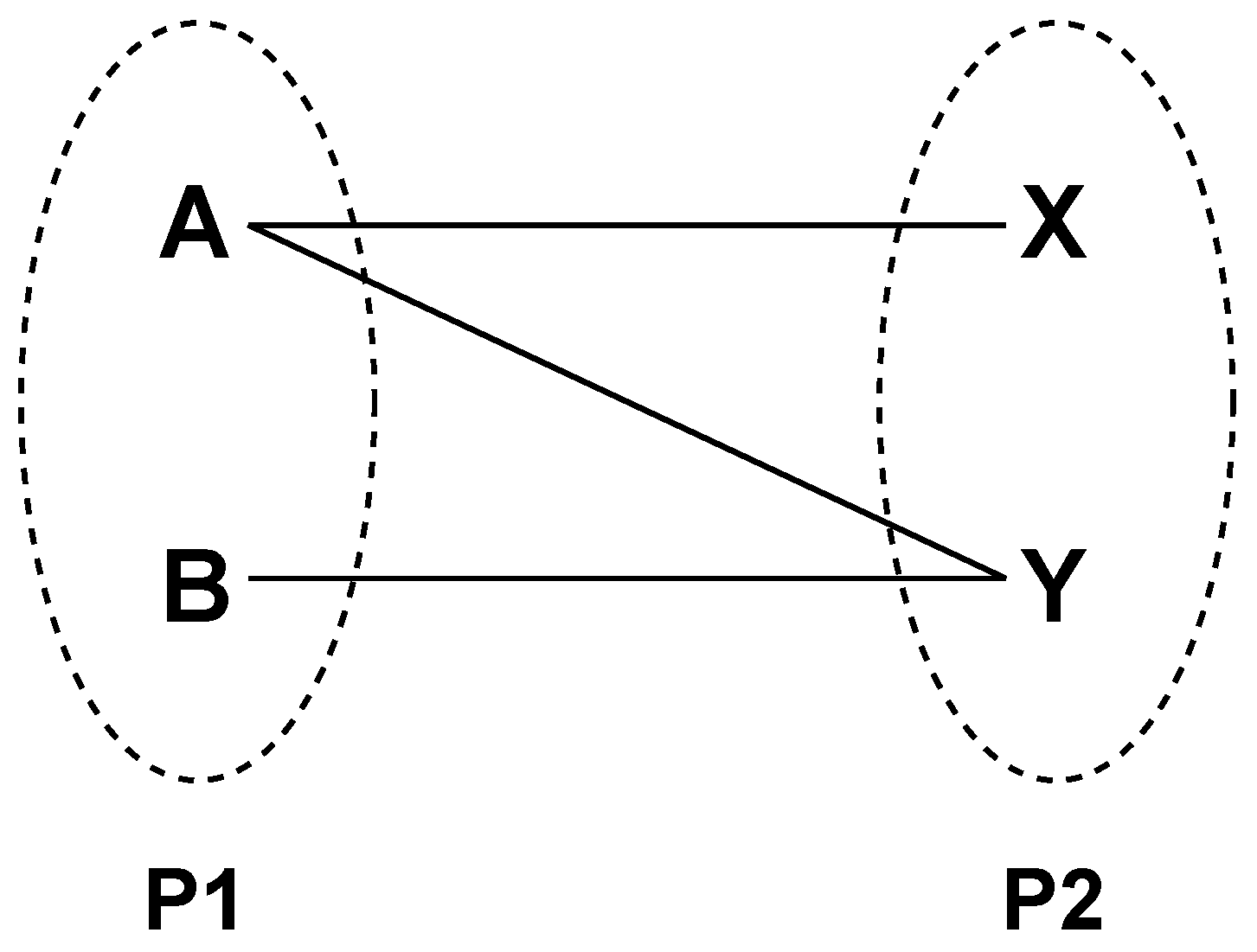
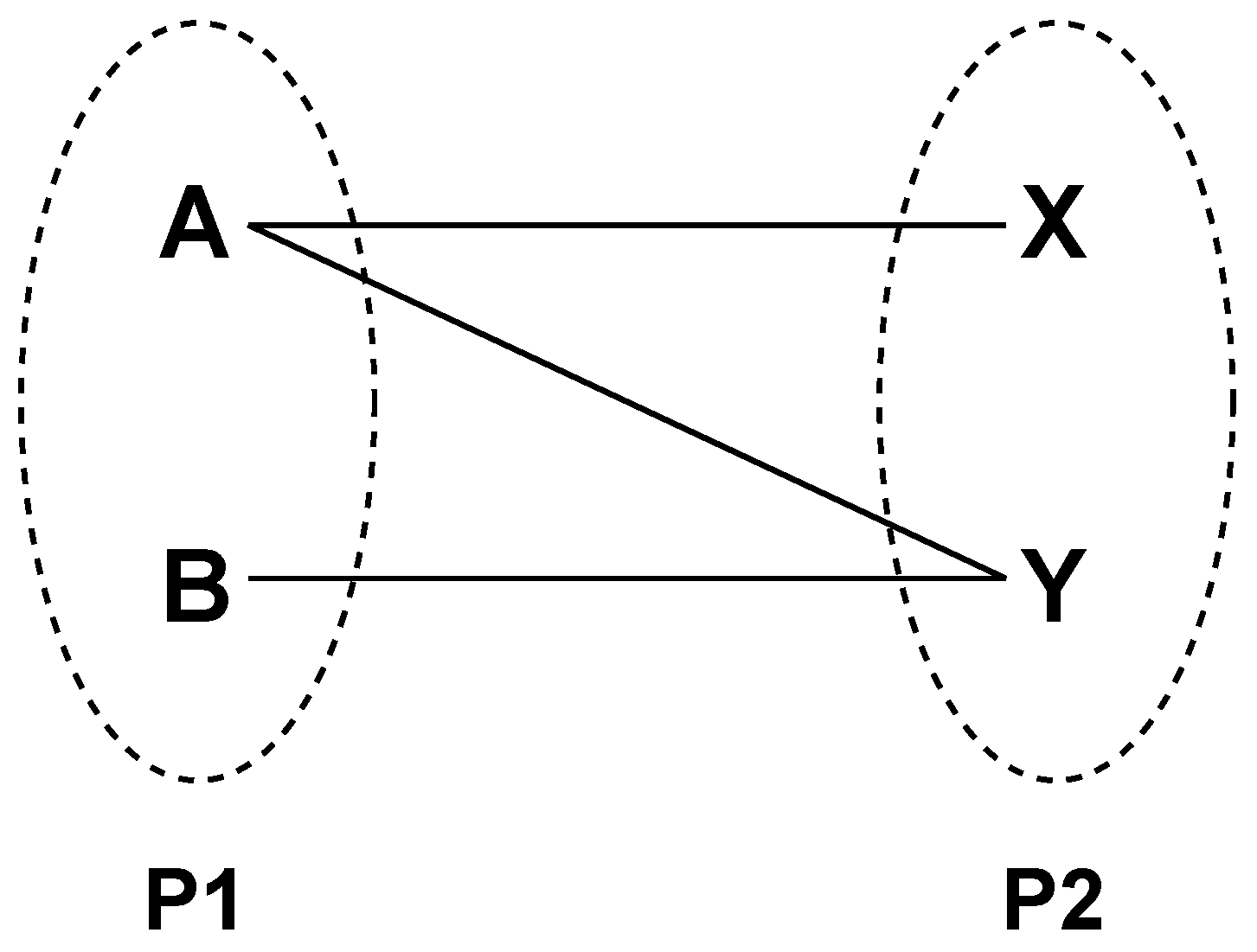
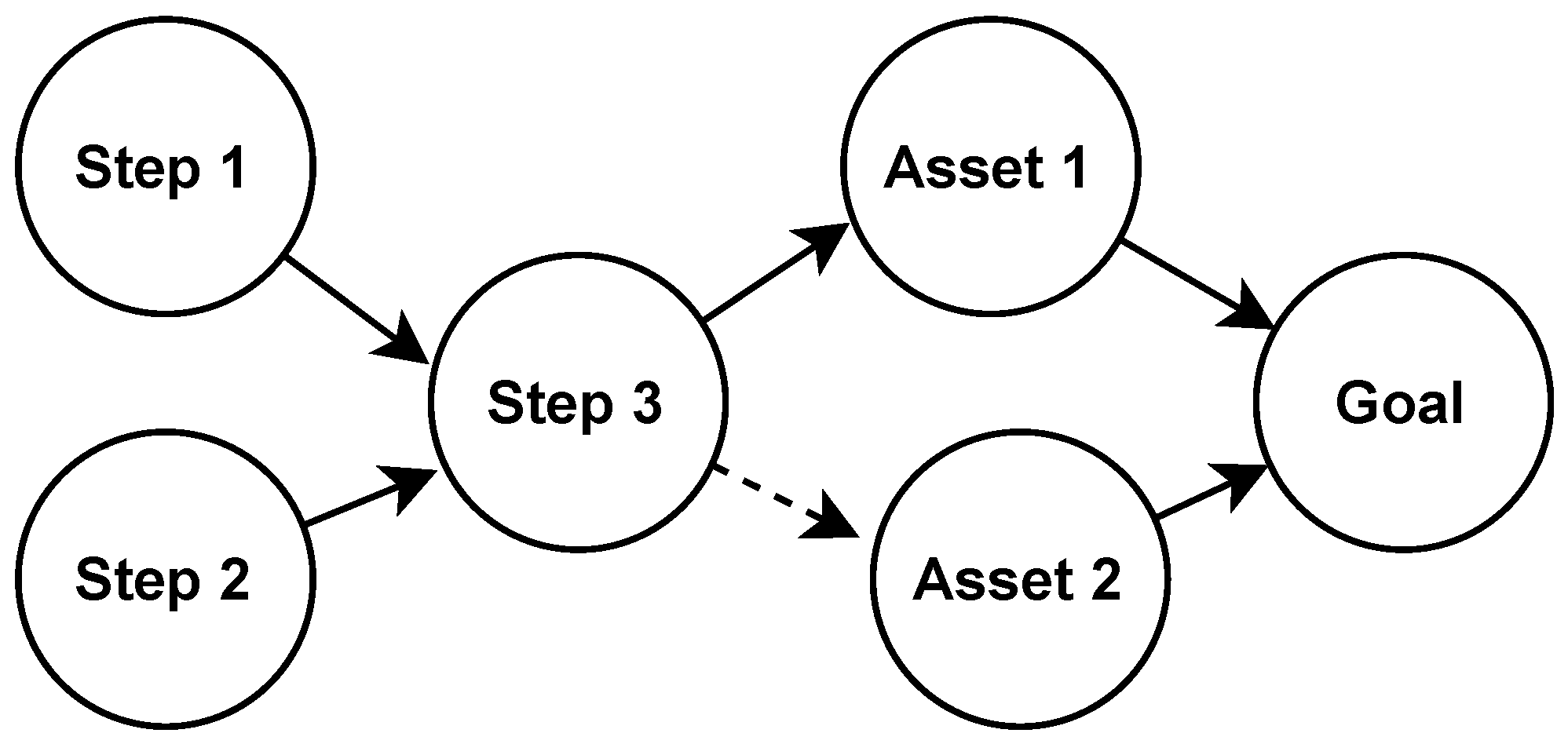
- A method to convert an attack tree to a K-partite graph.
- An algorithm to generate an integrated attack tree from a system diagram and an algorithm for generating a K-partite graph from an attack tree.
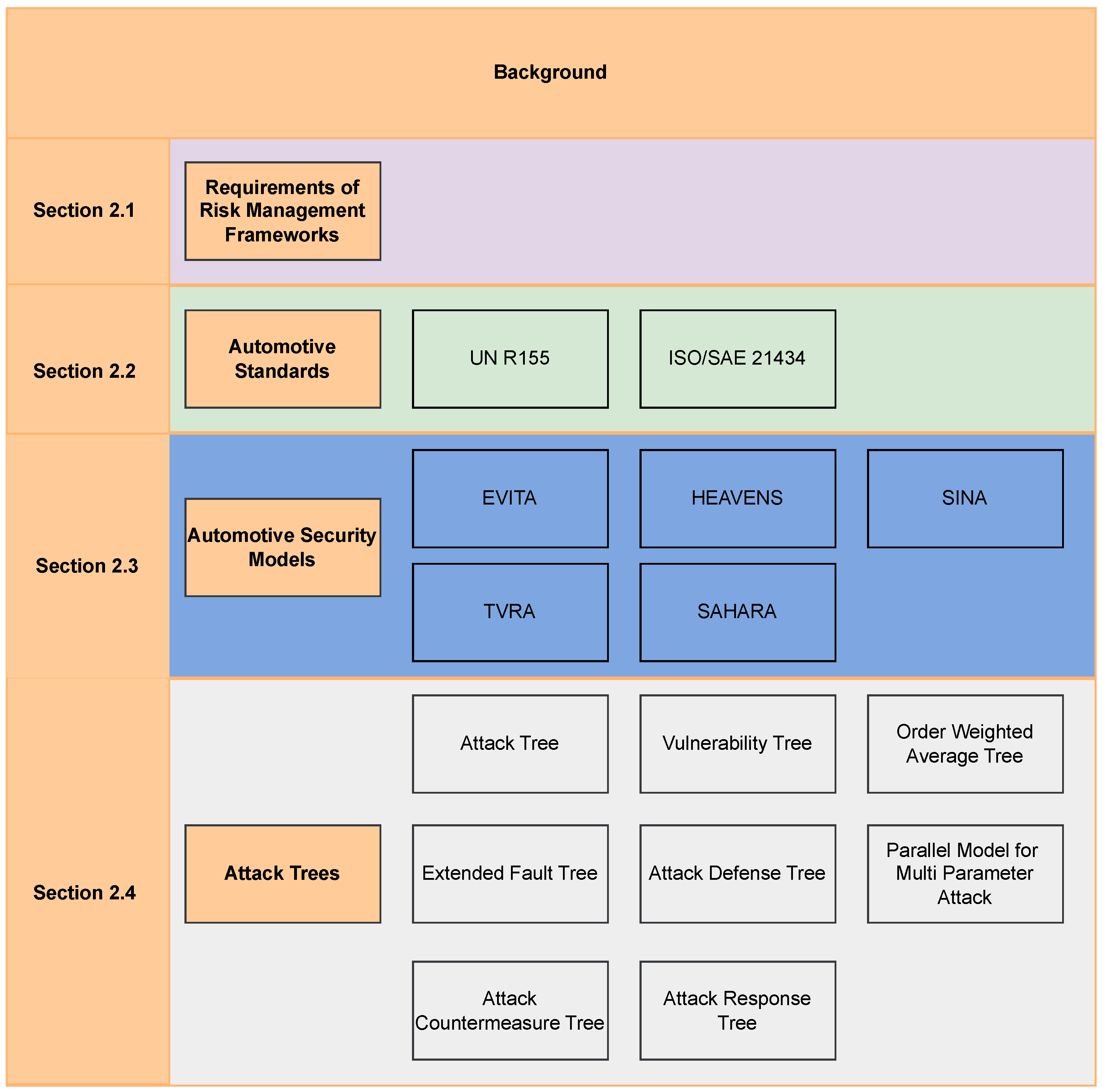
2. Background
2.1. Requirements of a Risk Management Framework
- Consistent and unified: It must adopt consistent processes within a comprehensive and unified framework, ensuring that risk is managed effectively, efficiently, and coherently across an organisation.
- Abstraction: It should support the abstraction of entities involved in the risk management process [14]. In turn, it should unleash a general approach not bound to any particular domain, permitting wide applicability.
- Scalability: It must support scalable qualitative risk management regardless of the size and complexity of the organisation.
- Automation: It should support parametrisation and automation of different phases of its execution [14].
- Ranking: It must provide simple yet intuitive indicators measuring the results of the risk management framework with respect to the risk criteria of the organisation.
- Assurance integration: It must integrate the risk management process with assurance techniques. Assurance techniques evaluate the effectiveness of the countermeasures operated by the organisation to minimise the risk and enable a realistic view thereof [11].
- Continuous Process: It should support a continuous risk management process, enabling prompt reactions to any change in the organisation and implemented countermeasures.
- Propagation: It should manage risk propagation between resources under the assumption that, in case an adverse event happens, its impact propagates to different resources [15].
2.2. Automotive Standards
2.2.1. UN R155 [16]
2.2.2. ISO/SAE 21434 [5]
2.3. Automotive Security Models
2.3.1. EVITA
2.3.2. HEAVENS
2.3.3. SINA
2.3.4. SAHARA
2.3.5. TVRA
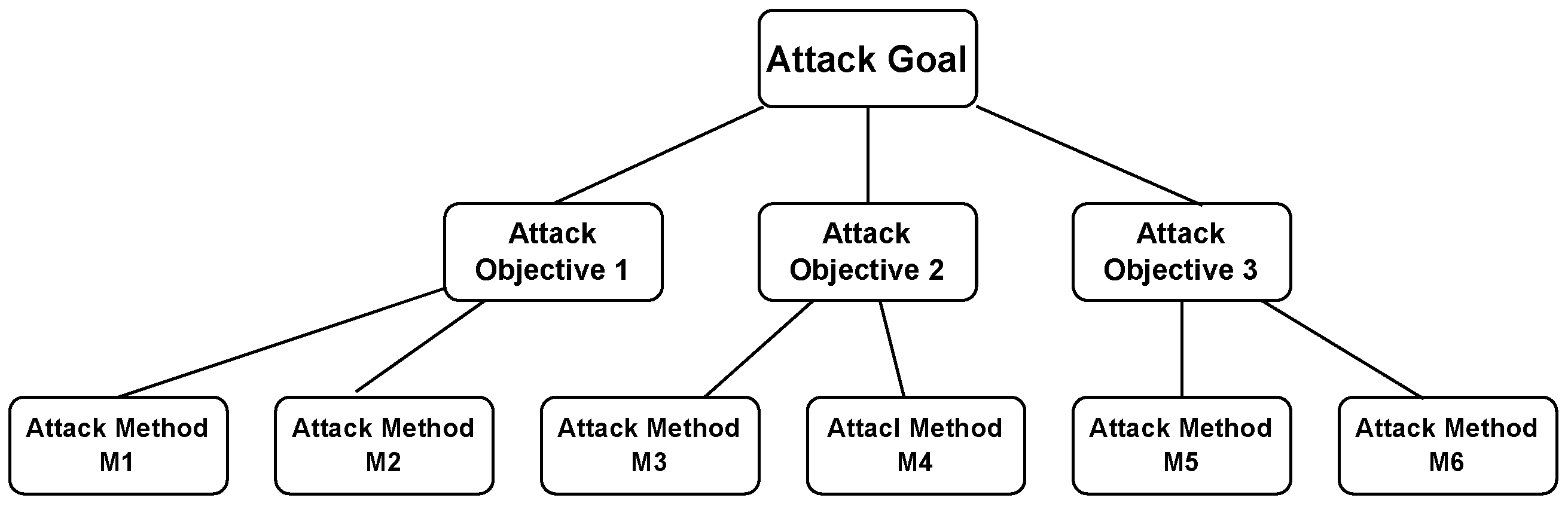
2.4. Attack Tree

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Type | Attack or Defense | Main Purpose | Connector | Short Description |
|---|---|---|---|---|
| Attack Tree (AT) [33] | Attack | Security Model | AND, OR | The primary visual structure of the attack tree was proposed in 1994 by Schiener. It includes the representation of attack steps in the form of a tree with different conjunction or disjunction. |
| Augmented Tree [35] | Attack | Security Model | AND, OR | Provides a probabilistic measure of how much an attacker can compromise a system. |
| Augmented Vulnerability Tree [36] | Attack | Risk | AND, OR | Combines fault trees, attack trees, and cause–consequence diagrams. This was used to compute the financial risk to a computer-based information system. |
| Ordered Weighted Average (OWA) [37] | Attack | Quantitative | OWA operator | Changes the AND and OR nodes to OWA nodes, quantifiers such as most, some, half, etc. It is well suited to model uncertainty where the number of actions that need to be satisfied is unknown. |
| Parallel Model for Multi-Parameter Attack [38] | Attack | Quantitative | AND, OR | Provides a method for quantitative analysis when several interdependent parameters are considered for an attack. It was believed that the attacker always chooses the most profitable attack. |
| EFT [39] | Attack | Unification | AND, OR, merge gates | Combines deliberate acts from attack trees and random failures from fault trees. |
| Attack Defence Tree (ADT) [40] | Both | Security Model | AND, OR, countermeasure | Involves both types of nodes (attack and defence). It is a combination of an attack tree and a protection tree. The proposed formalism allows putting a child node of an opposite type. |
| Attack Countermeasure Tree (ACT) [41] | Both | Security Model | AND, OR, count leaves | Has three distinct classes: attack events, detection events, and mitigation events. Automated generation of ACT is accomplished using a minimal cut set that helps to determine possible ways of attacking, defending and identifying the most critical component in a system. |
| Attack Response Tree (ART) [42] | Both | Intrusion Detection | AND, OR, response | Part of the response and recovery system in the intrusion detection system. To automate and provide instantaneous response to intrusion with minimal delay. |
3. Case Study
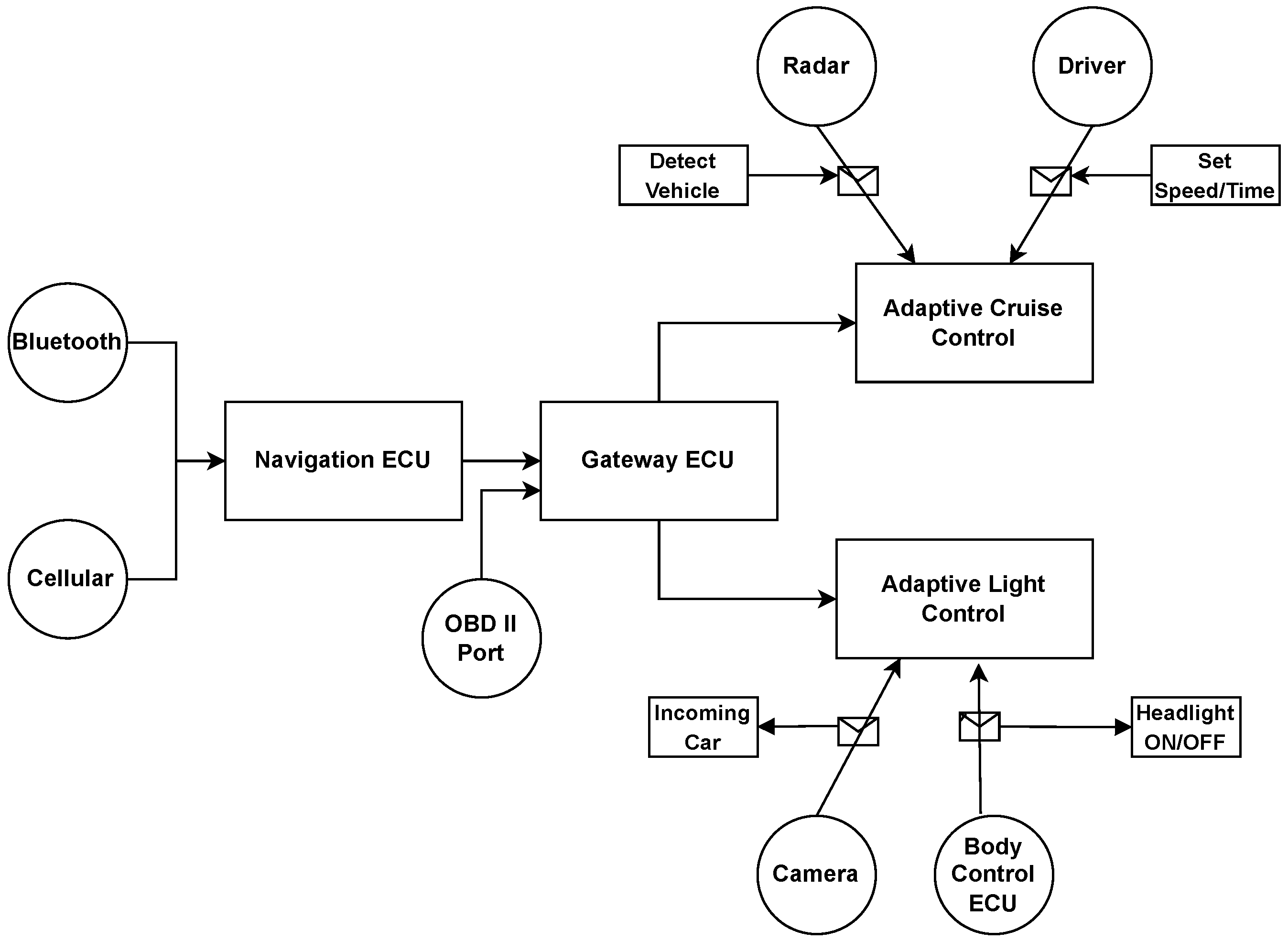
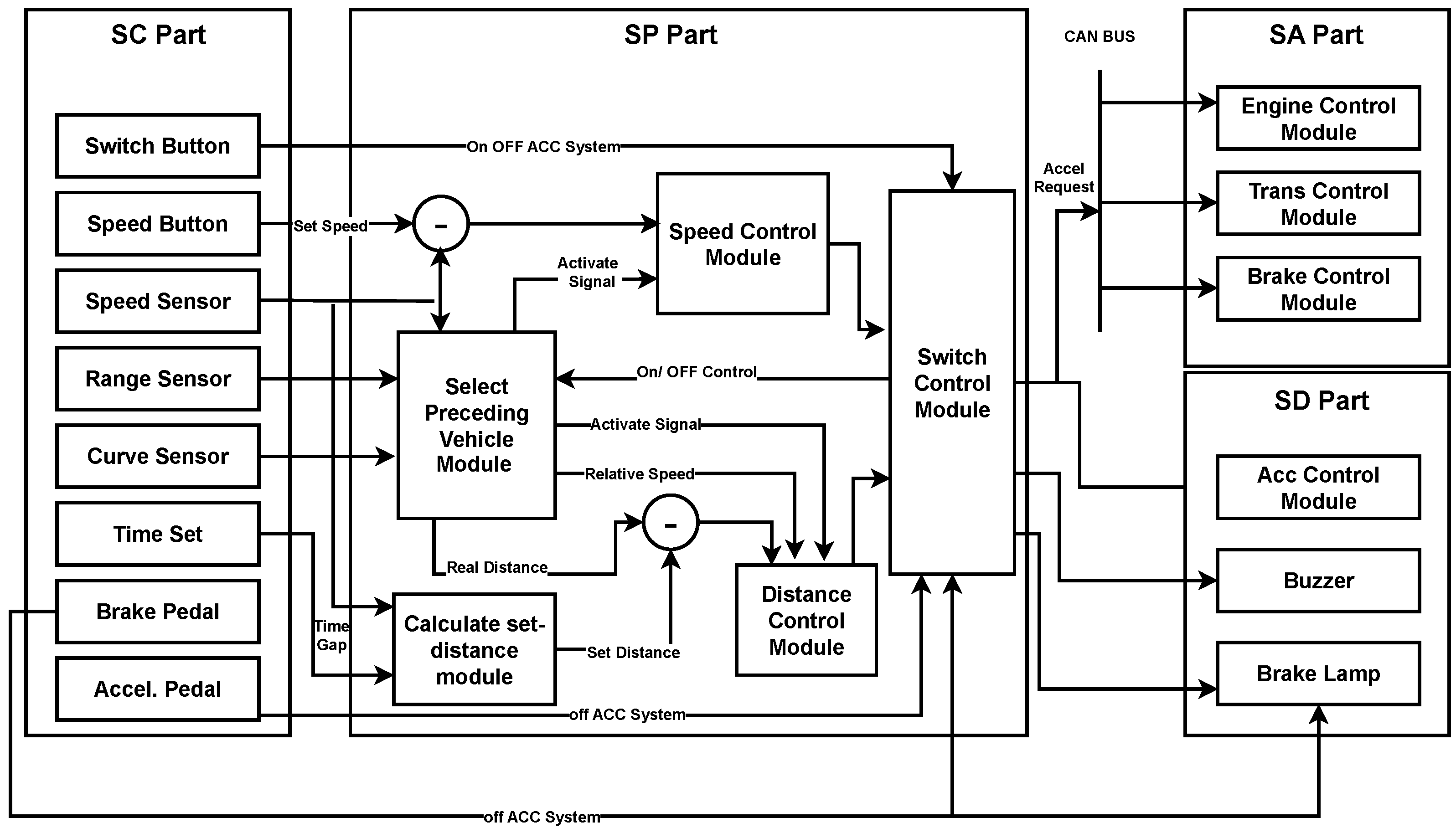
3.1. Adaptive Cruise Control
3.2. Adaptive Light Control
4. Methodology
4.1. Residual Risk Management Framework
4.2. Steps for Implementing Proposed Framework
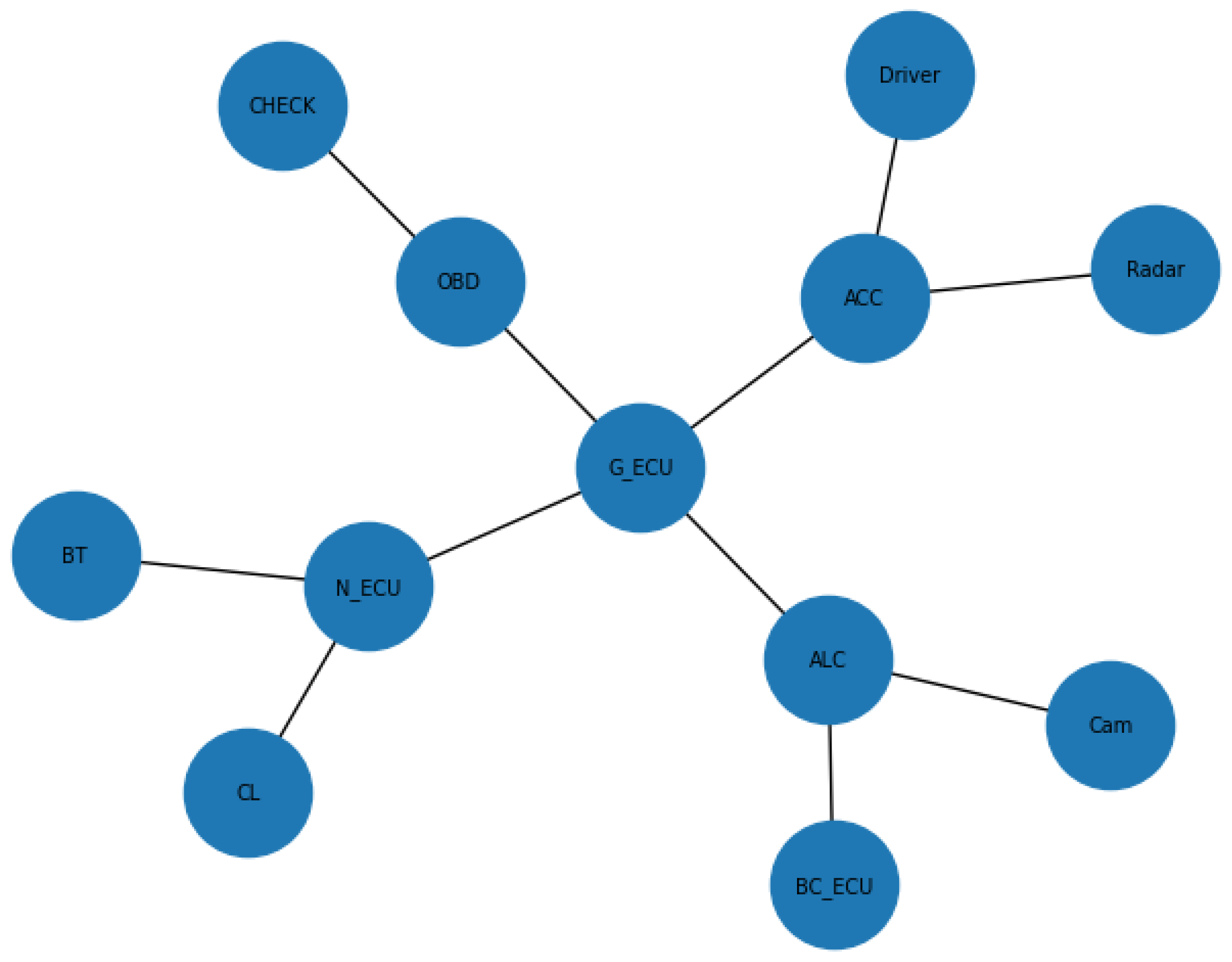
- Step 1: The input of our framework will be a system diagram of a system under consideration. Convert the system diagram to a directed graph to identify the information flow.
- Step 3: Identify the impact of each threat considering ISO/SAE 21434 <RQ-15-05>.
- Step 4: Generate a library using a K-partite graph of known attack trees.
- Step 5: Generate a detailed integrated attack tree using the directed graph of the system diagram and library of attack trees.
- Step 6: Calculate the feasibility value of each attack path using one of the suggested approaches, i.e., attack potential, CVSS, and attack-vector-based approaches in ISO/SAE 21434 <RC-15-11>.
- Step 7: Calculate the initial risk associated with each threat as a function of impact and feasibility as suggested in ISO/SAE 21434 <RQ-15-15>.
- Step 8: Identify and implement appropriate defences for all attack paths.
- Step 9: Calculate mitigated risk as placement of appropriate defences will reduce the risk, using flow graphs.
- Step 10: Calculate residual risk as the difference between initial risk and mitigated risk. If the residual risk is above an acceptable level, move back to Step 2.
5. Step-by-Step Guide for Implementing Methodology
5.1. Steps 1–3: Initialisation
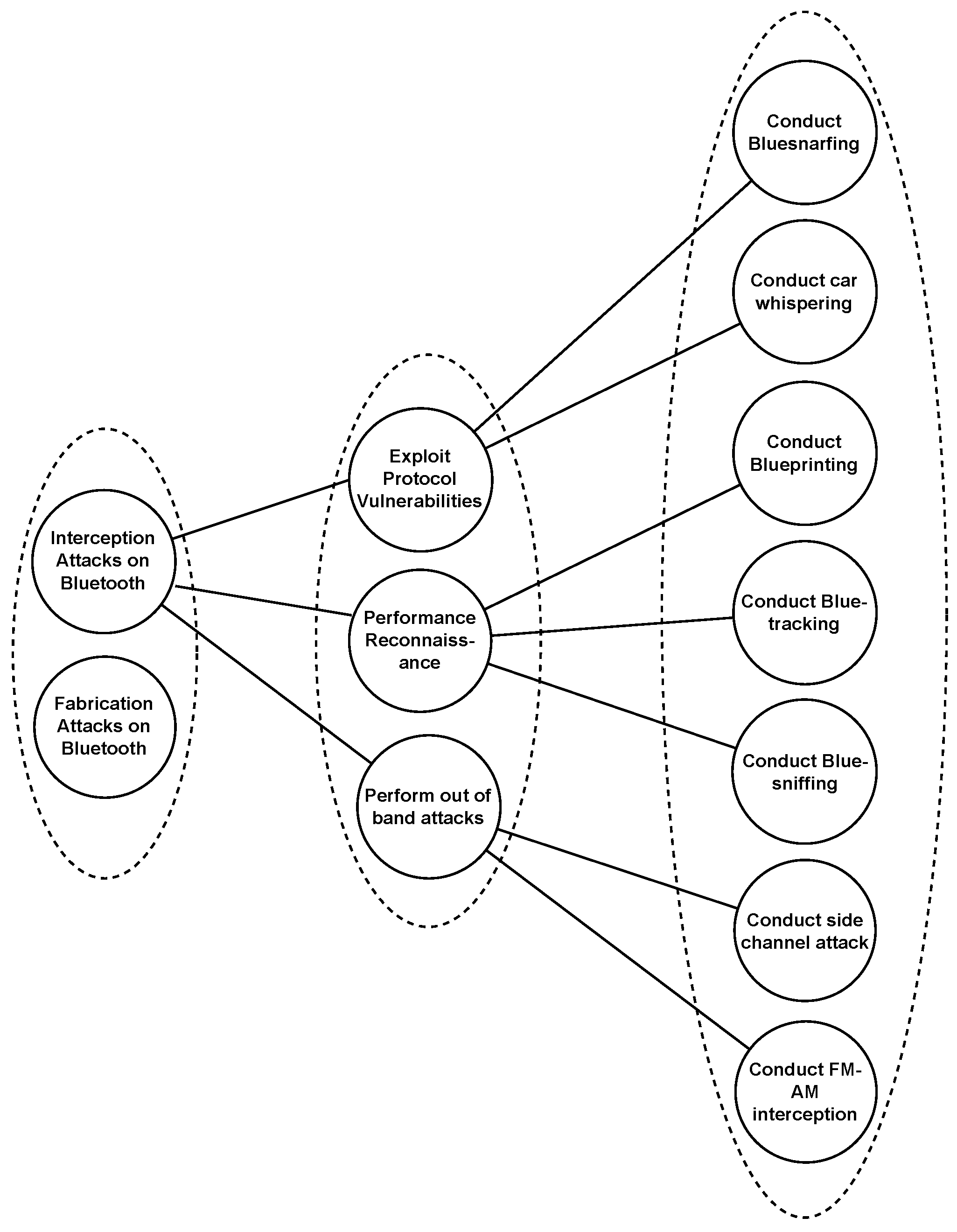
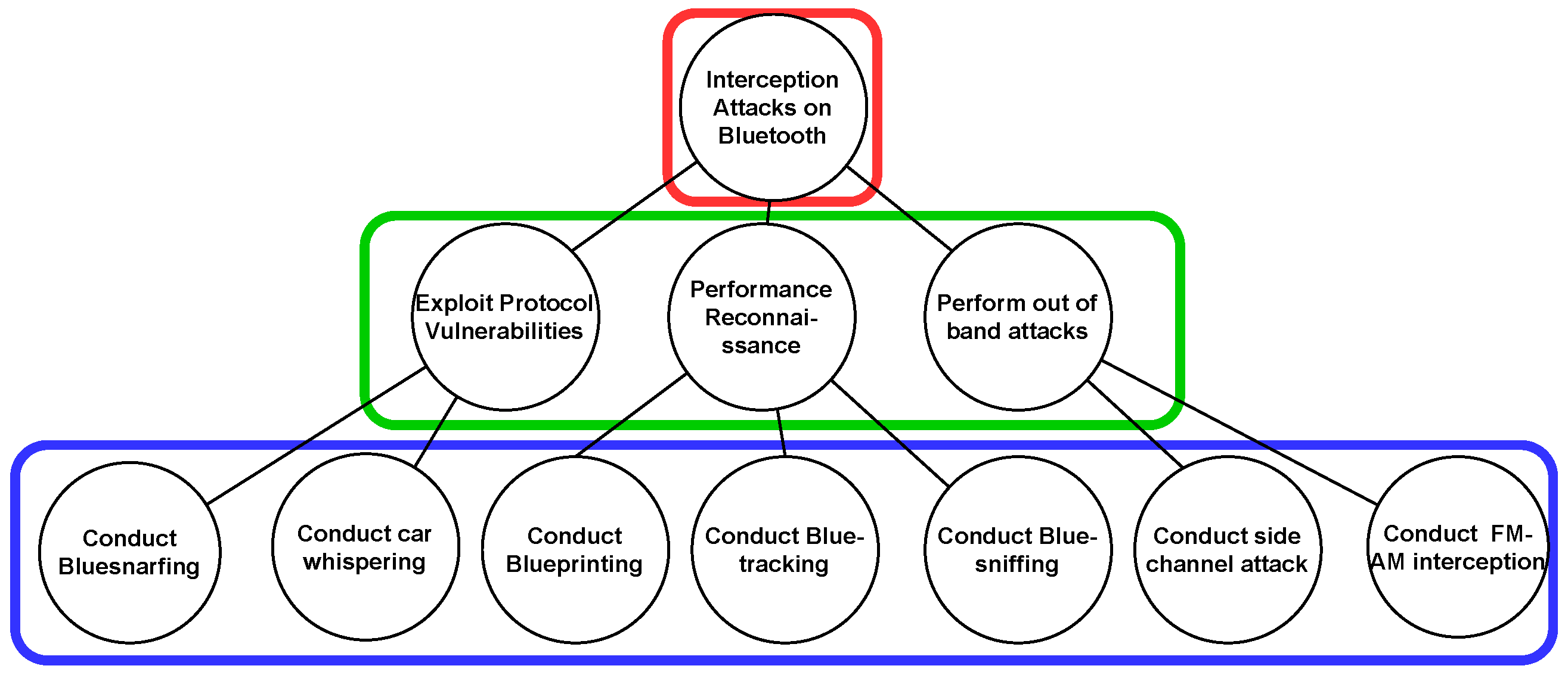
5.2. Step 4: Library Generation Using K-Partite Graphs
| Algorithm 1 K-partite Graph Generation |
|

| Algorithm 2 K-partite Graph Search |
|

- is also a minimally connected graph.
- is as A-cyclic as trees.
- is the unique root node as any other tree.
- The non-root node node has exactly one parent.
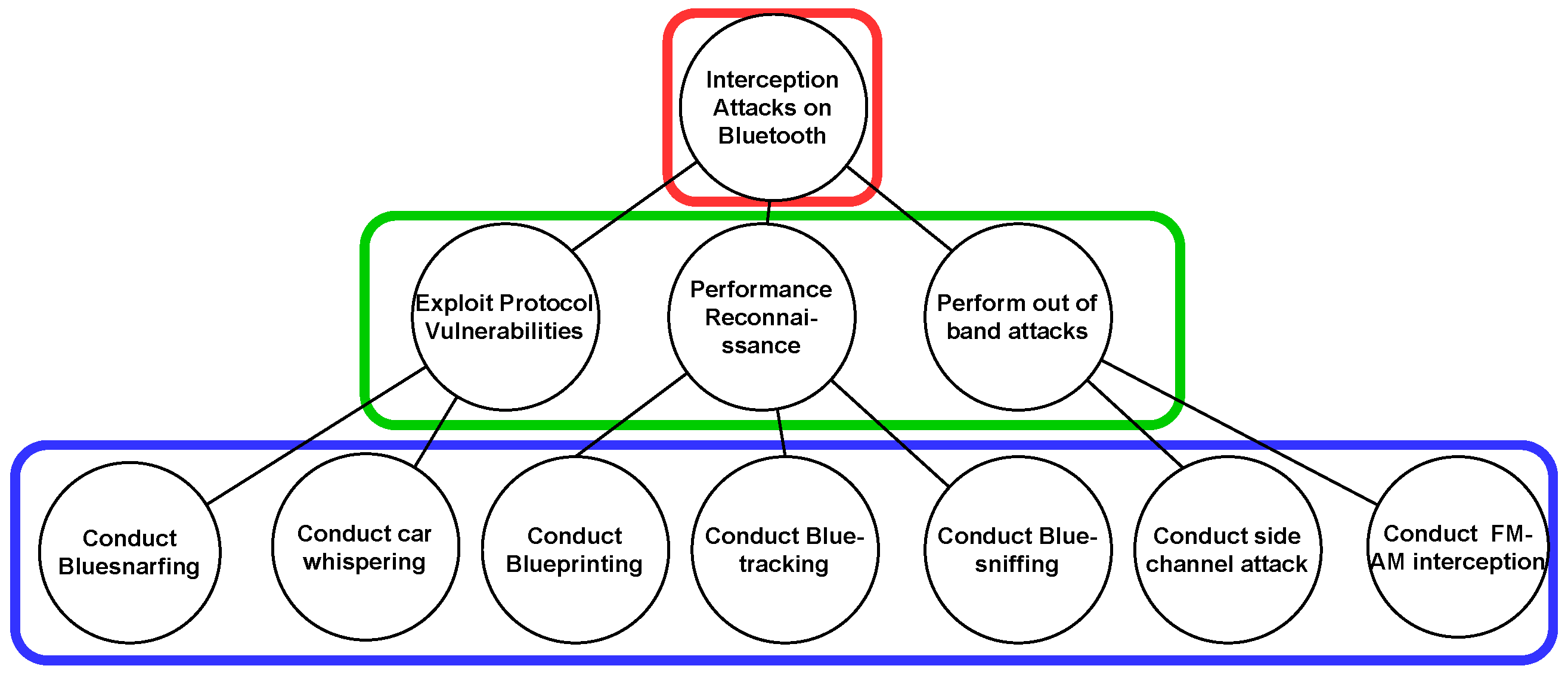
- Draw a red-colour box around the root node of T.
- Draw a green-colour box around all the children of the root node.
- Draw a blue-colour box around all the children of the nodes lying in a green-colour box.
- Continue this process for all the nodes in T, assigning each node the lowest available colour that has not been assigned to its parent or any of its children.
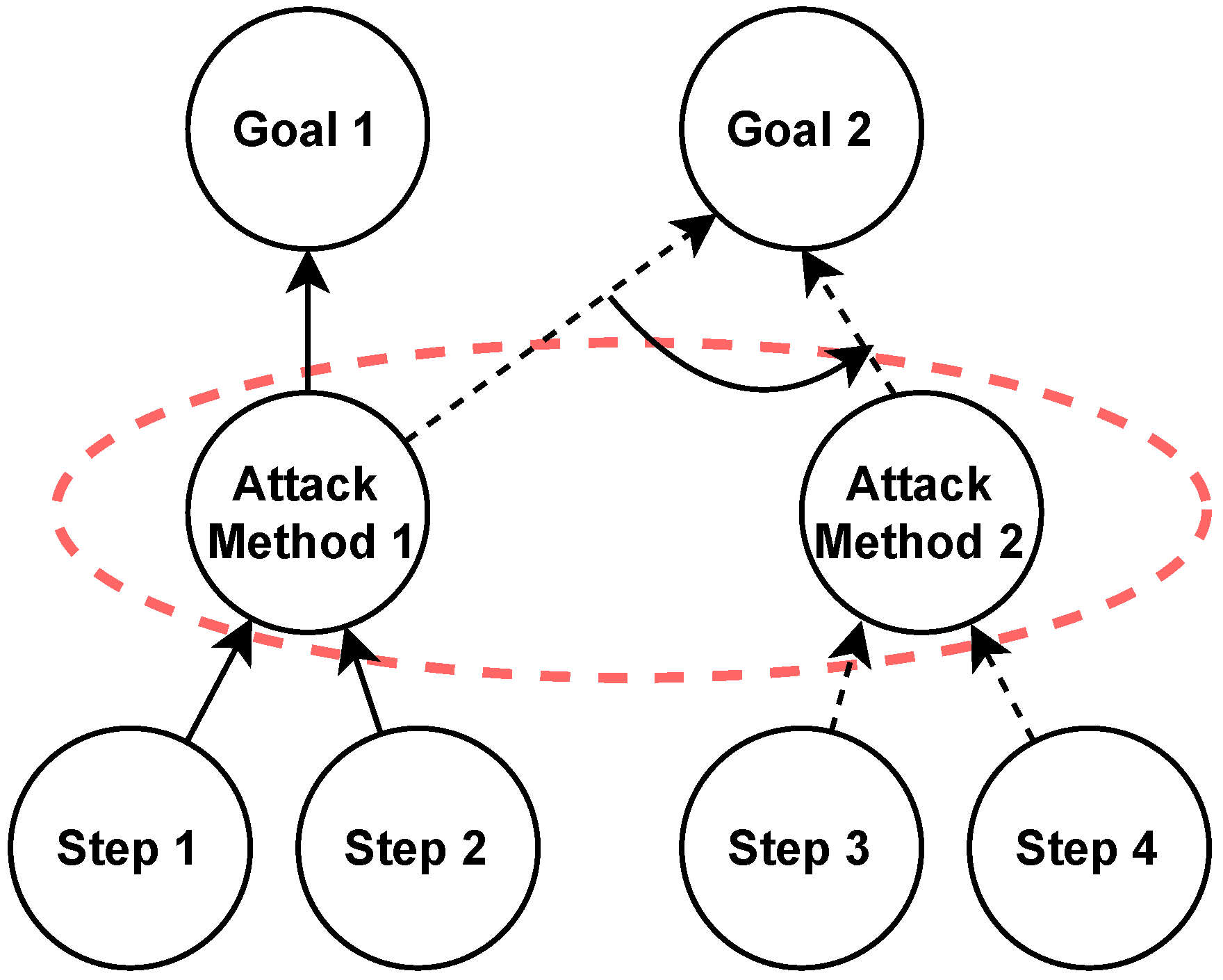
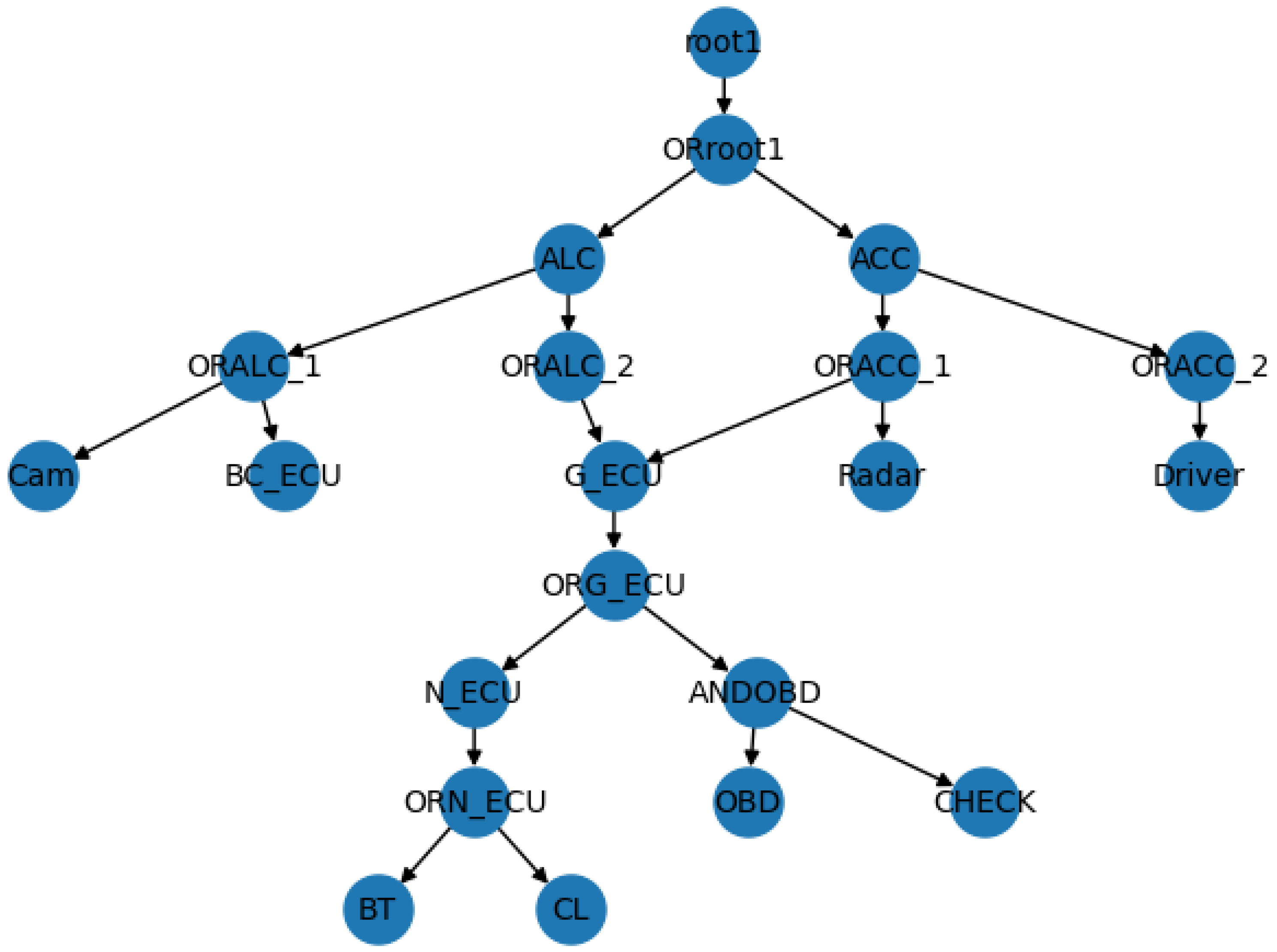
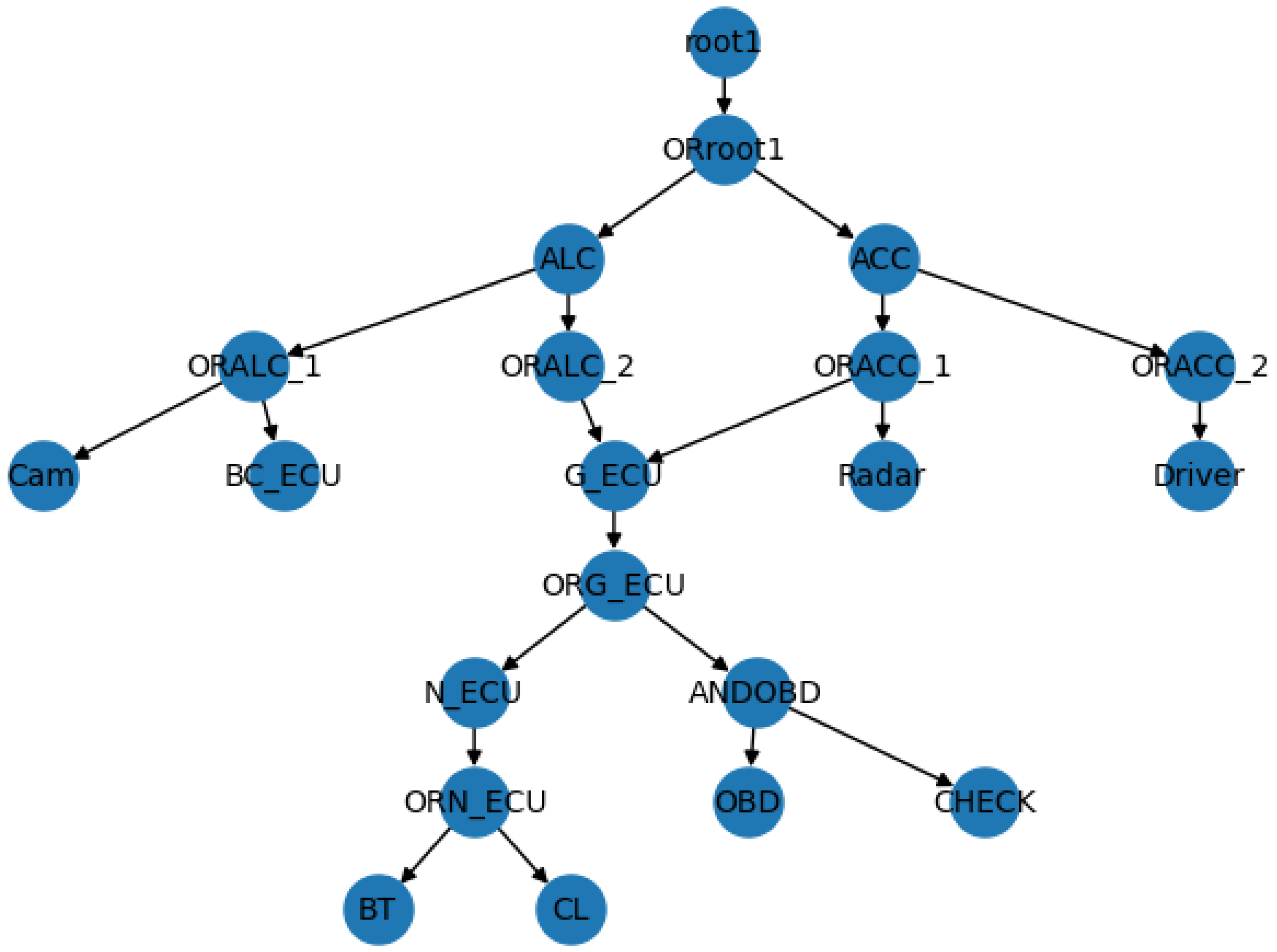
5.3. Step 5: Generation of Integrated Attack Tree
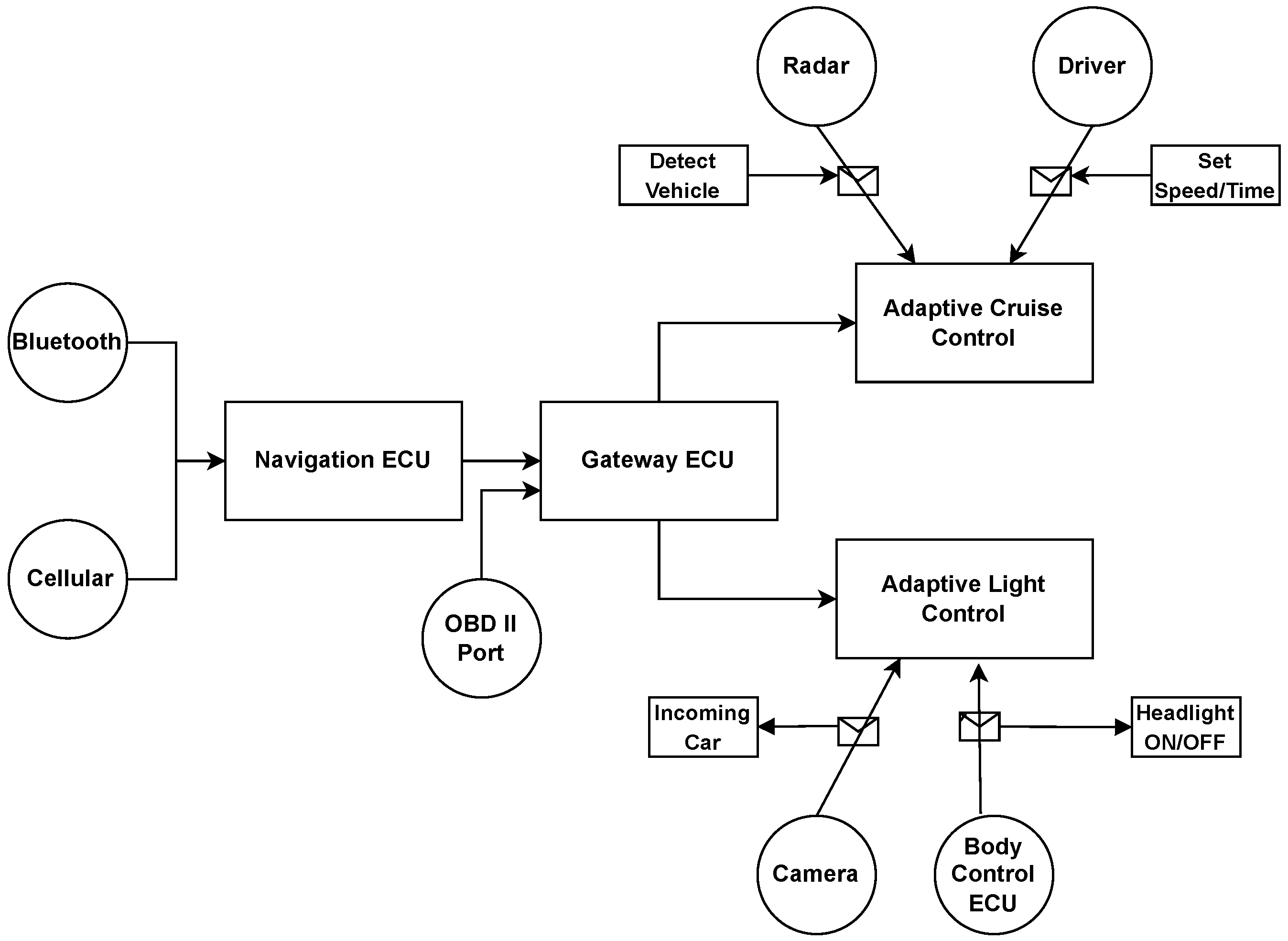
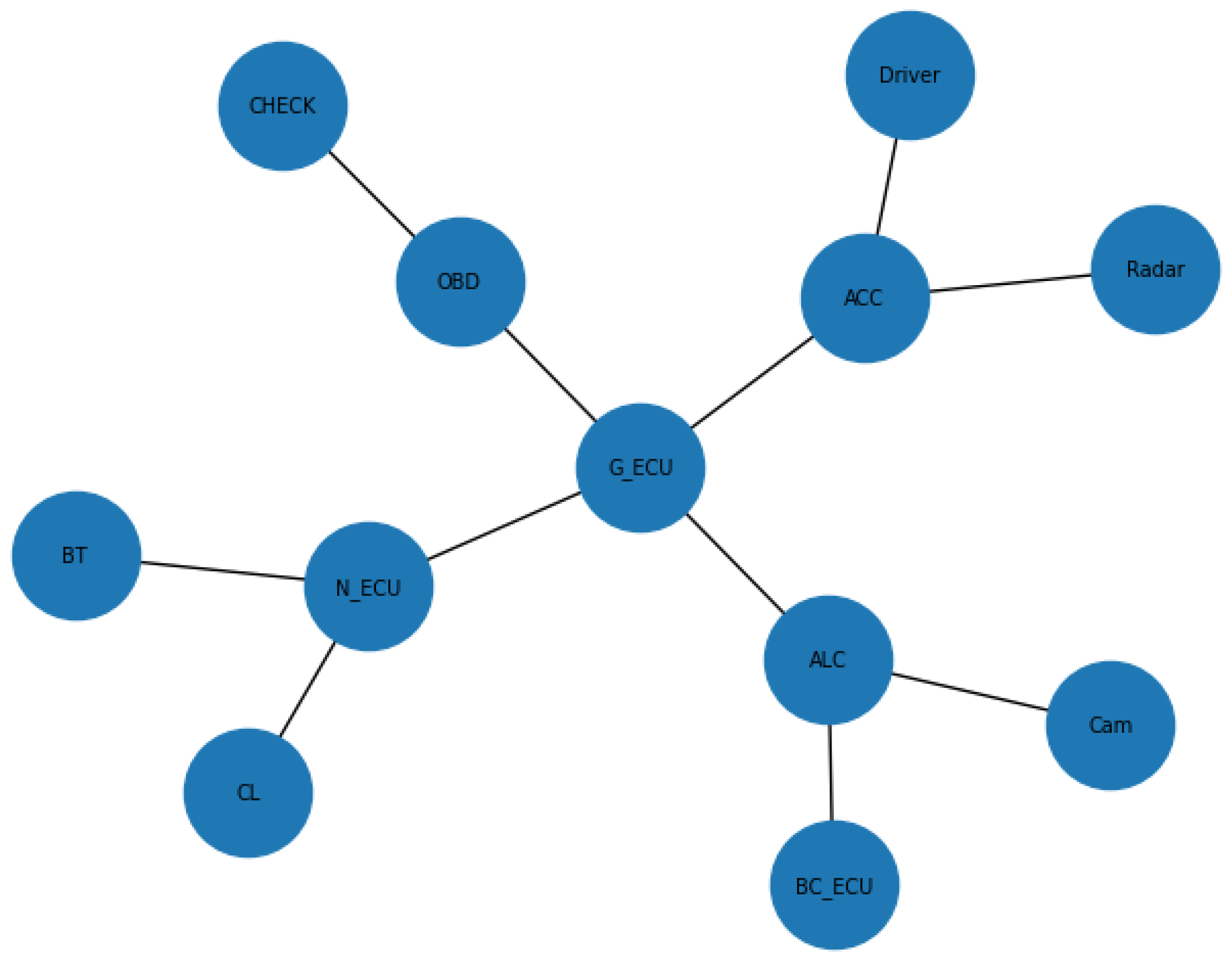
- The system diagram should indicate the information flow in it.
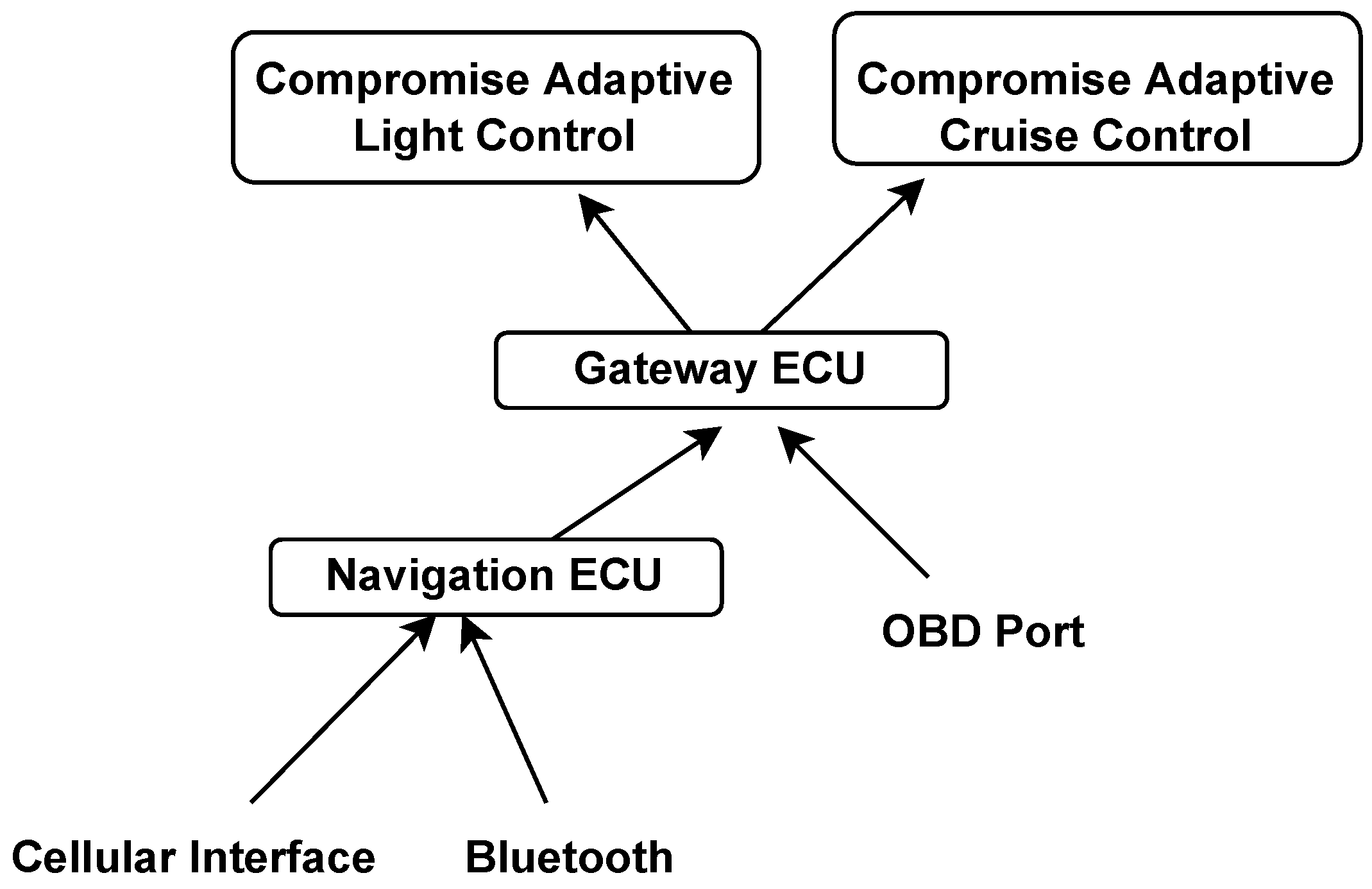
- If two entities are sequential, like Navigation ECU and Gateway ECU as shown in Figure 11, use AND conjunction between them.
- If two entities are connected to one component, use OR conjunction between them, such as ACC and ALC are connected to Gateway ECU as shown in Figure 11.

| Algorithm 3 Attack Tree from System Diagram. |
|
5.4. Steps 6–7: Initial Risk Calculation
- Asset assessment;
- Threat assessment;
- Impact and likelihood calculation.
5.5. Steps 9–10: Calculating Residual Risk Using Flow Graphs

6. Discussion
| Requirements | Satisfied | Partially Satisfied | Not Yet Satisfied | Argument |
|---|---|---|---|---|
| Follow practices and standards for risk management framework such as NIST SP 800-30 [13], ISO 31000 [12]. | ✓ | The proposed approach aligns well with ISO/SAE 21434 and NIST-SP 800. | ||
| Generic, not bound to a particular domain. | ✓ | It applies to other domains i.e., CPS, automotive | ||
| Support automation and parameterization | ✓ | Proposed an algorithmic solution to generate attack trees. | ||
| Assurance by evaluating effectiveness of countermeasure. | ✓ | Future work will cover defense identification and assurance. | ||
| Handling risk Propagation in a system. | ✓ | Visualization of a combined attack tree helps identify risk propagation from one asset. | ||
| Intuitive indicators to measure results of RMF. | ✓ | Future work will consider graph-oriented techniques for ranking threats. | ||
| Continuous risk management process. | ✓ | It follows a continual process as shown in Figure 3. | ||
| Scalable to incorporate new technologies and interfaces. | ✓ | Adding new components, handling further attacks, and finding applicable defences can be achieved using the proposed framework. | ||
| Comprehensively manage system risk. | ✓ | The scope of this work considers risk reduction. We are currently not dealing with risk avoidance, sharing, or treatment. |
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Snippets from Implementation
References
- Researchers Hack BMW Cars, Discover 14 Vulnerabilities. 2018. Available online: https://www.helpnetsecurity.com/2018/05/23/hack-bmw-cars/ (accessed on 21 May 2022).
- Hackers Remotely Kill a Jeep on the Highway—With Me in It. 2016. Available online: https://www.wired.com/2015/07/hackers-remotely-kill-jeep-highway/ (accessed on 17 November 2023).
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar]
- Team of Hackers Take Remote Control of Tesla Model S from 12 Miles Away. 2016. Available online: https://www.theguardian.com/technology/2016/sep/20/tesla-model-s-chinese-hack-remote-control-brakes (accessed on 11 November 2021).
- ISO/SAE 21434:2021; Road Vehicles—Cybersecurity Engineering. ISO: Geneva, Switzerland, 2021.
- Khan, A.; Bryans, J.; Sabaliauskaite, G. Framework for Calculating Residual Cybersecurity Risk of Threats to Road Vehicles in Alignment with ISO/SAE 21434. In Proceedings of the International Conference on Applied Cryptography and Network Security, Rome, Italy, 20–23 June 2022; Springer: Cham, Switzerland, 2022; pp. 235–247. [Google Scholar]
- Schneier, B. Attack trees. Dr. Dobb’s J. 1999, 24, 21–29. [Google Scholar]
- Macher, G.; Sporer, H.; Berlach, R.; Armengaud, E.; Kreiner, C. SAHARA: A security-aware hazard and risk analysis method. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2015; IEEE: Piscataway, NJ, USA; pp. 621–624. [Google Scholar]
- Schmittner, C.; Ma, Z.; Smith, P. FMVEA for safety and security analysis of intelligent and cooperative vehicles. In Proceedings of the International Conference on Computer Safety, Reliability, and Security, Florence, Italy, 8–9 September 2014; Springer: Cham, Switzerland, 2014; pp. 282–288. [Google Scholar]
- Anisetti, M.; Ardagna, C.A.; Bena, N.; Foppiani, A. An Assurance-Based Risk Management Framework for Distributed Systems. In Proceedings of the 2021 IEEE International Conference on Web Services (ICWS), Chicago, IL, USA, 5–10 September 2021; pp. 482–492. [Google Scholar]
- Methods for Testing & Specification; Risk-Based Security Assessment and Testing Methodologies. 2017. Available online: https://cdn.standards.iteh.ai/samples/43304/600f329d9fbd4ef1ba07a115de3097af/Methods-for-Testing-Specification-Risk-based-Security-Assessment-and-Testing-Methodologies.pdf (accessed on 17 November 2023).
- ISO 31000; Risk Management–Principles and Guidelines. International Organization for Standardization: Geneva, Switzerland, 2009.
- Joint Task Force Transformation Initiative. In Guide for Conducting Risk Assessments; Tech. Rep. NIST Special Publication (SP) 800-30, Rev.; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2012.
- Nurse, J.R.; Creese, S.; De Roure, D. Security risk assessment in internet of things systems. IT Prof. 2017, 19, 20–26. [Google Scholar] [CrossRef]
- Jahnke, M.; Thul, C.; Martini, P. Graph based metrics for intrusion response measures in computer networks. In Proceedings of the 32nd IEEE Conference on Local Computer Networks (LCN 2007), Dublin, Ireland, 15–18 October 2007; IEEE: Piscataway, NJ, USA; pp. 1035–1042. [Google Scholar]
- UNECE Regulation No. 155—Cyber Security and Cyber Security Management System. 2021. Available online: https://unece.org/transport/documents/2021/03/standards/un-regulation-no-155-cyber-security-and-cyber-security (accessed on 17 November 2023).
- Bißmeyer, N.; Frank, K.; Stefan, D.; Christian, S. PREparing SEcuRe VEhicle-to-X. 2011. Available online: https://trimis.ec.europa.eu/sites/default/files/project/documents/20121025_114452_74602_PRESERVE-D1.1-Security_Requirements_of_Vehicle_Security_Architecture.pdf (accessed on 17 November 2023).
- The EVITA Consortium, EVITA Threat and Risk Analysis. 2009. Available online: https://www.evita-project.org/Publications/Seu09.pdf (accessed on 12 September 2021).
- Open VEhiculaR SEcurE Platform (OVERSEE). 2012. Available online: https://cordis.europa.eu/project/id/248333 (accessed on 15 January 2022).
- Ruddle, A.; Ward, D.; Weyl, B.; Idrees, S.; Roudier, Y.; Friedewald, M.; Leimbach, T.; Fuchs, A.; Gürgens, S.; Henniger, O. Deliverable D2.3: Security Requirements for Automotive on-Board Networks Based on Dark-Side Scenarios. EVITA Proj. (Version 1.1). 2009; pp. 85–130. Available online: https://zenodo.org/records/1188418 (accessed on 17 November 2023).
- Common Methodology for Information Technology Security Evaluation (CEM v3.1). 2017. Available online: https://www.commoncriteriaportal.org/files/ccfiles/CEMV3.1R5.pdf (accessed on 17 November 2023).
- Olovsson, T. HEAling Vulnerabilities to ENhance Software Security and Safety (HEAVENS). 2015; pp. 33–89. Available online: https://research.chalmers.se/en/project/5809 (accessed on 20 November 2018).
- ISO/IEC 15408-1:2009; Information Technology—Security Techniques—Evaluation Criteria for IT Security. ISO: Geneva, Switzerland, 2009.
- Schmidt, K.; Tröger, P.; Kroll, H.M.; Bünger, T.; Krueger, F.; Neuhaus, C. Adapted development process for security in networked automotive systems. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2014, 7, 516–526. [Google Scholar] [CrossRef]
- Intelligent Transport Systems (ITS). In Security; Threat, Vulnerability and Risk Analysis (TVRA). ETSI TR 102 893 V1.2.1 March 2017. Available online: https://cdn.standards.iteh.ai/samples/35784/df77f1b9ab9e4be88965c14a9f0d49d7/ETSI-TR-102-893-V1-2-1-2017-03-.pdf (accessed on 17 November 2023).
- Le, A.; Maple, C. A simplified approach for dynamic security risk management in connected and autonomous vehicles. In Proceedings of the Living in the Internet of Things (IoT 2019), London, UK, 1–2 May 2019; pp. 1–8. [Google Scholar]
- Salfer, M.; Eckert, C. Attack graph-based assessment of exploitability risks in automotive on-board networks. In Proceedings of the 13th International Conference on Availability, Reliability and Security, Hamburg Germany, 27–30 August 2018; pp. 1–10. [Google Scholar]
- Park, S.; Park, H. PIER: Cyber-resilient risk assessment model for connected and autonomous vehicles. Wirel. Netw. 2022, 28, 1–15. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, B. VeRA: A simplified security risk analysis method for autonomous vehicles. IEEE Trans. Veh. Technol. 2020, 69, 10494–10505. [Google Scholar] [CrossRef]
- Reich, J.; Trapp, M. SINADRA: Towards a framework for assurable situation-aware dynamic risk assessment of autonomous vehicles. In Proceedings of the 2020 16th European Dependable Computing Conference (EDCC), Munich, Germany, 7–10 September 2020; IEEE: Piscataway, NJ, USA; pp. 47–50. [Google Scholar]
- Won, D.H.; Kim, S. Foundations of attack trees. In Proceedings of the Information Security and Cryptology-ICISC, Seoul, Republic of Korea, 1–2 December 2005; Volume 2006. [Google Scholar]
- Weiss, J.D. A system security engineering process. In Proceedings of the 14th National Computer Security Conference, Washington, DC, USA, 1–4 October 1991; Volume 249, pp. 572–581. [Google Scholar]
- Salter, C.; Saydjari, O.S.; Schneier, B.; Wallner, J. Toward a secure system engineering methodolgy. In Proceedings of the 1998 Workshop on New Security Paradigms, Charlottsville, VA, USA, 22–25 September 1998; pp. 2–10. [Google Scholar]
- Amoroso, E.G. Fundamentals of Computer Security Technology; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Ray, I.; Poolsapassit, N. Using attack trees to identify malicious attacks from authorized insiders. In Proceedings of the European Symposium on Research in Computer Security, Milan, Italy, 12–14 September 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 231–246. [Google Scholar]
- Patel, S.C.; Graham, J.H.; Ralston, P.A. Quantitatively assessing the vulnerability of critical information systems: A new method for evaluating security enhancements. Int. J. Inf. Manag. 2008, 28, 483–491. [Google Scholar] [CrossRef]
- Yager, R.R. OWA trees and their role in security modeling using attack trees. Inf. Sci. 2006, 176, 2933–2959. [Google Scholar] [CrossRef]
- Jürgenson, A.; Willemson, J. Processing multi-parameter attacktrees with estimated parameter values. In Proceedings of the International Workshop on Security, Nara, Japan, 29–31 October 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 308–319. [Google Scholar]
- Aven, T.; Vinnem, J.E. Risk, Reliability and Societal Safety; Taylor & Francis: Abingdon, UK, 2007. [Google Scholar]
- Kordy, B.; Mauw, S.; Radomirović, S.; Schweitzer, P. Foundations of attack–defense trees. In Proceedings of the International Workshop on Formal Aspects in Security and Trust, Pisa, Italy, 16–17 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 80–95. [Google Scholar]
- Roy, A.; Kim, D.S.; Trivedi, K.S. ACT: Attack countermeasure trees for information assurance analysis. In Proceedings of the 2010 INFOCOM IEEE Conference on Computer Communications Workshops, San Diego, CA, USA, 15–19 March 2010; IEEE: Piscataway, NJ, USA; pp. 1–2. [Google Scholar]
- Zonouz, S.A. Game-Theoretic Intrusion Response and Recovery; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2011. [Google Scholar]
- Tanu, E.; Arreymbi, J. An examination of the security implications of the supervisory control and data acquisition (SCADA) system in a mobile networked environment: An augmented vulnerability tree approach. In Proceedings of the Advances in Computing and Technology, (AC&T) The School of Computing and Technology 5th Annual Conference, London, UK, 14 September 2010. [Google Scholar]
- Poolsapassit, N.; Ray, I. Investigating computer attacks using attack trees. In Proceedings of the IFIP International Conference on Digital Forensics, Orlando, FL, USA, 28–31 January 2007; Springer: New York, NY, USA, 2007; pp. 331–343. [Google Scholar]
- Jürgenson, A.; Willemson, J. Computing exact outcomes of multi-parameter attack trees. In Proceedings of the OTM Confederated International Conferences “On the Move to Meaningful Internet Systems”, Monterrey, Mexico, 9–14 November 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1036–1051. [Google Scholar]
- Jürgenson, A.; Willemson, J. Serial model for attack tree computations. In Proceedings of the International Conference on Information Security and Cryptology, Seoul, Republic of Korea, 2–4 December 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 118–128. [Google Scholar]
- Jürgenson, A.; Willemson, J. On fast and approximate attack tree computations. In Proceedings of the International Conference on Information Security Practice and Experience, Seoul, Republic of Korea, 12–13 May 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 56–66. [Google Scholar]
- Niitsoo, M. Optimal adversary behavior for the serial model of financial attack trees. In Proceedings of the International Workshop on Security, Kobe, Japan, 22–24 November 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 354–370. [Google Scholar]
- Buldas, A.; Lenin, A. New efficient utility upper bounds for the fully adaptive model of attack trees. In Proceedings of the International Conference on Decision and Game Theory for Security, Fort Worth, TX, USA, 11–12 November 2013; Springer: Cham, Switzerland, 2013; pp. 192–205. [Google Scholar]
- Buldas, A.; Laud, P.; Priisalu, J.; Saarepera, M.; Willemson, J. Rational choice of security measures via multi-parameter attack trees. In Proceedings of the International Workshop on Critical Information Infrastructures Security, Samos Island, Greece, 31 August–1 September 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 235–248. [Google Scholar]
- Buldas, A.; Mägi, T. Practical security analysis of e-voting systems. In Proceedings of the International Workshop on Security, Nara, Japan, 29–31 October 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 320–335. [Google Scholar]
- Fovino, I.N.; Masera, M.; De Cian, A. Integrating cyber attacks within fault trees. Reliab. Eng. Syst. Saf. 2009, 94, 1394–1402. [Google Scholar] [CrossRef]
- Roy, A. Attack Countermeasure Trees: A Non-State-Space Approach towards Analyzing Security and Finding Optimal Countermeasure Sets. Ph.D. Thesis, Duke University, Durham, NC, USA, 2010. [Google Scholar]
- Roy, A.; Kim, D.S.; Trivedi, K.S. Cyber security analysis using attack countermeasure trees. In Proceedings of the Sixth Annual Workshop on Cyber Security and Information Intelligence Research, Oak Ridge, TN, USA, 21–23 April 2010; pp. 1–4. [Google Scholar]
- Zonouz, S.A.; Khurana, H.; Sanders, W.H.; Yardley, T.M. RRE: A game-theoretic intrusion response and recovery engine. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 395–406. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Mahadevan, R.K.; Gurusamy, M. Adaptive Headlight Control System. J. Phys. Conf. Ser. IOP Publ. 2021, 1969, 012059. [Google Scholar] [CrossRef]
- Potter, B. Microsoft SDL threat modelling tool. Netw. Secur. 2009, 2009, 15–18. [Google Scholar] [CrossRef]
- Schmittner, C.; Chlup, S.; Fellner, A.; Macher, G.; Brenner, E. ThreatGet: Threat modeling based approach for automated and connected vehicle systems. In Proceedings of the AmE 2020-Automotive Meets Electronics, 11th GMM-Symposium, Dortmund, Germany, 10–11 March 2020; VDE: Frankfurt am Main, Germany, 2020; pp. 1–3. [Google Scholar]
- Asratian, A.S.; Denley, T.M.; Häggkvist, R. Bipartite Graphs and Their Applications; Cambridge University Press: Cambridge, UK, 1998; Volume 131. [Google Scholar]
- Lounis, K.; Zulkernine, M. Attacks and defenses in short-range wireless technologies for IoT. IEEE Access 2020, 8, 88892. [Google Scholar] [CrossRef]
- Goldberg, A.V.; Tarjan, R.E. A new approach to the maximum-flow problem. J. ACM 1988, 35, 921–940. [Google Scholar] [CrossRef]
- Mahmood, S.; Nguyen, H.N.; Shaikh, S.A. Systematic threat assessment and security testing of automotive over-the-air (OTA) updates. Veh. Commun. 2022, 35, 100468. [Google Scholar] [CrossRef]

| Security Model | Application | Threat Model | Impact | Inputs | Outputs |
|---|---|---|---|---|---|
| EVITA | Vehicular IT System | Attack Tree | Safety, Financial, Operational, Privacy | Cases and Assets | Attack Scenario, Security Requirements, Risk Level |
| HEAVENS | Vehicular Electrical/ Electronic System | STRIDE | Safety, Financial, Operational, Privacy | Functional Use Case | Risk Matrix, Threat Level, High-Level Security Requirements |
| SINA | Connect Vehicles | STRIDE, Attack Tree | Safety | System Use Case | Threats, Failure Mode, Severity |
| SAHARA | Automotive Embedded System | STRIDE | Safety | Safety Analysis | Threat Level, Security Level |
| TVRA | Communications and ITS | TVRA for Telecommunication | Operational, Finance | Target of Evaluation | Risk, Counter Measures |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, A.N.; Bryans, J.; Sabaliauskaite, G.; Jadidbonab, H. Integrated Attack Tree in Residual Risk Management Framework. Information 2023, 14, 639. https://doi.org/10.3390/info14120639
Khan AN, Bryans J, Sabaliauskaite G, Jadidbonab H. Integrated Attack Tree in Residual Risk Management Framework. Information. 2023; 14(12):639. https://doi.org/10.3390/info14120639
Chicago/Turabian StyleKhan, Ahmed Nawaz, Jeremy Bryans, Giedre Sabaliauskaite, and Hesamaldin Jadidbonab. 2023. "Integrated Attack Tree in Residual Risk Management Framework" Information 14, no. 12: 639. https://doi.org/10.3390/info14120639
APA StyleKhan, A. N., Bryans, J., Sabaliauskaite, G., & Jadidbonab, H. (2023). Integrated Attack Tree in Residual Risk Management Framework. Information, 14(12), 639. https://doi.org/10.3390/info14120639